Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 91661
Опубліковано: 10.08.2010
Автори: Васильєв Олександр Павлович, Параніч Віктор Петрович, Беленок Вадим Юрійович, Бурачек Всеволод Германович, Бєлятинський Андрій Олександрович
Формула / Реферат
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ті моменти, які утворюють низьку частоту, пропорційну швидкості зовнішнього об'єкта.
Текст
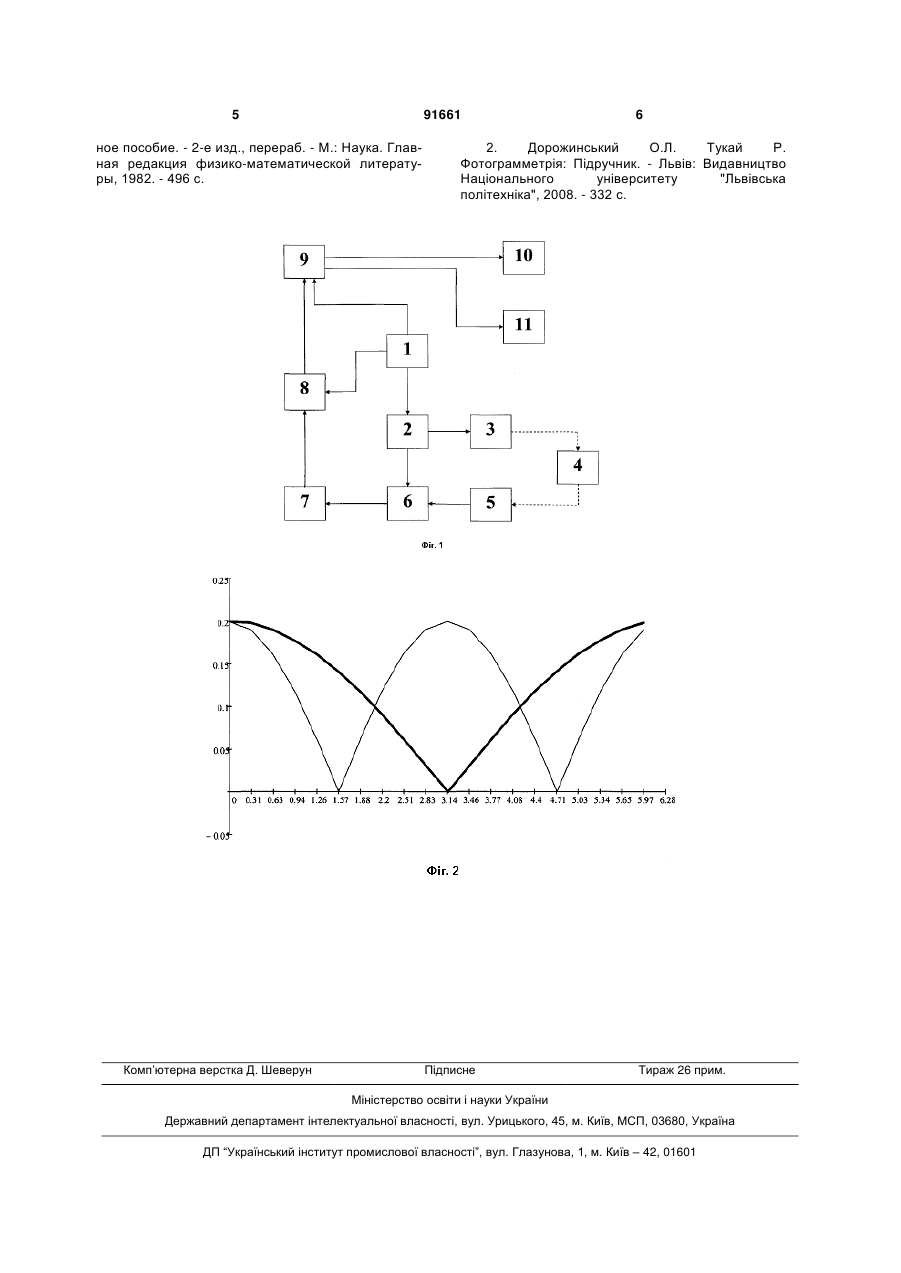
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ті моменти, які утворюють низьку частоту, пропорційну швидкості зовнішнього об'єкта. (19) (21) a200912051 (22) 24.11.2009 (24) 10.08.2010 (46) 10.08.2010, Бюл.№ 15, 2010 р. (72) БЄЛЯТИНСЬКИЙ АНДРІЙ ОЛЕКСАНДРОВИЧ, БЕЛЕНОК ВАДИМ ЮРІЙОВИЧ, БУРАЧЕК ВСЕВОЛОД ГЕРМАНОВИЧ, ВАСИЛЬЄВ ОЛЕКСАНДР ПАВЛОВИЧ, ПАРАНІЧ ВІКТОР ПЕТРОВИЧ (73) КОЛЕДЖ ІНФОРМАЦІЙНИХ ТЕХНОЛОГІЙ ТА ЗЕМЛЕВПОРЯДКУВАННЯ НАУ (56) UA 86917 C2, G01S13/00, публ. 25.12.2008. GB 1468159, G01S9/46, публ. 23.03.1977. RU 2126164 С1, G01S13/58, публ. 10.02.1999. GB 2318009 A, G01S13/60, 13/02, публ. 06.04.1998. 3 Власне пристрій вимірювання швидкості (блоки 1, 2, 3, 5, 6, 7, 8, 9, 10 та 11 на фіг. 1) виконаний у корпусі з підставкою і при роботі його встановлюють на нерухомому або рухомому об'єкті (наприклад, автомобілі). Рухомий об'єкт 4, швидкість якого визначається (автомобіль, катер і т.п.), є відбивачем електромагнітних імпульсів. На фіг. 1 суцільними лініями зі стрілками позначені провідні електричні зв'язки, а штриховими лініями зі стрілками - дистанційні непровідні зв'язки. Опис роботи даного пристрою пояснює сутність запропонованого технічного рішення і полягає в наступному. Із блока керування та обробки інформації (блок 1) подають сигнал на включення генератора електричних сигналів постійної частоти (блок 2). Генератор виробляє електричний сигнал опорної частоти і передає його в випромінювач імпульсів (блок 3), який формує електричний сигнал від генератора в короткі електромагнітні імпульси у напрямку рухомого об’єкта (блок 4). Імпульси, відбиті від рухомого об’єкта, приймаються прийомним пристроєм (блок 5) і детектуються в електричний сигнал. Частота випромінюваних (прямих) імпульсів fпр дорівнює: 1 fпр T , (1) де Т - період проходження прямих Імпульсів. При цьому частота відбитих імпульсів fв буде такою ж: 1 fв T , (2) Після попереднього підсилення у приймачі відбиті імпульси надходять у змішувач частот (блок 6), в який також надходять прямі імпульси від генератора, що мають частоту випромінюваного блоком 3 сигналу. Таким чином, при прийомі прямих і відбитих імпульсів у прийомний канал будуть надходити дві однакові частоти fпр і fв, що мають деяку різницю фаз. Отримані у змішувачі результуючі сигнали направляють у блок 7 - фільтр високої частоти (ФВЧ). ФВЧ пропускає сигнал, в якому амплітуда першої гармоніки досягає свого мінімуму, а амплітуда другої гармоніки - максимуму. Це Ілюструє фіг. 2, де показана залежність амплітуд гармонік від різниці фаз прямих і відбитих імпульсів. Цій умові відповідає момент, коли часова затримка (різниця фаз) між прямими і відбитими Імпульсами, що надходять у змішувач, буде дорівнювати половині періоду проходження імпульсів - це є точки на графіках амплітуд А1 та А2, абсциси яких рівні 3.14 (на фіг. 2). На фіг. 2: • - графік амплітуди першої гармоніки (опорної частоти); • - графік амплітуди другої гармоніки (подвійної частоти). Як видно з фіг. 2 при різниці фаз = мінімум амплітуди першої гармоніки (максимум амплітуди другої гармоніки) відповідає моменту, коли різниця фаз між прямими (випромінюваними) 91661 4 і відбитими імпульсами, що надходять у змішувач з генератора та прийомного пристрою відповідно, дорівнює половині періоду проходження імпульсів і також відповідає моменту, коли отримана у змішувачі частота F буде подвійною по відношенню до опорної: F = 2fпр. Таким чином, при постійній зміні положення зовнішнього об’єкта змішувач формує частоту F, у два рази вищу, ніж опорна (подана генератором). У кожний момент настання подвійної частоти ФВЧ пропускає сигнал з частотою F = 2fпр у блок 8 (рахунковий вузол). Таким чином, формується сигнал низької частоти моментів настання подвійної частоти, який є пропорційним швидкості руху зовнішнього об’єкта. Рахунковий вузол підраховує кількість моментів появи подвійної частоти протягом часу вимірювань. Час вимірювань рахунковий вузол обчислює за кількістю імпульсів, що вкладаються в цей час, як добуток періоду імпульсів опорної частоти на кількість моментів появи подвійної частоти. Величина періоду імпульсів опорної частоти разом із значенням довжини хвилі опорної частоти передається з блока 1 у блок 8 (у блок 1 ці значення вводяться із паспорта генератора або за результатами калібрування). Блок 8 передає сформовані в ньому дані (час вимірювань і кількість моментів утворення подвійної частоти за цей час, значення довжини хвилі опорної частоти) у блок обчислення швидкості (блок 9). Блок 9 обчислює добуток довжини хвилі подвійної частоти F (півдовжина хвилі опорної частоти) на кількість моментів появи подвійної частоти протягом часу вимірювань у відношенні до часу вимірювань - це є швидкість руху зовнішнього об’єкта, визначена в одиницях відношення одиниць вимірювання довжини хвилі до одиниць визначення часу вимірювань. При цьому з блока 1 у блок 9 передають значення виправлень за температуру, атмосферний тиск і вологість навколишнього середовища. Ці дані можуть бути введені в блок 1 за допомогою ручного набору чи безпосередньо від відповідних датчиків. З блока 9 у блок індикації 10 передають результати вимірів. Інформація про результати вимірювань також передається з блока 9 у блок 11 - блок запису і збереження інформації. Через те, що віддаль між передавачем і зовнішнім об'єктом швидко змінюється, частота коливань, які приходять на приймач, може відрізнятися від частоти випромінюваних передавачем коливань, тобто має місце ефект Допплера. У цьому випадку при великій швидкості руху зовнішнього об’єкта слід вводити у блок 1 поправку за частоту Допплера, яка (поправка) з блока 1 передається у блок 9. Таким чином, запропонований спосіб вимірювання швидкості руху зовнішнього об’єкта дозволяє одержати підвищення точності вимірювань за рахунок виключення необхідності вимірювати різницю фаз між прямими і відбитими імпульсами. Література 1. Савельев И.В. Курс общей физики, т. 2. Электричество и магнетизм. Волны. Оптика: Учеб 5 91661 ное пособие. - 2-е изд., перераб. - М.: Наука. Главная редакция физико-математической литературы, 1982. - 496 с. Комп’ютерна верстка Д. Шеверун 6 2. Дорожинський О.Л. Тукай Р. Фотограмметрія: Підручник. - Львів: Видавництво Національного університету "Львівська політехніка", 2008. - 332 с. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of velocity of movement of external object
Автори англійськоюBieliatynskyi Andrii Oleksandrovych, Belenok Vadym Yuriiovych, Burachek Vsevolod Hermanovych, Vasyliev Oleksandr Pavlovych, Paranich Viktor Petrovych
Назва патенту російськоюСпособ измерения скорости движения внешнего объекта
Автори російськоюБелятинский Андрей Александрович, Беленок Вадим Юрьевич, Бурачек Всеволод Германович, Васильев Александр Павлович, Паранич Виктор Петрович
МПК / Мітки
МПК: G01S 13/58
Мітки: швидкості, руху, об'єкта, зовнішнього, вимірювання, спосіб
Код посилання
<a href="https://ua.patents.su/3-91661-sposib-vimiryuvannya-shvidkosti-rukhu-zovnishnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання швидкості руху зовнішнього об’єкта</a>
Спосіб вимірювання швидкості руху зовнішнього об’єкта
Номер патенту: 49407
Опубліковано: 26.04.2010
Автори: Васильєв Олександр Павлович, Бурачек Всеволод Германович, Беленок Вадим Юрійович, Параніч Віктор Петрович, Бєлятинський Андрій Олександрович
МПК: G01S 13/92, G01P 3/42
Мітки: швидкості, вимірювання, об'єкта, руху, зовнішнього, спосіб
Формула / Реферат:
Спосіб вимірювання швидкості руху зовнішнього об'єкта, заснований на методі імпульсної локації об'єкта, який відрізняється тим, що при прийомі відбитого електромагнітного випромінювання змішану частоту імпульсів прямого й відбитого випромінювання пропускають через високочастотний фільтр, настроєний на подвійну частоту випромінювання, при цьому фіксують моменти появи подвійної частоти випромінювання й формують сигнали в ці моменти, які...
Пристрій для вимірювання довжини та швидкості руху виробів
Номер патенту: 70581
Опубліковано: 25.07.2007
Автори: Лютов Ігор Валерійович, Баранов Юрій Вячеславович, Бондар Анатолій Юрьйович, Маслак Віктор Миколайович
МПК: G01B 7/02
Мітки: швидкості, довжини, виробів, пристрій, руху, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання довжини і швидкості руху виробів, який містить датчик довжини, з'єднаний входом з першим виходом джерела стабілізованих напруг, другий вихід якого підключений до першого входу блока індикації, а виходом - із входом формувача імпульсів, комутатор, вихід якого приєднаний до приводу руху виробу, який відрізняється тим, що в нього введені контролер, який складається із з'єднаних між собою центрального процесорного...
Магнітоелектричний спосіб вимірювання швидкості руху об’єкта
Номер патенту: 40603
Опубліковано: 15.08.2001
Автор: Джурук Володимир Юрійович
МПК: G01P 3/42
Мітки: руху, вимірювання, об'єкта, швидкості, спосіб, магнітоелектричний
Формула / Реферат:
Магнитоэлектрический способ изменения скорости движения объекта, заключающийся в том, что измеряют выходной сигнал датчика и по нему судят о скорости движения объекта, отличающийся тем, что датчик устанавливают на объекте, а в качестве датчика используют постоянный магнит с обмоткой, вращают его вокруг оси, перпендикулярной направлению движения объекта, и скорость V движения объекта определяют по формулегдеС -...
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини
Номер патенту: 44406
Опубліковано: 12.10.2009
Автори: Квасніков Володимир Павлович, Ларін Віталій Юрійович, Харченко Володимир Петрович
МПК: G01C 23/00
Мітки: вимірювання, спосіб, занурення, наземний, установці, швидкості, машини, глибини, підйомної, руху, кліті
Формула / Реферат:
Спосіб вимірювання швидкості руху і глибини занурення кліті при наземній установці підйомної машини, заснований на вимірюванні оборотів колеса, який відрізняється тим, що два чутливі елементи феромагнітного первинного перетворювача встановлюють один над одним на відстані не менше ширини осі колеса підйому, на віддаленні від площини колеса, достатньому для спрацьовування чутливих елементів феромагнітного перетворювача, і на відстані від вала...
Цифровий прилад вимірювання швидкості руху об’єктів
Номер патенту: 33444
Опубліковано: 25.06.2008
Автори: Наконечний Адріан Йосифович, Тишик Іван Ярославович
МПК: H03B 5/18
Мітки: руху, об'єктів, цифровий, прилад, вимірювання, швидкості
Формула / Реферат:
Цифровий прилад вимірювання швидкості руху об'єктів, що складається з послідовно з'єднаних приймача відбитого сигналу зондування, змішувача, вхід якого з'єднаний з виходом випромінювача разом з еталонним генератором, аналого-цифрового перетворювача та індикатора, який відрізняється тим, що додатково містить антиелайсінговий фільтр, вихід якого з'єднаний з входом аналогового перетворювача та послідовно з'єднаних дискретного...
Попередній патент: Двосекційний газотурбовоз
Наступний патент: Самофлюсувальні котуни для доменних печей і спосіб їх виготовлення
Випадковий патент: Спосіб швидкого виявлення, виділення та підрахунку апоптичних клітин, що базується на аглютинації