Спосіб дистанційного визначення рівня морської поверхні
Номер патенту: 98906
Опубліковано: 25.06.2012
Автори: Пустовойтенко Володимир Володимирович, Запевалов Олександр Сергійович
Формула / Реферат
Спосіб дистанційного визначення рівня морської поверхні, який полягає в тому, що формують короткі радіоімпульси постійної тривалості, опромінюють морську поверхню в надир, реєструють відображений радіоімпульс і визначають значущу висоту хвиль, з урахуванням якої розрахунковим шляхом визначають відстань від джерела опромінювання до рівня незбуреної морської поверхні, який відрізняється тим, що морську поверхню додатково опромінюють при ненульових кутах падіння і визначають швидкість приводного вітру, за якою розраховують довжину і фазову швидкість домінантних хвиль, за якими визначають асиметрію і ексцес розподілу піднесень морської поверхні, які враховують при визначенні відстані від джерела опромінювання до рівня незбуреної морської поверхні.
Текст
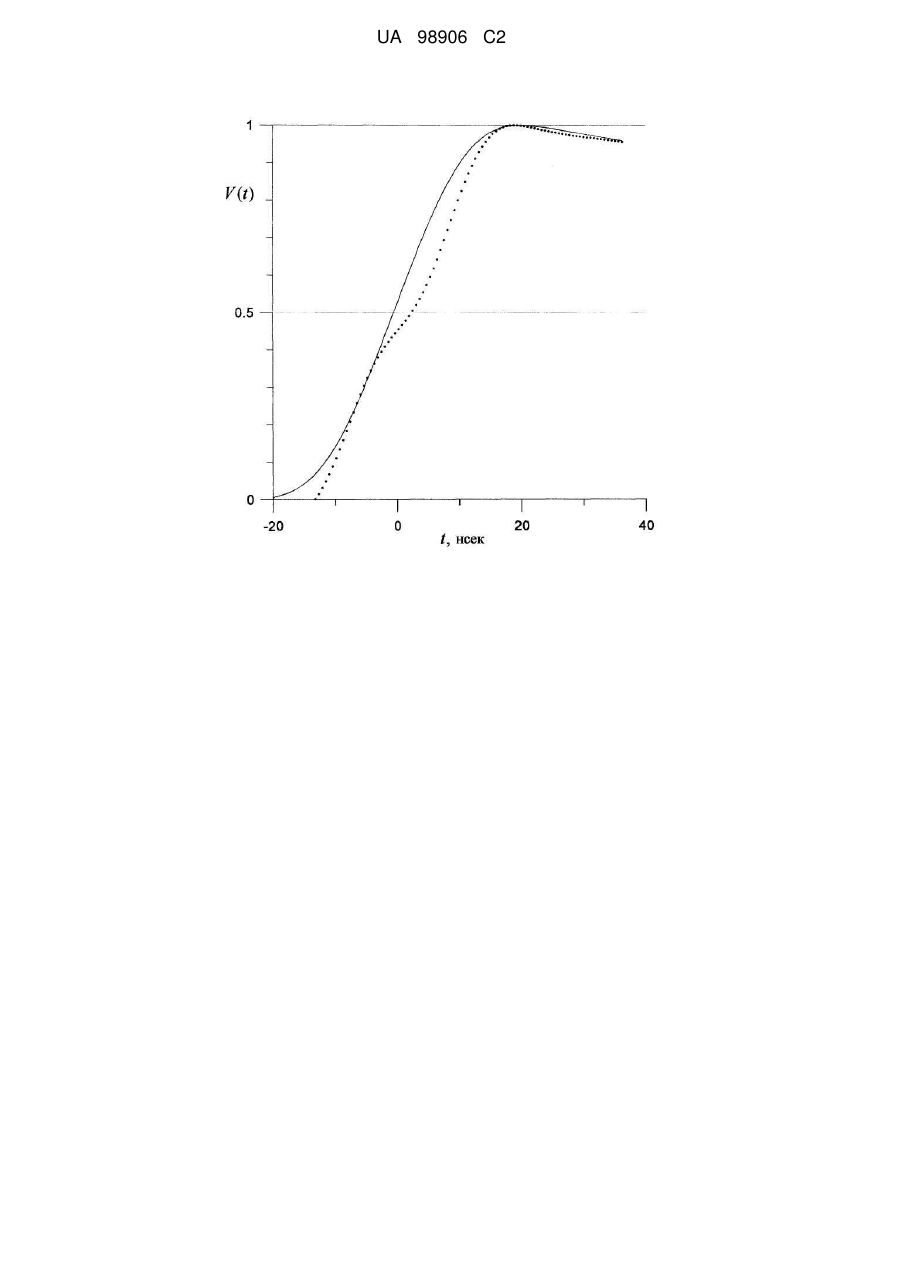
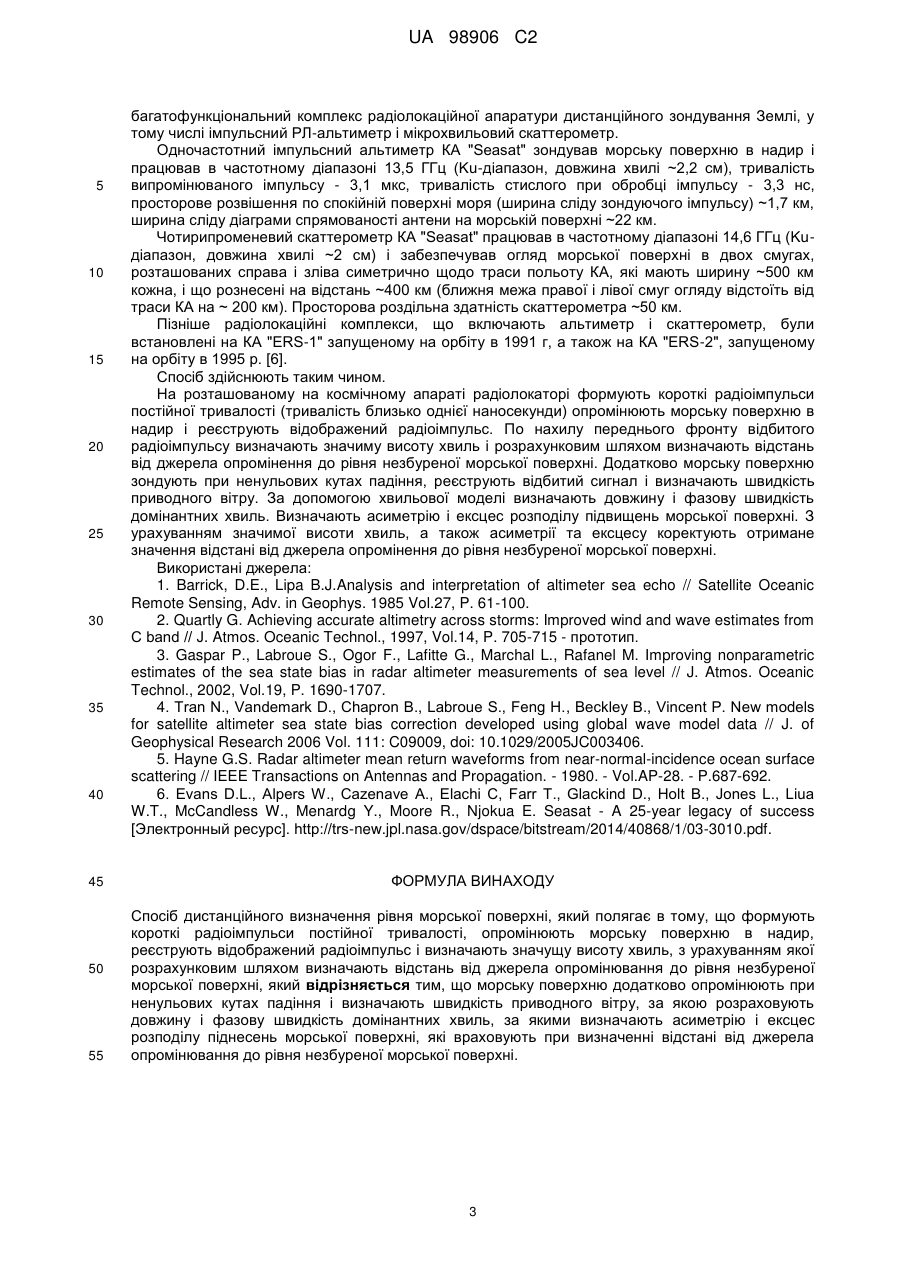
Реферат: Винахід належить до галузі океанографічних вимірювань і призначений переважно для визначення рівня морської поверхні уздовж траси космічного апарата. Технічний результат підвищення точності визначення рівня морської поверхні за рахунок збільшення числа визначуваних параметрів, що характеризують стан водної поверхні. Спосіб дистанційного визначення рівня морської поверхні полягає в тому, що на розташованому на космічному апараті радіолокаторі формують короткі радіоімпульси постійної тривалості, опромінюють морську поверхню в надир і реєструють відбитий радіоімпульс. По нахилу переднього фронту відбитого радіоімпульсу визначають значиму висоту хвиль і розрахунковим шляхом визначають відстань від джерела опромінювання до рівня незбуреної морської поверхні. Додатково морську поверхню зондують при ненульових кутах падіння, реєструють відбитий сигнал і визначають швидкість приводного вітру. За допомогою хвильової моделі визначають довжину і фазову швидкість домінантних хвиль. Визначають асиметрію і ексцес розподілу піднесень морської поверхні. З урахуванням значимої висоти хвиль, а також асиметрії та ексцесу коректують отримане значення відстані від джерела опромінення до рівня незбуреної морської поверхні. UA 98906 C2 (12) UA 98906 C2 UA 98906 C2 5 10 15 20 25 30 35 Винахід належить до галузі океанографічних вимірювань і призначений переважно для визначення рівня морської поверхні уздовж траси космічного апарата. Відомий спосіб [1] визначення рівня морської поверхні за допомогою радіолокаційного альтиметра, встановленого на борту космічного апарата, згідно з яким, здійснюють зондування поверхні моря короткими імпульсами тривалістю порядку декількох наносекунд. Схожими з ознаками заявленого рішення є такі ознаки аналога: формування коротких радіоімпульсів постійної тривалості, опромінювання морської поверхні і реєстрація відбитого радіоімпульсу. Та обставина, що в процесі вимірювань не враховується вплив стану морської поверхні на форму відбитого радіоімпульсу, обумовлює недостатню точність вимірювань. Найближчим до винаходу по сукупності ознак, і тому вибраним як прототип, є дистанційний спосіб [2] визначення рівня морської поверхні, заснований на використовуванні характеристик радіосигналу, одержуваного при зондуванні поверхні моря в надир за допомогою встановленого на борту космічного апарата (TOPEX/Poseidon, запущеного в 1992 році) радіолокаційного альтиметра, що працює на частоті 5.3 ГГц. По міжнародній класифікації ця частота відповідає С-діапазону радіохвиль (сантиметрові довжини хвиль). Ознаки прототипу, що співпадають з суттєвими ознаками заявленого винаходу: формування коротких радіоімпульсів постійної тривалості, опромінювання морської поверхні в надир, реєстрація відбитого радіоімпульсу і визначення значимої висоти хвиль, з урахуванням якої розрахунковим шляхом визначають відстань від джерела опромінювання до рівня незбуреної морської поверхні. Недолік прототипу полягає в невисокій точності визначення рівня моря. Помилки визначення рівня морської поверхні, обумовлені зміною стану моря, лежать в межах від декількох сантиметрів до декількох дециметрів [3]. Щоб мати спроможність ефективно використовувати дані альтиметричних вимірювань, їх похибка повинна складати декілька сантиметрів [4]. В основу винаходу поставлена задача створення способу дистанційного визначення рівня морської поверхні, в якому за рахунок збільшення числа визначених параметрів, що характеризують стан водної поверхні, досягається технічний результат - підвищення точності визначення рівня морської поверхні. Точність дистанційного визначення характеристик морської поверхні, у тому числі її рельєфу, обмежена неоднозначністю зв'язку між реєстрованим сигналом встановленого на космічному апараті радіолокатора і визначеними характеристиками. Це означає, що рішення таких проблем, як поліпшення технічних характеристик радіолокатора, зменшення похибки, пов'язаної з проходженням радіохвиль через атмосферу, впровадження оптимальних алгоритмів отримання миттєвих оцінок висоти і їх згладжування у принципі не дозволяє підняти точність вище за деяку межу. Необхідно розширювати круг визначуваних параметрів морської поверхні. Суть заявленого технічного рішення пояснюється наступним. Для розміщених на космічних апаратах альтиметрів форма відбитого від плоскої поверхні імпульсу має вигляд 4c 4c PFS ( t ) A exp cos( 2)t I0 2 sin 2 (2)t H( t ) , h 2h 40 де A -амплітуда; c - швидкість світла; - ширина променя антени; h - висота космічного апарата щодо рівня незбуреної морської поверхні; - абсолютне значення кута падіння, I0 модифікована функція Бесселя першого роду; H(t) - одинична функція Хевісайда. Форму зондуючого імпульсу звичайно задають як гауссову t2 , exp 2D 2Dr r де параметр D r визначає ширину радіоімпульсу. sr ( t ) 45 (1) 1 (2) При вертикальному зондуванні ( 0) форму відбитого від збуреної морської поверхні радіоімпульсу можна описати як [5], V( t ) a d exp d 0 C( t ) , 6 2 (3) де 0 t t 0 d (4) D 1 UA 98906 C2 d ln 4 c D; 2 ( / 2) h sin (5) C C0 E (D / D)2 C1 A 2 (D / D)3 C2 ; (6) 0 z2 dz ; (7) ( 0 z)n 6 A (D / D)3 / 2 H3 ( z d) exp 2 2 0 z2 1 n (8) C1 (0 z) H4 (z d) exp 2 dz ; 2 0 z2 1 n (9) C2 (0 z) H6 (z d) exp 2 dz , 2 де: D D Dr ; - ширина променя антени, визначена по рівню половинної потужності; D , 1 C0 A і E - відповідно дисперсія, асиметрія і ексцес піднесень морської поверхні; Hn - поліноми 5 Чебишева-Ерміта, порядок яких вказаний індексом n. Нелінійні ефекти в полі поверхневих хвиль призводять до відхилення асиметрії і ексцесу розподілу піднесень морської поверхні від нульових значень. Це, як показано на ілюстрації, у свою чергу приводить до зміни форми переднього фронту відбитого імпульсу. Тут суцільна крива відповідає формі відбитого радіоімпульсу, розрахованій при A 0.05 , E 0.2 і D 1.25 м, пунктирна крива розрахована при A 0.4 , E 0.2 і 10 15 D 1.25 м. Видно, що зміна асиметрії розподілу піднесень морської поверхні призводить до зсуву середньої точки переднього фронту відбитого радіоімпульсу, по якій розраховується час його повернення і відповідно відстань від космічного апарата до морської поверхні. Форма відбитого радіоімпульсу також міняється при зміні ексцесу E . Таким чином, точність визначення рівня морської поверхні буде підвищена, якщо відомі асиметрія і ексцес піднесень схвильованої поверхні і значення цих параметрів будуть враховані при визначенні часу реєстрації відбитого імпульсу. Альтиметричні вимірювання не дозволяють безпосередньо заміряти асиметрію A і ексцес E , їх можна оцінити, знаючи параметри, що визначають нелінійність хвильового поля. Таким параметром є стадія розвитку хвильового поля, яку прийнято характеризувати зворотним віком хвиль 20 30 35 (10) де W10 - швидкість приводного вітру на висоті 10 м; C0 - фазова швидкість домінантних (енергонесучих) хвиль. Або нелінійність хвильового поля характеризують середнім ухилом 25 W10 , C0 D 0 (11) , де 0 - с довжина домінантних хвиль. Фазова швидкість і довжина домінантних хвиль за даними альтиметричних вимірювань не визначаються, їх можна оцінити за допомогою моделей поля поверхневих хвиль, вхідними даними для яких є поле вітру. Альтиметр дозволяє визначати швидкість вітру уздовж траси космічного апарата тільки у вузькій смузі, ширина якої не перевищує 20 км. Він не дозволяє визначати напрям вітру. Даних, одержуваних з альтиметра, недостатньо, щоб за допомогою моделі побудувати поле поверхневих хвиль. Тому необхідно додатково використовувати дані скаттерометричних вимірювань. Ширина смуги, в якій визначаються швидкість і напрям вітру, складає декілька сотень кілометрів. Для реалізації запропонованого способу може бути використаний комплекс апаратури, встановлюваної на океанографічних супутниках. Першим океанографічним космічним апаратом (КА), оснащеним одночасно радіоальтиметром і скаттерометром, став КА "Seasat" [6], запущений на орбіту ШСЗ 26 червня 1978 р. і що пропрацював на ній до 10 жовтня 1978 р. На борту КА був встановлений 2 UA 98906 C2 5 10 15 20 25 30 35 40 45 50 55 багатофункціональний комплекс радіолокаційної апаратури дистанційного зондування Землі, у тому числі імпульсний РЛ-альтиметр і мікрохвильовий скаттерометр. Одночастотний імпульсний альтиметр КА "Seasat" зондував морську поверхню в надир і працював в частотному діапазоні 13,5 ГГц (Ku-діапазон, довжина хвилі ~2,2 см), тривалість випромінюваного імпульсу - 3,1 мкс, тривалість стислого при обробці імпульсу - 3,3 нс, просторове розвішення по спокійній поверхні моря (ширина сліду зондуючого імпульсу) ~1,7 км, ширина сліду діаграми спрямованості антени на морській поверхні ~22 км. Чотирипроменевий скаттерометр КА "Seasat" працював в частотному діапазоні 14,6 ГГц (Kuдіапазон, довжина хвилі ~2 см) і забезпечував огляд морської поверхні в двох смугах, розташованих справа і зліва симетрично щодо траси польоту КА, які мають ширину ~500 км кожна, і що рознесені на відстань ~400 км (ближня межа правої і лівої смуг огляду відстоїть від траси КА на ~ 200 км). Просторова роздільна здатність скаттерометра ~50 км. Пізніше радіолокаційні комплекси, що включають альтиметр і скаттерометр, були встановлені на КА "ERS-1" запущеному на орбіту в 1991 г, а також на КА "ERS-2", запущеному на орбіту в 1995 р. [6]. Спосіб здійснюють таким чином. На розташованому на космічному апараті радіолокаторі формують короткі радіоімпульси постійної тривалості (тривалість близько однієї наносекунди) опромінюють морську поверхню в надир і реєструють відображений радіоімпульс. По нахилу переднього фронту відбитого радіоімпульсу визначають значиму висоту хвиль і розрахунковим шляхом визначають відстань від джерела опромінення до рівня незбуреної морської поверхні. Додатково морську поверхню зондують при ненульових кутах падіння, реєструють відбитий сигнал і визначають швидкість приводного вітру. За допомогою хвильової моделі визначають довжину і фазову швидкість домінантних хвиль. Визначають асиметрію і ексцес розподілу підвищень морської поверхні. З урахуванням значимої висоти хвиль, а також асиметрії та ексцесу коректують отримане значення відстані від джерела опромінення до рівня незбуреної морської поверхні. Використані джерела: 1. Barrick, D.E., Lipa B.J.Analysis and interpretation of altimeter sea echo // Satellite Oceanic Remote Sensing, Adv. in Geophys. 1985 Vol.27, P. 61-100. 2. Quartly G. Achieving accurate altimetry across storms: Improved wind and wave estimates from С band // J. Atmos. Oceanic Technol., 1997, Vol.14, P. 705-715 - прототип. 3. Gaspar P., Labroue S., Ogor F., Lafitte G., Marchal L., Rafanel M. Improving nonparametric estimates of the sea state bias in radar altimeter measurements of sea level // J. Atmos. Oceanic Technol., 2002, Vol.19, P. 1690-1707. 4. Tran N., Vandemark D., Chapron В., Labroue S., Feng H., Beckley В., Vincent P. New models for satellite altimeter sea state bias correction developed using global wave model data // J. of Geophysical Research 2006 Vol. 111: C09009, doi: 10.1029/2005JC003406. 5. Hayne G.S. Radar altimeter mean return waveforms from near-normal-incidence ocean surface scattering // IEEE Transactions on Antennas and Propagation. - 1980. - Vol.AP-28. - P.687-692. 6. Evans D.L., Alpers W., Cazenave A., Elachi C, Farr Т., Glackind D., Holt В., Jones L., Liua W.T., McCandless W., Menardg Y., Moore R., Njokua E. Seasat - A 25-year legacy of success [Электронный ресурс]. http://trs-new.jpl.nasa.gov/dspace/bitstream/2014/40868/1/03-3010.pdf. ФОРМУЛА ВИНАХОДУ Спосіб дистанційного визначення рівня морської поверхні, який полягає в тому, що формують короткі радіоімпульси постійної тривалості, опромінюють морську поверхню в надир, реєструють відображений радіоімпульс і визначають значущу висоту хвиль, з урахуванням якої розрахунковим шляхом визначають відстань від джерела опромінювання до рівня незбуреної морської поверхні, який відрізняється тим, що морську поверхню додатково опромінюють при ненульових кутах падіння і визначають швидкість приводного вітру, за якою розраховують довжину і фазову швидкість домінантних хвиль, за якими визначають асиметрію і ексцес розподілу піднесень морської поверхні, які враховують при визначенні відстані від джерела опромінювання до рівня незбуреної морської поверхні. 3 UA 98906 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for remote determination of the sea surface level
Автори англійськоюZapevalov Oleksandr Serhiiovych, Pustovoitenko Volodymyr Volodymyrovych
Назва патенту російськоюСпособ дистанционного определения уровня морской поверхности
Автори російськоюЗапевалов Александр Сергеевич, Пустовойтенко Владимир Владимирович
МПК / Мітки
МПК: G01S 13/95
Мітки: дистанційного, морської, поверхні, спосіб, рівня, визначення
Код посилання
<a href="https://ua.patents.su/6-98906-sposib-distancijjnogo-viznachennya-rivnya-morsko-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного визначення рівня морської поверхні</a>
Спосіб дистанційного визначення характеристик морської поверхні
Номер патенту: 98193
Опубліковано: 25.04.2012
Автори: Пустовойтенко Володимир Володимирович, Запевалов Олександр Сергійович
МПК: G01S 17/00, G01J 3/44, G01V 8/00
Мітки: спосіб, характеристик, поверхні, дистанційного, визначення, морської
Формула / Реферат:
Спосіб дистанційного визначення характеристик морської поверхні, який полягає в тому, що формують короткі радіоімпульси постійної тривалості, вертикально зондують ними морську поверхню, реєструють відбиті радіоімпульси і за їх формою визначають характеристики морської поверхні, який відрізняється тим, що додатково формують більш довгі радіоімпульси і вертикально зондують ними морську поверхню, при цьому тривалість додатково сформованих...
Спосіб радіолокаційного визначення забруднення морської поверхні
Номер патенту: 92845
Опубліковано: 10.12.2010
Автори: Пустовойтенко Володимир Володимирович, Станічний Сергій Володимирович, Запевалов Олександр Сергійович
МПК: G01C 13/00
Мітки: забруднення, спосіб, визначення, морської, радіолокаційного, поверхні
Формула / Реферат:
Спосіб радіолокаційного визначення забруднення морської поверхні, який полягає в тому, що контрольовану область поверхні опромінюють під азимутним кутом α1, реєструють розсіяний назад сигнал і по зміні рівня сигналу виявляють аномальну ділянку поверхні, від якої розсіяний назад сигнал має нижчий рівень в порівнянні з фоновим значенням сигналу, який відрізняється тим, що контрольовану область додатково опромінюють під азимутним кутом...
Спосіб радіолокаційного визначення забруднення морської поверхні нафтою або іншими поверхнево-активними речовинами
Номер патенту: 87381
Опубліковано: 10.07.2009
Автори: Запевалов Олександр Сергійович, Ролік Наталя Миколаївна
МПК: G01S 13/88, G01C 13/00
Мітки: морської, поверхнево-активними, речовинами, забруднення, спосіб, іншими, поверхні, нафтою, визначення, радіолокаційного
Формула / Реферат:
Спосіб радіолокаційного визначення забруднення морської поверхні нафтою або іншими поверхнево-активними речовинами, який полягає в тому, що контрольовану ділянку морської поверхні опромінюють одночасно радіохвилями різної довжини одного типу поляризації під кутом падіння, при якому зворотне розсіювання сигналів має резонансний характер, реєструють ці сигнали тієї ж поляризації, по них обчислюють значення спектра поверхневих хвиль на довжині...
Спосіб дистанційного визначення забруднення поверхні відкритих водоймищ
Номер патенту: 75804
Опубліковано: 15.05.2006
Автор: Запевалов Олександр Сергійович
МПК: G01C 13/00, G01V 3/12
Мітки: спосіб, відкритих, визначення, дистанційного, поверхні, водоймищ, забруднення
Формула / Реферат:
Спосіб дистанційного визначення забруднення поверхні відкритих водоймищ, який полягає у тому, що поверхню опромінюють лазерним променем, реєструють відблиски дзеркального відображення та визначають їх характеристики, який відрізняється тим, що одночасно з реєстрацією відблисків вимірюють швидкість вітру, а рівень забруднення визначають шляхом порівняння отриманих характеристик відблисків із зразковими значеннями для виміряної швидкості...
Спосіб визначення рельєфу та рівня поверхні матеріалів
Номер патенту: 31522
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01B 15/00, G01F 23/28
Мітки: рельєфу, матеріалів, спосіб, визначення, поверхні, рівня
Текст:
...17.,.20, І відповідають умові стрибкоподібної зміни температури. Така уме аиникас в зоні стикуванняt контрольованої поверхні 1 зі стінками колосники г тобто в шуканих точках 13.. Л 6. Попередні значення координат додаткових точок поверхні площинах 21 і 22 задають у відповідності з типовими розрахункова профілями 23 і 24 поверхні, причому ці профілі суміщують попередньо визначеними точками відповідно 15, 8, 16 і 13, 9, Додаткові...
Попередній патент: Спосіб одержання багатошарового смуги з порошків різного хімічного складу
Наступний патент: Пристрій для підведення газу в металургійну ємність
Випадковий патент: Пристрій для утримання колеса рулетки