Спосіб вимірювання відстані від вимірювальної станції до ретранслятора
Формула / Реферат
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора, що включає первинне випромінювання, первинний прийом, підсилення високочастотних коливань, зсув частоти високочастотних коливань, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку у вимірювальній станції і в ретрансляторі двома генераторами одночасно генерують безперервні низькочастотні високостабільні коливання з максимально близькими частотами F і F', одночасно з цим у вимірювальній станції генерують безперервні високочастотні коливання з відомою фіксованою частотою f1, які через циркулятор і через антену вимірювальної станції первинно випромінюють у напрямі антени ретранслятора, при цьому частку енергії високочастотних коливань, що спочатку згенерували, подають на змішувач, безперервні високочастотні коливання, що при цьому випромінюють, первинно приймають антеною ретранслятора і через циркулятор подають на підсилювач, де їх підсилюють і далі підсилені коливання подають на керований фазообертач, де в ці високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією керуючого сигналу з частотою F' від низькочастотного високостабільного генератора ретранслятора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою f1' = f1 + F' подають через циркулятор на антену ретранслятора і перевипромінюють у напрямі антени вимірювальної станції, де ці коливання антенної вимірювальної станції повторно приймають і через циркулятор подають на змішувач, де повторно прийняті високочастотні коливання змішують з початковими безперервними високочастотними коливаннями і на виході змішувача виділяють комбінаційну низькочастотну складову різниці початкових безперервних високочастотних коливань і повторно прийнятих трансформованих по частоті безперервних високочастотних коливань F' = f1' – f1, після чого вимірюють і фіксують різницю фаз ![]() ИЗ1 між цією комбінаційною низькочастотною складовою з частотою F' і сигналом місцевого високостабільного низькочастотного генератора з максимально близькою частотою F, після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому зміну різниці фаз
ИЗ1 між цією комбінаційною низькочастотною складовою з частотою F' і сигналом місцевого високостабільного низькочастотного генератора з максимально близькою частотою F, після чого починають послідовно змінювати частоту безперервних високочастотних коливань, постійно контролюючи при цьому зміну різниці фаз ![]() ИЗ2 низькочастотних сигналів з частотами F і F' і, досягши величини різниці фаз сигналів
ИЗ2 низькочастотних сигналів з частотами F і F' і, досягши величини різниці фаз сигналів ![]() ИЗ2 =
ИЗ2 = ![]() ИЗ1 ± 2
ИЗ1 ± 2![]() =
= ![]() ИЗ1, зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань f2, при цьому дальність від антени вимірювальної станції до антени ретранслятора визначають за формулою:
ИЗ1, зміну частоти високочастотних коливань припиняють і фіксують нове значення частоти високочастотних коливань f2, при цьому дальність від антени вимірювальної станції до антени ретранслятора визначають за формулою:
![]() ,
,
де с - швидкість світла,
при цьому значення частот F і F' високостабільних низькочастотних генераторів вибирають близькими одне щодо одного настільки, наскільки допускається зміна різниці фаз сигналів, що генеруються цими генераторами за час виконання всієї процедури вимірювання дальності або, іншими словами, зміна цієї різниці фаз за весь час вимірювання дальності не повинна перевищувати абсолютної роздільної здатності використовуваного вимірника різниці фаз.
Текст
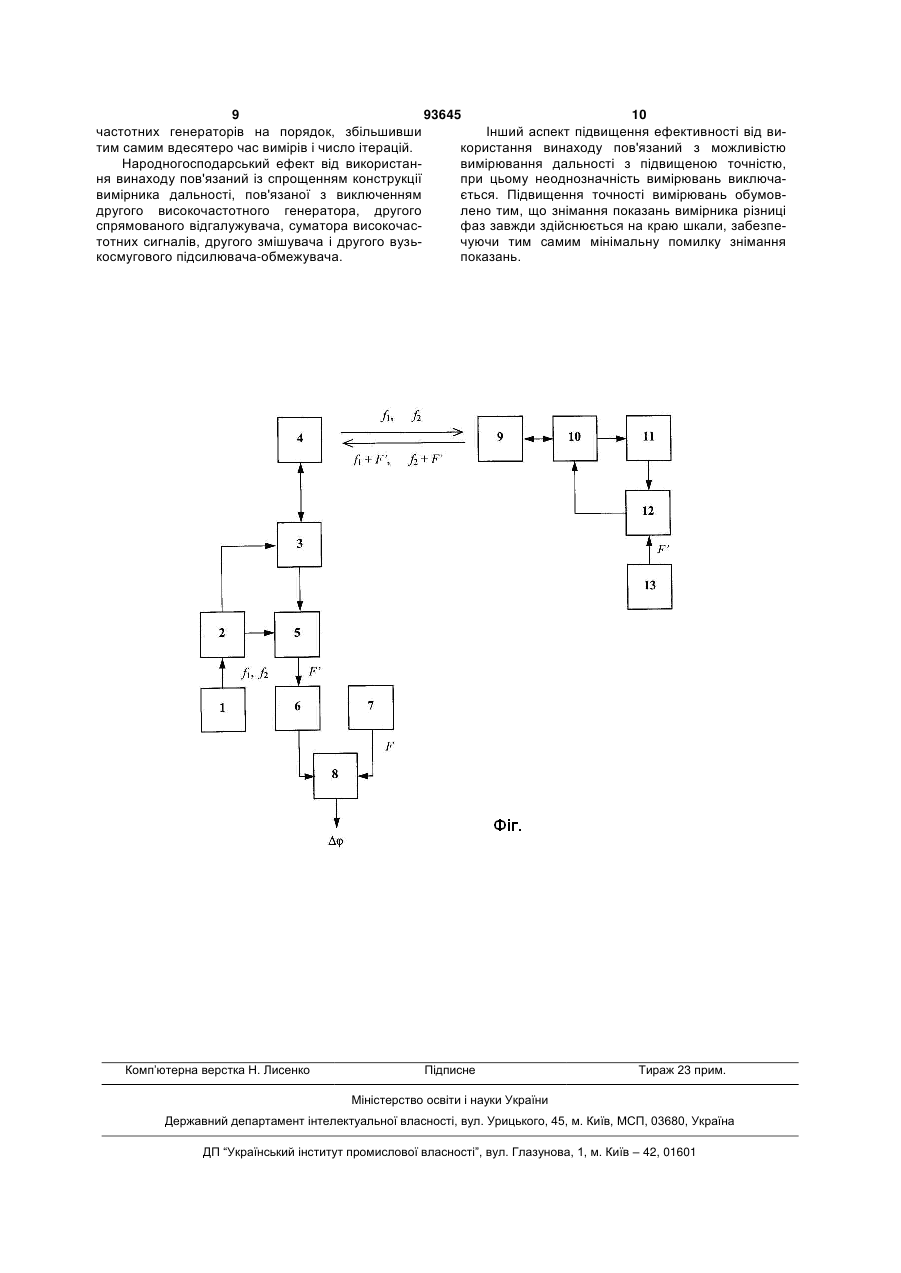
Спосіб вимірювання відстані від вимірювальної станції до ретранслятора, що включає первинне випромінювання, первинний прийом, підсилення високочастотних коливань, зсув частоти високочастотних коливань, вторинне випромінювання, вторинний прийом високочастотних коливань, який відрізняється тим, що спочатку у вимірювальній станції і в ретрансляторі двома генераторами одночасно генерують безперервні низькочастотні високостабільні коливання з максимально близькими частотами F і F', одночасно з цим у вимірювальній станції генерують безперервні високочастотні коливання з відомою фіксованою частотою f1, які через циркулятор і через антену вимірювальної станції первинно випромінюють у напрямі антени ретранслятора, при цьому частку енергії високочастотних коливань, що спочатку згенерували, подають на змішувач, безперервні високочастотні коливання, що при цьому випромінюють, первинно приймають антеною ретранслятора і через циркулятор подають на підсилювач, де їх підсилюють і далі підсилені коливання подають на керований фазообертач, де в ці високочастотні коливання вводять монотонно наростаючий фазовий зсув під дією керуючого сигналу з частотою F' від низькочастотного високостабільного генератора ретранслятора, причому трансформовані таким чином по частоті безперервні високочастотні коливання з частотою f1' = f1 + F' подають через циркулятор на антену ретранслятора і пере C2 2 (19) 1 3 93645 4 Воєн. Іздат, 1967.) Проте амплітудні способи вимітних сигналів. Введення цих пристроїв здорожчує рювання дальності мають велику похибку. конструкцію в цілому. Найбільш близьким за технічною суттю до пеОкрім цього, при вимірі дальності за вказаним редбачуваного винаходу є спосіб вимірювання способом можлива поява принципової помилки дальності, описаний в заявці на патент України виміру дальності, пов'язаної з вибором значень а201003481 від 25.03.2010, MПК G01S13/32. частот f1 і f2. Річ у тому, що дійсного значення даЗа цим способом вимірювання відстані від вильності можна досягти, вибравши значення частот, мірювальної станції до ретранслятора, що вклющо не набагато відрізняються одне від одного. При чає первинне випромінювання, первинний прийом, цьому дальність визначають по зміряній різниці вторинне випромінювання, вторинний прийом вифаз , яка, у свою чергу, залежить не лише від сокочастотних коливань, спочатку генерують два дальності D, але і від різниці частот (f1-f2). безперервні високочастотні коливання з відомими Абсолютно очевидно, що чим більше ця різничастотами f1 і f2, і через суматор, через один цирця частот (f1-f2), тим більше буде визміряне знакулятор і через одну спільну антену вимірювальної чення різниці фаз і тим точніше буде визначестанції ці безперервні високочастотні коливання но дальність від вимірювальної станції до первинно випромінюють у напрямі антени ретранретранслятора. Проте, якщо різницю частот (f1-f2) слятора, при цьому частку енергії спочатку згенеможна збільшувати теоретично скільки завгодно рованих двох високочастотних коливань подають багато, від нуля до безкінечності, то різниця фаз на два змішувачі, для кожного каналу на свій, без при цьому збільшуватиметься від нуля (для перервні високочастотні коливання, що при цьому випадку рівності частот f1 і f2) до величини 2 мавипромінюють, в ретрансляторі первинно приймаксимум і певному значенні різниці частот f1 і f2, ють і через циркулятор подають на підсилювач, де визначуваному дальністю D. Подальше збільшенїх підсилюють і далі посилені коливання подають ня різниці частот (f1-f2) приведе до того, що різниця на керований фазообертач, де в обидва ці високофаз знов змінюватиметься в межах від нуля до частотні коливання вводять монотонно наростаю2 . Іншими словами, неправильний вибір значень чий фазовий зсув під дією керуючого сигналу від частот високочастотних генераторів f1 і f2 (при дунизькочастотного генератора, причому трансфорже великій різниці значень цих частот) приведе до мовані, таким чином, по частоті безперервні висонеправильного визначення відстані від вимірювакочастотні коливання з частотами f1=f1+F і f2=f2+F льної станції до ретранслятора. З іншого боку, цю подають через циркулятор на антену ретранслярізницю частот необхідно вибирати якомога більтора і перевипромінюють у напрямі антени виміше, що дозволить обчислити відстань від вимірюрювальної станції, де ці обидва коливання антенвальної станції до ретранслятора з найбільшою ної вимірювальної станції, що повторно точністю. Але, оскільки ця відстань апріорі невідовипромінюють, повторно приймають і через циркума, то правильно вибрати значення різниці частот лятор подають на змішувачі, де обидва повторно неможливо. При цьому дальність визначатиметься прийняті високочастотні коливання змішують з або з великою помилкою, або визначатиметься початковими безперервними високочастотними принципово невірно. коливаннями, в кожному каналі зі своїм, і на вихоЗадачею запропонованого винаходу є спродах змішувачів виділяють комбінаційні низькочасщення можливої конструкції вимірника дальності і тотні різниці початкових безперервних високочасзбільшення точності виміру дальності. Поставлена тотних коливань і повторно прийнятих мета досягається тим, що за способом вимірювантрансформованих по частоті безперервних висоня відстані від вимірювальної станції до ретранскочастотних коливань, причому на виході змішувалятора, що включає первинне випромінювання, ча того каналу, де генерують коливання з частопервинний прийом, підсилення високочастотних тою f1, виділяють комбінаційну низькочастотну коливань, зсув частоти високочастотних коливань, складову з частотою F=f1-f1, а на виході змішувача вторинне випромінювання, вторинний прийом витого каналу, де генерують коливання з частотою f2, сокочастотних коливань, спочатку у вимірювальній виділяють комбінаційну низькочастотну складову з станції і в ретрансляторі двома генераторами одтією ж частотою F=f2-f2, після чого вимірюють різночасно генерують безперервні низькочастотні ницю фаз між цими двома комбінаційними високостабільні коливання з максимально близьнизькочастотними складовими з частотами F, при кими частотами F і F, одночасно з цим у вимірюцьому відстань від антени вимірювальної станції вальній станції генерують безперервні високочасдо антени ретранслятора визначають за формутотні коливання з відомою фіксованою частотою f1, лою: які через циркулятор і через антену вимірювальної c станції первинно випромінюють у напрямі антени D , 4f1 f2 ретранслятора, при цьому частку енергії високочаде с - швидкість світла. стотних коливань, що спочатку згенерували, поПроте, вказаний спосіб вимірювання дальності дають на змішувач, безперервні високочастотні реалізується за допомогою пристрою, досить коливання, що при цьому випромінюють, первинно складного у виготовленні. Складність виготовленприймають антеною ретранслятора і через циркуня обумовлена тим, що в пристрої використовулятор подають на підсилювач, де їх підсилюють і ються два генератори безперервних високочастодалі посилені коливання подають на керований тних коливань, два спрямовані відгалужувачі, два фазообертач, де в ці високочастотні коливання змішувача, два вузькосмугових підсилювачавводять монотонно наростаючий фазовий зсув під обмежувача і один спільний суматор високочастодією керуючого сигналу з частотою F від низько 5 93645 6 частотного високостабільного генератора ретранвань 1, спрямованого відгалужувача 2, Yслятора, причому трансформовані таким чином по циркулятора вимірювальної станції 3, антени вимічастоті безперервні високочастотні коливання з рювальної станції 4, змішувача 5, вузькосмугового підсилювача-обмежувача 6, першого високостабічастотою f1=f1+F подають через циркулятор на льного низькочастотного генератора 7, вимірника антену ретранслятора і перевипромінюють у нарізниці фаз 8, антени ретранслятора 9, Yпрямі антени вимірювальної станції, де ці колициркулятора ретранслятора 10, підсилювача висовання антенної вимірювальної станції повторно кочастотних коливань 11, керованого фазообертаприймають і через циркулятор подають на змішуча 12, другого високостабільного низькочастотного вач, де повторно прийняті високочастотні колигенератора 13. вання змішують з початковими безперервними Вихід генератора високочастотних коливань 1 високочастотними коливаннями і на виході змішуз'єднаний зі входом спрямованого відгалужувача вача виділяють комбінаційну низькочастотну скла2, перший вихід якого з'єднаний із першим виводову різниці початкових безперервних високочасдом Y-циркулятора вимірювальної станції 3, друтотних коливань і повторно прийнятих гий вивід якого з'єднаний з антеною вимірювальної трансформованих по частоті безперервних висостанції 4, а третій вивід Y-циркулятора вимірювакочастотних коливань F=f1-f1, після чого вимірюльної станції 3 з'єднаний із першим входом змішують і фіксують різницю фаз ИЗ1 між цією комбівача 5, причому другий вихід спрямованого відганаційною низькочастотною складовою з частотою лужувача 2 з'єднаний із другим входом змішувача F і сигналом місцевого високостабільного низько5, причому вихід змішувача 5 з'єднаний зі входом частотного генератора з максимально близькою вузькосмугового підсилювача-обмежувача 6, причастотою F’, після чого починають послідовно змічому вихід вузькосмугового підсилювачанювати частоту безперервних високочастотних обмежувача 6 з'єднаний з першим входом вимірколивань, постійно контролюючи при цьому зміну ника різниці фаз 8, причому вихід першого високорізниці фаз ИЗ2 низькочастотних сигналів з часстабільного низькочастотного генератора 7 з'єдтотами F і F і досягши величини різниці фаз сигнаний з другим входом вимірника різниці фаз 8, налів ИЗ2= ИЗ1±2 = ИЗ1 зміну частоти випри цьому антена ретранслятора 9 з'єднана з песокочастотних коливань припиняють і фіксують ршим виводом Y-циркулятора ретранслятора 10, нове значення частоти високочастотних коливань другий вивід якого з'єднаний із входом підсилюваf2, при цьому дальність від антени вимірювальної ча високочастотних коливань 11, вихід якого з'єдстанції до антени ретранслятора визначають за наний з сигнальним входом керованого фазооберформулою: тача 12, вхід керування якого з'єднаний з виходом c другого високостабільного низькочастотного генеD , ратора 13, при цьому вихід керованого фазообер2f1 f2 тача з'єднаний з третім виводом Y-циркулятора де с - швидкість світла, при цьому значення частот ретранслятора 10. F і F високо стабільних низькочастотних генераПрацює пристрій, що реалізовує спосіб виміторів вибирають близькими одне щодо одного нарювання дальності, що заявляється, таким чином. стільки, наскільки допускається зміна різниці фаз Високо стабільні низькочастотні генератори 7 і сигналів, що генеруються цими генераторами за 13 одночасно генерують безперервні низькочасточас виконання всієї процедури вимірювання дальтні високостабільні коливання з максимально блиності або, іншими словами, зміна цієї різниці фаз зькими частотами F і F. Генератор високочастотза весь час вимірювання дальності не повинна них коливань 1 спочатку генерує безперервні перевищувати абсолютної роздільної здатності високочастотні коливання з відомою частотою f1, вживаного вимірника різниці фаз. початковою фазою 01 і амплітудою U0 Порівняння передбачуваного винаходу зі вже u1(t) = U0sin(2 f1+ 01). відомими способами і прототипом показує, що Ці коливання через спрямований відгалужувач спосіб, що заявляється, виявляє нові технічні вла2 з незначними втратами енергії подають на Yстивості, що полягають у підвищенні точності вициркулятор вимірювальної станції 3 і далі за домірювання дальності і передбачає спрощення помогою антени вимірювальної станції 4 випроміконструкції пристрою, що реалізовує спосіб. нюють у напрямі антени ретранслятора 9. ВисокоЦі властивості винаходу є новими, оскільки в частотні коливання з частотою f1 при поширенні на способі-прототипі через властиві йому недоліки, відстань D від антени вимірювальної станції 3 до що полягають в невизначеності вибору значень антени ретранслятора 9 отримують набіг фази частот f1 і f2, вимір дальності виконується або з великою похибкою, або визначає дальність прин2f1 1 D, ципово невірно. Крім того, пристрій, що реалізовує c спосіб-прототип, досить складний і дорогий, оскіде с - швидкість світла. Прийняті антеною рельки вимагає для своєї реалізації двох високочастранслятора 9 високочастотні коливання, що матотних генераторів, двох високочастотних спрямоють деяке сумарне загасання А1 (з врахуванням ваних відгалужувачів, двох змішувачів і суматора посилення антен) високочастотних сигналів. 2f1 Вказаний спосіб вимірювання дальності можна u2 t U01 sin 2f1 01 D, c реалізувати за допомогою пристрою, приведеного на Фіг. подають на Y-циркулятор ретранслятора 10 і далі Пристрій вимірювання дальності складається з на підсилювач високочастотних коливань 11. Далі генератора безперервних високочастотних коли 7 93645 8 підсилені високочастотні коливання подають на тотних коливань з дуже близькими частотами F і F’ сигнальний вхід керованого фазообертача 12, де в і початковими фазами 7 і 13, отримуваних на ці безперервні високочастотні коливання під дією виході високостабільного низькочастотного генесигналу керування від низькочастотного високосратора вимірювальної станції 7 і на виході вузькотабільного генератора 13 вводять монотонно насмугового підсилювача-обмежувача 6. Якщо ці ростаючий фазовий зсув. Якщо за час періоду ничастоти F і F’ співвідносяться одна щодо одної як зькочастотного сигналу керування Т у F’ = F + F, де F - різниця частот коливань вивисокочастотні коливання монотонно вводиться сокостабільних низькочастотних генераторів 7 і 13, фазовий зсув = 2 , то можна говорити, що ці то виміряна різниця фаз буде рівна 4f1 коливання зсовують на частоту F=1/T
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of distance from measuring station to repeater
Автори англійськоюShyrokov Ihor Borysovych
Назва патенту російськоюСпособ измерения расстояния ot измерительной станции до ретранслятора
Автори російськоюШироков Игорь Борисович
МПК / Мітки
МПК: G01S 13/32
Мітки: вимірювання, відстані, спосіб, вимірювальної, станції, ретранслятора
Код посилання
<a href="https://ua.patents.su/5-93645-sposib-vimiryuvannya-vidstani-vid-vimiryuvalno-stanci-do-retranslyatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання відстані від вимірювальної станції до ретранслятора</a>
Спосіб вимірювання флуктуацій набігання фази і кутів приходу радіохвиль
Номер патенту: 58814
Опубліковано: 15.08.2003
Автори: Широков Ігор Борисович, Шабан Станіслав Анатолійович
МПК: G01R 29/08
Мітки: кутів, спосіб, фазі, вимірювання, флуктуацій, набігання, приходу, радіохвиль
Формула / Реферат:
Спосіб вимірювання флуктуацій набігання фази і визначення кута приходу радіохвиль, що включає випромінювання неперервних високочастотних коливань і двоканальний прийом високочастотних коливань на дві рознесені в просторі антени, який відрізняється тим, що у кожному каналі інтерферометра окремо, спочатку в двох незалежних каналах, генерують неперервні високочастотні коливання з двома різними частотами f1 і f2, які мало відрізняються один від...
Спосіб підвищення розвідзахищеності повітряного ретранслятора
Номер патенту: 52572
Опубліковано: 25.08.2010
Автори: Чупахін Сергій Анатолійович, Кас'яненко Максим Вікторович, Щипанський Павло Володимирович, Слєпов Лев Іванович
МПК: H04B 7/00
Мітки: спосіб, підвищення, повітряного, розвідзахищеності, ретранслятора
Формула / Реферат:
Спосіб підвищення розвідзахищеності повітряного ретранслятора, при якому вибирають транспортну платформу, що містить ретрансляційну радіостанцію, визначають маршрут та висоту баражування, здійснюють запуск транспортної платформи, забезпечують набір висоти транспортної платформи і виводять транспортну платформу за допомогою навігаційного устаткування у зону баражування, який відрізняється тим, що додатково аналізують параметри прийнятого...
Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Скрипник Юрій Олексійович, Дубровний Віктор Опанасович, Ментковський Юзеф Леонович, Головко Дмитро Богданович, Кондратов Владислав Тимофійович
МПК: G01C 3/08
Мітки: відстані, нерухомого, здійснення, пристрій, спосіб, фазовий, предмета, вимірювання
Формула / Реферат:
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням,...
Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецький Віталій Анатолійович, Гнітецька Тетяна Віталіївна
МПК: G01F 23/28, G01F 23/296
Мітки: реалізації, пристрій, спосіб, вимірювання, локаційного, ультразвукового, відстані
Формула / Реферат:
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування...
Спосіб і пристрій зондування ретранслятора
Номер патенту: 75092
Опубліковано: 15.03.2006
Автори: Поддубняк Володимир Йосипович, Сорочан Анатолій Григорович
МПК: H04B 7/00, G01S 13/00
Мітки: зондування, пристрій, спосіб, ретранслятора
Формула / Реферат:
Спосіб і пристрій зондування ретранслятора включає зондсигнал з лінійним перестроюванням частоти з швидкістю (рад*кГц/сек) в1. Спосіб зондування ретранслятора що використовує зондсигнал з лінійним перестроюванням частоти з швидкістю (рад*кГц/сек) в діапазоні частот від до
Попередній патент: Фуркальний вимірювач
Наступний патент: Спосіб нівелювання
Випадковий патент: Спосіб виконання косметичного комбінованого шва для ушивання рани після операцій на молочній залозі