Спосіб безпечного заходу на посадку повітряних кораблів
Номер патенту: 95752
Опубліковано: 12.01.2015
Формула / Реферат
1. Спосіб безпечного заходу на посадку повітряних кораблів, при якому створюється умовне силове поле, в яке розміщають позиції повітряних суден, позиції віртуальних тягачів, призначають потенціали, розраховують сили, що діють на повітряні судна, і на основі цих сил розраховують керуючі впливи для виведення ПС на трасу заходу на посадку, а також запобігання конфлікту зіткнення повітряних суден між собою при заході на посадку, який відрізняється тим, що створюють віртуальну модель термінальної зони з простором повітряних суден, що заходять на посадку, цим повітряним суднам, їхнім умовним тягачам призначають потенціали, що є одночасно функцією двох сил взаємодії: сил притягання та сил відштовхування.
2. Спосіб безпечного заходу на посадку за п. 1, який відрізняється тим, що як управління використовують тільки кут повороту вектора швидкості повітряного судна, який є функцією градієнта сумарних сил притягання та відштовхування, що діють на повітряне судно із боку віртуального тягача та інших повітряних суден.
Текст
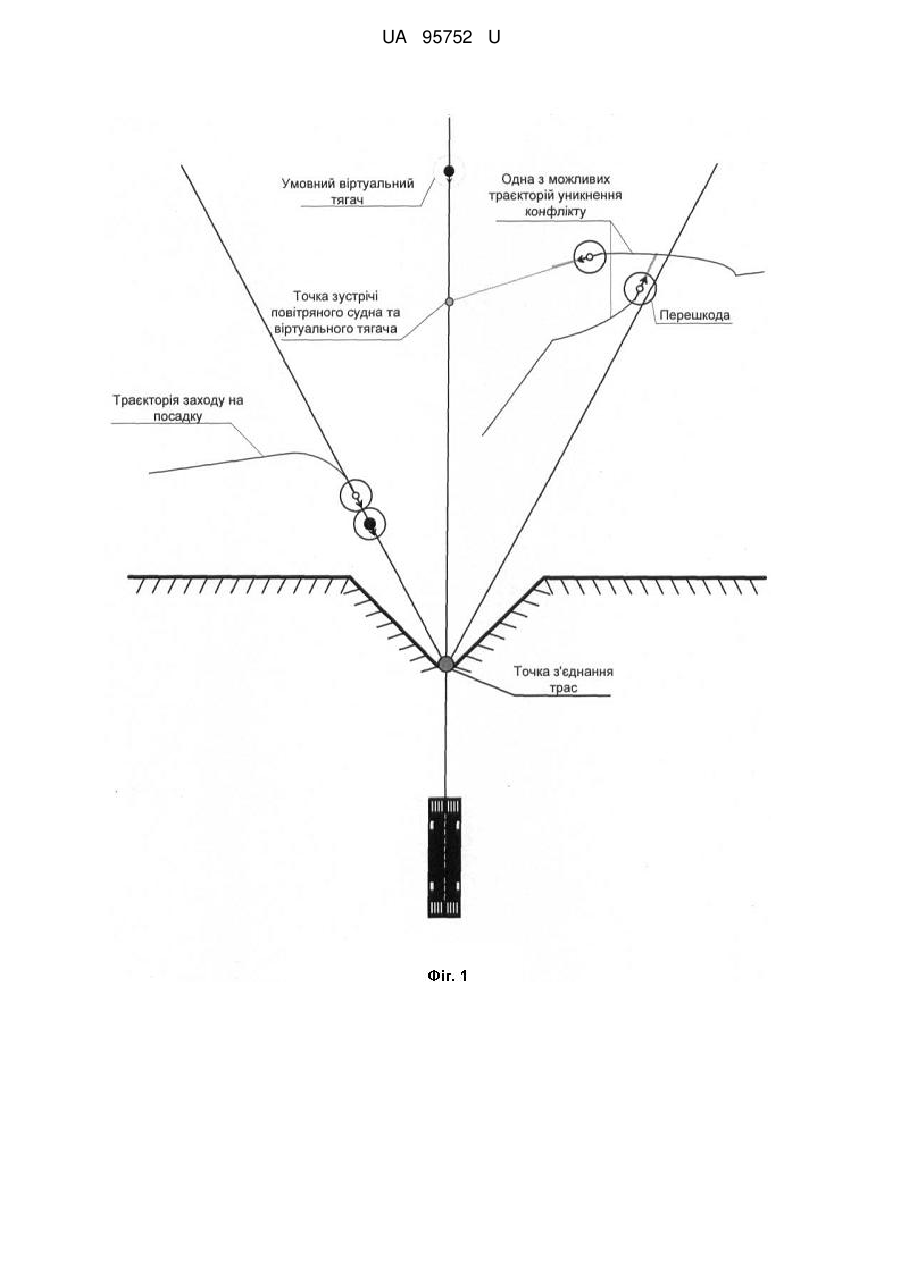
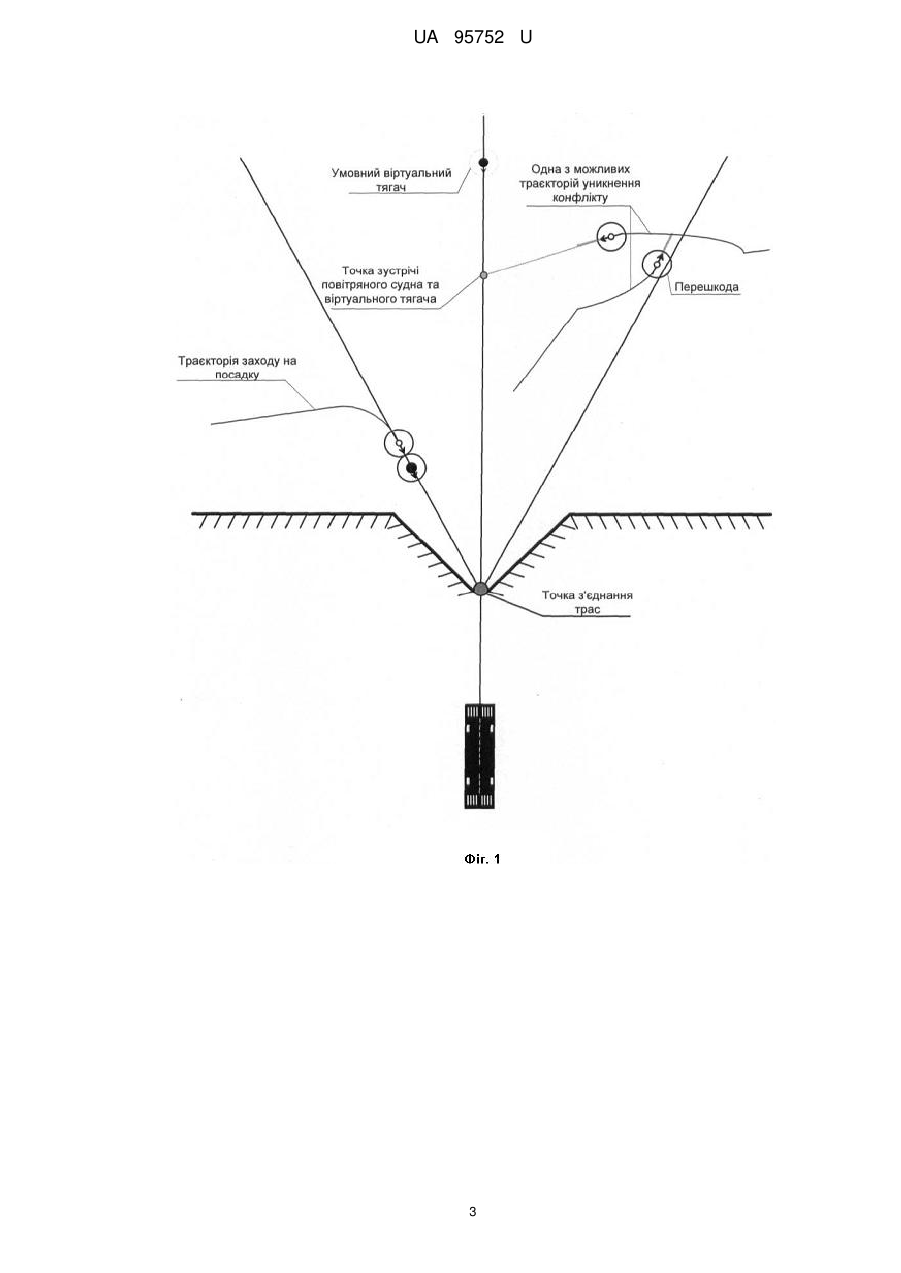
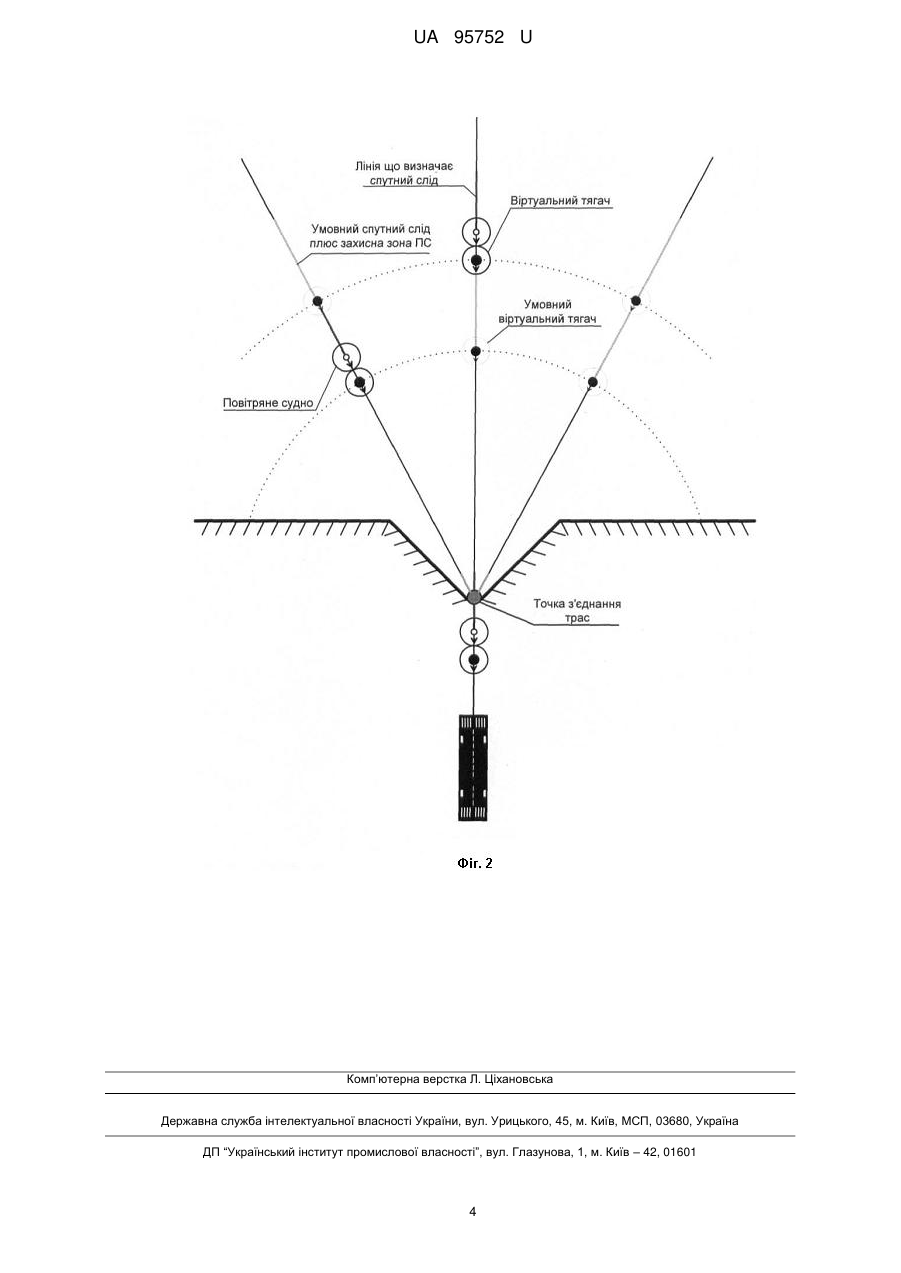
Реферат: Спосіб безпечного заходу на посадку повітряних кораблів, при якому створюється умовне силове поле, в яке розміщають позиції повітряних суден, позиції віртуальних тягачів, призначають потенціали, розраховують сили, що діють на повітряні судна, і на основі цих сил розраховують керуючі впливи для виведення ПС на трасу заходу на посадку, а також запобігання конфлікту зіткнення повітряних суден між собою при заході на посадку. Створюють віртуальну модель термінальної зони з простором повітряних суден, що заходять на посадку, цим повітряним суднам, їхнім умовним тягачам призначають потенціали, що є одночасно функцією двох сил взаємодії: сил притягання та сил відштовхування. UA 95752 U (54) СПОСІБ БЕЗПЕЧНОГО ЗАХОДУ НА ПОСАДКУ ПОВІТРЯНИХ КОРАБЛІВ UA 95752 U UA 95752 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області управління повітряними суднами, зокрема до способів розв'язання конфліктів зіткнень в обмеженому просторі між повітряними суднами при заході на посадку. Корисна модель поширюється на множину класів цілеспрямованих повітряних суден, як керованих людиною безпосередньо, дистанційно, так і автоматичних апаратів і роботів, наприклад літальних апаратів, космічних апаратів. Найбільш відомим є спосіб розв'язання конфліктів зіткнення, що базується на використанні властивостей потенційних силових полів. Суть даного способу полягає в наступному. Всім рухомим об'єктам і їхнім перешкодам призначають потенціали одного знака, а цільовим позиціям рухомих об'єктів потенціали іншого знака. У результаті на кожний рухомий об'єкт діють сили притягання до своєї цілі та відштовхування від інших рухомих об'єктів і перешкод. Результуючу силу використовують для формування управління рухом об'єкта до цілі та для запобігання зіткнення з іншими рухомими об'єктами та з перешкодами. Відомий також спосіб визначення альтернативного шляху для обходу перешкод мобільною машиною [1]. Спосіб призначенні заряду одного знаку для мобільної машини і перешкод, призначенні заряду іншого знаку для цільового пункту маршруту мобільної машини, обчисленні сумарної сили, що діє на мобільну машину з боку перешкод і цілі. Силу розраховують як функцію, що обернено пропорційна квадрату відстані між повітряними суднами. Вектор сумарної сили є керуючим сигналом для обходу мобільною машиною перешкод і руху до цільового пункту. Недоліками відомого способу є те, що сили притягання до цілі та відштовхування від перешкод є нелінійними функціями, тому при зближенні повітряних суден, або при зближенні з ціллю необмежено зростає значення функції сумарної сили і прискорення мобільної машини на малих відстанях від перешкод і малих відстанях до цілі, що унеможливлює визначення функції управління мобільною машиною. Найбільш близьким технічним рішенням, вибраним за прототип, є спосіб кооперативного розв'язання конфліктів повітряного руху [2]. Спосіб полягає в тому, що повітряним судам і їхнім перешкодам призначають потенціали однакового знаку, а цільовим пунктам кожного повітряного судна призначаються потенціали протилежного знаку. Взаємне розташування всіх потенціалів формує потенціальне поле. Градієнт потенціального поля визначає напрямок і величину сили, що діє в точці положення кожного повітряного судна. Недоліки технічного рішення, вибраного за прототип: 1. При зростанні кількості конфліктів необмежено зростає складність обчислення нових координат повітряного судна, що призводить до обчислювального колапсу. 2. Складність реалізації способу через необхідність накладання обмежень на вектори прискорення, швидкості й кута повороту повітряного судна. В основу корисної моделі поставлена задача забезпечення гарантованого заходу на посадку в конфліктних ситуаціях великої складності шляхом усунення недоліків прототипу та доопрацюванням для роботи в режимі посадки. Поставлена задача вирішується тим, що згідно з корисною моделлю створюють віртуальну модель термінальної зони з простором повітряних суден, що заходять на посадку, цим повітряним суднам, їхнім умовним тягачам призначають потенціали, що є одночасно функцією двох сил взаємодії: сил притягання та сил відштовхування, а як управління використовують тільки кут повороту вектора швидкості повітряного судна, який є функцією градієнта сумарних сил притягання та відштовхування, що діють на повітряне судно із боку віртуального тягача та інших повітряних суден. Суть корисної моделі способу безпечного заходу на посадку полягає в тому, що кожному повітряному судну, що заходить на посадку призначають окремий рухомий віртуальний тягач, що рухається по визначені траєкторії. І повітряному судну і віртуальному тягачу призначають потенціали протилежних знаків, які діють одне на одного таким чином: - повітряне судно та його віртуальний тягач притягуються на далеких відстанях, та відштовхуються на близьких, що визначає захисну зону; - повітряні судна між собою відштовхуються; - віртуальний тягач одного повітряного судна не впливає на інше повітряне судно; - віртуальні тягачі не впливають один на одного. Таким чином забезпечують розв'язання поліконфліктів повітряних суден при заході на посадку при можливих перешкодах з боку інших учасників повітряного руху, фіг. 1. Загальна картина заходу на посадку за даним методом представлена на фіг. 2. Спосіб безпечного заходу на посадку повітряних кораблів реалізують в такий спосіб. 1 UA 95752 U 5 10 15 20 25 30 35 40 1. Задають модель повітряного судна зі всіма потрібним для моделювання енергетичними, техніко-економічними та параметричними характеристиками, а також фізико-механічними властивостями навігаційного середовища. 2. За даними координат визначають курс повітряного судна та визначають точку зустрічі повітряного судна з трасою заходу на посадку. 3. Виходячи з даних координат точки зустрічі визначають відстань від повітряного корабля (ПК) до точки зустрічі з трасою r. 4. На трасу встановлюють віртуальний тягач, що знаходиться на відстані (r-d). d - діаметр захисної зони ПК та тягача. Швидкість тягача встановлюють рівною швидкості ПК. Вектор швидкості має напрямок на злітно-посадкову смугу (ЗПС) та рухається по попередньо встановлені трасі. Також за віртуальним тягачем встановлюють заборонну зону, що характеризує супутній слід ПК до якого прив'язаний цей тягач. Цю зону продублюють на інших трасах, якщо вони зв'язані, з урахуванням захисної зони ПК та тягача. 5. При зближенні на встановлені відстані між ПК та віртуальним тягачем починає діяти сила притягання, за допомогою чого визначають початок маневру заходу ПК на трасу. Зближення ПК та тягача буде відбуватись до моменту коли сила притягання буде переважена силою відштовхування для забезпечення захисної зони. 6. За допомогою сил притягання та відштовхування ПК буде виведений на трасу тягачем та продовжить рух по ній до моменту здійснення посадки, або встановленого моменту припинення дії сил між ПК та віртуальним тягачем. Порівняльний аналіз технічного рішення, що заявляється, із прототипом, дозволяє зробити висновок, що безпечний спосіб заходу на посадку відрізняється тим, що повітряним суднам, їхнім цілям, динамічним і статичним перешкодам призначають потенціали, що є одночасно функцією двох сил взаємодії сил притягання й сил відштовхування, як управління при запобіганні конфлікту зіткнення повітряних суден використовують тільки кут повороту вектора швидкості повітряного судна, що є функцією градієнта сумарних сил притягання та відштовхування, діючих на повітряне судно із боку інших повітряних суден. Підвищення ефективності використання технічного рішення, що заявляється, у порівнянні із прототипом, полягає в тому, що: 1. При використанні даного способу підвищується пропускна здатність термінального повітряного простору. 2. Забезпечується гарантоване розв'язання конфліктів будь-якої розмірності при великі кількості повітряних суден, що заходять на посадку. 3. Зменшується час простою ЗПС при очікуванні ПК, що заходить на посадку. 4. Зменшується кількість маневрів, що відповідно веде до зменшення пройденої відстані, та зменшення витрат пального. 5. Управління відбувається тільки зміною кутового положення вектора швидкості. Джерела інформації: 1. Патент США № US6134502, МПК G06F 9/00, G06N 7/00, 2000 (аналог). 2. Патент США № US5961568, МПК G08G 5/04, 1999 (прототип). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 1. Спосіб безпечного заходу на посадку повітряних кораблів, при якому створюється умовне силове поле, в яке розміщають позиції повітряних суден, позиції віртуальних тягачів, призначають потенціали, розраховують сили, що діють на повітряні судна, і на основі цих сил розраховують керуючі впливи для виведення ПС на трасу заходу на посадку, а також запобігання конфлікту зіткнення повітряних суден між собою при заході на посадку, який відрізняється тим, що створюють віртуальну модель термінальної зони з простором повітряних суден, що заходять на посадку, цим повітряним суднам, їхнім умовним тягачам призначають потенціали, що є одночасно функцією двох сил взаємодії: сил притягання та сил відштовхування. 2. Спосіб безпечного заходу на посадку за п. 1, який відрізняється тим, що як управління використовують тільки кут повороту вектора швидкості повітряного судна, який є функцією градієнта сумарних сил притягання та відштовхування, що діють на повітряне судно із боку віртуального тягача та інших повітряних суден. 2 UA 95752 U 3 UA 95752 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюChepizhenko Valerii Ivanovych
Автори російськоюЧепиженко Валерий Иванович
МПК / Мітки
МПК: G06F 9/00, G08G 5/00, G06N 7/00, G05D 1/00
Мітки: повітряних, безпечного, кораблів, заходу, спосіб, посадку
Код посилання
<a href="https://ua.patents.su/6-95752-sposib-bezpechnogo-zakhodu-na-posadku-povitryanikh-korabliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб безпечного заходу на посадку повітряних кораблів</a>
Спосіб оперативного розв’язання множинних конфліктів повітряних кораблів
Номер патенту: 95750
Опубліковано: 12.01.2015
Автори: Чепіженко Валерій Іванович, Лунека Віталій Васильович, Астаф'єва Наталія Миколаївна, Мельник Ірина Геннадіївна
МПК: G06F 9/00, G08G 5/00, G06N 7/00, G05D 1/00
Мітки: конфліктів, кораблів, спосіб, розв'язання, оперативного, множинних, повітряних
Формула / Реферат:
Спосіб оперативного розв'язання множинних конфліктів повітряних кораблів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих об'єктів між собою й з...
Спосіб дренажування паливних баків повітряних кораблів
Номер патенту: 34310
Опубліковано: 15.02.2001
Автори: Єфіменко Валерій Володимирович, Бойченко Сергій Валерійович
МПК: B64D 37/00
Мітки: кораблів, паливних, повітряних, баків, спосіб, дренажування
Текст:
...Спосіб працює таким чином. Під час заправки паливних баків 1, паливоповітряна суміш по дре нажних трубопроводах 2 поступає в дренажний бак 3, в якому розташовано сорбент 4, що поглинає пари палива. Повітря, очищене від вуглеводнів, через повітрозабірники 5, а у разі обмерзання останніх, через запобіжні клапани 6 надходить до атмосфери. По мірі вироблення палива з баків 1, під час польоту, повітря надходить через повітрозабірники 5 в...
Застосування гідробура для буріння лунок під посадку саджанців

Номер патенту: 19395
Опубліковано: 15.12.2006
Автори: Маньковський Микола Васильович, Мацьків Тарас Іванович, Мельник Павло Олексійович
МПК: E21B 7/18
Мітки: гідробура, застосування, посадку, саджанців, лунок, буріння
Формула / Реферат:
Застосування гідробура як засобу для буріння лунок під посадку саджанців із одночасним поливом.
Використання гідробурів для буріння лунок під посадку саду

Номер патенту: 20749
Опубліковано: 15.02.2007
Автори: Мельник Павло Олексійоич, Маньковський Микола Васильович, Мацьків Тарас Іванович
МПК: A01C 5/00
Мітки: використання, посадку, лунок, гідробурів, саду, буріння
Формула / Реферат:
Використання двох гідробурів, під'єднаних до одного обприскувача, як засобу для буріння лунок під посадку саду із одночасним поливом.
Спосіб обробітку грунту під посадку супер-супереліти картоплі з мікробульб
Номер патенту: 24795
Опубліковано: 06.10.1998
Автор: Бугайова Ізабелла Павлівна
МПК: A01B 79/02
Мітки: супер-супереліти, картоплі, посадку, обробітку, спосіб, мікробульб, грунту
Формула / Реферат:
Спосіб обробітку грунту під посадку супер-супереліти картоплі з мікробульб, що включає вирівнювання поля, підрізання, обертання та укладання шару грунту плугом у борозну, який відрізняється тим, що оранку проводять на глибину 28 - 30см в пізньоосінній період.
Попередній патент: Спосіб отримання компонента палив для повітряно-реактивних двигунів із сировини рослинного походження
Наступний патент: Спосіб криптографічного перетворення інформації
Випадковий патент: Трубчатий елемент парогенератора