Спосіб вимірювання дальності
Номер патенту: 104437
Опубліковано: 10.02.2014
Формула / Реферат
Спосіб вимірювання дальності, що включає генерування безперервних низькочастотних коливань, генерування безперервних високочастотних коливань, зсув частоти цих безперервних високочастотних коливань за допомогою керованого фазообертача, зсув вихідних і трансформованих по частоті безперервних високочастотних коливань, виділення комбінаційної складової різниці, управління частотою безперервних високочастотних коливань по заданому алгоритму, безперервним вимірюванням різниці фаз між вихідним безперервним низькочастотним сигналом і виділеної комбінаційної складової різниці і за результатами управління частотою і фіксацією різниць фаз обчисленням дальності за формулою
![]() ,
,
яка відрізняється тим, що все вимірювальне обладнання розміщують в одному місці - у вимірювальній станції, при цьому здійснюють розділення сигналу високочастотного генератора на два канали, при цьому в одному каналі безперервні високочастотні коливання з відомою фіксованою частотою ![]() подають на керований фазообертач, де в ці безперервні високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією управляючого сигналу, з частотою
подають на керований фазообертач, де в ці безперервні високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією управляючого сигналу, з частотою ![]() від низькочастотного високостабільного генератора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою
від низькочастотного високостабільного генератора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою ![]() подають на високочастотний змішувач, при цьому в другому каналі отриманими безперервними високочастотними коливаннями здійснюють модуляцію інтенсивності сигналу джерела оптичного когерентного випромінювання, після чого здійснюють випромінювання оптичних когерентних коливань, модульованих по амплітуді у напрямі об'єкта, дальність якого необхідно вимірювати, після чого відбитий від об'єкта оптичний сигнал приймають приймачем оптичного когерентного випромінювання, де здійснюють демодуляцію оптичного сигналу і виділяють огинаючу оптичного когерентного випромінювання, частота якої дорівнює частоті вихідних безперервних високочастотних коливань, а фаза цієї огинаючої містить інформацію про дальність об'єкта, після чого сигнал огинаючої подають на змішувач, де ці високочастотні коливання огинаючої змішують з трансформованими по частоті безперервними високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці
подають на високочастотний змішувач, при цьому в другому каналі отриманими безперервними високочастотними коливаннями здійснюють модуляцію інтенсивності сигналу джерела оптичного когерентного випромінювання, після чого здійснюють випромінювання оптичних когерентних коливань, модульованих по амплітуді у напрямі об'єкта, дальність якого необхідно вимірювати, після чого відбитий від об'єкта оптичний сигнал приймають приймачем оптичного когерентного випромінювання, де здійснюють демодуляцію оптичного сигналу і виділяють огинаючу оптичного когерентного випромінювання, частота якої дорівнює частоті вихідних безперервних високочастотних коливань, а фаза цієї огинаючої містить інформацію про дальність об'єкта, після чого сигнал огинаючої подають на змішувач, де ці високочастотні коливання огинаючої змішують з трансформованими по частоті безперервними високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці ![]() трансформованих по частоті безперервних високочастотних коливань і що демодулюються в приймачі оптичного когерентного випромінювання безперервних високочастотних коливань огинаючої, після чого у фазовому детекторі вимірюють і фіксують різницю фаз
трансформованих по частоті безперервних високочастотних коливань і що демодулюються в приймачі оптичного когерентного випромінювання безперервних високочастотних коливань огинаючої, після чого у фазовому детекторі вимірюють і фіксують різницю фаз ![]() між цією комбінаційною низькочастотною складовою з частотою
між цією комбінаційною низькочастотною складовою з частотою ![]() і сигналом низькочастотного високостабільного генератора вимірника з тією ж частотою
і сигналом низькочастотного високостабільного генератора вимірника з тією ж частотою ![]() , після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому на виході фазового детектора зміну різниці фаз
, після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому на виході фазового детектора зміну різниці фаз ![]() низькочастотних сигналів з частотами
низькочастотних сигналів з частотами ![]() , і досягши величини різниці фаз сигналів
, і досягши величини різниці фаз сигналів ![]() , зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань
, зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань ![]() , при цьому дальність об'єкта визначають по приведеній вище формулі.
, при цьому дальність об'єкта визначають по приведеній вище формулі.
Текст
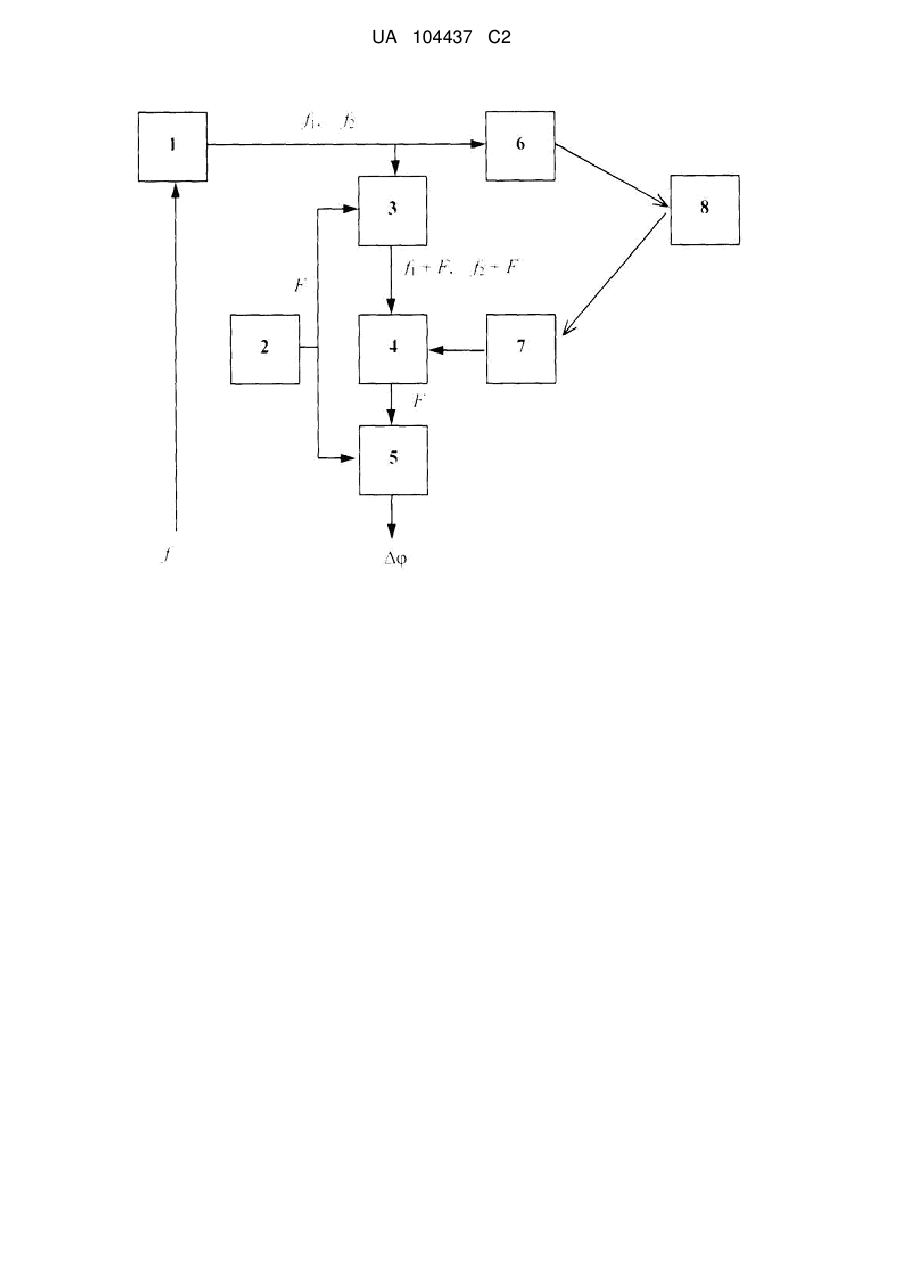
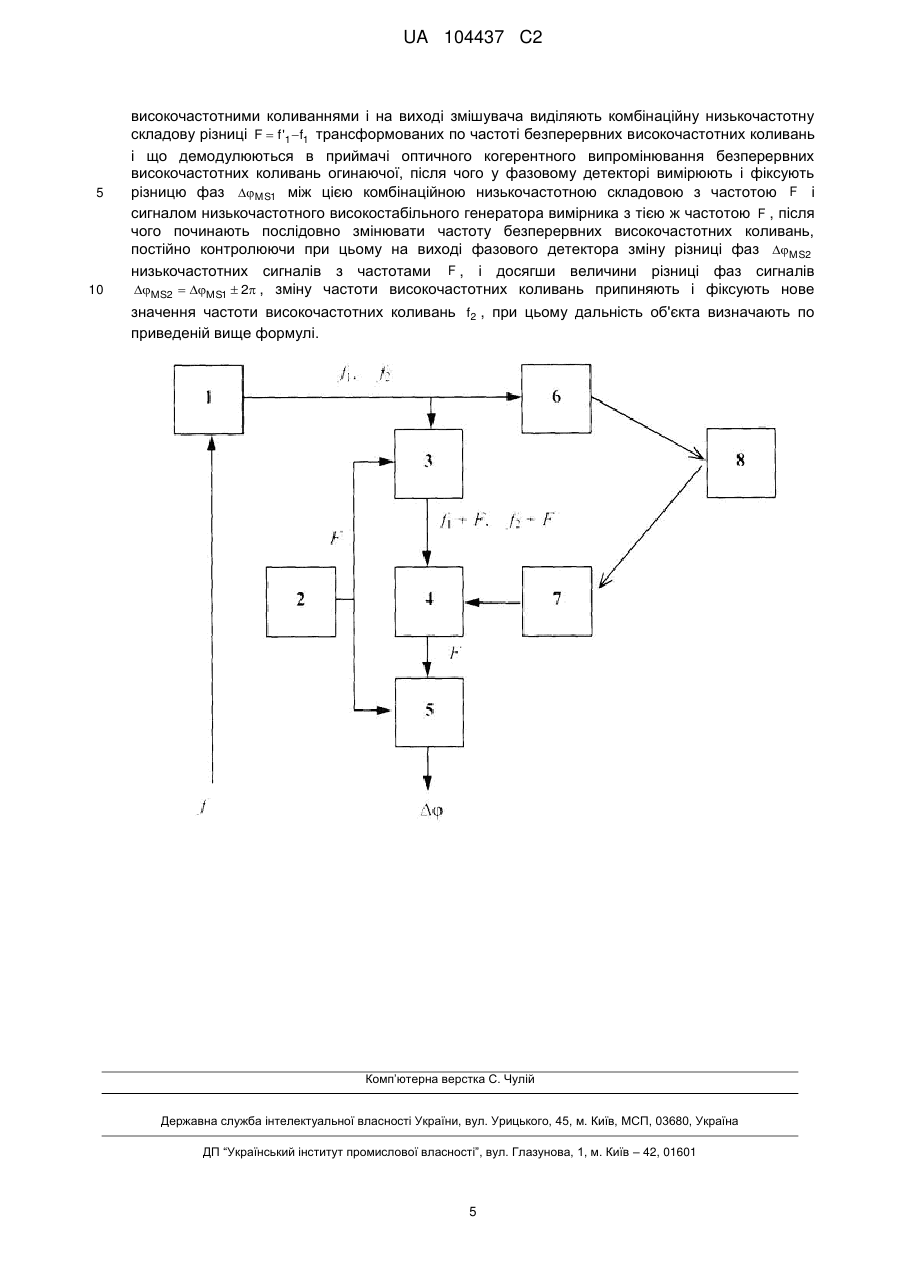
Реферат: Спосіб вимірювання дальності належить до області техніки радіотехнічних засобів вимірювання відстаней і може бути використаний, наприклад, в геодезії, будівництві, при управлінні рухом рушійних об'єктів. Новим в способі вимірювання дальності є генерування безперервних низькочастотних коливань в одному місці - у вимірнику, і генерування у вимірнику високочастотних коливань, частота яких відома, модулюючи цими коливаннями коливання джерела оптичного когерентного випромінювання, яке здійснює випромінювання оптичних коливань у напрямі об'єкта. Відбитий від об'єкта оптичний сигнал приймають, демодулюють і виділяють огинаючу коливань оптичного когерентного випромінювання, яку далі подають на змішувач, де прийняті високочастотні коливання огинаючої змішують з вихідними безперервними високочастотними коливаннями з частотою сигналу мікрохвильового генератора, але зрушені на відому низьку частоту, умовно званою частотою Допплера, яка генерується низькочастотним генератором вимірника. Далі виділяють низькочастотну комбінаційну складову різниці з подальшим вимірюванням різниці фаз цієї комбінаційної складової і сигналом низькочастотного генератора. Після цього змінюють значення частоти високочастотного генератора доти, поки різниця фаз низькочастотних сигналів не зміниться на 2π. При цьому фіксують нове значення частоти високочастотного генератора і по отриманій різниці частот високочастотного генератора обчислюють дальність. Розміщення всіх вузлів вимірника в одному місці дозволяє спростити конструкцію. Додатково спростити конструкцію дозволяє виключення другого високостабільного низькочастотного генератора і двох високонаправлених високочастотних антен. При цьому до стабільності частоти низькочастотного генератора, що залишився, пред'являють знижені вимоги. При цьому точність фазових вимірювань дальності підвищується. UA 104437 C2 (12) UA 104437 C2 UA 104437 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до області техніки радіотехнічних засобів вимірювання відстані і може бути використаний, наприклад, в геодезії, будівництві, визначення точного місця розташування об'єкта. Відомі амплітудні способи вимірювання дальності (див., наприклад, кн. Довідник по основах техніки радіолокації / під ред. В.В. Дружініна. - М.: Воен. іздат. 1967). Однак амплітудні способи вимірювання дальності мають велику погрішність. Найбільш близьким по технічній суті до винаходу є спосіб вимірювання відстані від вимірювальної станції до ретранслятора, описаний в патенті України № 93645, опубл. у Б. № 4 від 25.02.2011, МПК G01S 13/32. За цим способом вимірювання відстані від вимірювальної станції до ретранслятора, що включає первинне випромінювання, первинний прийом, зсув частоти вихідних високочастотних коливань, посилення високочастотних коливань, вторинне випромінювання, вторинний прийом високочастотних коливань, спочатку у вимірювальній станції і в ретрансляторі двома генераторами одночасно генерують безперервні низькочастотні високостабільні коливання з максимально близькими частотами F та F’, одночасно з цим у вимірювальній станції генерують безперервні високочастотні коливання з відомою фіксованою частотою f1, які через циркулятор і через антену вимірювальної станції первинно випромінюють у напрямі антени ретранслятора, при цьому частину енергії високочастотних коливань, що спочатку згенерували, подають на змішувач, при цьому випромінювані безперервні високочастотні коливання первинно приймають антеною ретранслятора і через циркулятор подають на підсилювач, де їх підсилюють і далі посилені коливання подають на керований фазообертач, де в ці високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією управляючого сигналу з частотою F’ від низькочастотного високостабільного генератора ретранслятора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою f’1=f1+F’ подають через циркулятор на антену ретранслятора і перевипромінюють у напрямі антени вимірювальної станції, де ці коливання антеною вимірювальної станції, які повторно випромінюють, повторно приймають і через циркулятор подають на змішувач, де повторно прийняті високочастотні коливання змішують з вихідними безперервними високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці вихідних безперервних високочастотних коливань і повторно прийнятих трансформованих по частоті безперервних високочастотних коливань F’=f’1-f1, після чого вимірюють і фіксують різницю фаз ΔφИЗ1, між цією комбінаційною низькочастотною складовою з частотою F’ і сигналом місцевого низькочастотного генератора з максимально близькою частотою F, після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому зміну різниці фаз Δφ ИЗ2, низькочастотних сигналів з частотами F та F’, і досягти величини різниці фаз сигналів Δφ ИЗ2=ΔφИЗ1±2π=ΔφИЗ1 зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань f2, при цьому дальність від антени вимірювальної станції до антени ретранслятора визначають по формулі: c D 2f1 f2 , де с - швидкість світла, при цьому значення частот F та F’ високостабільних низькочастотних генераторів вибирають близькими один відносно одного настільки, наскільки допускається зміна різниці фаз сигналів, які генеруються цими генераторами за час виконання всієї процедури вимірювання дальності або, іншими словами, зміна цій різниці фаз за весь час вимірювання дальності не повинна перевищувати абсолютної роздільної здатності вживаного вимірника різниці фаз. Однак вказаний спосіб вимірювання дальності має істотні недоліки, які полягають у тому, що для вимірювання дальності необхідно на об'єкті встановлювати ретранслятор, що є не завжди можливим. Крім того, для випромінювання і прийому радіочастотних сигналів на об'єкті і вимірювальній станції необхідно встановлювати антени з високою спрямованістю, що робить пристрої громіздкими. І останнє, вимірювання відстані по способу-прототипу передбачає генерування безперервних низькочастотних високостабільних коливань з максимально близькими частотами F та F’ на об'єкті і вимірювальній станції окремо. Ці частоти не можуть бути рівні у принципі, що є додатковим джерелом погрішності. Задачею винаходу є спрощення можливої конструкції вимірника дальності і збільшення точності вимірювання дальності. Поставлена задача вирішується тим, що за способом вимірювання дальності, який включає генерування безперервних низькочастотних коливань, генерування безперервних високочастотних коливань, зсув частоти цих безперервних високочастотних коливань за допомогою керованого фазообертача, змішування початкових і 1 UA 104437 C2 5 10 15 20 25 30 35 40 45 50 55 трансформованих по частоті безперервних високочастотних коливань, виділення комбінаційної складової різниці, управління частотою безперервних високочастотних коливань по заданому алгоритму, безперервним вимірюванням різниці фаз між вихідним безперервним низькочастотним сигналом і виділеної комбінаційної складової різниці і за результатами управління частотою і фіксацією різниць фаз обчисленням дальності за формулою c D 2f1 f2 , що відрізняється тим, що все вимірювальне обладнання розташовують в одному місці - у вимірювальній станції, при цьому здійснюють розділення сигналу високочастотного генератора на два канали, при цьому в одному каналі безперервні високочастотні коливання з відомою фіксованою частотою f1 подають на керований фазообертач, де в ці безперервні високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією управляючого сигналу з частотою F від низькочастотного високостабільного генератора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою f’1=f1+F подають на високочастотний змішувач, при цьому в другому каналі отриманими безперервними високочастотними коливаннями здійснюють модуляцію інтенсивності сигналу джерела оптичного когерентного випромінювання, після чого здійснюють випромінювання оптичних когерентних коливань, що модулюються по амплітуді у напрямі об'єкта, дальність якого необхідно вимірювати, після чого відбитий від об'єкта оптичний сигнал приймають приймачем оптичного когерентного випромінювання, де здійснюють демодуляцію оптичного сигналу і виділяють огинаючу оптичного когерентного випромінювання, частота якої дорівнює частоті вихідних безперервних високочастотних коливань, а фаза цієї огинаючої містить інформацію про дальність об'єкта, після чого сигнал огинаючої подають на змішувач, де ці високочастотні коливання огинаючої змішують з трансформованими по частоті безперервними високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці F=f’1-f1 трансформованих по частоті безперервних високочастотних коливань і демодульованих у приймачі оптичного когерентного випромінювання безперервних високочастотних коливань огинаючої, після чого у фазовому детекторі вимірюють і фіксують різницю фаз ΔφMS1, між цією комбінаційною низькочастотною складовою з частотою F та сигналом низькочастотного високостабільного генератора вимірника з тією ж частотою F, після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому на виході фазового детектора зміну різниці фаз низькочастотних сигналів з частотами F, і досягши величини різниці фаз сигналів ΔφMS2=ΔφMS1±2π зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань f2, при цьому дальність об'єкту визначають по приведеній вище формулі. Порівняння винаходу з вже відомими способами і прототипом показує, що заявлений спосіб передбачає спрощення конструкції пристрою і збільшення точності визначення дальності. Зокрема, все обладнання для вимірювання дальності розташовують в одному місці - у вимірювальній станції, що само по собі підвищує зручність використання вимірника, який реалізовується. Високочастотні високонаправлені антени при цьому виключають і замість них використовують джерело і приймач когерентного оптичного випромінювання, що здешевлює пристрій у цілому і робить його компактним. Окрім цього, вимірювання різниці фаз з подальшим обчисленням дальності об'єкту здійснюють між двома низькочастотними сигналами, виникненими від одного і того ж джерела, стабільність частоти якого може бути невисока. Додаткової складової погрішності вимірювання дальності при цьому не виникає. Ці властивості винаходу є новими, оскільки в способі прототипі через властиві йому недоліки, що полягають в наявності погрішності вимірювання дальності, обумовленої генеруванням низькочастотних сигналів двома окремими низькочастотними генераторами, вимірювання дальності здійснюють неефективно. Крім того, пристрій, що реалізовує спосіб прототип, є досить складний в конструкції, громіздкий і дорогий, оскільки вимагає для своєї реалізації два низькочастотні генератори і дві високонаправлені високочастотні антени. При цьому частину обладнання необхідно встановлювати на об'єкті, дальність якого необхідно вимірювати. Вказаний спосіб вимірювання дальності можна реалізувати за допомогою пристрою, приведеного на кресленні. Пристрій вимірювання дальності складається з керованого генератора високочастотних коливань 1, генератора низькочастотних коливань 2, керованого фазообертача 3, змішувача 4, фазового детектора 5, джерела оптичного когерентного випромінювання 6, приймача оптичного когерентного випромінювання 7 та об'єкта 8. 2 UA 104437 C2 5 10 15 20 25 30 35 40 45 50 Вихід генератора високочастотних коливань 1 з'єднаний одночасно з модуляційним входом джерела оптичного когерентного випромінювання 6 та сигнальним входом фазообертача 3, вхід управління якого з'єднаний з виходом генератора низькочастотних коливань 2, при цьому вихід керованого фазообертача 3 з'єднаний з першим входом змішувача 4, другий вхід якого є з'єднаний з виходом приймача оптичного когерентного випромінювання 7, причому вихід змішувача 4 з'єднаний з першим входом фазового детектора 5, другий вхід якого з'єднаний з виходом генератора низькочастотних коливань 2. Працює пристрій, що реалізовує спосіб вимірювання дальності таким чином. Генератор низькочастотних коливань 2 генерує безперервні низькочастотні коливання з частотою F, амплітудою U0 та початковою фазою φLF. Керований генератор високочастотних коливань 1 генерує безперервні високочастотні коливання з деякою відомою і зафіксованою частотою f1, початковою фазою φ0 та амплітудою U0, описувані наступним вираженням u1(t)=U0sin(2πf1t+φ0). Ці високочастотні коливання подають на модуляційний вхід джерела оптичного когерентного випромінювання 6 і модулюють, тим самим, по амплітуді його когерентний оптичний сигнал, який випромінюють у напрямі об'єкту 8. Огинаюча з частотою f1 модульованих когерентних оптичних коливань при поширенні на відстань D від джерела оптичного когерентного випромінювання 6 до об'єкта 8 отримує набіг фази 2f1 1 D c , де с - швидкість світла. Відбиваючись від об'єкта і проходячи цю ж відстань D між об'єктом 8 та приймачем оптичного когерентного випромінювання 7, огинаюча модульованих оптичних коливань отримує додатковий фазовий набіг тієї ж величини, оскільки відстань між джерелом оптичного когерентного випромінювання 6 та приймачем оптичного когерентного випромінювання 7 багато менше вимірюваної дальності D, а джерело та приймач оптичного когерентного випромінювання розташовують в одній площині. Результуючий набіг фази при поширенні на подвійну відстань D огинаючої оптичних когерентних коливань з частотою f1 буде рівний 4f1 1 D c . Приймачем оптичного когерентного випромінювання 7 модульований оптичний когерентний сигнал приймають і демодулюють, виділяючи огинаючу 4f1 u2 t U0 A sin2f1 0 D c , де А - деякий множник послаблення, що умовно приймається рівним одиниці. Сигнал огинаючої подають на другий вхід змішувача 4. Керований фазообертач 3 виробляє зсув спектра безперервних високочастотних коливань, що отримуються на виході керованого генератора високочастотних коливань 1, на частоту низькочастотних коливань F. Якщо за час періоду низькочастотного сигналу управління Т у безперервні високочастотні коливання монотонно вводять фазовий зсув φ=2π, то можна говорити, що ці коливання зміщують на частоту F 1T , що можна інтерпретувати з допплерівським зсувом частоти f’1=f1+F. При цьому сигнал на виході керованого фазообертача описують наступним вираженням: u3(t)=U0sin[2π(f1+F)t+φ0+φLF]. Даний сигнал подають на перший вхід змішувача 4, після чого на його виході виділяють комбінаційну низькочастотну складову різниці трансформованих по частоті безперервних високочастотних коливань u3(t) і коливань огинаючої u2(t), описувану наступним виразом 4f1 u 4 U0 sin 2Ft D LF c , яку подають на перший вхід фазового детектора 5, на другий вхід якого подають вихідний сигнал генератора низькочастотних коливань 2. Після цього на виході фазового детектора 5 вимірюють різницю фаз ΔφMS1, двох безперервних низькочастотних коливань з однаковими частотами F і однаковими початковими фазами φLF, отримуваних на виході змішувача 4 і генератора низькочастотних коливань 2. У результаті виміряна різниця фаз буде рівна 3 UA 104437 C2 4f1 D c , Цю різницю фаз ΔφMS1 фіксують, після цього починають змінювати частоту початкових високочастотних коливань, одночасно контролюючи зміну різниці фаз на виході фазового детектора 5 і при зміні цієї різниці фаз на 2π від величини Δφ MS1, зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти f2. При цьому різниця фаз низькочастотних сигналів на виході фазового детектора 5 буде 4f2 MS 2 2 D c . З іншого боку, якщо взяти до уваги, що ΔφMS2=ΔφMS1±2π, а дальність D одна і та ж для обох формул, то згідно з відомою формулою c D 4f1 f2 , MS1 1 5 10 де Δφ=ΔφMS2-ΔφMS1, або c D 2f2 f1 . 15 20 Ефект від використання винаходу пов'язаний із спрощенням конструкції вимірника дальності, пов'язаної з виключенням другого генератора низькочастотних коливань і високочастотних високонаправлених антен. При цьому до стабільності частоти генератора низькочастотних коливань пред'являються знижені вимоги. Всі вузли обладнання для вимірювання дальності розміщують при цьому в одному місці. Інший аспект підвищення ефективності від використання винаходу пов'язаний з можливістю вимірювання дальності з підвищеною точністю, при цьому неоднозначність вимірювань виключається. Підвищення точності вимірювання обумовлюється тим, що знімання свідчень вимірника різниці фаз завжди здійснюється на краю шкали, забезпечуючи тим самим мінімальну помилку прочитування свідчень, а погрішність вимірювання дальності, обумовлена наявністю двох несинхронізованих генераторів низької частоти, відсутня у принципі. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 Спосіб вимірювання дальності, що включає генерування безперервних низькочастотних коливань, генерування безперервних високочастотних коливань, зсув частоти цих безперервних високочастотних коливань за допомогою керованого фазообертача, зсув вихідних і трансформованих по частоті безперервних високочастотних коливань, виділення комбінаційної складової різниці, управління частотою безперервних високочастотних коливань по заданому алгоритму, безперервним вимірюванням різниці фаз між вихідним безперервним низькочастотним сигналом і виділеної комбінаційної складової різниці і за результатами управління частотою і фіксацією різниць фаз обчисленням дальності за формулою D c , 2f 2 f1 який відрізняється тим, що все вимірювальне обладнання розміщують в одному місці - у вимірювальній станції, при цьому здійснюють розділення сигналу високочастотного генератора на два канали, при цьому в одному каналі безперервні високочастотні коливання з відомою фіксованою частотою f1 подають на керований фазообертач, де в ці безперервні високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією управляючого сигналу, з частотою F від низькочастотного високостабільного генератора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою f '1 f1 F подають на високочастотний змішувач, при цьому в другому каналі отриманими безперервними високочастотними коливаннями здійснюють модуляцію інтенсивності сигналу джерела оптичного когерентного випромінювання, після чого здійснюють випромінювання оптичних когерентних коливань, модульованих по амплітуді у напрямі об'єкта, дальність якого необхідно вимірювати, після чого відбитий від об'єкта оптичний сигнал приймають приймачем оптичного когерентного випромінювання, де здійснюють демодуляцію оптичного сигналу і виділяють огинаючу оптичного когерентного випромінювання, частота якої дорівнює частоті вихідних безперервних високочастотних коливань, а фаза цієї огинаючої містить інформацію про дальність об'єкта, після чого сигнал огинаючої подають на змішувач, де ці високочастотні коливання огинаючої змішують з трансформованими по частоті безперервними 4 UA 104437 C2 5 10 високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці F f '1 f1 трансформованих по частоті безперервних високочастотних коливань і що демодулюються в приймачі оптичного когерентного випромінювання безперервних високочастотних коливань огинаючої, після чого у фазовому детекторі вимірюють і фіксують різницю фаз MS1 між цією комбінаційною низькочастотною складовою з частотою F і сигналом низькочастотного високостабільного генератора вимірника з тією ж частотою F , після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому на виході фазового детектора зміну різниці фаз MS2 низькочастотних сигналів з частотами F , і досягши величини різниці фаз сигналів MS2 MS1 2 , зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань f2 , при цьому дальність об'єкта визначають по приведеній вище формулі. Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюShyrokov Ihor Borysovych
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: G01S 13/32
Мітки: дальності, вимірювання, спосіб
Код посилання
<a href="https://ua.patents.su/7-104437-sposib-vimiryuvannya-dalnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання дальності</a>
Спосіб вимірювання дальності
Номер патенту: 94529
Опубліковано: 10.05.2011
Автор: Широков Ігор Борисович
МПК: G01S 13/32
Мітки: спосіб, дальності, вимірювання
Формула / Реферат:
Спосіб вимірювання дальності, що включає первинне випромінювання, первинний прийом, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку генерують два безперервні високочастотні коливання з відомими частотами і , та через суматор, через один циркулятор і...
Спосіб вимірювання дальності до об’єкта зі штучно зниженою площею віддзеркалення
Номер патенту: 14159
Опубліковано: 15.05.2006
Автори: Рукосуєв Віктор Віталійович, Солонніков Владислав Григорович, Пархомей Ігор Ростиславович
МПК: G01S 13/74, G01S 13/00, G01S 13/76
Мітки: штучної, площею, зниженою, вимірювання, спосіб, віддзеркалення, дальності, об'єкта
Формула / Реферат:
Спосіб вимірювання дальності до об'єкта зі штучно зниженою площею віддзеркалення, при якому випромінюють електромагнітний зондувальний імпульс, фіксують час випромінювання електромагнітного зондувального імпульсу, приймають електромагнітний імпульс, що перевипромінюється від об'єкта, фіксують час прийому електромагнітного імпульсу, що перевипромінюється від об'єкта, визначають час затримки між часом випромінювання електромагнітного...
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора
Номер патенту: 93645
Опубліковано: 25.02.2011
Автор: Широков Ігор Борисович
МПК: G01S 13/32
Мітки: спосіб, станції, вимірювання, відстані, ретранслятора, вимірювальної
Формула / Реферат:
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора, що включає первинне випромінювання, первинний прийом, підсилення високочастотних коливань, зсув частоти високочастотних коливань, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку у вимірювальній станції і в ретрансляторі двома генераторами одночасно генерують безперервні низькочастотні високостабільні коливання з...
Спосіб вимірювання мінімальної дальності до цілі в імпульсній рлс
Номер патенту: 25868
Опубліковано: 27.08.2007
Автори: Антюхов Юрій Митрофанович, Бортнік Володимир Іванович, Добруля Віктор Іванович
МПК: G01S 13/08
Мітки: імпульсний, дальності, спосіб, цілі, вимірювання, рлс, мінімальної
Формула / Реферат:
Спосіб вимірювання мінімальної дальності до цілі в імпульсній РЛС, заснований на випромінюванні імпульсного сигналу в напрямку цілі, прийнятті відбитого сигналу, вимірі часу надходження відбитого сигналу і перетворенні часу запізнювання в дальність, який відрізняється тим, що випромінюваний імпульсний сигнал формують у вигляді послідовності n кодових посилок, остання з яких відрізняється від усіх попередніх, визначають час надходження...
Спосіб вимірювання дальності
Номер патенту: 40335
Опубліковано: 16.07.2001
Автори: Обод Іван Іванович, Полюга Валентин Петрович, Вінник Анатолій Тихонович
МПК: G01C 21/00
Мітки: вимірювання, дальності, спосіб
Формула / Реферат:
Спосіб вимірювання дальності, який полягає в тому, що запитником випромінюють кодовий сигнал запиту дальності на несучій частоті f1, який приймають відповідачем, декодують, випромінюють кодовий сигнал відповіді дальності на несучій частоті f2, який приймають та декодують запитником, і по часу запізнювання між випромінюваним та прийнятим кодовим сигналами дальності вимірюють дальність, який відрізняється тим, що із прийнятих сигналів...
Попередній патент: Збагачений залізом харчовий продукт
Наступний патент: Спосіб одержання дабігатрану і його проміжних сполук
Випадковий патент: Спосіб профілактики та корекції метаболічного синдрому