Пристрій для визначення маршруту в графі
Номер патенту: 91199
Опубліковано: 25.06.2014
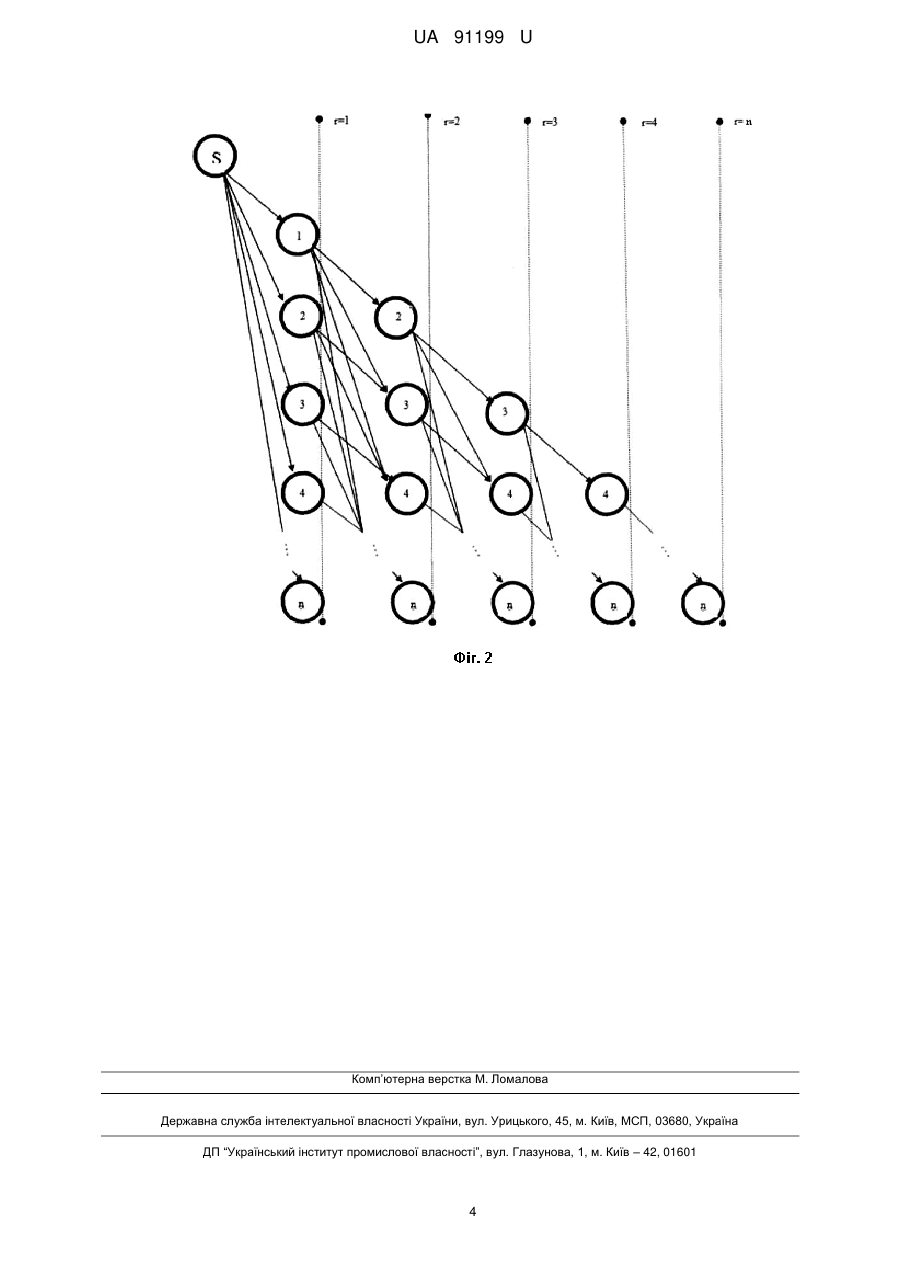
Автори: Нємченко Сергій Васильович, Третяк В'ячеслав Федорович, Лістровий Сергій Володимирович, Малюга Володимир Геннадійович, Місюра Олег Миколайович, Ткачов Андрій Михайлович, Нерубацький Володимир Омельянович, Андрощук Олександр Степанович, Мінухін Сергій Володимирович, Кучук Георгій Анатолійович
Формула / Реферат
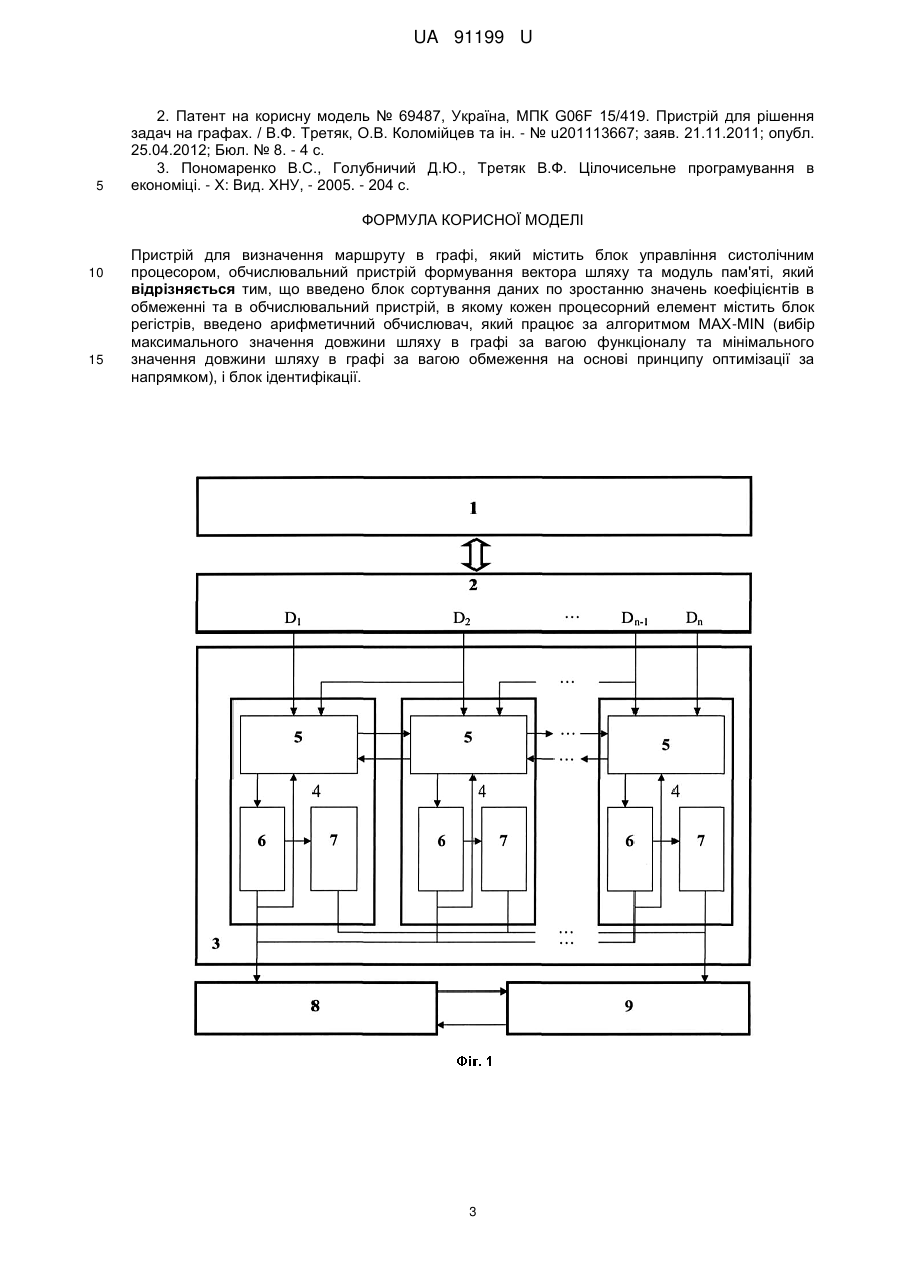
Пристрій для визначення маршруту в графі, який містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті, який відрізняється тим, що введено блок сортування даних по зростанню значень коефіцієнтів в обмеженні та в обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, введено арифметичний обчислювач, який працює за алгоритмом MAX-MIN (вибір максимального значення довжини шляху в графі за вагою функціоналу та мінімального значення довжини шляху в графі за вагою обмеження на основі принципу оптимізації за напрямком), і блок ідентифікації.
Текст
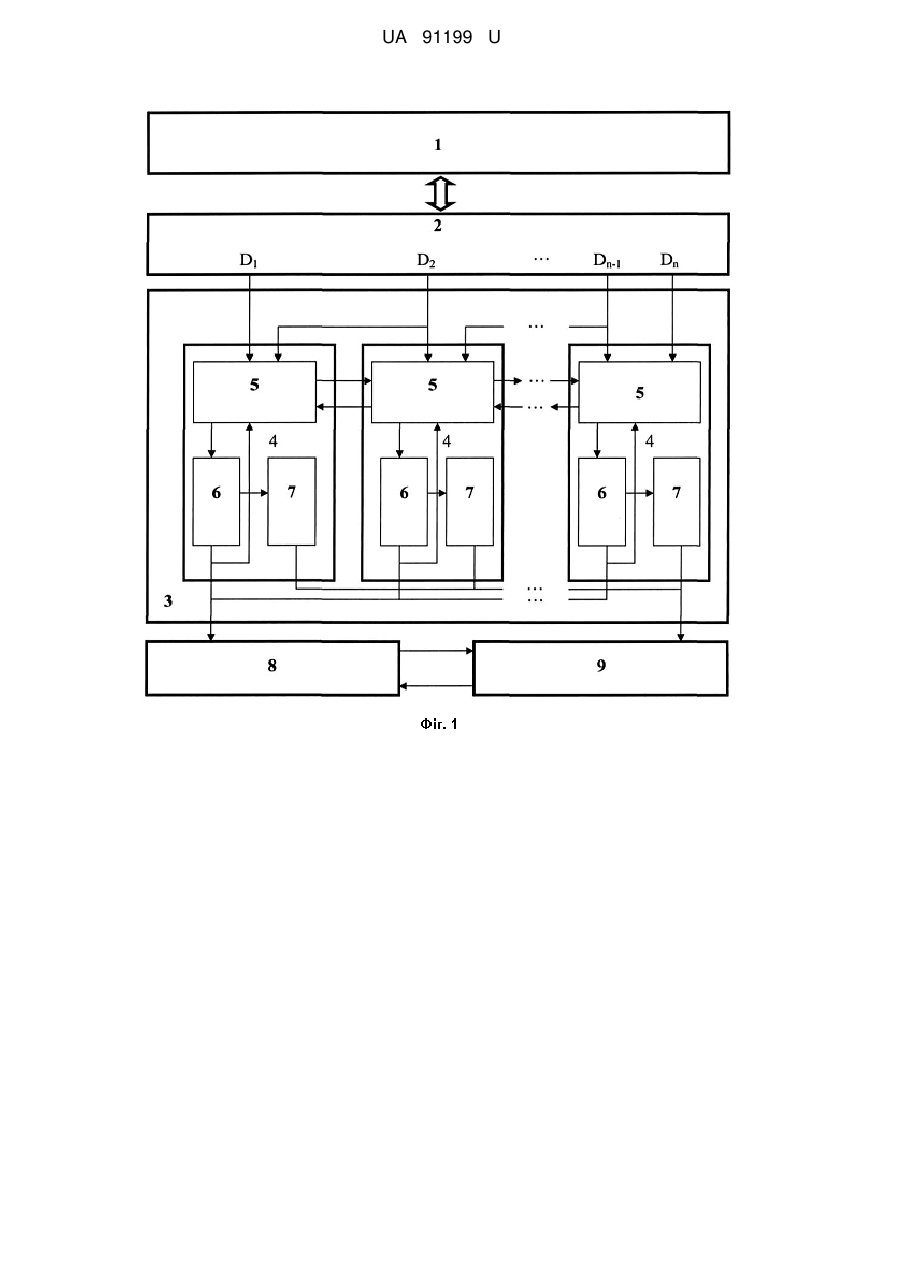
Реферат: Пристрій для визначення маршруту в графі містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті. Крім цього введено блок сортування даних по зростанню значень коефіцієнтів в обмеженні та в обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, введено арифметичний обчислювач, який працює за алгоритмом MAX-MIN (вибір максимального значення довжини шляху в графі за вагою функціоналу та мінімального значення довжини шляху в графі за вагою обмеження на основі принципу оптимізації за напрямком), і блок ідентифікації. UA 91199 U (12) UA 91199 U UA 91199 U 5 10 15 20 25 30 35 40 45 50 Запропонована корисна модель належить до галузі кібернетики і обчислювальної техніки та може бути використана при вирішенні задач комбінаторної оптимізації на графах. Відома "Архітектура паралельної обчислювальної структури (ПОС) систолічного типу" [1], яка містить блок управління систолічним процесором (БУСП), обчислювальний пристрій (ОП 1), у склад якого входять процесорні елементи (ПЕ1 … ПЕn), кожен з яких містить блок регістрів (БР), арифметичний обчислювач (АО) та блок ідентифікації (БІ), обчислювальний пристрій (ОП 2) та модуль пам'яті (МП). Недоліком відомого пристрою є те, що відносна похибка наближеного алгоритму для рішення задачі цілочисельного лінійного програмування з булевими змінними, за яким функціонує обчислювальний пристрій, складає 20 %. Найбільш близьким до запропонованого технічного рішення, вибраним як найближчий аналог, є "Пристрій для рішення задач на графах" [2], який містить блок сортування даних (БСД), блок управління систолічним процесором, обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, арифметичний обчислювач (АО 1), який працює за алгоритмом МАХ (вибір максимального значення довжини шляху в графі за вагою функціоналу на основі принципу оптимізації за напрямком), і блок ідентифікації, обчислювальний пристрій формування вектора шляху і модуль пам'яті. Недоліком найближчого аналога є те, що відносна похибка наближеного алгоритму для рішення задачі цілочисельного лінійного програмування з булевими змінними на основі рангового підходу складає 12 %. В основу корисної моделі поставлена задача створити пристрій для визначення маршруту в графі, який дозволить зменшити відносну похибку алгоритму до 5 %. Поставлена задача вирішується за рахунок того, що у пристрій, який містить блок сортування даних, блок управління систолічним процесором, обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, арифметичний обчислювач, який працює за алгоритмом МАХ (вибір максимального значення довжини шляху в графі за вагою функціоналу на основі принципу оптимізації за напрямком), і блок ідентифікації, обчислювальний пристрій формування вектора шляху і модуль пам'яті, замість блока сортування даних введено блок сортування даних по зростанню значень коефіцієнтів в обмеженні, та в обчислювальний пристрій в кожному процесорному елементі замість арифметичного обчислювача, який працює за алгоритмом МАХ (вибір максимального значення довжини шляху в графі за вагою функціоналу на основі принципу оптимізації за напрямком), введено арифметичний обчислювач, який працює за алгоритмом MAX-MIN (вибір максимального значення довжини шляху в графі за вагою функціоналу та мінімального значення довжини шляху в графі за вагою обмеження на основі принципу оптимізації за напрямком). Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у зменшенні відносної похибки алгоритму рішення задачі цілочисельного лінійного програмування з булевими змінними на основі рангового підходу до 5 %. На фіг. 1 представлена структурна схема запропонованого пристрою. На фіг. 2 представлено граф DΔ. Запропонований пристрій для визначення маршруту в графі містить блок сортування даних по зростанню значень коефіцієнтів в обмеженні 1, блок управління систолічним процесором 2, обчислювальний пристрій 3, в якому кожен процесорний елемент 4 містить блок регістрів 5, арифметичний обчислювач 6, який працює за алгоритмом MAX-MIN (вибір максимального значення довжини шляху в графі за вагою функціоналу та мінімального значення довжини шляху в графі за вагою обмеження на основі принципу оптимізації за напрямком) і блок ідентифікації 7, обчислювальний пристрій формування вектора шляху 8 і модуль пам'яті 9. Робота запропонованого пристрою для визначення маршруту в графі полягає у наступному (фіг. 1). Знаходиться вектор x , що доставляє максимум функції: f x n c jx j , (1) j 1 при виконанні умов: n a ij x j b1 , (2) j 1 1 UA 91199 U x j 0,1, i 1, j 1, n , (3) a1j 0, (4) c j 0. Для рішення задачі (1-4) вводиться процедура A 0 , що дозволяє на основі правила відсікань L w 5 r r 1 max r j, p ; sj sp cj L 3 : r r 1 min r j, p . sp sj j p r 1 nj r, nj p , , 10 (5) (6) вирішувати задачу (1-4). [3] Блок сортування даних по зростанню значень коефіцієнтів в обмеженні (фіг. 1) здійснює сортування коефіцієнтів при функціоналі та обмеженні: 1 2 3 n . 15 (7) Обчислювальний пристрій здійснює обчислення локальних екстремумів при заданому функціоналі та обмеженні, а також визначення (обчислення) номеру вершини, у якої локальний екстремум визначений за правилом (5). З множин mr виключаються, як не перспективні, шляхи r , які задовольняють умові: sp sj d c r p max d c r , sp sp c (8) j де p c p 1 c p 2 c n та для вершини j n вага j - дорівнює нулю; 20 25 30 35 40 dc r - довжина шляху від вершини s до вершини p рангу r по вагах функціоналу. sp Кожен процесорний елемент обчислювального пристрою виконує обчислення паралельно та здійснює обмін даними між сусідніми процесорними елементами після завершення обчислень. Блок регістрів кожного процесорного елементу зберігає і забезпечує мікрооперації передачі даних між регістрами блока регістрів сусідніх процесорних елементів. Арифметичний обчислювач обчислює локальні екстремуми на підставі даних, що надходять з блока регістрів, вибирає локальний екстремум за правилом (5) і пересилає його в обчислювальний пристрій формування вектора шляху для обчислення глобального екстремуму та формування вектора шляху. Блок ідентифікації визначає номер вершини (фіг. 2), у якій визначений локальний екстремум. Модуль пам'яті зберігає номери вершин локальних екстремумів на кожному рангу обчислень. Дані D1,D2 ,Dn надходять одночасно в кожну систолічну комірку, в яких здійснюється обчислення. Введення даних здійснюється під керуванням блока управління систолічним процесом із блока сортування даних по зростанню значень коефіцієнтів в обмеженні. Пам'ять блока управління систолічним процесором використовується як буфер між високошвидкісною спеціалізованою шиною і низькошвидкісною шиною електронної обчислювальної машини. За необхідністю дані в блоці управління систолічним процесором оновлюються, зчитуються й опрацьовуються систолічною матрицею. Джерела інформації: 1. Listrovoy S.V., Tretiyk V.F., Listrovay. A.S. Parallel algorithms of calculation process optimization for the boolean programming problems. // Engineering Simulation. - 1999. - Vol. 16. - PP. 569-579. 2 UA 91199 U 5 2. Патент на корисну модель № 69487, Україна, МПК G06F 15/419. Пристрій для рішення задач на графах. / В.Ф. Третяк, О.В. Коломійцев та ін. - № u201113667; заяв. 21.11.2011; опубл. 25.04.2012; Бюл. № 8. - 4 с. 3. Пономаренко B.C., Голубничий Д.Ю., Третяк В.Ф. Цілочисельне програмування в економіці. - X: Вид. ХНУ, - 2005. - 204 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Пристрій для визначення маршруту в графі, який містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті, який відрізняється тим, що введено блок сортування даних по зростанню значень коефіцієнтів в обмеженні та в обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, введено арифметичний обчислювач, який працює за алгоритмом MAX-MIN (вибір максимального значення довжини шляху в графі за вагою функціоналу та мінімального значення довжини шляху в графі за вагою обмеження на основі принципу оптимізації за напрямком), і блок ідентифікації. 3 UA 91199 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюTretiak Viacheslav Fedorovych, Minukhin Serhii Volodymyrovych, Androschuk Oleksandr Stepanovych, Kuchuk Heorhii Anatoliiovych, Maliuga Volodymyr Genadiiovych, Misiura Oleh Mykolaiovych, Nerubatskyi Volodymyr Omelianovych, Tkachov Andrii Mykhailovych
Автори російськоюТретяк Вячеслав Федорович, Минухин Сергей Владимирович, Андрощук Олександр Степанович, Кучук Георгий Анатольевич, Малюга Владимир Геннадиевич, Мисюра Олег Николаевич, Нерубацкий Владимир Емельянович, Ткачов Андрей Михайлович
МПК / Мітки
МПК: G06F 15/00, G06F 17/00
Мітки: визначення, пристрій, графі, маршруту
Код посилання
<a href="https://ua.patents.su/6-91199-pristrijj-dlya-viznachennya-marshrutu-v-grafi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення маршруту в графі</a>
Пристрій для динамічного кодування та захисту інформаційного ресурсу в інфокомунікаційних системах
Номер патенту: 91198
Опубліковано: 25.06.2014
Автори: Юдін Олександр Костянтинович, Сєвєрінов Олександр Васильович, Бойко Юлія Петрівна, Власов Андрій Володимирович, Третяк В'ячеслав Федорович, Рябуха Юрій Миколайович, Королюк Наталія Олександрівна, Баранник Володимир Вікторович, Голубничий Дмитро Юрійович, Ширяєв Андрій Володимирович
МПК: G06F 17/00, G06F 15/00
Мітки: системах, ресурсу, кодування, інфокомунікаційних, інформаційного, захисту, динамічного, пристрій
Формула / Реферат:
Пристрій для динамічного кодування та захисту інформаційного ресурсу в інфокомунікаційних системах, який містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті, який відрізняється тим, що введено блок сортування даних по убуванню значень коефіцієнтів в функціоналі та в обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, введено арифметичний обчислювач,...
Пристрій для рішення задачі цілочисельного лінійного програмування з булевими змінними на основі рангового підходу
Номер патенту: 88779
Опубліковано: 25.03.2014
Автори: Рябуха Юрій Миколайович, Таран Ігор Андрійович, Трублін Олександр Аркадійович, Дуденко Сергій Васильович, Третяк В'ячеслав Федорович, Косенко Віктор Павлович, Калачова Вероніка Валеріївна, Бусигін Юрій Генадійович, Алєксєєв Сергій Вікторович, Колмиков Максим Миколайович
МПК: G06F 15/00
Мітки: лінійного, рангового, пристрій, цілочисельного, змінними, рішення, задачі, підходу, булевими, основі, програмування
Формула / Реферат:
Пристрій для рішення задачі цілочисельного лінійного програмування з булевими змінними на основі рангового підходу, що містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті, який відрізняється тим, що введено блок сортування даних по спаданню значень відношень коефіцієнтів в фунціоналі до обмеження та обчислювальний пристрій, в якому кожен процесорний елемент містить блок...
Пристрій для обробки та захисту інформації в розподілених сховищах даних
Номер патенту: 90214
Опубліковано: 12.05.2014
Автори: Рябуха Юрій Миколайович, Власов Андрій Володимирович, Сєвєрінов Олександр Васильович, Баранник Володимир Вікторович, Сидоренко Микола Федорович, Третяк В'ячеслав Федорович, Королюк Наталія Олександрівна, Голубничий Дмитро Юрійович, Остроумов Борис Володимирович, Ширяєв Андрій Володимирович
МПК: G06F 15/00
Мітки: інформації, захисту, обробки, пристрій, розподілених, сховищах, даних
Формула / Реферат:
Пристрій для обробки та захисту інформації в розподілених сховищах даних, який містить блок управління систолічним процесором, обчислювальний пристрій формування вектора шляху та модуль пам'яті, який відрізняється тим, що введено блок сортування даних по зростанню значень коефіцієнтів в обмеженні та в обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, введено арифметичний обчислювач, який працює за алгоритмом...
Пристрій для рішення задач на графах
Номер патенту: 89600
Опубліковано: 25.04.2014
Автори: Щепанський Павло Володимирович, Хмелевський Сергій Іванович, Малюга Володимир Геннадійович, Опенько Павло Вікторович, Місюра Олег Миколайович, Гогонянц Спартак Юрійович, Тюрін Віталій Вікторович, Звєрєв Олексій Олексійович, Дранник Павло Анатолійович, Третяк В'ячеслав Федорович
МПК: G06F 15/00
Мітки: рішення, задач, пристрій, графах
Формула / Реферат:
Пристрій для рішення задач на графах, який містить блок управління систолічним процесором, обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, арифметичний обчислювач, який працює за алгоритмом МАХ (вибір максимального значення довжини шляху в графі за вагою функціоналу на основі принципу оптимізації за напрямком) і блок ідентифікації, обчислювальний пристрій формування вектора шляху і модуль пам'яті, який...
Пристрій для розподілу та кодування інформаційного ресурсу в мультисервісних мережах
Номер патенту: 91075
Опубліковано: 25.06.2014
Автори: Третяк В'ячеслав Федорович, Власов Андрій Володимирович, Ширяєв Андрій Володимирович, Голубничий Дмитро Юрійович, Красноруцький Андрій Олександрович, Королюк Наталія Олександрівна, Романенко Ігор Володимирович, Рябуха Юрій Миколайович, Баранник Володимир Вікторович, Лазебнік Сергій Володимирович
МПК: G06F 15/00
Мітки: інформаційного, розподілу, мультисервісних, пристрій, ресурсу, кодування, мережах
Формула / Реферат:
Пристрій для розподілу та кодування інформаційного ресурсу в мультисервісних мережах, який містить блок сортування даних, блок управління систолічним процесором, обчислювальний пристрій, в якому кожен процесорний елемент містить блок регістрів, арифметичний обчислювач, який працює за алгоритмом МАХ (вибір максимального значення довжини шляху в графі за вагою функціоналу на основі принципу оптимізації за напрямком) і блок ідентифікації,...
Попередній патент: Пристрій для динамічного кодування та захисту інформаційного ресурсу в інфокомунікаційних системах
Наступний патент: Пристрій для рішення задачі планування паралельного розподілу задач в grid-системах
Випадковий патент: Літальний апарат-парастат омельченка