Спосіб вимірювання швидкості снаряда або подібного об’єкта
Формула / Реферат
1. Спосіб вимірювання швидкості снаряда (2) або подібного об'єкта в стволі гармати або пусковій трубі (1) або в дуловому гальмі (3), при цьому ствол гармати (1) або дулове гальмо (3) використовуються як хвилевід, який відрізняється тим, що хвилевід працює в режимі нижче граничної частоти відповідного хвилеводу електромагнітних коливань (ТЕ; ТМ).
2. Спосіб за п. 1, який відрізняється тим, що поточна швидкість снаряда (Vt) безупинно вимірюється і реєструється в блоці обробки.
3. Спосіб за п. 1 або 2, який відрізняється тим, що характер зміни швидкості снаряда в часі (t) визначається у хвилеводі.
4. Спосіб за одним із пп. 1-3, який відрізняється тим, що швидкість (V0) снаряда (2) може бути визначена в процесі його руху у хвилеводі і перед виходом його із хвилеводу.
5. Спосіб за одним із пп. 1-4, який відрізняється тим, що як момент обробки може бути вибраний будь-який момент часу, при якому снаряд перебуває точно в місці установки ланки зв'язку приймального пристрою, при цьому вимірюваний сигнал дорівнює або нулю, або має іншу характерну величину, завдяки чому може бути обмірювана швидкість снаряда (V0).
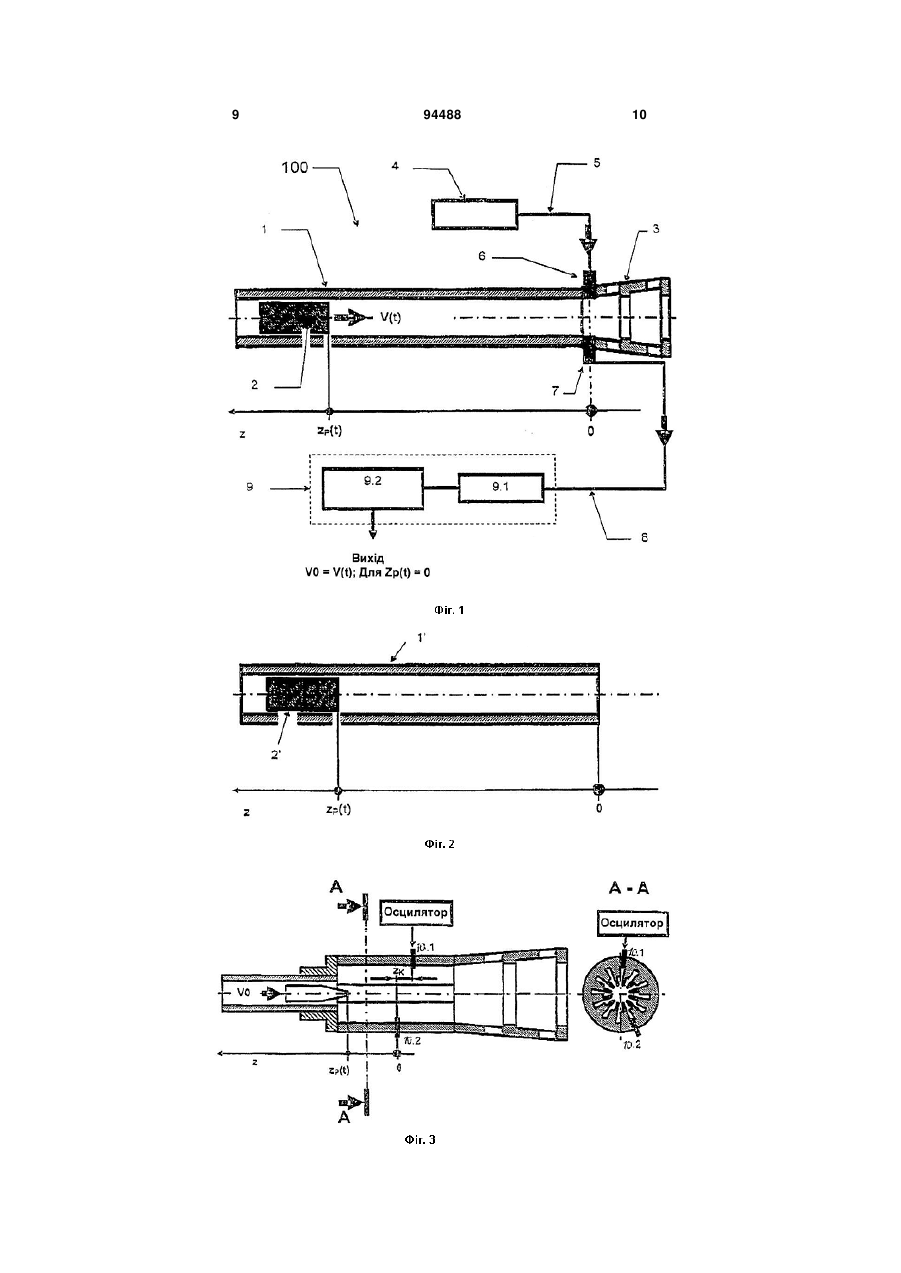
6. Вимірювальний пристрій (100) для здійснення способу по одному із пп. 1-5, що включає ствол гармати або пускову трубу (1), дулове гальмо (3), або подібний йому пристрій, генератор сигналів (4), який через сигнальну лінію (5) електрично з'єднаний щонайменше з однією ланкою зв'язку (6, 10.1, 11.1) для збудження спрацьовування ствола гармати або пускової труби (1), лінію приймального пристрою (8) для передачі обмірюваних на щонайменше одній ланці зв'язку приймального пристрою (7,10.2,11.2) сигналів на блок обробки сигналів (9).
7. Вимірювальний пристрій за п. 6, який відрізняється тим, що генератор сигналів (4) генерує несучу частоту в режимі безперервного випромінювання (режим CW).
8. Вимірювальний пристрій за п. 6, який відрізняється тим, що генератор сигналів (4) генерує модульований сигнал.
9. Вимірювальний пристрій за одним із пп. 6-8, який відрізняється тим, що генератором сигналів (4) є осцилятор.
Текст
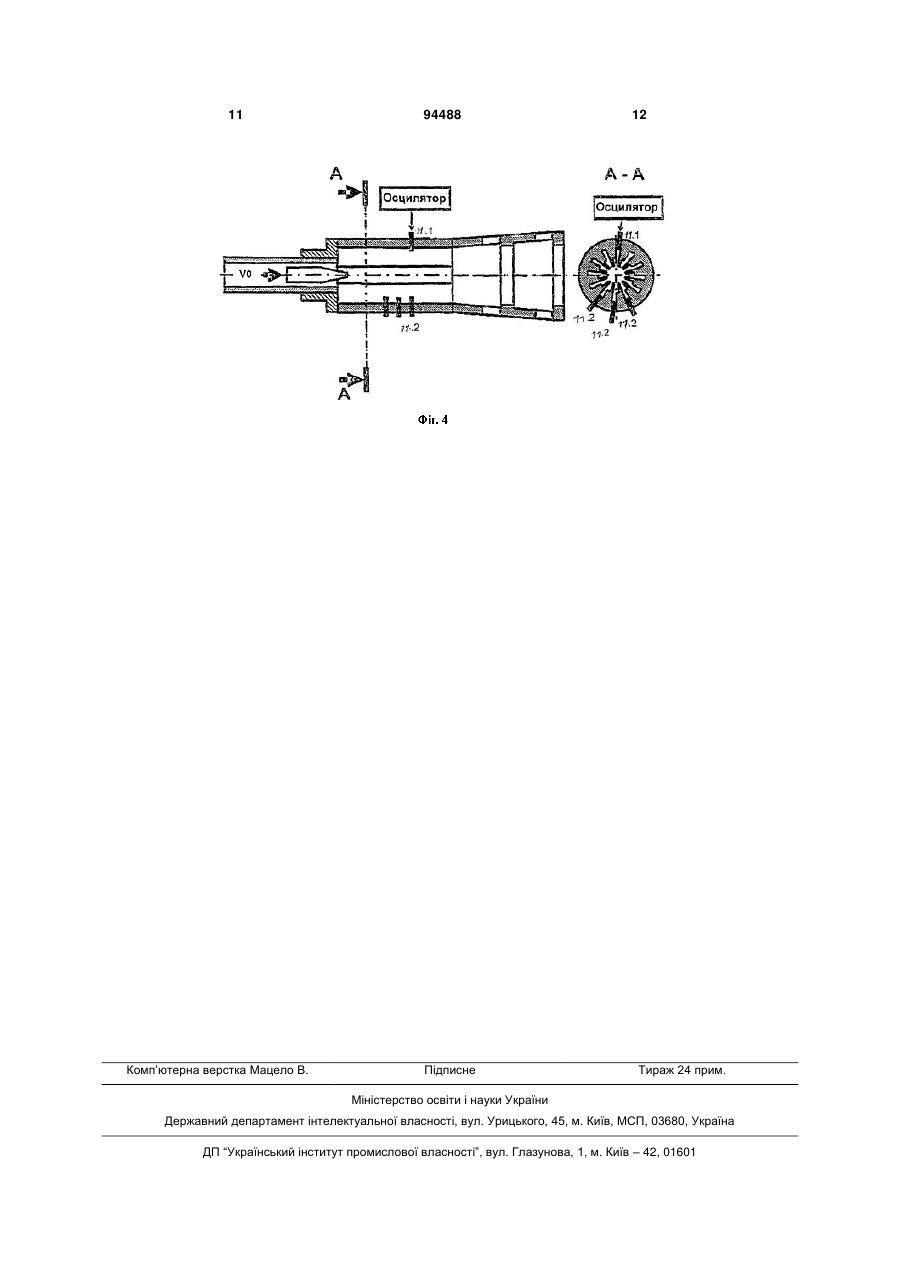
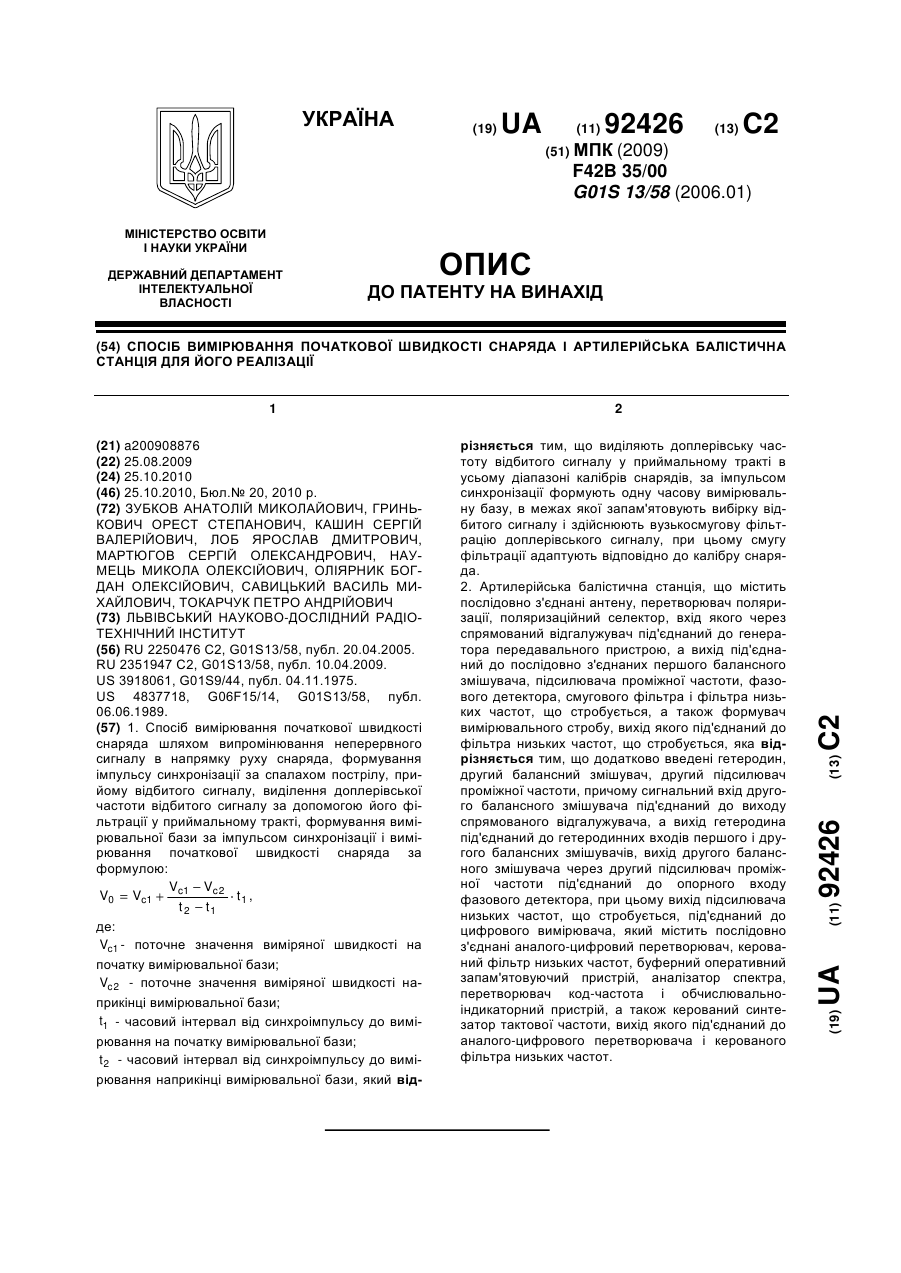
1. Спосіб вимірювання швидкості снаряда (2) або подібного об'єкта в стволі гармати або пусковій трубі (1) або в дуловому гальмі (3), при цьому ствол гармати (1) або дулове гальмо (3) використовуються як хвилевід, який відрізняється тим, що хвилевід працює в режимі нижче граничної частоти відповідного хвилеводу електромагнітних коливань (ТЕ; ТМ). 2. Спосіб за п. 1, який відрізняється тим, що поточна швидкість снаряда (Vt) безупинно вимірюється і реєструється в блоці обробки. 3. Спосіб за п. 1 або 2, який відрізняється тим, що характер зміни швидкості снаряда в часі (t) визначається у хвилеводі. 4. Спосіб за одним із пп. 1-3, який відрізняється тим, що швидкість (V0) снаряда (2) може бути ви C2 2 (19) 1 3 як правило, у вигляді інформації снаряда перед виходом його із зони дула гармати. В описі до патенту DE 697 09 291 Т2 (ЕР 0 840 087 В1) представлені засоби для керування вхідною швидкістю снаряда. При цьому передбачена система датчиків, призначених для виміру параметра, пов'язаного з початковою швидкістю снаряда. Це проводиться за допомогою встановлених в або на стволі гармати датчиків, які можуть сприймати високий тиск у стволі гармати, що виникає внаслідок нагрівання робочого газу на стволі гармати. У якості датчиків пропонуються тензометричні смужки, які розташовані таким чином, що перебувають у постійному контакті зі стволом гармати. При цьому вони вимірюють ступінь подовження ствола гармати. Виходячи з тимчасової різниці між реєстрацією проходження снаряда цими двома окремими датчиками визначається рух і, отже, швидкість снаряда. У патенті DE 103 52 047 А1 запропоновано встановити на стволі гармати або безпосередньо в стволі щонайменше два датчика, віддалені один від одного. При проходженні снаряда, внаслідок тиску газів на дно снаряда датчики піддаються розширенню, що перетворюється в електричний сигнал, що при необхідності після підсилення передається в блок обробки сигналу. У якості датчиків використовуються, переважно, кварцові датчики у формі поздовжніх вимірювальних штирів, які встановлюються або в несучому кільці, або на стволі гармати або безпосередньо в ньому. Кварцові датчики мають ту перевагу, що вони перетворюють у сигнали навіть дуже незначні зміни тиску, крім того вони мають надійну конструкцію і точно відповідають місцю установки, завдяки чому забезпечується надійний контакт зі стволом гармати і виключається зсув датчиків. Крім того, за рахунок цього механічні навантаження ствола гармати не впливають на результат виміру при непрямому вимірі тиску. Датчики не піддаються безпосередньо тиску газів, крім того вони вбудовуються у відповідні корпуси з міцною структурою. Відповідно до патенту DE 10 2005 024 179 А1 взагалі відмовилися від безпосереднього виміру поточної швидкості снаряда, тому що реальна швидкість визначається, виходячи з інформації про поточну швидкість польоту снаряда, тобто швидкість розраховується за цим значенням. Виходячи із цієї поточної швидкості польоту снаряда на підставі стандартної швидкості, проводиться корекція попередньо заданого моменту запалення і у цьому випадку вже використовується в якості актуального для даного випадку моменту установки зривника. Для передачі цієї інформації на снаряд призначено мікрохвильовий передавальний пристрій, переважно в діапазоні Ггц, що передає поточний темп стрільби на боєприпаси або на снаряд, наприклад, що визначається лічильнообчислювальним приладом керування вогнем. Інший спосіб полягає в тому, що ствол використовується в режимі круглого хвилеводу і при цьому вимірюється доплерівська частота снаряда в стволі (відповідно до опису до патенту ЕР 0 023 365 А2). При цьому частота сигналу перевищує граничну частоту для даного режиму роботи хви 94488 4 леводу. Електромагнітна хвиля, що генерується при цьому, поширюється в стволі і відбивається від снаряда. На підставі цього, залежно від поточної швидкості снаряда, має місце зміщення доплерівської частоти. Недоліком цих технічних рішень є те, що два датчики повинні перебувати на певній відстані один від одного. Внаслідок такої конструкції подовжується вимірювальний пристрій в дулі ствола гармати. Це може привести до нестабільності гармати в цілому або до проблем при використанні підкаліберних боєприпасів. Крім того, при виході зі ствола вивільнювані діафрагми можуть ушкодити вимірювальний пристрій. Крім того, датчики повинні бути закріплені безпосередньо в стволі гармати або на ньому. У багатьох випадках постачальник стволів гармати і постачальник вимірювального пристрою швидкості снаряда є різними підприємствами. Це приводить до того, що розміщення датчиків на стволі або в ньому зв'язане зі значними труднощами або взагалі неможливо. Вимірювальний пристрій вхідної швидкості снаряда повинен функціонувати незалежно від використовуваного ствола гармати без усякої зміни його конструкції або параметрів. Інший недолік полягає в тому, що вимір швидкості польоту і програмування моменту запалення поза стволом гармати за допомогою мікрохвильового передавального пристрою вимагає певного ступеню перешкодостійкості при передачі сигналу між датчиками і снарядом. Природні перешкоди, а також штучні перешкоди від генератора перешкод негативно позначаються на вимірі швидкості польоту снаряда і наступному програмуванні або взагалі роблять їх неможливими. Крім того, випромінювання передавального пристрою фіксуються дистанційними методами «Електронного ведення війни» і за рахунок цього визначається місце розташування гармати. У такий спосіб супротивник визначає місце розташування гармати і вживає відповідних заходів для його придушення. У теперішній час діє правило «Дивися, щоб не бачили тебе». Якщо за рахунок сигналів передавального пристрою виявлено місце знаходження гармати, воно піддане великій небезпеці поразки системою озброєння супротивника. Крім того, при вимірі зсуву доплерівської частоти пред'являються певні вимоги до стабільності осцилятора. Вібрації, що виникають при пострілі, можуть змінити миттєве значення частоти передавального пристрою і ускладнити точність виміру зсуву частоти. Крім того, ствол гармати являє собою свого роду відкритий круглий хвилевід і може діяти як антена. Це означає, що є можливість виявлення зовнішнього пристрою, що прослуховує, і тим самим визначити місце знаходження гармати. Задачею даного винаходу є розробка також безконтактної системи виміру швидкості снаряда, що виключає вищевказані недоліки. Поставлена задача вирішується відповідно до відмітних ознак п. 1 формули винаходу. Варіанти виконання описані в залежних пунктах формули винаходу. В основу винаходу закладена ідея, що ствол гармати або пускова труба пускової установки 5 і/або частини дулового гальма також використовувались у якості хвилеводу (у якості хвилеводу служить ствол з характерним поперечним перерізом, що має стінку з дуже високою електропровідністю. У сучасній техніці використовуються, головним чином, прямокутні і круглі хвилеводи), які, однак, працюють при частоті, що нижче режиму роботи даного хвилеводу. (Основні принципи викладені на сайтах http://people.ee. ethz.ch/~kkrohne/AMIV/Wellenkeiter,pdf, стор.24-33, або http://pi p0.prp.phvsik,tudarmstadt.de/~eiakobi/Mikrowel.pdf. Описані в цих матеріалах принципи закладені в основу даного винаходу). У працюючих за таким принципом хвилеводах не має місця поширенню електромагнітних хвиль, тому уздовж хвилеводу не передається енергія. Електромагнітне поле знижується в напрямку хвилеводу в експонентній залежності, що ґрунтується не на омічному поглинанні, а випливає з рішення рівнянь Максвела. При цьому електромагнітне поле повинно задовольняти граничним вимогам для круглого хвилеводу і граничним вимогам на снаряді. При цьому варто враховувати, що круглий хвилевід не обов'язково мусить мати строго круглий переріз. Напроти, у стінці хвилеводу може бути також виконаний профіль, що забезпечує досягнення необхідного трансверсального розподілу електромагнітного поля. На фіг. 3 представлено, яким чином ребриста структура в дуловому гальмі обумовлює тип електромагнітних коливань. При виконанні усіх граничних умов сила сигналу в точці z = 0 (якщо Zk = 0), що визначається положенням снаряда у хвилеводі z = zр. Зсув Zk між ланкою зв'язку передавального пристрою (3.1) і ланкою зв'язку приймального пристрою (3.2) при необхідності може служити для більш ефективної селекції електромагнітних коливань. Однак, у принципі повинно виконуватися рівняння Zk = 0 і це рівняння повинне виконуватися тільки для ланки зв'язку приймального пристрою, що розміщений безпосередньо поруч із ланкою зв'язку передавального пристрою (3.1). На фіг. 3 представлена схема, що включає ланку зв'язку передавального пристрою (3.1) і ланка зв'язку приймального пристрою (3.2). Для підвищення точності виміру, як видно з фіг. 4, безпосередньо послідовно і отже у безпосередній близькості одна від одної, тобто компактно в напрямку кінця ствола перед ланкою зв'язку передавального пристрою (4.1) можуть бути розміщені кілька ланок зв'язку приймального пристрою. При цьому немає необхідності штучного подовження дулового гальма, завдяки чому виключаються недоліки, які властиві довгому вимірювальному пристрою швидкості снаряда. Вимірювальний пристрій утворено стволом гармати або іншою пусковою установкою, що має форму труби, снарядом, дуловою зоною ствола, наприклад дуловим гальмом, щонайменше одним осцилятором, ланкою зв'язку передавального пристрою і мінімум одним або декількома ланками зв'язку приймального пристрою, при цьому їхнє число залежить від необхідної точності вимірювального пристрою. 94488 6 Перевагою цього простого вимірювального пристрою є те, що при цьому не потрібне штучне подовження дулової зони або дулового гальма. Вимірювальний пристрій безпосередньо вбудований в дулове гальмо. Крім того, він може бути використаний незалежно від типу боєприпасів (повнокаліберний або підкаліберний снаряди). Такий вимірювальний пристрій характеризується компактністю, тому що ствол і дулова зона, що, як правило, використовується в стволі гармати як дулове гальмо, входять до складу вимірювального пристрою. Точність вимірювання не залежить від частоти осцилятора і на відміну від відомих вимірювальних пристроїв на основі доплерівської частоти, завдяки чому не потрібне високоточне настроювання стабільної частоти осцилятора. Не допускається тільки зниження нижче нижньої межі частоти і перевищення верхньої межі частоти. Простота виміру забезпечується також за рахунок того, що реєструється не частота, а лінія, що обгинає. Вимірювальний пристрій може використовуватися також у режимі одиночної стрільби. Більш детально сутність винаходу пояснюється на прикладі прикладених креслень. На фігурах представлені: фіг. 1 - принципова схема пристрою для виміру швидкості снаряда; фіг. 2 - схематичний вид обмеженого круглого хвилеводу згідно фіг. 1; фіг. 3 - вид вимірювальної секції, вбудованої в дулове гальмо і оснащеної ребристою структурою для селекції електромагнітних коливань; фіг. 4 - схема згідно фіг. 3в з декількома ланками зв'язку. На фіг. 1 і 2 представлена загальна принципова схема вимірювального пристрою 100 для виконання вимірів відповідно до пропонованого винаходу. Вимірювальний пристрій 100 включає ствол гармати 1, дулове гальмо 3, осцилятор 4, що через лінію передачі сигналу 5 з'єднаний з ланкою зв'язку 6 для його збудження. Ланка зв'язку приймального пристрою 7 призначена для прийому сигналів і за допомогою кабелю 8 для приймального сигналу з'єднана із прийомним блоком, що складається з детектора 9.1 і блока обробки сигналів 9.2. Обидві ланки зв'язку 6, 7 вбудовані в дулове гальмо 3 і утворюють пару ланок зв'язку. Осцилятор 4 через ланку зв'язку 6 збуджує режим електромагнітних коливань хвилеводу (ТЕ; ТМ). При цьому в даному прикладі виконання передбачено, що вибирається частота, яка має значення нижче граничної частоти даного хвилеводу. Бажаний режим електромагнітних коливань хвилеводу збуджується шляхом механічної або електромагнітної селекції електромагнітних коливань. За рахунок системи «ствол» 1 (фіг. 2, хвилевід 1’) і снаряд 2 (фіг. 2, циліндр 2’) генерується сила сигналу по місцю z = 0, що обумовлено позицією z = zр снаряда 2. Ланка зв'язку приймального пристрою 7, у цьому випадку датчик типу Pick-up, приймає цей сигнал, який потім направляється в блок приймального пристрою 9. Як уже було відзначено, вимірювальний пристрій 100 працює при обраному режимі коливань хвилеводу, при якому частота коливань нижче 7 граничної частоти даного режиму електромагнітних коливань хвилеводу або частини хвилеводу, вбудованої в дулове гальмо. Можливе генерування не тільки основних частот коливань, але і більш високих частот електромагнітних коливань хвилеводу. Існують розходження між трансверсальними електричними (ТЕ) і трансверсальними магнітними (ТМ) електромагнітними коливаннями. У цьому випадку можуть бути використані обидва типи коливань. На прикладі фіг. 2 більш детально пояснюється принцип виміру. Якщо круглий хвилевід 1’ обмежений циліндричною цапфою 2’, то електромагнітне поле повинне, з одного боку, відповідати граничним умовам на стінках хвилеводу, а з іншого боку граничним умовам на днище циліндра. Передбачається, що стінки і днище циліндра мають ідеальну електропровідність. Це означає, що тангенціальна складова електричної напруженості поля на цих поверхнях дорівнює нулю (Е = 0 В/м) і що перпендикулярна складова магнітної індукції на цих поверхнях також дорівнює нулю (В = 0 Т). Цього можна досягнути шляхом введення двох складових поля: первісного електромагнітного поля, що виконує тільки граничні умови на стінках, і додаткової складової, що володіє таким же трансверсальним розподілом, як і первісне поле, і тому також виконує граничні умови на стінках. По місцю порушення первісної складової поля z = 0. Частота становить нижче граничної частоти для обраного режиму хвилеводу. Для виконання граничних умов на днище циліндра z = zp генерується друга складова поля, що за рахунок накладення компенсує тангенціальну складову електричної напруженості поля і перпендикулярну складову магнітної індукції первісного поля. Накладення обох складових дає по місцю z = 0 напруженість поля, що залежить від позиції днища циліндра z = zp. Шляхом аналізу тимчасової характеристики напруженості поля по місцю z = 0 можна визначити вхідну швидкість снаряда V0. Як видно з фіг. 3, необхідний режим коливань хвилеводу може бути згенерований механічними мірами, у цьому випадку, наприклад, шляхом використання ребристої структури стінки хвилеводу. Крім того, тип збудження за допомогою ланки зв'язку 10.1 підтримує необхідну селекцію електрома 94488 8 гнітних коливань. На фіг. 3 хвилевід представлений у вигляді частини дулового гальма. Зсув Zk між ланкою зв'язку передавального пристрою 10.1 і ланкою зв'язку приймального пристрою 10.2 за необхідності може служити для більш кращої селекції електромагнітних коливань. У принципі повинне виконуватись рівняння: Zk = 0, що діє тільки для ланки зв'язку приймального пристрою, що розташована після ланки зв'язку передавального пристрою 10.1. На фіг. 4 показано, яким чином за допомогою декількох ланок зв'язку приймального пристрою 11.2 може бути підвищена точність виміру. Варто враховувати, що найбільш віддалена від кінця ствола ланка зв'язку приймального пристрою 11.2 перебуває на такій відстані від кінця ствола, як і ланка зв'язку передавального пристрою 11.1. Це означає, що після ланки зв'язку передавального пристрою 11.1 не може бути встановлена ланка зв'язку приймального пристрою 11.2. Перераховані вище недоліки, що відповідають сучасному рівню розвитку техніки в цій галузі, були усунуті вимірювальним пристроєм відповідно до винаходу за рахунок наступних технічних рішень: - ланки зв'язку (ланка зв'язку передавального пристрою і ланка зв'язку приймального пристрою) розташовані в безпосередній близькості одна від одної і за рахунок цього вбудовані в дулове гальмо (3). При цьому не потрібне збільшення довжини дулового гальма. Крім того, при наявності такої можливості, ланки зв'язку можуть бути вбудовані в ствол гармати; - при неможливості установки вимірювального пристрою в ствол гармати, воно встановлюється тільки в дулове гальмо (фіг. 3). Завдяки цьому вимірювальний пристрій працює незалежно від характеристик ствола і виробника ствола гармати; - вимір швидкості проводиться усередині дулового гальма або ствола гармати, за рахунок чого забезпечується перешкодостійкість; - хвилевід працює в режимі нижче граничної частоти і завдяки його невеликій довжині зводяться до мінімуму випромінювання хвиль у навколишнє середовище; - до осцилятора не пред'являються високі вимоги щодо стабільності, тому що не потрібно проводити вимір доплерівської частоти. 9 94488 10 11 Комп’ютерна верстка Мацело В. 94488 Підписне 12 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of velocity of a missile or a like object
Автори англійськоюFrick, Henry
Назва патенту російськоюСпособ измерения скорости снаряда или подобного объекта
Автори російськоюФрик Генри
МПК / Мітки
МПК: G01P 3/66, F41A 21/32, F41G 3/12
Мітки: об'єкта, швидкості, вимірювання, спосіб, снаряда, подібного
Код посилання
<a href="https://ua.patents.su/6-94488-sposib-vimiryuvannya-shvidkosti-snaryada-abo-podibnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості снаряда або подібного об’єкта</a>
Спосіб вимірювання початкової швидкості снаряда і артилерійська балістична станція для його реалізації
Номер патенту: 92426
Опубліковано: 25.10.2010
Автори: Зубков Анатолій Миколайович, Савицький Василь Михайлович, Мартюгов Сергій Олександрович, Лоб Ярослав Дмитрович, Кашин Сергій Валерійович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Наумець Микола Олексійович, Токарчук Петро Андрійович, Гринькович Орест Степанович
МПК: F42B 35/00, G01S 13/58
Мітки: станція, швидкості, реалізації, початкової, снаряда, артилерійська, балістична, вимірювання, спосіб
Формула / Реферат:
1. Спосіб вимірювання початкової швидкості снаряда шляхом випромінювання неперервного сигналу в напрямку руху снаряда, формування імпульсу синхронізації за спалахом пострілу, прийому відбитого сигналу, виділення доплерівської частоти відбитого сигналу за допомогою його фільтрації у приймальному тракті, формування вимірювальної бази за імпульсом синхронізації і вимірювання початкової швидкості снаряда за формулою:
Пристрій для вимірювання швидкості прольоту метального снаряда зі свинцю і його сплавів
Номер патенту: 57257
Опубліковано: 10.02.2011
Автор: Мартинов Юрій Ігоревич
Мітки: метального, вимірювання, свинцю, швидкості, снаряда, пристрій, сплавів, прольоту
Формула / Реферат:
1. Пристрій для вимірювання швидкості метального снаряда зі свинцю і його сплавів, переважно пневматичної стрілецької зброї, що включає вузол виміру з двома котушками індуктивності, несучий елемент у вигляді трубки для прольоту метального снаряда, на якому закріплено дві котушки індуктивності, що рознесені на базовій відстані уздовж траєкторії польоту, формувачі імпульсів, вимірювач часових інтервалів і обчислювач, який відрізняється тим, що...
Двочастотний спосіб вимірювання швидкості звуку в матеріалах
Номер патенту: 40118
Опубліковано: 25.03.2009
Автори: Сторожук Олександр Леонідович, Соколовський Ярослав Іванович, Борисов Віктор Михайлович
МПК: G01N 29/12
Мітки: двочастотний, спосіб, вимірювання, швидкості, звуку, матеріалах
Формула / Реферат:
Двочастотний спосіб вимірювання швидкості звуку в матеріалах, при якому в одному перерізі зразка матеріалу збуджують зондуючий акустичний сигнал, а в другому, на відомій відстані, приймають і вимірюють частоту та зсув фаз коливань у цих перерізах, який відрізняється тим, що знаходять другу частоту, найближчу до першої, з таким самим зсувом фаз, а швидкість звуку знаходять множенням різниці частот на відстань між перерізами.
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 49407
Опубліковано: 26.04.2010
Автори: Параніч Віктор Петрович, Васильєв Олександр Павлович, Бурачек Всеволод Германович, Бєлятинський Андрій Олександрович, Беленок Вадим Юрійович
МПК: G01S 13/92, G01P 3/42
Мітки: зовнішнього, спосіб, руху, вимірювання, об'єкта, швидкості
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ці моменти, які...
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 91661
Опубліковано: 10.08.2010
Автори: Параніч Віктор Петрович, Бурачек Всеволод Германович, Бєлятинський Андрій Олександрович, Васильєв Олександр Павлович, Беленок Вадим Юрійович
МПК: G01S 13/58
Мітки: спосіб, об'єкта, вимірювання, зовнішнього, руху, швидкості
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ті моменти, які...
Попередній патент: Батометр-дегазатор донних вод
Наступний патент: Спосіб приготування каталізатора горіння вуглеводневого палива для двигунів внутрішнього згоряння
Випадковий патент: Сферичний шарикопідшипник