
Формула / Реферат
1. Судно для використання при високих швидкостях і сильних хвилюваннях, яке має єдиний довгий і вузький корпус з вузькою шириною і більш або менш вертикальним носом (3), в якому передня половина корпусу має більш або менш вертикальні борти (19), мінімальне розширення носових секцій і збільшення до носа (3) осадки по його діаметральній лінії (5), об'єднане з більш або менш подібним збільшенням надводного борта, і в якому корма (10) корпусу має плоске або рівне V-подібне днище з одним або більше гребними гвинтами (8) і/або водометами (14) як рушійними засобами, яке відрізняється тим, що ніс (3) має радіус (R) кривизни щонайменше 1 % від ширини.
2. Судно за п. 1, в якому радіус (R) кривизни становить менше 4 % від ширини.
3. Судно за п. 1 або 2, в якому борти (19) біля носа (3) утворюють гострий кут (![]() ), менший ніж 40 градусів.
), менший ніж 40 градусів.
4. Судно за пп. 1, 2 або 3, в якому у корми (10) корпусу перед стернами і рушійними засобами біля кожного борта (19) встановлений щонайменше один більш або менш вертикальний постійний стабілізатор (6; 12).
5. Судно за п. 1, в якому постійні стабілізатори (6; 12) утворюють з носом кут (![]() ), що становить 1-3 градуси з діаметральною лінією (5).
), що становить 1-3 градуси з діаметральною лінією (5).
6. Судно за одним з попередніх пунктів, в якому корпус на кормі (10) корпусу має засоби (7; 14) створення регульованої сили для створення висхідної і/або низхідної сили.
7. Судно за п. 6, в якому засоби створення регульованої сили утворені соплами (14) водометів.
8. Судно за п. 6, в якому у корми (10) корпусу перед стерном і рушійними засобами біля кожного борта (19) встановлений щонайменше один більш або менш вертикальний постійний стабілізатор (6; 12) і засоби створення регульованої сили містять щонайменше один більш або менш горизонтальний стабілізатор (7), прикріплений до постійних стабілізаторів біля їх перпендикуляра максимальної глибини до діаметральної лінії судна, і цей горизонтальний(і) стабілізатор(и) здатний(і) обертатися навколо поздовжньої осі горизонтального(них) стабілізатора(ів).
Текст
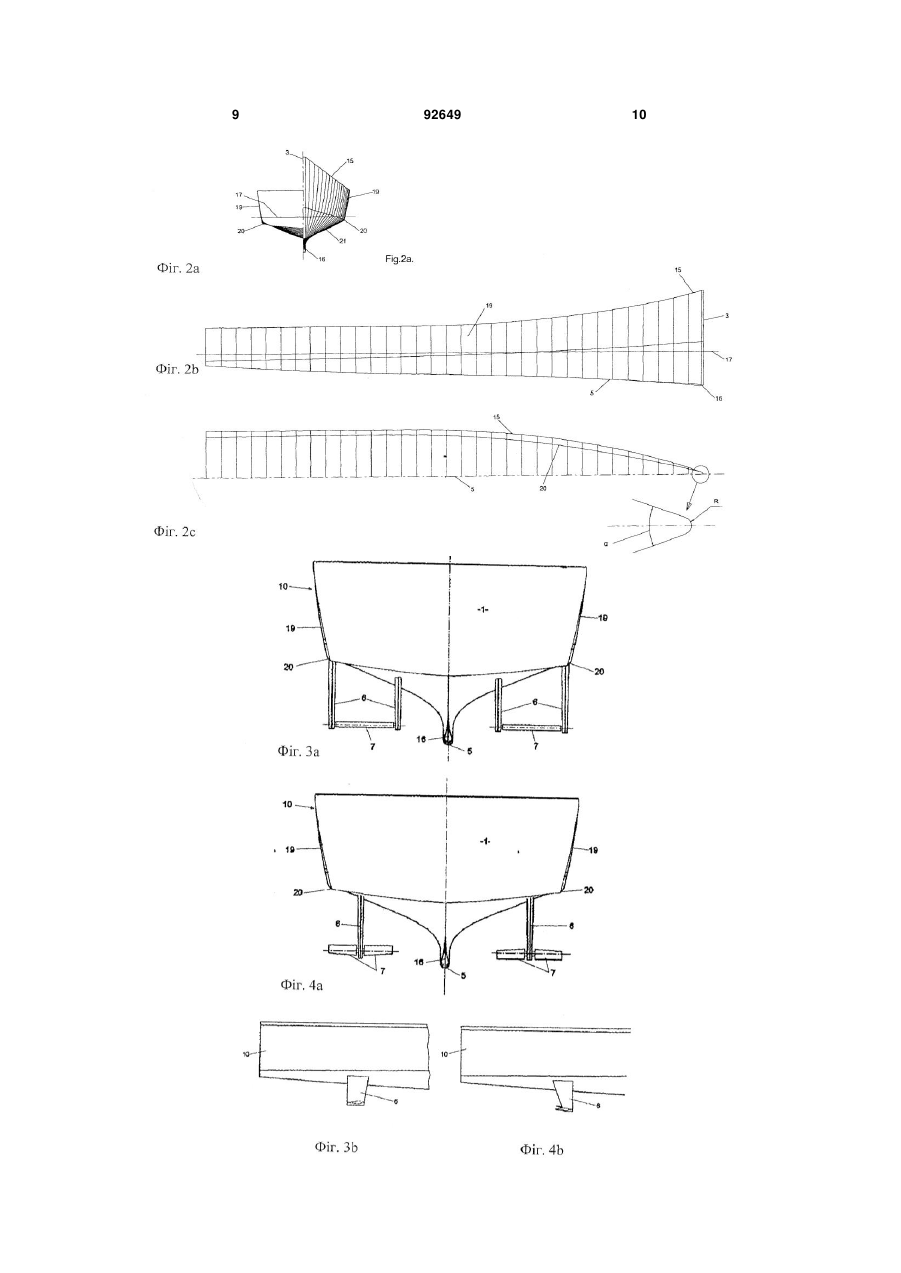
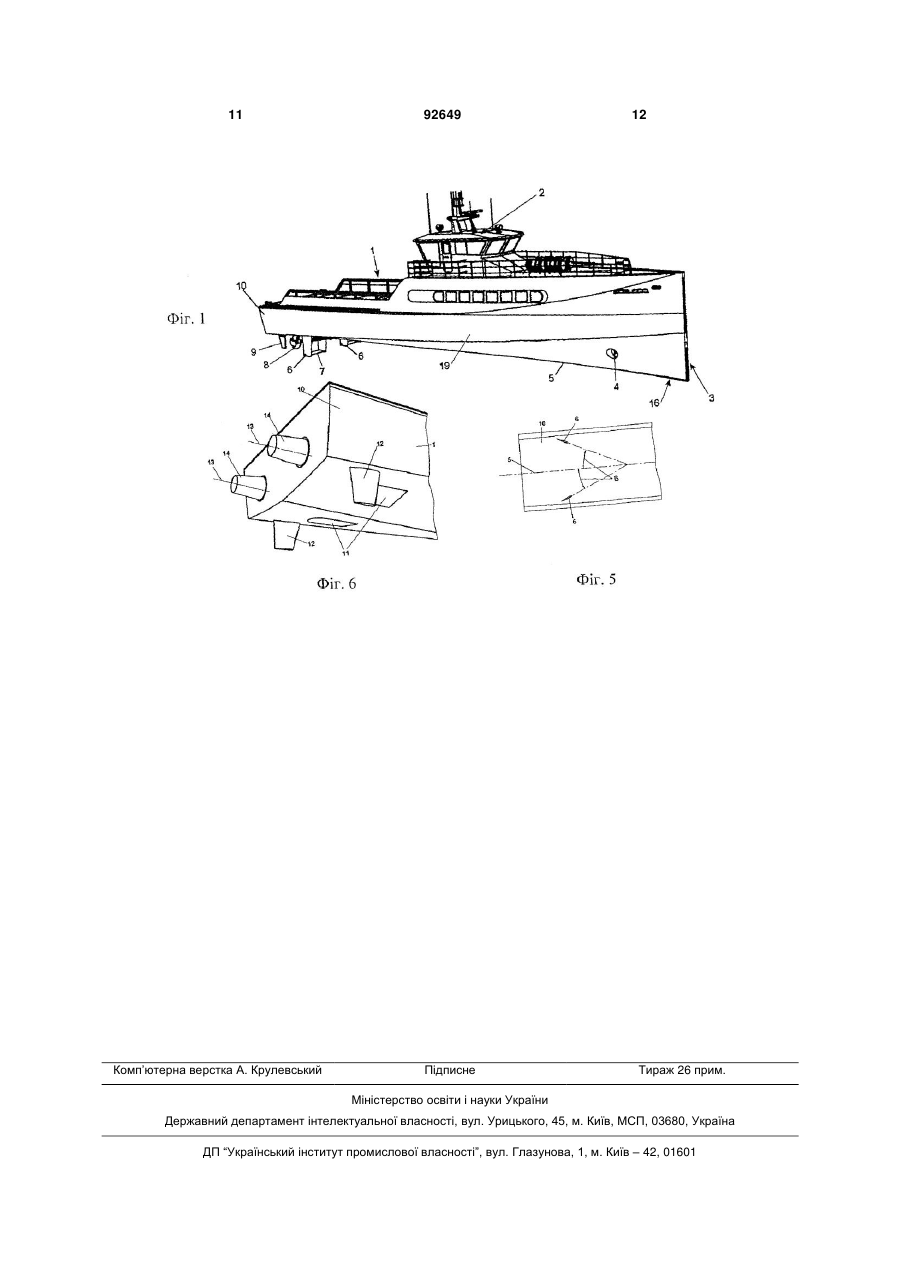
1. Судно для використання при високих швидкостях і сильних хвилюваннях, яке має єдиний довгий і вузький корпус з вузькою шириною і більш або менш вертикальним носом (3), в якому передня половина корпусу має більш або менш вертикальні борти (19), мінімальне розширення носових секцій і збільшення до носа (3) осадки по його діаметральній лінії (5), об'єднане з більш або менш подібним збільшенням надводного борта, і в якому корма (10) корпусу має плоске або рівне V-подібне днище з одним або більше гребними гвинтами (8) і/або водометами (14) як рушійними засобами, яке відрізняється тим, що ніс (3) має радіус (R) кривизни щонайменше 1 % від ширини. 2. Судно за п. 1, в якому радіус (R) кривизни становить менше 4 % від ширини. C2 2 (19) 1 3 находу судно відповідає п. 2 формули винаходу. Таким чином уникають надмірного опору точки гальмування потоку та утворення бризок. Відповідно до варіанту здійснення винаходу судно відповідає п. 3 формули винаходу. Таким чином легко одержати мінімальне розширення поперечного перерізу носа так, щоб зміщений об'єм при хвилюванні збільшувався тільки більш або менш лінійно з осадкою, що призводить до кращого режиму роботи корабля при хвилюванні. Відповідно до варіанту здійснення винаходу судно відповідає п. 4 формули винаходу. Таким чином стабілізатори дають поліпшену стійкість курсу судна, незалежну від будь-яких керуючих систем. Місцерозташування стабілізаторів попереду рушійних засобів і стерна(ен) запобігає виходу з води стабілізаторів в ситуаціях, в яких через хвилі, що набігають на корму корабля, стерна втрачають зчеплення з водою внаслідок такого виходу з води, таким чином поліпшуючи стійкість курсу при несприятливих умовах. Відповідно до варіанту здійснення винаходу судно відповідає п. 5 формули винаходу. За допомогою того, що стабілізатори знаходяться під невеликим кутом, вони знаходяться під навантаженням, і стають негайно активними при малих кутових амплітудах рискання, що поліпшує їх позитивний вплив. Відповідно до варіанту здійснення винаходу судно відповідає п. 6 формули винаходу. Таким чином судно може бути приведене в положення диференту, що залежить від швидкості, незалежно від навантаження або розподілу маси на судні, таким чином зменшуючи лобовий опір і поліпшуючи ефективність тяги. Відповідно до варіанту здійснення винаходу судно відповідає п. 7 формули винаходу. За допомогою використання направлення потоку із сопел для керування судном і для створення регульованої висхідної або низхідної сили можлива компактна конструкція. Відповідно до варіанту здійснення винаходу судно відповідає п. 8 формули винаходу. Об'єднання стаціонарних стабілізаторів з горизонтальним стабілізатором для створення висхідної або низхідної сили робить можливим компактну конструкцію, за допомогою чого через глибини розміщення горизонтального стабілізатора запобігають його виходу з води. Винахід буде пояснений більш детально нижче з посиланням на декілька прикладів варіантів здійснення за допомогою креслень, на яких: Фіг. 1 зображає вигляд в перспективі судна згідно з першим варіантом здійснення винаходу, в якому рушійні засоби містять гребні гвинти, Фіг. 2 зображає креслення корпусу судна згідно з винаходом, в якому Фіг. 2а зображає різні поперечні перерізи, Фіг. 2b зображає вигляд збоку і Фіг. 2с зображає вигляд знизу, Фіг. 3 зображає схематично корму судна відповідно до Фіг. 1, вигляд ззаду і вигляд збоку, Фіг. 4 зображає схематично корму судна відповідно до додаткового варіанту здійснення винаходу, вигляд ззаду і вигляд збоку, Фіг. 5 зображає схематично вигляд знизу кор 92649 4 ми судна, попередніх варіантів здійснення і особливо - кут сходження вертикальних стабілізаторів, і Фіг. 6 зображає вигляд в перспективі корми судна згідно з додатковим варіантом здійснення винаходу, в якому рушійні засоби містять водомети. Фіг. 1 зображає судно 1, яке розроблене відповідно до креслення корпусу згідно з Фіг. 2. Судно 1 розроблене для високих швидкостей і має єдиний довгий і вузький корпус з бортами 19, в якому довжина корпусу щонайменше в п'ять разів більша ширини і для довших суден більша ширини в цілих сім-вісім разів. У коротших суднах ширина відносно більша, оскільки корпус повинен містити рушійні засоби, і велика ширина забезпечує те, що він залишиться достатньо стабільним. Судно 1 має один або більше гребних гвинтів 8 і одне або більшу кількість стерен 9. Для маневрування біля носа 3 є носовий підрулюючий пристрій 4. Розташування пульта керування відоме, наприклад, в стерновій рубці 2. Як може бутивидно на Фіг. 2, корпус судна 1 має особливу конструкцію, точніше конструкція така, що зменшення сил Фруда-Крилова, особливо в носовій частині корабля, досягнуте за допомогою мінімізації зміни в моментальному зануреному об'ємі корпусу, в той час як воно здійснює великі відносні переміщення відносно рівня води через хвилі або переміщення суден. Це призводить до конструкції із застосуванням вертикальних бортів 19 наскільки це допустимо. Додаткова осадка конструкції повинна зменшити зміну ширини ватерлінії в секціях, зокрема, в носовій частині судна, в той час як воно здійснює згадані великі відносні переміщення. Це припускає, що має місце мінімальне розширення бортів в носовій секції, і ніс 3 має більш або менш вертикальну лінію або продовжений менше, ніж на 5 градусів вперед або назад. За допомогою здійснення цього, зміна приєднаної маси секцій мінімізована, і за допомогою цього також мінімізовані зміни гідродинамічної піднімальної сили в носовій частині корабля. За допомогою збільшення надводного борта і приведення лінії палуби 15 вище до носа 3 в носовій частині судна забезпечений достатній запас плавучості. Значення збільшеного зсуву в носовій частині судна, зображене на Фіг. 2 як лінія палуби 15, залежить від розміру судна, швидкості і режиму хвилювання, що має місце. Діаметральна лінія 5, яка нахиляється вниз до носової частини корабля, відвертає носові секції від виходу з води і повернення назад у воду, в той час як судно виконує великі відносні переміщення. Діаметральна лінія 5 в своїй найнижчій частині біля носа 3 знаходиться біля точки 16, яка означає максимальне поглиблення судна відносно ватерлінії 17. Значення негативного кута нахилу в основі 21 залежить від розміру судна, швидкості і режиму хвилювання, що має місце. Кут кілюватості секцій від носа до корми строго обчислений, щоб мінімізувати виштовхувальне зусилля, і все ж підтримати достатню гідродинамічну піднімальну силу з мінімальним опором. Одержана в результаті форма корпусу така, 5 що корпус є довгим і вузьким, немає розширення в носових секціях, і борти 19 в носових секціях є майже вертикальними. Біля носа 3 борти 19 утворюють кут , видимий в горизонтальній площині, який менше 40 градусів. Кривизна у напрямку вперед і кут нахилу нижньої діаметральної лінії вперед збільшені і краї ватерліній 20 закруглені. Щоб зменшити змочену поверхню, ніс 3 закруглений з радіусом R щонайменше 0,1м. Залежний від ширини судна, радіус може бути щонайменше 1% від ширини. Додаткова перевага цього радіуса R полягає в тому, що таким чином уникають вихору, виникаючого вздовж бортів 19 судна. Це виникнення вихору могло б статися в цій конструкції при малих кутових амплітудах рискання, коли ніс дуже гострий, як звичайно відбувається з швидкохідними суднами. Виникнення вихору треба уникнути, оскільки він міг би призвести до нестійкості курсу. Щоб запобігти цьому, закруглений ніс 3 створює дуже великий опір точки гальмування потоку і/або утворює дуже багато бризок, радіус R становить менше 4% від ширини. В умовах застосування цієї нової форми корпусу повинні бути використані додаткові заходи для того, щоб підтримати адекватне рискання або утримати стабільний курс і запобігти небажаним проблемам з керуванням, зокрема при попутних або кормових хвилях. Сам корпус виробляє хитаючі сили і моменти, що порушують стійкість і відхиляють від курсу, які можуть призвести до цієї нестабільності. Введенням нерухомих вертикальних стабілізаторів або скегів 6 в кормовій частині корпусу цій нестабільності запобігають. Стабілізатори 6 переважно мають крилоподібну форму перерізу і мають розумні співвідношення параметрів, щоб створити адекватну піднімальну силу, щоб протидіяти впливу дестабілізації при рисканні і хитанні корпусу. Вони розроблені, щоб оптимізувати стійкість при рисканні, зокрема за рахунок мінімального збільшення опору. Стабілізатори 6 розташовані на віддаленні від діаметральної лінії 5 і переважно біля бортів 19 так, щоб вони були на віддаленні від зони збурень у воді, яка є результатом максимального відхилення 16 носа 3, який знаходиться у воді набагато глибше, ніж корма судна 10. Переважно вони знаходяться перед стернами 9 і рушійними засобами так, щоб вони втримували зчеплення з поточною водою, навіть коли стерна 9 виходять з води через набігаючі хвилі від корми судна. Момент стабілізації корпусу по диференту є відносно маленьким, якщо порівнювати з подібним судном. При меншій протяжності це також правомірно для стабілізуючої сили у вертикальних коливаннях. Вертикальні коливальні переміщення, але особливо переміщення по диференту, можуть бути дуже ефективно зменшені застосуванням одного або більше активізованих горизонтальних стабілізаторів 7 на кормі судна 10. Ці стабілізатори 7 створюють позитивну або негативну піднімальну силу і можуть бути відрегульовані вручну, якщо використані тільки для регулювання диференту, або керовані (на борту) датчиками і алгоритмами керування. У варіанті здійснення Фіг. 1 є два горизонтальних стабілізатори 7, які можуть працювати 92649 6 разом і таким чином прикладати зусилля на корму судна 10, які протидіють вертикальним коливанням і/або диференту судна 1 і можуть привести його в його оптимальний режим. В іншому варіанті здійснення ці два горизонтальних стабілізатори 7 можуть бути керовані таким способом, при якому вони створюють протилежно діючі висхідні і низхідні сили, і так створюють круглий момент в поздовжньому напрямку на судні 1, який протидіє обертанню так, щоб при належному керуванні стабільність могла бути поліпшена. Занурені у воду горизонтальні стабілізатори 7, змочені з обох сторін, розраховані на створення піднімальної сили з боку високого тиску, і з боку зниженого тиску, звичайного для підводних крил, і вони переважно розміщені достатньо глибоко нижче рівня води, щоб запобігти вентилюванню або кавітації з боку зниженого тиску вздовж стабілізаторів 7. Зокрема вони можуть бути використані для активного керування кутом диференту в спокійній воді, який залежить від швидкості судна 1, щоб привести до оптимальної стійкості судна, для активного керування диферентним і вертикальним переміщенням за допомогою автопілоту і алгоритмом керування і також за допомогою застосування диференціального стернового керування для лівих і правих горизонтальних стабілізаторів можна керувати переміщеннями при бортовій хитавиці. Фіг. 3а зображає судно 1 на Фіг. 1 ззаду з вертикальними стабілізаторами 6, де з кожної сторони діаметральної лінії 5 розташовані два стабілізатори 6 і де між цими двома стабілізаторами встановлений один горизонтальний стабілізатор 7. Фіг. 3b зображає той самий вигляд збоку. Для полегшення сприйняття гребні гвинти 8 і стерна 9 не показані. Як можна бачити на Фіг. 1, гребні гвинти 8 і стерна 9 розташовані позаду стабілізаторів 6 та 7. Очевидно, що для приведення в рух судна 1 можливі різні конструкції, такі як три гребних гвинти 8, як показано на Фіг. 1, два гребних гвинти, два гребних гвинти з одним водометом, один гребний гвинт з двома водометами і також двома або більше водометами, як показано на Фіг. 6 (обговорене пізніше). Фіг. 4а та 4b зображають подібні вигляди додаткового варіанту здійснення вертикальних стабілізаторів 6 і горизонтальних стабілізаторів 7. В цьому варіанті здійснення горизонтальний стабілізатор 7 продовжується від обох сторін вертикального стабілізатора 6. Вертикальний стабілізатор 6 розташований трохи далі від борта 19 так, щоб горизонтальний стабілізатор 7 не виступав по ширині судна 1. Ці два горизонтальних стабілізатори 7, що проходять до двох сторін вертикального стабілізатора 6, мають спільну вісь і з'єднані з єдиним приводом так, щоб вони переміщувалися разом. У варіанті здійснення, зображеному на Фіг. 4, горизонтальні стабілізатори 7 на правом борті створюють в судні 1, що переміщується вперед, силу, направлену вгору, і горизонтальні стабілізатори 7 на лівому борті створюють силу, направлену вниз. Ці дві сили утворюють на судні 1 крутний момент, направлений проти годинникової стрілки, який може бути використаний для протидії силам, які виникають у результаті, наприклад, хитавиці. 7 Передня кромка вертикальних стабілізаторів 6 зображена більш-менш вертикальною, оскільки в цьому випадку потік води навколо лопаті є найбільш ефективним для створення стабілізуючої сили. Очевидно, що будуть створені такі самі умови, якщо вертикальні стабілізатори 6 будуть, наприклад, вертикальними в площині нижньої сторони судна 1, тоді як передня кромка стабілізатора буде більш або менш перпендикулярна потоку води відносно стабілізатора 6. Передня кромка вертикальних стабілізаторів 6 може також бути трохи зігнена назад так, щоб матеріал, обгорнений навколо передньої кромки, направлявся до кінця стабілізатора і звільнявся від стабілізатора. У зображених варіантах здійснення вертикальні стабілізатори 6 об'єднані з горизонтальними стабілізаторами 7. Очевидно, що для належного функціонування вертикальних лопатей 6 цього не потрібно. Фіг. 5 показує, що вертикальні стабілізатори 6 утворюють невеликий кут з діаметральноюлінією 5 так, щоб коли судно 1 переміщується по прямій лінії вперед, мають місце стійкі умови потоку навколо стабілізатора 6 по довжині стабілізатора 6, видимій в напрямку потоку, і можливо негайно одержати коректуючу силу, якщо хвилі набігають на корму судна 10 і змінюють напрямок потоку до стабілізатора 6 і умови потоку навколо стабілізатора 6. Значення кута залежить від локальних умов потоку і, отже, від форми нижньої сторони судна 1. На практиці значення куга може бути між 1 та 3 градусами або приблизно 1,5 градуси. У зображених варіантах здійснення лопаті горизонтальних стабілізаторів 7 мають вісь горизонтального обертання, таким чином забезпечуючи умови подібні до аерації вздовж стабілізатора 7. Залежно від певних умов, це не завжди є суттєвим. Наприклад, щоб зменшити гідродинамічний опір при нормальних умовах переважно можна було б мати горизонтальний стабілізатор 7, помітно перпендикулярний до довжини, паралельної нижній стороні судна 1. В ситуаціях, де немає необхідності протидіяти обертанню судна 1, досить мати горизонтальний стабілізатор 7 з єдиним приводом, який може знаходитися по повній ширині судна 1 і який використовується тільки для того, щоб забезпечити належний диферент судна 1. Для стабільності цей горизонтальний стабілізатор 92649 8 7 може бути підтриманий в центрі. Фіг. 6 зображає корму судна 10 додаткового варіанту здійснення, для якого корпус розроблений подібно до зображеного на Фіг. 1. Рушійні засоби судна 1 в цьому варіанті здійснення являють собою водомети. Для стійкості курсу є вертикальні стабілізатори 12, ці вертикальні стабілізатори більш або менш такі самі, як і обговорені раніше вертикальні стабілізатори 6 без доданих до них горизонтальних стабілізаторів 7. На нижній стороні судна є водоприймальні пристрої 11 для впускання води, яка тече до водометів, і води, що витікає з сопел 14 в напрямку діаметральної лінії 13. Для регулювання діаметральні лінії 13 можуть бути переміщені відомим способом у горизонтальній площині. Для створення висхідних і низхідних сил на кормі судна 10 діаметральні лінії 13 можуть бути переміщені подібним способом у вертикальній площині по горизонтальній осі. Контрольний пристрій направлення діаметральних ліній 13 розташований так само, як і контрольний пристрій горизонтальних стабілізаторів 7, і переважно з'єднаний з автопілотом для активного контролю, що має алгоритм контролю, і датчиками, що застосовуються для визначення положення і переміщення судна. Посилальні позиції 1 судно (корпус судна) 2 стернова рубка 3 ніс 4 носовий підрулюючий пристрій 5, 13 діаметральна лінія 6 вертикальний стабілізатор або скег 7 горизонтальні стабілізатори 8 гребний гвинт 9 стерно 10 корма 11 водоприймальні пристрої 12 вертикальні стабілізатори 14 сопла 15 палуба 16 максимальне відхилення носа 17 ватерлінія 19 борт 20 краї ватерлінії 21 основа 9 92649 10 11 Комп’ютерна верстка А. Крулевський 92649 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюShip
Автори англійськоюKeuning Jan Alexander
Назва патенту російськоюСудно
Автори російськоюКенинг Ян Александер
МПК / Мітки
МПК: B63B 1/06, B63B 1/04, B63B 1/08
Мітки: судно
Код посилання
<a href="https://ua.patents.su/6-92649-sudno.html" target="_blank" rel="follow" title="База патентів України">Судно</a>
Судно підкладне
Номер патенту: 1298
Опубліковано: 17.06.2002
Автори: Слуцький Ігор Павлович, Аркатов Павло Павлович
МПК: A61G 9/00
Формула / Реферат:
Судно підкладне, яке складається з корпусу з отвором, яке відрізняється тим, що корпус виконаний в вигляді совка та обладнаний кришкою для закривання, а як матеріал для його виготовлення використовують суміш поліпропілену та поліетилену низького тиску.
Двокорпусне судно “окран”
Номер патенту: 56326
Опубліковано: 15.05.2003
Автор: Калошин Олексій Федорович
МПК: B63B 39/00, B63B 43/00, B63B 1/14
Мітки: окран, двокорпусне, судно
Формула / Реферат:
Двокорпусне судно, корпуси якого з'єднані між собою, і кожний корпус має вітрило, яке відрізняється тим, що корпуси з'єднані шарнірно, з можливістю повороту відносно подовжньої осі, паралельної основним і діаметральним площинам корпусів.
Судно підкладне
Номер патенту: 1297
Опубліковано: 17.06.2002
Автори: Слуцький Ігор Павлович, Аркатов Павло Павлович
МПК: A61G 9/00
Формула / Реферат:
Судно підкладне, яке складається з корпусу із отвором і зливним патрубком, яке відрізняється тим, що корпус виконаний розбірним і складається із суцільнолитих верхнього та нижнього півкорпусів із півпатрубками, судно обладнане кришкою для закривання, а як матеріал для його виготовлення використовують суміш поліпропілену та поліетилену низького тиску.
Судно підкладне
Номер патенту: 6087
Опубліковано: 15.04.2005
Автор: Косой Юхим Ілліч
МПК: A61G 9/00
Формула / Реферат:
1. Судно підкладне, що містить корпус з ємністю і з верхньою опорною поверхнею, призначеною для контакту з тазом хворої людини, яке відрізняється тим, що додатково містить розташований у його передній частині карман, утворений завуженою ділянкою згаданої ємності корпусу і знімною накладкою, ємність корпусу виконана відкритою зверху по всій площі, а верхня опорна поверхня розміщена ззовні контуру ємності і має відігнутий назовні і униз...
Судно
Номер патенту: 70865
Опубліковано: 15.10.2004
Автори: Попов Андрій Кірович, Жуков Юрій Даниїлович, Снігур Анатолій Кирилович, Галь Анатолій Феодосійович
МПК: B63B 1/40
Мітки: судно
Формула / Реферат:
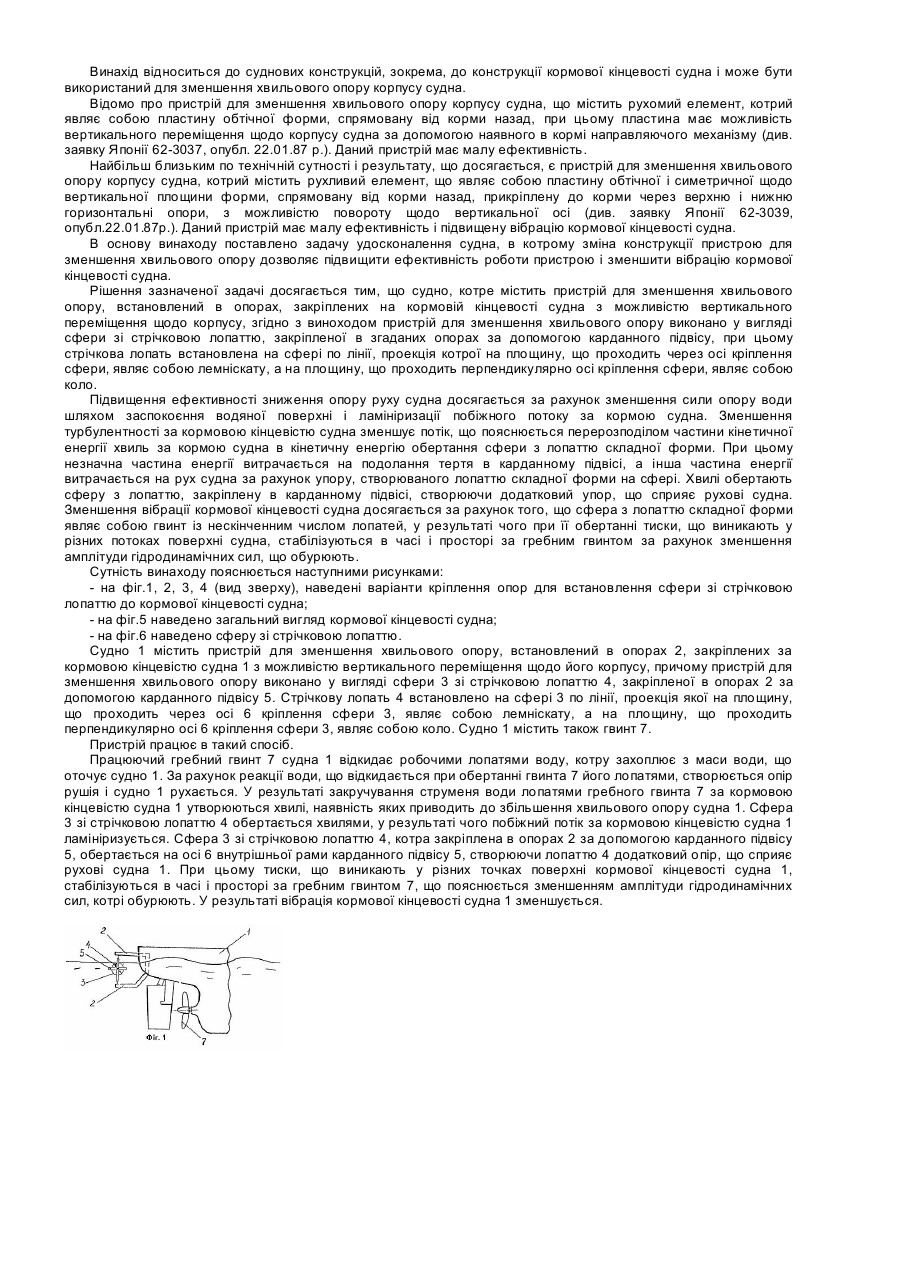
Судно, що містить пристрій для зменшення хвильового опору, що встановлений на опорах, закріплених на кормовій кінцевості судна з можливістю вертикального переміщення відносно корпусу, яке відрізняється тим, що згаданий пристрій виконано у вигляді сфери зі стрічковою лопаттю, закріпленої у згаданих опорах за допомогою карданного підвісу, при цьому стрічкова лопать встановлена на сфері по лінії, проекція котрої на площину, що проходить через...
Попередній патент: Двотактний симетричний підсилювач струму
Наступний патент: Пристрій для одержання кускового фракційного матеріалу з розплаву
Випадковий патент: Спосіб регіональної аналгезії