Панорамний оптико-електронний сканувальний пристрій для аерознімання
Номер патенту: 108044
Опубліковано: 10.03.2015
Автори: Пономаренко Сергій Олексійович, Станкевич Сергій Арсенійович, Федотов Борис Микитович
Формула / Реферат
Панорамний оптико-електронний сканувальний пристрій для аерознімання, що містить оптичну систему, декілька окремих або об'єднаних у фотоприймальну матрицю фотоприймальних лінійок, регістри виводу, рядковий буфер, суматори, кількість яких дорівнює кількості лінійок або рядків в матриці, входи яких підключені до виходів регістрів виводу, декодери адреси по числу суматорів, входи яких підключені до виходів суматорів, віднімачі, кількість яких також дорівнює кількості лінійок або рядків в матриці, входи яких підключені до виходів декодерів адреси таким чином, щоб кожний поточний суматор був підключений до позитивного, а наступний - до негативного входу поточного віднімача, а виходи - до рядкового буфера, накопичувач зображення, схему управління і тактовий генератор, який відрізняється тим, що фотоприймальні лінійки або фотоприймальну матрицю розташовано вздовж напрямку польоту, а перед оптичною системою знімального приладу встановлено оптико-механічний дефлектор, виконаний з можливістю обертання, для забезпечення сканування місцевості миттєвим полем зору фотоприймальних лінійок або фотоприймальної матриці поперек напрямку польоту в заданому куті огляду.
Текст
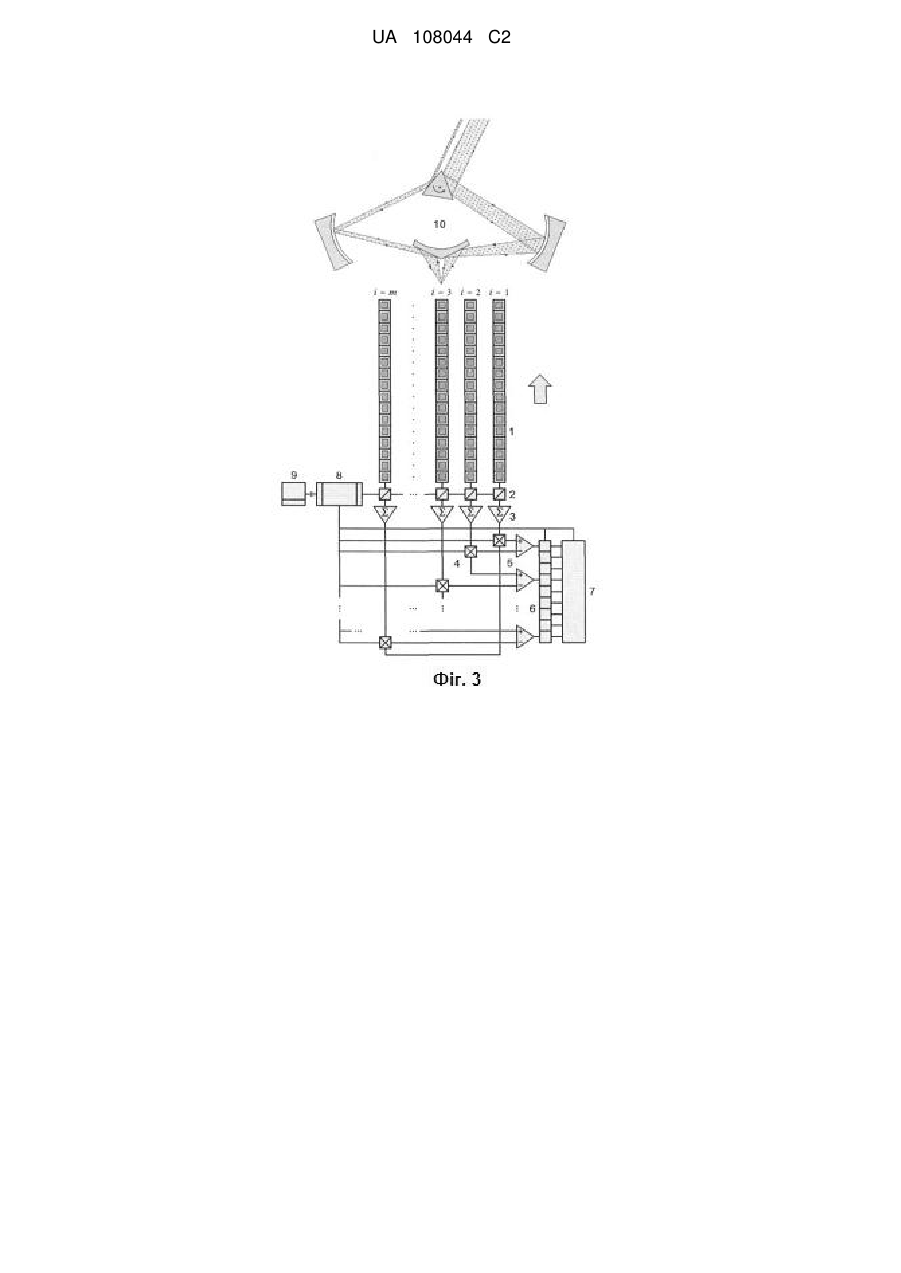
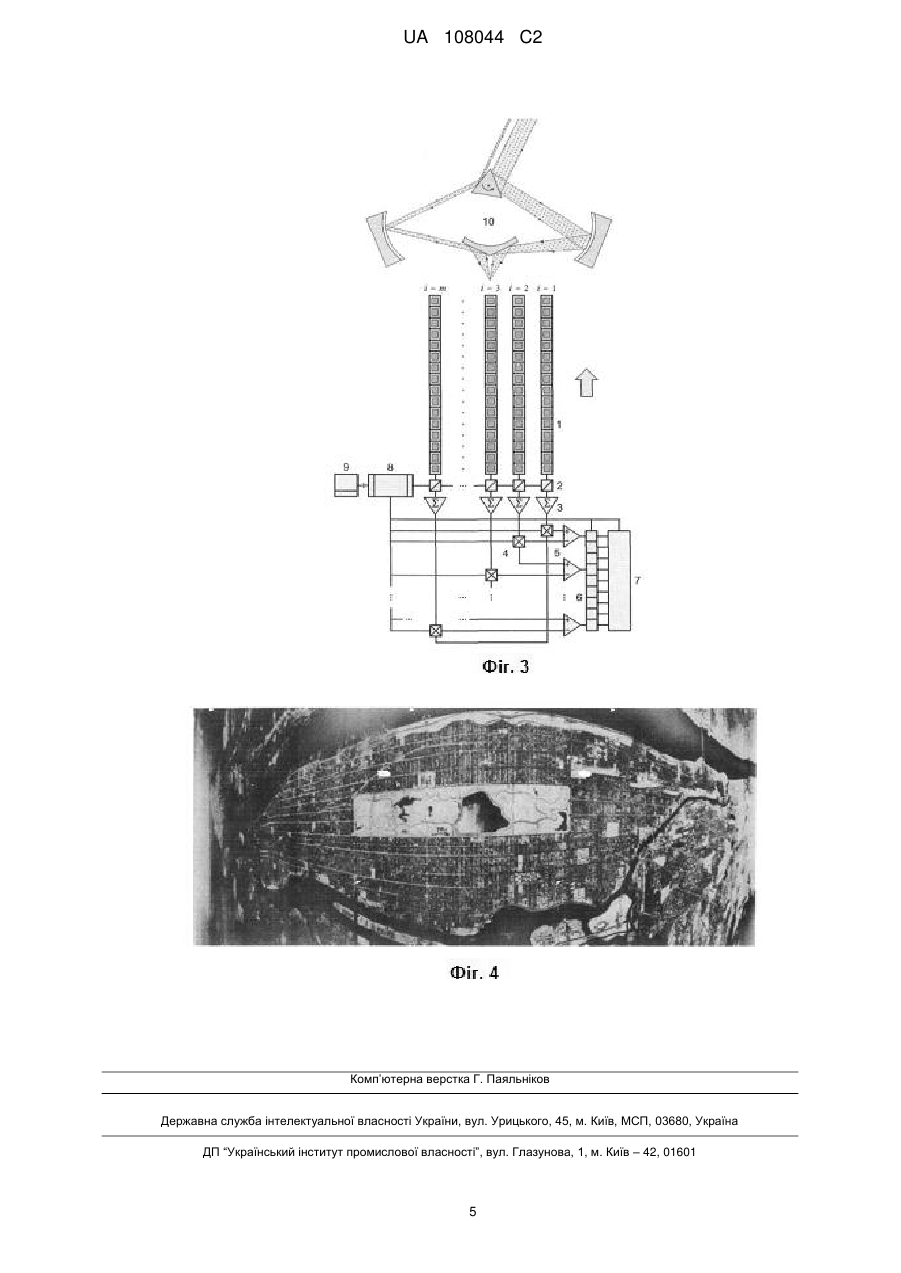
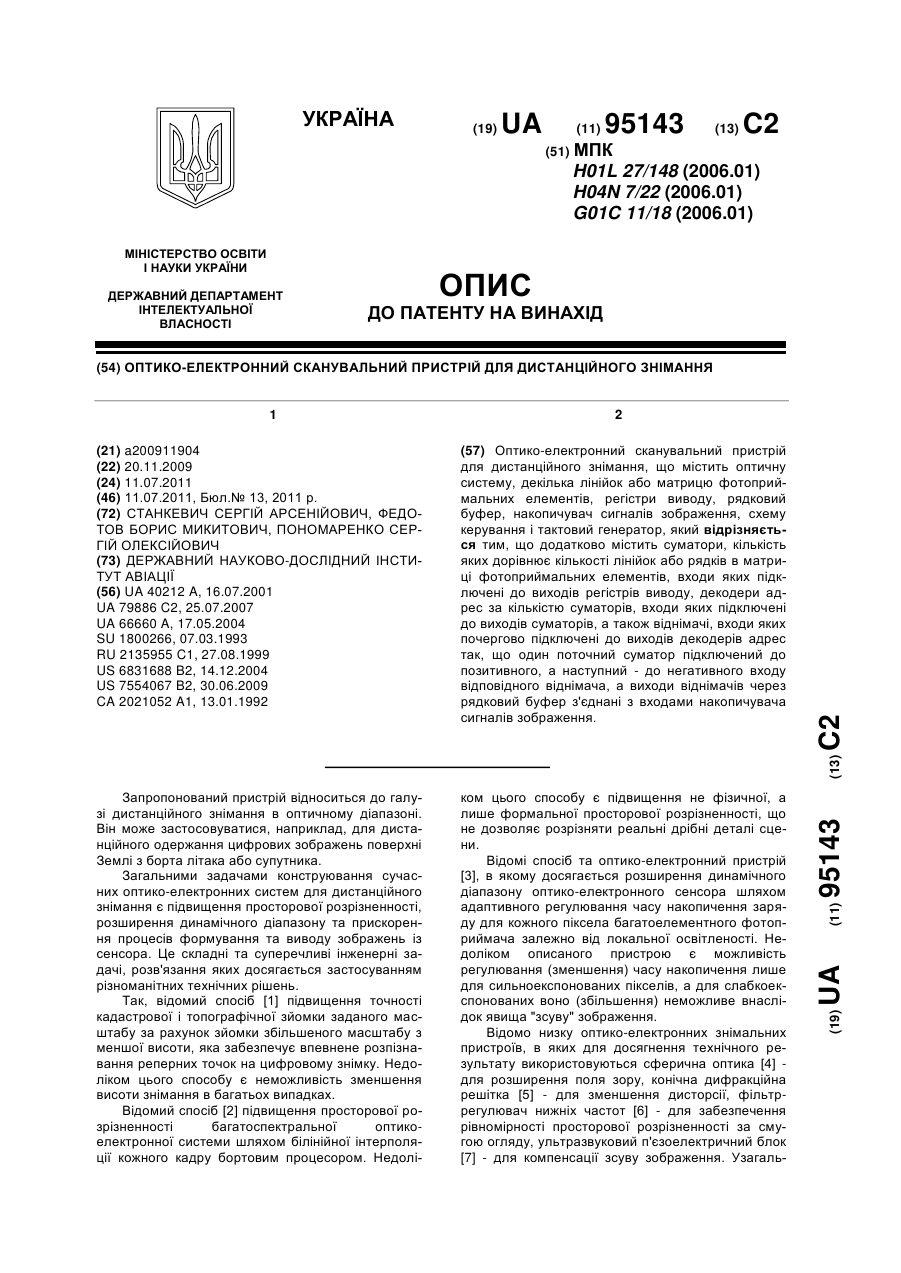
Реферат: Винахід належить до галузі дистанційного знімання в оптичному діапазоні. Він може застосовуватися для дистанційного знімання з борта літака або безпілотного літального апарата. Панорамний оптико-електронний сканувальний пристрій для аерознімання містить декілька фотоприймальних лінійок або фотоприймальної матриці відповідної розмірності, розташованих вздовж напрямку польоту, регістри виводу, рядковий буфер, суматори, декодери адреси, віднімачі, схему управління та тактовий генератор. Також пристрій містить оптикомеханічний дефлектор з можливістю обертання для сканування місцевості миттєвим полем зору. Технічним результатом винаходу є збільшення поперечного кута огляду без нарощування кількості фотодетекторів в лінійковому фотоприймачі. UA 108044 C2 (12) UA 108044 C2 UA 108044 C2 5 10 15 20 25 30 35 40 45 50 55 Запропоноване технічне рішення є оптико-електронним пристроєм, що належить до галузі дистанційного знімання в оптичному діапазоні. Він може застосовуватися, наприклад, для дистанційного одержання цифрових зображень місцевості з борта літака або безпілотного літального апарата. Для аерознімання важливим є одержання зображень великої площі місцевості з малих і середніх висот. Для цього така характеристика аерознімального пристрою як поперечний (перпендикулярно напрямку руху носія) кут огляду місцевості повинен бути досить великим, в ідеалі - наближеним до 160-180°. Збільшення поперечного кута огляду при одночасному збереженні просторової розрізненості на місцевості є важливою інженерно-конструкторською задачею при створенні сучасних авіаційних оптико-електронних знімальних систем. Отже, для більшості існуючих зразків цифрових аерознімальних камер поперечний кут огляду не перевищує 30-90° [1]. Просте збільшення кількості фотодетекторів у рядку фотоприймального пристрою не вирішує цієї проблеми: наприклад, навіть застосування найсучасніших фотоприймальних лінійок з граничною максимальною кількістю фотодетекторів k=20 000 забезпечує при аерозніманні з висоти Н=600 м з просторовою розрізненістю на місцевості d=0,1 м кут огляду лише 118°. Задля збільшення кута огляду оптико-електронної аерознімальної апаратури можуть застосовуватися різноманітні технічні рішення: формування панорамного зображення, що вирівнюється по приблизно сферичній поверхні за допомогою масиву мікролінз з оптичними осями, трохи відхиленими одна відносно однієї [2]; безшовна зшивка зображень неоднорідної розрізненості від багатокамерної знімальної апаратури [3]; оптичне мультиплексування декількох полів огляду знімальної апаратури [4]; сукупність оптичних призм, що забезпечують паралельний огляд декількох смуг місцевості [5]; одночасна багатокамерна зйомка декількох оглядових і декількох детальних зображень з меншою величиною перекриття [6]; формування композитного зображення з декількох полів зйомки в межах широкого кута огляду [7]. Загальним недоліком всіх зазначених способів та пристроїв є необхідність використання декількох оптичних трактів для формування зображення з розширеним кутом огляду - окремих камер, окремих оптичних систем, інколи - окремих фотоприймачів, що суттєво ускладнює конструкцію, погіршує масогабаритні характеристики та підвищує вартість аерознімальної апаратури. Історично проблему збільшення кута огляду для аерофотоапаратів (АФА) було досить ефективно вирішено впровадженням у кінці 1940-х - початку 1950-х років панорамного принципу аерознімання. Панорамне аерознімання полягає у скануванні місцевості пласким полем огляду у напрямку, перпендикулярному напрямку польоту (фіг. 1). Панорамне зображення складається з послідовності панорамних кадрів. Головною перевагою панорамного аерознімання є дуже великі кути поперечного огляду місцевості - аж до 180°. Панорамні АФА (фіг. 2а - конструкція панорамного АФА Vinten F.85) масово виготовлялися, в основному для ведення повітряної розвідки (фіг. 26 - серійний розвідувальний панорамний АФА Fairchild KS-120A), і завдяки своїй високій ефективності практично витіснили інші типи АФА з мало- та середньовисотної аерофотозйомки [8]. Проблема знов виникла при переході від фотографічних до цифрових технологій аерознімання і її знов таки було вирішено за допомогою панорамного принципу аерознімання (фіг. 2в - серійна авіаційна розвідувальна панорамна цифрова камера Thales Type 8042EO). Відомий спосіб та система для безпосереднього панорамного цифрового аерознімання [9] аналог, в якому замість аерофотоплівки реєстрацію зображень здійснюється лінійковим багатоелементним фотоприймачем, розташованим у фокальній площині оптичної системи вздовж напрямку польоту, а сканування місцевості поперек напрямку польоту здійснюється обертовим оптико-механічним пристроєм. Недоліком аналога є дуже малий час, що відводиться на накопичення та виведення зарядів з фотоприймача. Справді, припустимий час формування панорамного кадру t фотоприймальною лінійкою з k фотодетекторів буде t l k d , (1) V V 1 UA 108044 C2 за цей час потрібно сформувати і вивести огляду, поперечна кутова 2 рядків зображення, тут 2 - поперечний кут розрізненість аерознімання. З умови геометричного невикривлення зображення остання має дорівнювати подовжній кутовій розрізненості максимально припустимий час формування одного рядка складе 5 10 15 20 25 30 35 40 45 50 d звідки H t k d2 . (2) 2 2 H V Для типових значень k=8000, d=0,1 м, 2β= 160°, H=600 м, V=250 м/с на формування і виведення одного рядка панорамного зображення буде надано не більш τ=0,19 мс. На практиці цей час має бути ще меншим, щоб мінімізувати зсув зображення внаслідок руху носія та нелінійні фотограмметричні викривлення одержуваного зображення, пов'язані з реєстрацією різних рядків з різних точок траєкторії. Все це потребує суттєвого прискорення процесів формування та виводу зображень із фотоприймача. В разі високої просторової розрізненості, великих кутів огляду та швидкостей польоту припустимий час експонування стає недостатнім для повного накопичення заряду в фотодетекторах лінійкового фотоприймача, що різко понижує відношення "сигнал-шум" в системі і навіть може унеможливити формування зображення. Дана суперечність викликає серйозні технічні проблеми при створенні панорамних оптико-електронних знімальних пристроїв. Для зменшення часу формування зображень використовуються різноманітні технічні рішення - паралельне зчитування сигналів з декількох субматриць спільної фот приймальної матриці [10], додавання зарядів від декількох рядків фотоприймальної матриці для збільшення відношення "сигнал-шум" [11], сканування декількома парами лінійок фотоприймальних елементів, причому лінійки в парі зміщені одна відносно одної на половину розміру фотодетектора [12]. Недоліками таких технічних рішень є зменшення лише часу виведення зображення, а не накопичення зарядів, або погіршення просторової розрізненості. Найбільш близьким до способу, що пропонується, є оптико-електронний сканувальний пристрій [13] - прототип, що містить оптичну систему, декілька лінійкових або матричний фотоприймач, накопичувач сигналів зображення, суматори, кількість яких дорівнює кількості лінійок або рядків в матричному фотоприймачі та віднімачі накопичуваних сигналів зображення. Розпаралелення на декілька лінійок дозволяє збільшити припустимий час накопичення заряду у відповідну кількість разів, а віднімання сигналів від попередніх по ходу зображення лінійок забезпечує збереження просторової розрізненості зйомки. Правильна послідовність операцій забезпечується схемою управління, синхронізація виконується за відліками тактового генератора. Недоліком прототипу є недостатній поперечний кут огляду, який залежить від кількості фотодетекторів в фотоприймачі. І якщо для лінійкових фотоприймачів видимого та ближнього інфрачервоного діапазонів досягнута кількість в декілька тисяч фотодетекторів забезпечує кут поперечного огляду, прийнятний принаймні для топографічного аерознімання, то для сучасних неохолоджуваних фотоприймачів дальнього інфрачервоного (теплового) діапазону досягнута кількість в декілька сотень фотодетекторів в принципі не дозволяє створювати лінійкові аерознімальні системи високої розрізненості. Тому на практиці досі використовуються інфрачервоні аерознімальні системи з відрядковим оптико-механічним скануванням. Для подолання вказаного недоліку прототипу пропонується використати панорамний принцип аерознімання, тобто, розташувати набір фотоприймальних лінійок або фотоприймальну матрицю відповідної розмірності не поперек, а вздовж напрямку польоту носія, а перед об'єктивом оптичної системи знімального приладу встановити оптико-механічний дефлектор 10, виконаний у вигляді дзеркала, призми або дифракційної ґратки. При обертанні дефлектора буде забезпечуватись послідовне сканування місцевості миттєвим полем зору багатолінійкового фотоприймача поперек напрямку польоту в наперед заданому куті огляду, формуючи таким чином панорамний кадр зображення. В ході поступального руху літального апарата цикл формування панорамного кадру повторюється з такою частотою, щоб забезпечити нерозривне знімання смуги місцевості. Чим більша швидкість польоту, тим меншим буде накопичений заряд лінійок. Кількість фотоприймальних лінійок або рядків фотоприймальної матриці вибирається такою, щоб забезпечити час накопичення заряду, достатній згідно з (2) для одержання якісного зображення в самих складних режимах знімання, тобто на мінімальних висотах польоту з максимальною швидкістю. 2 UA 108044 C2 5 10 15 20 25 30 35 40 45 50 55 В такий спосіб реалізується панорамний оптико-електронний сканувальний пристрій для аерознімання. Склад і функціонування пристрою, що пропонується, пояснюється схемою фіг. 3. Місцевість сканується поперек напрямку польоту оптико-механичним дефлектором 10 з метою формування панорамного кадру. Зображення m рядків панорамного кадру через оптичну систему проектується на m фотоприймальних лінійок 1 або фотоприймальну матрицю з m рядків. З початку поперечного сканування місцевості дефлектором 10 з періодом m , де визначається формулою (2), сигнали з кожної лінійки записуються в регістри виводу 2, кількість яких дорівнює числу лінійок m , і надходять до суматорів 3, кількість яких також дорівнює m , де накопичуються протягом всього знімання. Далі за допомогою декодерів адреси 4 виконується послідовне подання накопичених в кожному і-му та наступному і+1-му суматорах величин на входи віднімачів 5 таким чином, щоб поточний суматор був підключений до позитивного входу віднімача, а наступний - до негативного. Тобто в кожному і-му віднімачі формується значення x n поточного n-го рядка сцени. Сигнали рядків сцени записуються в рядковий буфер 6, звідки передаються до бортового накопичувача зображення 7, де зберігається поточний панорамний кадр зображення. По завершенні формування панорамного кадру увесь цикл повторюється для формування наступного панорамного кадру. За умови нерозривності послідовності кадрів період їх повторення t не повинен перевищувати величини, що визначається формулою (1). Регулювання частоти кадрів здійснюється встановленням відповідної частоти обертання оптико-механічного дефлектора. Правильна послідовність операцій забезпечується схемою управління 8, синхронізація виконується за відліками тактового генератора 9. В запропонованому пристрої фактичний час накопичення заряду в фотоприймачі збільшується в m разів при збереженні просторової розрізненості у порівнянні з аналогом з такими ж параметрами. Збільшення часу накопичення заряду суттєво підвищує відношення "сигнал-шум" без внесення зсуву зображення, що є дуже важливим для оптико-електронних сканувальних систем, призначених для аерознімання з малих висот на великих швидкостях польоту. Можливість панорамного аерознімання місцевості запропонованим оптико-електронним пристроєм підтверджується результатами комп'ютерного моделювання формування реального панорамного кадру довжиною 449 та шириною 1052 пікселів за допомогою описаного панорамного сканеру з кількістю лінійок m=4. Одержане тестове зображення показано на фіг. 4, воно ідеально відтворює вхідне реальне панорамне зображення місцевості, наведене в [14]. Використані джерела 1. Petrie G., Smillie K. Airborne digital imaging sensors and systems // Advances in Photogrammetry, Remote Sensing and Spatial Information Sciences / Ed. by E. Baltsavias, Z. Li, and J. Chen.- London: CRC Press, 2008.-P.45-62. 2. Wirth A., Jankevics A.J., Landers F.M., Bruno T.L., D'Amato D.P., Schmutz L.E., Gilligan L.H… Duncan J.L. Micro-lens panoramic imager.- United States Patent No 5291334, 1994. 3. Baker H.H., Tanguay Jr. D.O. Method and system for producing seamless composite images having non-uniform resolution from a multi-imager system-United States Patent No 7855752, 2010. 4. Achal S., Anger C. Optically multiplexed imaging system and methods of operation. - United States Patent No 7884931, 2011. 5. Rosenblum E., Yavin Z. Airborne reconnaissance system. - United States Patent No 8223202,2012. 6. Nixon S.W. Systemr and methods of capturing large area images in detail including cascaded cameras and/or calibration features. - United States Patent No 8497905, 2013. 7. Miyamoto N., Matsumoto K. Imaging apparatus, imaging method and recording medium with program recorded therein. - United States Patent No 8619120,2013. 8. Ребрин Ю.К. Оптико-электронное разведывательное оборудование летательных аппаратов.- Киев: КВВАИУ, 1988.-452 с. 9. Hedges T.M., Weir D.G., Speasl J.A. Direct digital airborne panoramic camera system and method. - United States Patent No 5999211, 1999. 10. Lareau A.G., Speer В., Pfister W.R., Beran S.R., Swartz В., Karins J.P., Lintell R.J., Warren C.P. Multispectral or hyperspectral imaging system and rrethod for tactical reconnaissance.- United States Patent No 6831688, 2004. 11. Anger CD., Babey S.K. Pushbroom spectrographic imager. - Canadian Patent No 2021052, 1995. 12. Zarnowski J.J., Karia, K.V., Joyner M., Poonnen Т., Liu Li. Scanning imager employing multiple chips with staggered pixels.- United States Patent No 7554067, 2009. 3 UA 108044 C2 13. Станкевич С.А., Федотов Б.М., Пономаренко CO. Оптико-електронний сканувальний пристрій для дистанційного знімання. - Патент України на винахід № 95143, 2011. 14. Huang F., Klette R., Scheibe K. Panoramic Imaging: Sensor-Line Cameras and Laser RangeFinders. - Chichester: John Wiley, 2008.-284 p. 5 ФОРМУЛА ВИНАХОДУ 10 15 20 Панорамний оптико-електронний сканувальний пристрій для аерознімання, що містить оптичну систему, декілька окремих або об'єднаних у фотоприймальну матрицю фотоприймальних лінійок, регістри виводу, рядковий буфер, суматори, кількість яких дорівнює кількості лінійок або рядків в матриці, входи яких підключені до виходів регістрів виводу, декодери адреси по числу суматорів, входи яких підключені до виходів суматорів, віднімачі, кількість яких також дорівнює кількості лінійок або рядків в матриці, входи яких підключені до виходів декодерів адреси таким чином, щоб кожний поточний суматор був підключений до позитивного, а наступний - до негативного входу поточного віднімача, а виходи - до рядкового буфера, накопичувач зображення, схему управління і тактовий генератор, який відрізняється тим, що фотоприймальні лінійки або фотоприймальну матрицю розташовано вздовж напрямку польоту, а перед оптичною системою знімального приладу встановлено оптико-механічний дефлектор, виконаний з можливістю обертання, для забезпечення сканування місцевості миттєвим полем зору фотоприймальних лінійок або фотоприймальної матриці поперек напрямку польоту в заданому куті огляду. 4 UA 108044 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюStankevych Serhii Arseniiovych, Ponomarenko Serhii Oleksiiovych
Автори російськоюСтанкевич Сергей Арсениевич, Пономаренко Сергей Алексеевич
МПК / Мітки
МПК: G01C 11/18, H04N 7/22, G03B 37/00, H01L 27/148, H04N 7/18
Мітки: аерознімання, оптико-електронний, сканувальний, пристрій, панорамний
Код посилання
<a href="https://ua.patents.su/7-108044-panoramnijj-optiko-elektronnijj-skanuvalnijj-pristrijj-dlya-aeroznimannya.html" target="_blank" rel="follow" title="База патентів України">Панорамний оптико-електронний сканувальний пристрій для аерознімання</a>
Оптико-електронний сканувальний пристрій для дистанційного знімання
Номер патенту: 95143
Опубліковано: 11.07.2011
Автори: Пономаренко Сергій Олексійович, Федотов Борис Микитович, Станкевич Сергій Арсенійович
МПК: H01L 27/148, G01C 11/18, H04N 7/22
Мітки: оптико-електронний, знімання, пристрій, дистанційного, сканувальний
Формула / Реферат:
Оптико-електронний сканувальний пристрій для дистанційного знімання, що містить оптичну систему, декілька лінійок або матрицю фотоприймальних елементів, регістри виводу, рядковий буфер, накопичувач сигналів зображення, схему керування і тактовий генератор, який відрізняється тим, що додатково містить суматори, кількість яких дорівнює кількості лінійок або рядків в матриці фотоприймальних елементів, входи яких підключені до виходів регістрів...
Оптико-електронний пристрій для аерофотозйомки
Номер патенту: 73299
Опубліковано: 15.07.2005
Автори: Крельштейн Петро Давидович, Летучий Олег Маркович, Панченко Антон Олегович, Бурачек Всеволод Германович, Радченко Микола Васильович
МПК: G02B 13/08, G03B 37/00
Мітки: оптико-електронний, пристрій, аерофотозйомки
Формула / Реферат:
1. Оптико-електронний пристрій для аерофотозйомки, що містить об'єктиви, багатоелементні фотоприймачі, електронні блоки запису інформації та пам'яті, що утворюють оптико-електронні канали, об'єктиви (яких як мінімум два) жорстко закріплені в єдиному блоці в оправі в корпусі, який відрізняється тим, що оптичні осі об'єктивів розміщені під кутом відносно один одного симетрично до діаметральної площини носія і в площині, що перпендикулярна до...
Панорамний оптико-телевізійний прилад

Номер патенту: 83796
Опубліковано: 25.09.2013
Автори: Піронер Ян Михайлович, Стецюк Володимир Леонтійович, Гузь Володимир Іванович, Долеско Анатолій Олександрович, Баранчук Олександр Іванович
МПК: G02B 23/12
Мітки: панорамний, оптико-телевізійний, прилад
Формула / Реферат:
Панорамний оптико-телевізійний прилад, що містить оптико-електронний модуль, обертовий контактний пристрій, привідний механізм, причому оптико-електронний модуль складається з герметичного корпусу, в якому встановлені оптичний об'єктив з керованою шторкою, телевізійна камера, захисне скло зі струмопровідним покриттям для підігріву скла, перетворювач електроживлення та модуль живлення телекамери, кришка зі світлофільтром, а привідний механізм...
Оптико-електронний пристрій для фототерапії ока

Номер патенту: 89908
Опубліковано: 12.05.2014
Автори: Салдан Йосип Романович, Вовкотруб Діна Вікторівна, Камінський Олександр Станіславович, Павлов Сергій Володимирович
МПК: A61B 3/06
Мітки: фототерапії, пристрій, оптико-електронний, ока
Формула / Реферат:
Оптико-електронний пристрій для фототерапії ока, який містить джерело ультрафіолетового випромінювання у вигляді світлодіодів синього та ультрафіолетового випромінювання, оптичну систему, що являє собою камеру для змішування оптичного випромінювання, блок керування, рідинно-кристалічний дисплей, причому матриця світлодіодів оптично пов'язана з камерою змішування оптичного випромінювання, блок керування електрично пов'язаний з...
Оптико-електронний пристрій дослідження дна ока
Номер патенту: 15907
Опубліковано: 17.07.2006
Автори: Салдан Йосип Романович, Білинський Йосип Йосипович, Бабій Артем Олександрович
МПК: A61B 3/06
Мітки: дослідження, оптико-електронний, дна, пристрій, ока
Формула / Реферат:
Оптико-електронний пристрій дослідження дна ока, який містить джерело світла, оптичну систему, світловод, який відрізняється тим, що в нього введено фотошар, фотоматрицю, щонайменше чотири світлодіоди, рідинно-кристалічний дисплей, мікропроцесорну систему, блок цифро-аналогових перетворювачів, електронний блок керування, причому вихід фотошару оптично зв'язаний з входом світловоду, вихід світловоду оптично зв'язаний з входом оптичної системи,...
Попередній патент: Проточний нагрівач роторного типу
Наступний патент: Шафа для взуття
Випадковий патент: Спосіб і пристрій для отримання функціонального продукту із ягід у вигляді пасти з подрібненим насінням та оболонками і продукт, одержаний таким способом