Спосіб оперативного розв’язання множинних конфліктів повітряних кораблів
Номер патенту: 95750
Опубліковано: 12.01.2015
Автори: Лунека Віталій Васильович, Чепіженко Валерій Іванович, Астаф'єва Наталія Миколаївна, Мельник Ірина Геннадіївна
Формула / Реферат
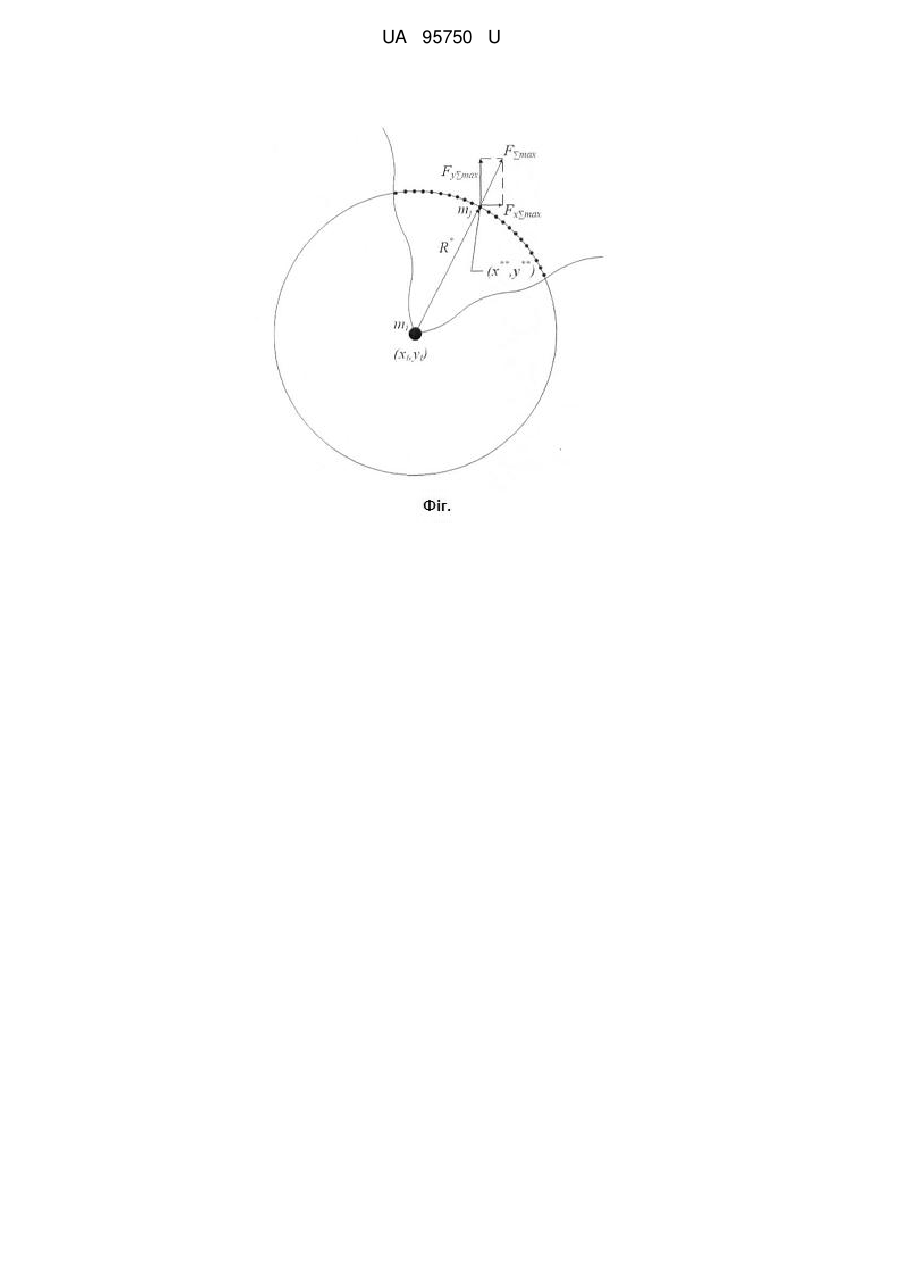
Спосіб оперативного розв'язання множинних конфліктів повітряних кораблів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих об'єктів між собою й з перешкодами, який відрізняється тим, що навколо матеріальної точки формують коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщують матеріальні точки, які наділені масою та взаємодіють з іншими матеріальними точками, з силами притягання івідштовхування, визначають позицію матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною.
Текст
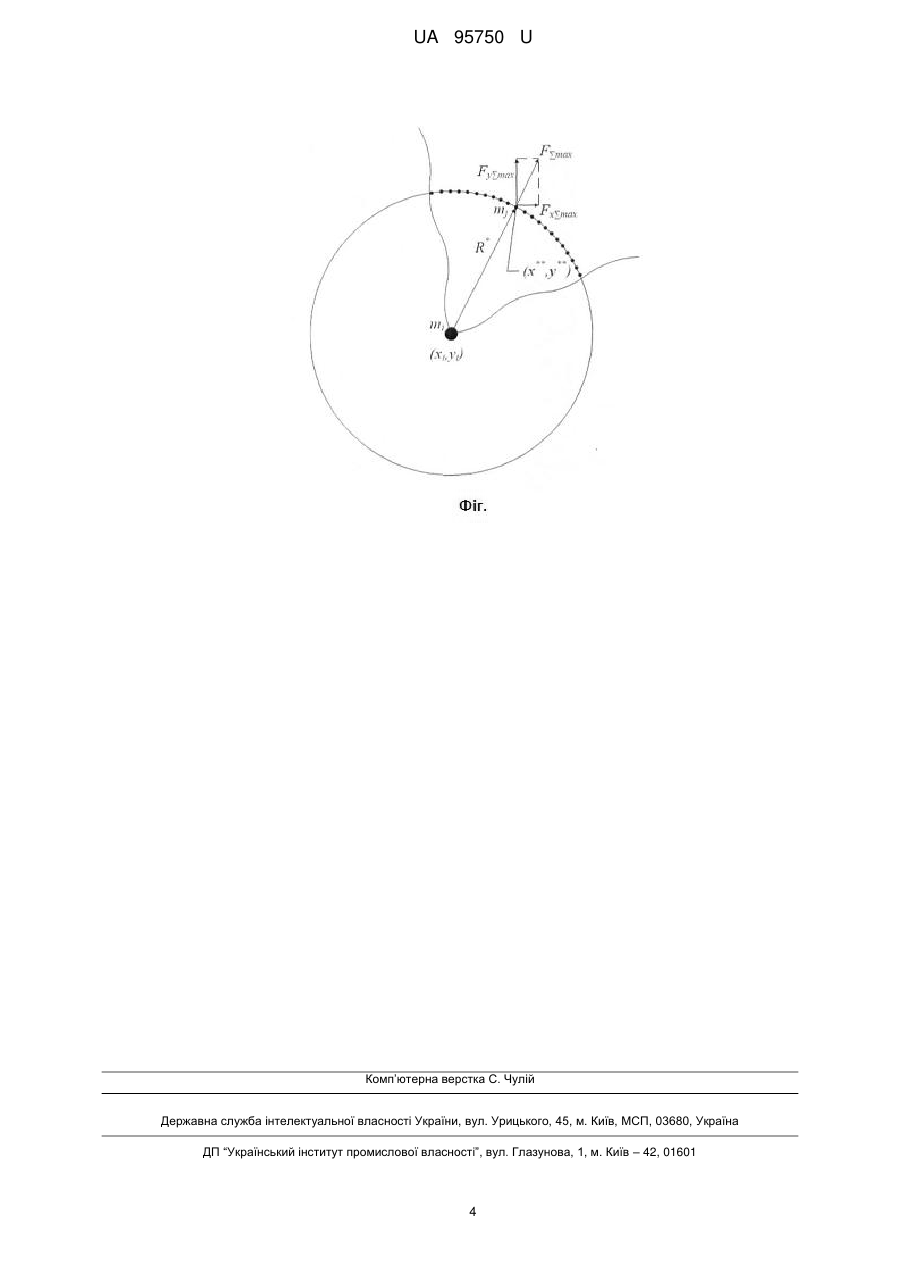
Реферат: Спосіб оперативного розв'язання множинних конфліктів повітряних кораблів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих об'єктів між собою й з перешкодами. Навколо матеріальної точки формують коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщують матеріальні точки, які наділені масою та взаємодіють з іншими матеріальними точками, з силами притягання і відштовхування, визначають позицію матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною. UA 95750 U (12) UA 95750 U UA 95750 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області керування об'єктами, а саме в більшій мірі до методів вирішення конфліктних ситуацій в конкретному просторі між рухомими об'єктами, також зіткнення рухомих об'єктів з різними перешкодами. Дана корисна модель до літальних апаратів, як пілотних та безпілотних. Найбільш відомим є спосіб розв'язання конфліктів зіткнення, що базується на використанні властивостей потенційних силових полів. Суть даного способу полягає в наступному. Всім рухомим об'єктам і їхнім перешкодам призначають потенціали одного знака, а цільовим позиціям рухомих об'єктів потенціали іншого знака. У результаті на кожний рухомий об'єкт діють сили притягання до своєї цілі та відштовхування від інших рухомих об'єктів і перешкод. Результуючу силу використовують для формування управління рухом об'єкта до цілі та для запобігання зіткнення з іншими рухомими об'єктами та з перешкодами. Відомий спосіб визначення альтернативного шляху для обходу перешкод мобільною машиною [1]. Спосіб полягає в визначенні місця розташування перешкод, призначенні заряду одного знаку для мобільної машини і перешкод, призначенні заряду іншого знаку для цільового пункту маршруту мобільної машини, обчисленні сумарної сили, що діє на мобільну машину з боку перешкод і цілі. Силу розраховують як функцію, що обернено пропорційна квадрату відстані між об'єктами. Вектор сумарної сили є керуючим сигналом для обходу мобільною машиною перешкод і руху до цільового пункту. Недоліками відомого способу визначення альтернативного шляху для обходу перешкод мобільною машиною є те, що сили притягання до цілі та відштовхування від перешкод є нелінійними функціями від відстані між об'єктами. Це призводить до того, що при зближенні рухомих об'єктів або при зближенні з ціллю необмежено зростає значення функції сумарної сили і прискорення мобільної машини на малих відстанях від перешкод і малих відстанях до цілі, що унеможливлює визначення функції управління мобільною машиною. Також відомим способом є спосіб кооперативного розв'язання конфліктів повітряного руху [2]. Спосіб полягає в тому, що повітряним судам і їхнім перешкодам призначають потенціали однакового знаку, а цільовим пунктам кожного повітряного судна призначаються потенціали протилежного знаку. Взаємне розташування всіх потенціалів формує потенціальне поле. Градієнт потенціального поля визначає напрямок і величину сили, що діє в точці положення кожного повітряного судна. На основі значення градієнта розраховують нове положення повітряного судна. Найбільш близьким технічним рішенням, вибраним за прототип, є спосіб гарантованого розв'язання поліконфліктів рухомих об'єктів [3]. Суть винаходу в способі гарантованого розв'язання поліконфліктів рухомих об'єктів, при якому в силовому полі розміщують позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім рухомим об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфліктів зіткнення рухомих об'єктів між собою й з перешкодами, полягає в тому, що створюється штучне силове поле у просторі поліконфліктних рухомих об'єктів, цим рухомим об'єктам, їхнім цілям, динамічним і статичним перешкодам призначають потенціали, що є одночасно функцією двох сил взаємодії: сил притягання й сил відштовхування. Суть винаходу також полягає в тому, що як управління для запобігання конфлікту зіткнення рухомих об'єктів використовують тільки кут повороту вектора швидкості рухомого об'єкта, що є функцією градієнта сумарних сил притягання та відштовхування, що діють на рухомий об'єкт із боку інших рухомих об'єктів, цілі та перешкод. Недоліки технічного рішення, вибраного за прототип: 1. При диференціюванні руху віртуального вимірювача необхідно враховувати напруженість віртуального силового поля, так як при різних значеннях напруженості силового поля віртуальний вимірювач буде мати різні характеристики руху, такі як добротність, ступінь затухання коливань та стійкість. 2. При потраплянні в область значень параметрів руху віртуального вимірювача зі значенням декрименту затухання близьким до 0 суттєво збільшується час для визначення сталого положення віртуального вимірювача. В основу корисної моделі поставлена задача забезпечення оперативного розв'язання множинних конфліктів шляхом виключення (усунення) недоліків прототипу. Поставлена задача вирішується тим, що у способі оперативного розв'язання множинних конфліктів повітряних кораблів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих 1 UA 95750 U 5 10 об'єктів між собою й з перешкодами згідно з корисною моделлю навколо матеріальної точки формують коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщують матеріальні точки, які наділені масою та взаємодіють з іншими матеріальними точками, з силами притягання і відштовхування, визначають позицію матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною. Спосіб оперативного розв'язання множинних конфліктів повітряних кораблів реалізують в такий спосіб. 1. Кожний рухомий об'єкт формалізують кінематичною моделлю виду: q f V, , , q , q0 t 0 Q0 , qк t к Qк , V 0...Vmax , 0...360 , , 15 20 25 30 де q - вектор координат рухомого об'єкту; q0 , qк - вектори початкових і кінцевих значень координат відповідно; V - вектор шляхової швидкості рухомого об'єкта; - курсовий кут, який здійснює управління орієнтацією вектору шляхової швидкості рухомого об'єкту; - мале заздалегідь задане число; Q0 - множина початкових позицій рухомого об'єкту; Qк - множина його кінцевих позицій. Кінематичні властивості рухомих об'єктів визначають їх енергетичними, технікоекономічними та параметричними характеристиками, а також фізико-механічними властивостями навігаційного середовища. 2. Курсовий кут в моделі (1) забезпечує гарантоване розв'язання конфлікту зіткнення рухомих об'єктів між собою, з перешкодами і обмеженнями, а також характеризує напрямок вектору швидкості на ціль. 3. З метою визначення формують віртуальний світ. Кожний рухомий об'єкт віртуального світу представляють матеріальною точкою, яку наділяють масою m . Перешкоди і обмеження також представляють матеріальними точками, або їх сукупністю (якщо геометрія перешкод і обмежень є складною) і також наділяють масами. Об'єкти можуть мати різні пріоритети, що обумовлюється різними значеннями їх "характеристичної маси". Фінішні позиції кожного рухомого об'єкта наділяють масами, що значно перевершують масу самого об'єкта. Матеріальні точки з масами m взаємодіють між собою одночасними силами притягання F і відштовхування W: FG 35 40 qm n R ; W G qmR кр Rm (2) , де R - відстань між матеріальними точками; Rкр - критичне значення відстані між матеріальними точками, яке визначається виходячи із умов безпеки і безконфліктності руху об'єктів в навігаційному середовищі; G - гравітаційна постійна віртуального світу. У виразах (2) відношенням n m задають "агрегатний" стан середовища у віртуальному світі що характеризує ступінь самоорганізації елементів віртуального світу. Аналогією "агрегатного" стану середовища у віртуальному світі може служити агрегатний стан матерії в реальному світі - газоподібний, рідкий, кристалічний і т.ін. 4. Навколо матеріальної точки формують коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщують матеріальні точки, які наділені масою m j та взаємодіють з іншими матеріальними точками, з силами притягання і відштовхування, визначається позиція матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною (див. Фіг.). F Gm im j Rn ij F F j F j F 45 (1) , Gm im j Rкрi Rкрj Rm ij (3) де j - кількість матеріальних точок наділених масою. 1: 360 х х і R cos і 2 UA 95750 U y y і R sin і 5 max F х , y . і і Ця позиція є основою для розрахунків керуючого впливу для запобігання конфлікту зіткнення рухомих об'єктів. 5. Відповідно до геометричного розташування всіх матеріальних точок віртуального світу, кутове положення вектору F max буде відповідати градієнту гравітаційного поля. Це кутове положення, яке відповідає куту знаходиться за формулою (4) arctg 10 15 20 25 30 y i y і (4) . Порівняльний аналіз технічного рішення, що заявляється, із прототипом, дозволяє зробити висновок, що спосіб оперативного розв'язання множинних конфліктів повітряних кораблів відрізняється тим, що замість віртуальних вимірювачів, які задаються моделлю дисипуючого осцилятора, навколо матеріальної точки формується коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщуються матеріальні точки, які наділені масою та взаємодіють з іншими матеріальними точками, з силами притягання і відштовхування, визначається позиція матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною. Ця позиція є основою для розрахунків керуючого впливу для запобігання конфлікту зіткнення рухомих об'єктів. Підвищення ефективності використання технічного рішення, що заявляється, у порівнянні із прототипом, полягає в тому, що: 1. Забезпечується гарантоване розв'язання множинних конфліктів повітряних кораблів у віртуальному світі при довільному початковому розташуванню об'єкта. 2. При відповідному виборі значень мас рухомих об'єктів, їхніх цілей і перешкод зберігається повна цільова керованість рухомих об'єктів. 3. Не відбувається необмежене зростання складності обчислення нових координат рухомих об'єктів при зростанні кількості конфліктів. 4. Управління швидкістю матеріальних точок здійснюється незалежно від управління кутового положення їх вектора швидкості. Швидкість рухомих об'єктів може вибиратися довільно. Джерела інформації: 1. Патент США № US6134502, МПК G06F 9/00, G06N 7/00, 2000 (аналог). 2. Патент США № US5961568, МПК G08G 5/04, 1999 (аналог). 3. Патент Україна № 79905, МПК G08G 5/00, G06F 9/00, G05D 1/00 G06N 7/00 (прототип). x i х і ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 Спосіб оперативного розв'язання множинних конфліктів повітряних кораблів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих об'єктів між собою й з перешкодами, який відрізняється тим, що навколо матеріальної точки формують коло з центром, який співпадає з координатами місцезнаходження матеріальної точки у віртуальному світі, на колі послідовно розміщують матеріальні точки, які наділені масою та взаємодіють з іншими матеріальними точками, з силами притягання і відштовхування, визначають позицію матеріальної точки на колі, в якій сумарна сила, яка є сумою сили притягання і відштовхування від інших матеріальних точок, є максимальною. 3 UA 95750 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюChepizhenko Valerii Ivanovych
Автори російськоюЧепиженко Валерий Иванович
МПК / Мітки
МПК: G06F 9/00, G06N 7/00, G08G 5/00, G05D 1/00
Мітки: оперативного, розв'язання, кораблів, конфліктів, спосіб, повітряних, множинних
Код посилання
<a href="https://ua.patents.su/6-95750-sposib-operativnogo-rozvyazannya-mnozhinnikh-konfliktiv-povitryanikh-korabliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб оперативного розв’язання множинних конфліктів повітряних кораблів</a>
Спосіб дренажування паливних баків повітряних кораблів
Номер патенту: 34310
Опубліковано: 15.02.2001
Автори: Бойченко Сергій Валерійович, Єфіменко Валерій Володимирович
МПК: B64D 37/00
Мітки: дренажування, паливних, спосіб, кораблів, повітряних, баків
Текст:
...Спосіб працює таким чином. Під час заправки паливних баків 1, паливоповітряна суміш по дре нажних трубопроводах 2 поступає в дренажний бак 3, в якому розташовано сорбент 4, що поглинає пари палива. Повітря, очищене від вуглеводнів, через повітрозабірники 5, а у разі обмерзання останніх, через запобіжні клапани 6 надходить до атмосфери. По мірі вироблення палива з баків 1, під час польоту, повітря надходить через повітрозабірники 5 в...
Спосіб гарантованого розв’язання поліконфліктів рухомих об’єктів
Номер патенту: 72905
Опубліковано: 27.08.2012
Автори: Чепіженко Валерій Іванович, Павлова Світлана Вадимівна, Харченко Володимир Петрович, Павлов Вадим Володимирович
МПК: G06F 9/00, G08G 5/00, G06N 7/00, G05D 1/00
Мітки: рухомих, розв'язання, об'єктів, поліконфліктів, спосіб, гарантованого
Формула / Реферат:
1. Спосіб гарантованого розв'язання поліконфліктів рухомих об'єктів, при якому в силовому полі розміщають позиції рухомих об'єктів, позиції цілей, пов'язаних з рухомими об'єктами, а також позиції перешкод, всім об'єктам, їхнім цілям і перешкодам призначають потенціали, розраховують сили, що діють на рухомі об'єкти, і на основі цих сил розраховують керуючі впливи для запобігання конфлікту зіткнення рухомих об'єктів між собою й з перешкодами,...
Способи і пристрій для розв’язання конфліктів коду пілотних псевдовипадкових перешкод в системі зв’язку
Номер патенту: 93968
Опубліковано: 25.03.2011
Автори: Даял Пранав, Улупінар Фатіх, Горохов Алєксєй, Пракаш Раджат
МПК: H04B 3/54, H04Q 5/00, H04L 5/00
Мітки: системі, зв'язку, способи, розв'язання, перешкод, псевдовипадкових, пілотних, коду, пристрій, конфліктів
Формула / Реферат:
1. Спосіб виділення кодів PilotPN в системі зв'язку, причому спосіб включає етапи, на яких:визначають (502) набір з множини точок доступу;визначають (504) набір кодів PilotPN, що використовуються набором з множини точок доступу;виявляють (506), чи мають щонайменше дві точки доступу з множини точок доступу конфліктуючі коди PilotPN;виділяють (508) перший код PilotPN однієї з щонайменше двох точок доступу, що мають...
Сполука, яка модулює активність кіназного білка множинних ліній, та спосіб її ідентифікації, спосіб модулювання активності кіназного білка множинних ліній (варіанти)
Номер патенту: 74772
Опубліковано: 15.02.2006
Автори: Гліксман Марсі А., Нефф Нікола, Уолтон Кевін М., Дайонн Крейг А., Найт Ернест мол., Мероні Анна
МПК: G01N 33/68, G01N 33/50, A61K 31/5395, C07D 487/14, C12Q 1/02, A61P 29/00, C12Q 1/48, A61P 25/28, G01N 33/15, A61K 31/407, G01N 33/566, C07D 491/22, G01N 33/53, C12N 9/12
Мітки: варіанти, яка, білка, множинних, ідентифікації, активності, активність, спосіб, кіназного, ліній, модулювання, модулює, сполука
Формула / Реферат:
1. Спосіб ідентифікації сполуки, яка модулює активність кіназного білка множинних ліній і підвищує виживаність клітин або загибель клітин, що включає наступні етапи:(a) контактування вказаної клітини або клітинного екстракту, що містить вказаний кіназний білок множинних ліній, з вказаною сполукою;(b) визначення того, чи впливає вказана сполука на активність вказаного кіназного білка множинних ліній; і(c) визначення того,...
Спосіб запобігання загибелі та піднімання затоплених підводних кораблів
Номер патенту: 63165
Опубліковано: 15.01.2004
Автори: Алєксєєв Станіслав Георгієвич, Вершинін Валерій Афанасійович, Зорін Андрій Микитович
МПК: B63C 7/08
Мітки: запобігання, загибелі, спосіб, піднімання, затоплених, кораблів, підводних
Формула / Реферат:
Спосіб запобігання загибелі і піднімання затоплених підводних кораблів, що включає надпалубне остроплювання балонів до затопленого корабля і їх наповнення повітрям, який відрізняється тим, що балони у складеному стані розміщують між стінками внутрішнього і зовнішнього корпусів підводного корабля з урахуванням розподілу його ваги та водотонажності, причому балони з'єднують з індивідуальним джерелом стиснутого газу через керований клапан, який...