Спосіб вимірювання фазового зсуву
Формула / Реферат
Спосіб вимірювання фазового зсуву між двома гармонічними сигналами ![]() та
та ![]() з нерівними амплітудами, за яким вимірюють амплітудне значення
з нерівними амплітудами, за яким вимірюють амплітудне значення ![]() одного з сигналів, який відрізняється тим, що перед вимірюванням амплітудного значення
одного з сигналів, який відрізняється тим, що перед вимірюванням амплітудного значення ![]() проводять вирівнювання амплітуд сигналів
проводять вирівнювання амплітуд сигналів ![]() та
та ![]() , не змінюючи їх початкових фаз, і отримують сигнали
, не змінюючи їх початкових фаз, і отримують сигнали ![]() та
та ![]() , формують різницю сигналів
, формують різницю сигналів ![]() , підсилюють різницевий сигнал
, підсилюють різницевий сигнал ![]() в
в ![]() разів, вимірюють миттєве значення підсиленого різницевого сигналу
разів, вимірюють миттєве значення підсиленого різницевого сигналу ![]() в момент
в момент ![]() , коли миттєве значення другого сигналу
, коли миттєве значення другого сигналу ![]() дорівнює нулю і визначають фазовий зсув
дорівнює нулю і визначають фазовий зсув ![]() за формулою
за формулою
![]() ,
,
де ![]() - коефіцієнт підсилення;
- коефіцієнт підсилення;
![]() - стала, що дорівнює коефіцієнту підсилення
- стала, що дорівнює коефіцієнту підсилення ![]() .
.
Текст
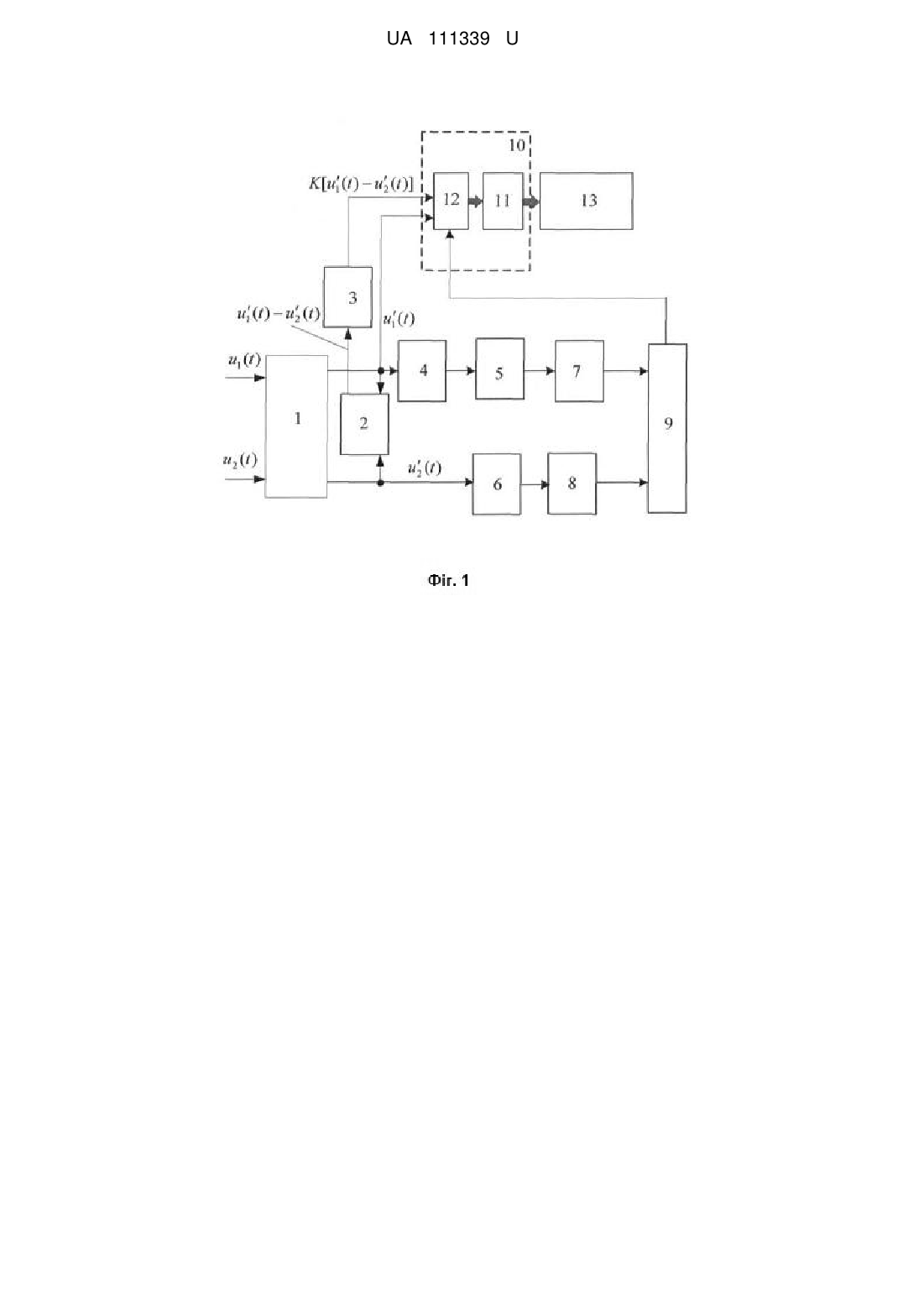
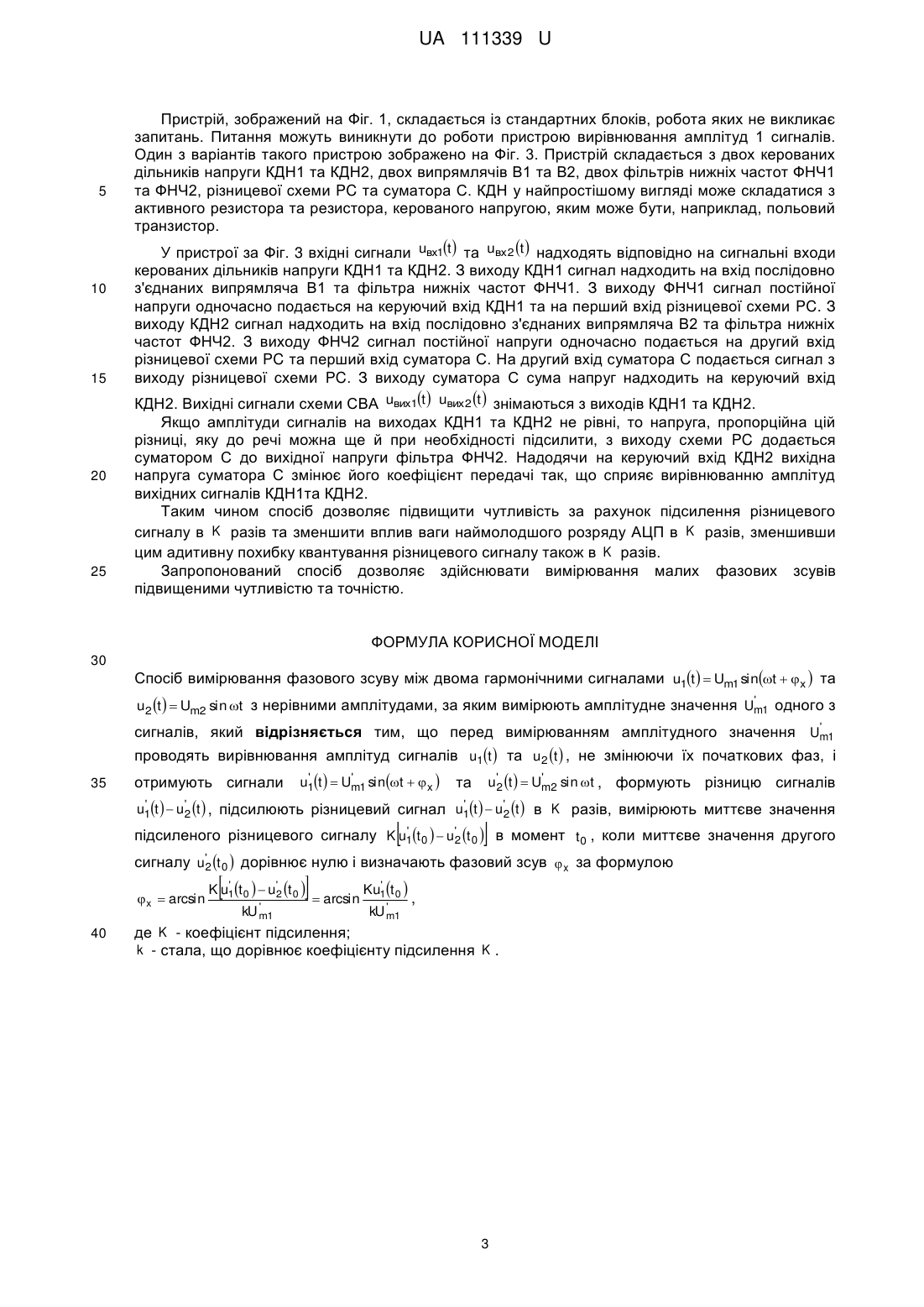
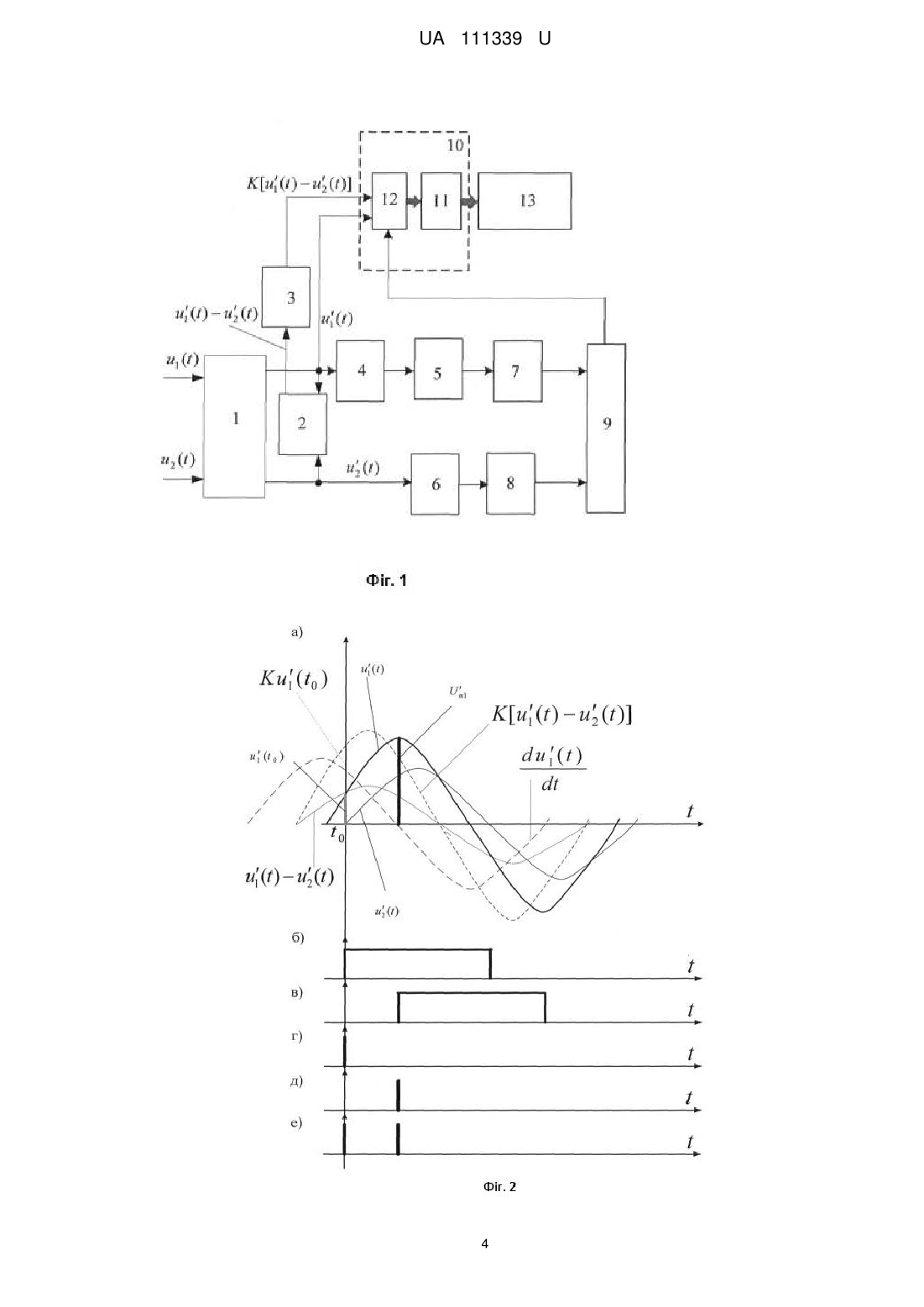
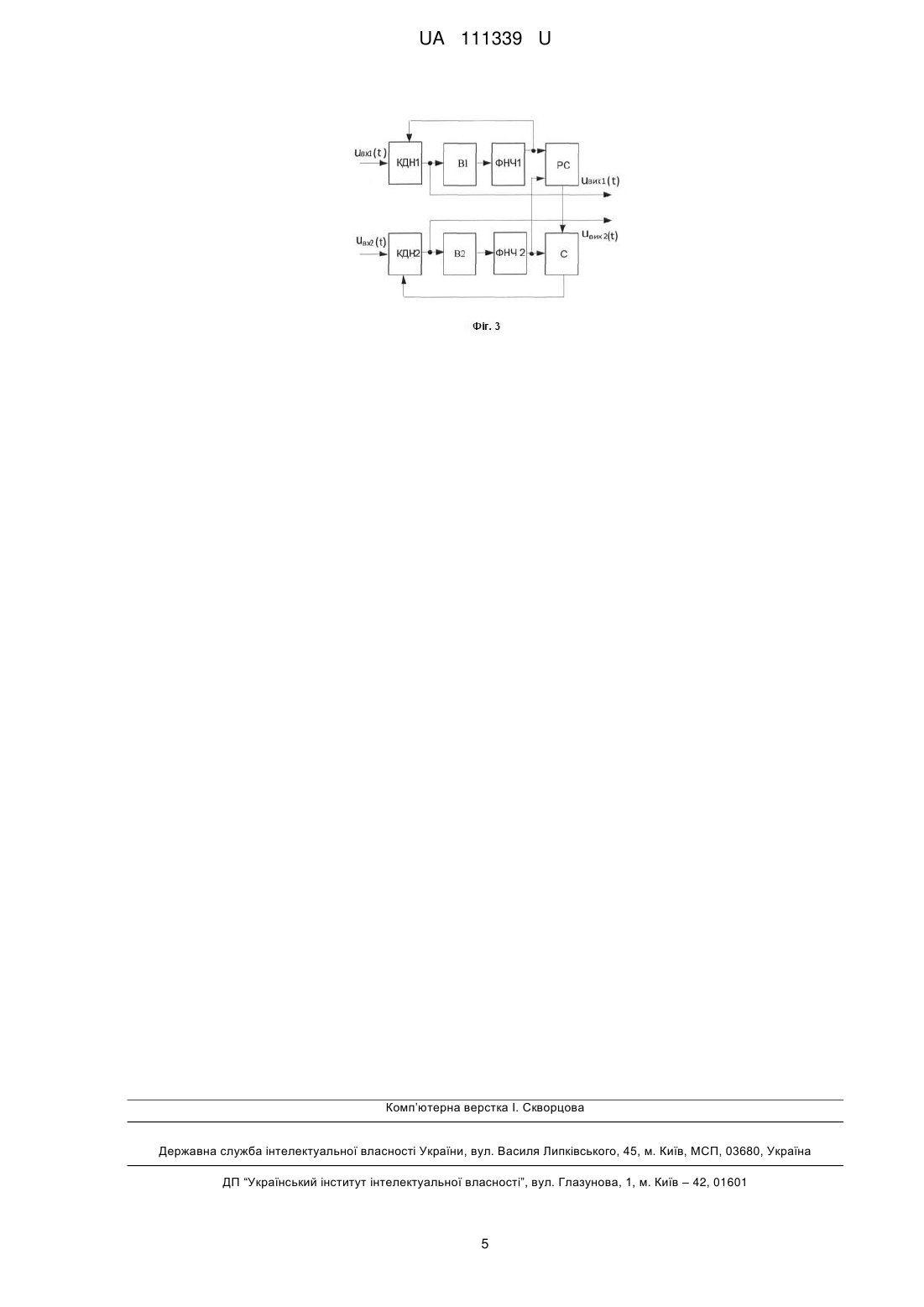
Реферат: UA 111339 U UA 111339 U 5 Корисна модель належить до техніки вимірювання фазових зсувів між двома гармонічними сигналами з різними амплітудами і може бути використана для підвищення чутливості перетворювачів фазового зсуву в цифровий код, що застосовуються в системах електророзвідки родовищ поліметалічних руд, системах діагностики корозійного стану великогабаритних сталевих листових конструкцій тощо. Відомий спосіб вимірювання фазового зсуву, який полягає в тому, що вимірюють амплітудне значення Um1 одного з сигналів та його миттєве значення u1t 0 в момент t 0 , коли миттєве значення другого сигналу u2 t 0 дорівнює нулю, і за формулою x arcsin 10 15 20 u1t 0 Um1 визначають фазовий зсув x . [Патент на корисну модель № 104350, UA Україна, МПК G01R 25/00. Спосіб вимірювання фазового зсуву / Бучма І.М., Дронь М.І. (Україна). № заявки: u201506942, заявл. 13.07.2015, опубл.: 25.01.2016, Бюл. № 2]. Однак такий спосіб непрямого вимірювання фазового зсуву характеризується невисокою чутливістю та значною адитивною похибкою. В основу корисної моделі поставлено задачу створення способу вимірювання фазового зсуву між гармонічними сигналами з підвищеною чутливістю та з меншою адитивною похибкою. Поставлена задача вирішується тим, що в способі вимірювання фазового зсуву між двома гармонічними сигналами u1t Um1 sint x та u2 t Um2 sin t , де - кутова частота, c 1 , ' з нерівними амплітудами, за яким вимірюють амплітудне значення Um1 одного з сигналів, ' згідно з корисною моделлю, перед вимірюванням амплітудного значення Um1 проводять 25 вирівнювання амплітуд сигналів u1t та u2 t , не змінюючи їх початкових фаз, і отримують сигнали ' ' u1t Um1 sint x та ' u'2 t Um2 sin t , формують різницю сигналів ' u1t u'2 t , ' ' підсилюють різницевий сигнал u1t u2 t в K разів, вимірюють миттєве значення підсиленого ' ' ' різницевого сигналу K u1t 0 u2 t 0 в момент t 0 , коли миттєве значення другого сигналу u2 t 0 дорівнює нулю, і визначають фазовий зсув x за формулою x arcsin ' Ku1t 0 30 ' kU m1 , (1) де K - коефіцієнт підсилення; k - стала, що дорівнює коефіцієнту підсилення K . Це дозволяє збільшити чутливість при визначенні фазового зсуву за рахунок підсилення різницевого сигналу u1t u2 t у K разів та зменшити похибку вимірювання фазового зсуву, оскільки це дозволяє зменшити в K разів адитивну похибку квантування АЦП, яка звичайно визначається ціною наймолодшого розряду. Збільшення чутливості визначається коефіцієнтом підсилення K , яке можна оцінити відношенням ' 35 K ' Uddgr URm , де Uddgr - верхня границя динамічного діапазону АЦП мікроконтролера; 40 ' URm - амплітуда різницевого сигналу u1t u'2 t . Зменшення адитивної похибки отримуємо також у K разів, а сама похибка оцінюється виразом ad 1 Nmax K де Nmax - верхня границя діапазону перетворення АЦП. 1 UA 111339 U 5 На Фіг. 1 зображено пристрій, в якому реалізується вимірювання зсуву фаз між двома гармонічними сигналами у відповідності з пропонованим способом. На Фіг. 2 - часові діаграми роботи пристрою. На Фіг. 3 - пристрій для вирівнювання амплітуд гармонічних сигналів. Спосіб вимірювання фазового зсуву здійснюється так: вирівнюють амплітуди порівнюваних ' ' ' ' сигналів u1t та u2 t , отримують сигнали u1 t та u2 t , вимірюють амплітуду Um1 сигналу u1 t , ' ' формують різницевий сигнал u1t u2 t та підсилюють його в K разів, вимірюють миттєве ' ' значення підсиленого різницевого сигналу K u1t 0 u2 t 0 в момент t 0 , коли миттєве значення ' другого сигналу u 2 t дорівнює нулю, і за формулою x arcsin 10 ' Ku1t 0 ' kU m1 , (1) де K - коефіцієнт підсилення; k - стала, що дорівнює коефіцієнту підсилення K , визначають фазовий зсув x між двома гармонічними сигналами u1t та u2 t . Приклад реалізації пропонованого способу вимірювання фазового зсуву пояснюється на фіг. 15 1. 20 Пристрій згідно з фіг. 1 складається із пристрою вирівнювання амплітуд 1 сигналів, різницевої схеми 2, підсилювача 3, диференціатора 4, компараторів 5 і 6, одновібраторів 7 та 8, логічної схеми АБО 9, мікроконтролера 10, з вбудованими оперативною пам'яттю RAM 11 та аналого-цифровим перетворювачем АЦП 12, який має кілька аналогових входів, що під'єднуються до нього програмним шляхом, та дисплея 13. Пристрій працює наступним чином. Вхідні сигнали u1t та u2 t надходять на входи схеми ' ' вирівнювання амплітуд 1, на виході якої отримуємо сигнали u1 t та u 2 t (Фіг. 2а), що мають приблизно рівні амплітуди та не змінені початкові фази. При цьому вихідний сигнал u1 t схеми вирівнювання амплітуд 1 одночасно надходить на диференціатор 4 та на перший аналоговий ' 25 ' вхід АЦП мікроконтролера 10, a u 2 t - на вхід компаратора 6. Різницева схема 2 формує ' ' різницю сигналів u1t u2 t (Фіг. 2а). Ця різниця підсилюється підсилювачем 3 в K разів (Фіг. 1) і ' надходить на другий аналоговий вхід АЦП мікроконтролера 10. Сигнал u 2 t компаратором 6 перетворюється у прямокутний імпульс (Фіг. 2б), фронт якого співпадає з моментом t 0 переходу сигналу u 2 t через нуль. Одновібратор 8 у момент цього фронту формує короткий імпульс (Фіг. 2г), який проходять через логічну схему АБО 9 та запускає АЦП 12 мікроконтролера 10, який перетворює миттєве значення різницевого сигналу ' 30 ' ' K u1t 0 u'2 t 0 Ku1t 0 в цифровий код, що запам'ятовується в одній з комірок пам'яті RAM 11. Сигнал 35 ' u1 t 2 зсувається диференціатором 4 за фазою на перетворюється у прямокутний імпульс, фронт якого співпадає з моментом, у який сигнал u1 t приймає амплітудне значення (Фіг. 2а, в) По фронту цього прямокутного імпульсу одновібратор 7 формує короткий імпульс (Фіг. 2д), що також проходить через логічну схему АБО 9 і запускає ' АЦП 12 мікроконтролера 10, який перетворює амплітудне значення Um1 сигналу u1 t , що діє в цей час на першому аналоговому вході АЦП 12, у цифровий код, що запам'ятовується в іншій комірці пам'яті RAM 11. Так забезпечується вимірювання миттєвих значень, а саме: підсиленого різницевого сигналу ' 40 та компаратором 5 ' ' K u1t 0 u'2 t 0 в момент t 0 , коли сигнал u'2 t приймає нульове значення, та в момент, коли ' сигнал u1 t приймає амплітудне значення. Після цього за формулою (1) мікроконтролер 10 обчислює фазовий зсув x , значення якого висвітлюється на дисплеї 13. 2 UA 111339 U 5 10 15 20 25 Пристрій, зображений на Фіг. 1, складається із стандартних блоків, робота яких не викликає запитань. Питання можуть виникнути до роботи пристрою вирівнювання амплітуд 1 сигналів. Один з варіантів такого пристрою зображено на Фіг. 3. Пристрій складається з двох керованих дільників напруги КДН1 та КДН2, двох випрямлячів В1 та В2, двох фільтрів нижніх частот ФНЧ1 та ФНЧ2, різницевої схеми PC та суматора С. КДН у найпростішому вигляді може складатися з активного резистора та резистора, керованого напругою, яким може бути, наприклад, польовий транзистор. У пристрої за Фіг. 3 вхідні сигнали uвх1t та uвх 2 t надходять відповідно на сигнальні входи керованих дільників напруги КДН1 та КДН2. З виходу КДН1 сигнал надходить на вхід послідовно з'єднаних випрямляча В1 та фільтра нижніх частот ФНЧ1. З виходу ФНЧ1 сигнал постійної напруги одночасно подається на керуючий вхід КДН1 та на перший вхід різницевої схеми PC. З виходу КДН2 сигнал надходить на вхід послідовно з'єднаних випрямляча В2 та фільтра нижніх частот ФНЧ2. З виходу ФНЧ2 сигнал постійної напруги одночасно подається на другий вхід різницевої схеми PC та перший вхід суматора С. На другий вхід суматора С подається сигнал з виходу різницевої схеми PC. З виходу суматора С сума напруг надходить на керуючий вхід КДН2. Вихідні сигнали схеми СВА uвих1t uвих 2 t знімаються з виходів КДН1 та КДН2. Якщо амплітуди сигналів на виходах КДН1 та КДН2 не рівні, то напруга, пропорційна цій різниці, яку до речі можна ще й при необхідності підсилити, з виходу схеми PC додається суматором С до вихідної напруги фільтра ФНЧ2. Надодячи на керуючий вхід КДН2 вихідна напруга суматора С змінює його коефіцієнт передачі так, що сприяє вирівнюванню амплітуд вихідних сигналів КДН1та КДН2. Таким чином спосіб дозволяє підвищити чутливість за рахунок підсилення різницевого сигналу в K разів та зменшити вплив ваги наймолодшого розряду АЦП в K разів, зменшивши цим адитивну похибку квантування різницевого сигналу також в K разів. Запропонований спосіб дозволяє здійснювати вимірювання малих фазових зсувів підвищеними чутливістю та точністю. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 Спосіб вимірювання фазового зсуву між двома гармонічними сигналами u1t Um1 sint x та ' u2 t Um2 sin t з нерівними амплітудами, за яким вимірюють амплітудне значення Um1 одного з ' сигналів, який відрізняється тим, що перед вимірюванням амплітудного значення Um1 проводять вирівнювання амплітуд сигналів u1t та u2 t , не змінюючи їх початкових фаз, і 35 отримують сигнали ' ' u1t Um1 sint x ' u'2 t Um2 sin t , формують та різницю сигналів ' ' u1t u'2 t , підсилюють різницевий сигнал u1t u'2 t в K разів, вимірюють миттєве значення ' підсиленого різницевого сигналу K u1t 0 u'2 t 0 в момент t0 , коли миттєве значення другого сигналу x arcsin 40 u'2 t 0 дорівнює нулю і визначають фазовий зсув x за формулою arcsin Ku t ' K u1t 0 u'2 t 0 ' kU m1 ' 1 0 ' kU m1 , де K - коефіцієнт підсилення; k - стала, що дорівнює коефіцієнту підсилення K . 3 UA 111339 U 4 UA 111339 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 27/28, G01R 25/00
Мітки: спосіб, зсуву, вимірювання, фазового
Код посилання
<a href="https://ua.patents.su/7-111339-sposib-vimiryuvannya-fazovogo-zsuvu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання фазового зсуву</a>
Спосіб вимірювання фазового зсуву
Номер патенту: 104350
Опубліковано: 25.01.2016
Автори: Дронь Микола Іванович, Бучма Ігор Михайлович
МПК: G01R 25/00
Мітки: фазового, вимірювання, спосіб, зсуву
Формула / Реферат:
Спосіб вимірювання фазового зсуву, який полягає в тому, що вимірюють амплітудне значення одного з сигналів, який відрізняється тим, що вимірюють миттєве значення цього ж сигналу в момент , коли миттєве значення другого сигналу...
Спосіб вимірювання фазового зсуву
Номер патенту: 55496
Опубліковано: 10.12.2010
Автори: Лігоміна Сергій Миколайович, Кулікова Руслана Олександрівна
МПК: G01R 25/00
Мітки: спосіб, зсуву, вимірювання, фазового
Формула / Реферат:
Спосіб вимірювання фазового зсуву, що включає дискретизацію вимірюваного сигналу, перетворення його в цифрову форму з подальшою цифровою обробкою з метою знаходження синусної і косинусної опорних складових вимірюваного сигналу, за якими обчислюється фазовий зсув, який відрізняється тим, що до косинусної і синусної опорних складових вимірюваного сигналу додається певний фазовий зсув, який залежить від кількості вибірок на період сигналу, так...
Спосіб вимірювання фазового зсуву
Номер патенту: 78146
Опубліковано: 15.02.2007
Автори: Кіріанакі Микола Володимирович, Юриш Сергій Юрійович
МПК: G01R 25/00
Мітки: спосіб, вимірювання, зсуву, фазового
Формула / Реферат:
Спосіб вимірювання фазового зсуву, який полягає в тому, що формують зразковий фіксований інтервал часу, який вибирають більшим за період самої низької частоти послідовностей, фазовий зсув між якими вимірюється, протягом цього часу вимірювання квантують часові інтервали, які пропорційні фазовому зсуву між двома імпульсними послідовностями, та лічать загальну кількість імпульсів, який відрізняється тим, що тривалість фіксованого інтервалу часу...
Пристрій вимірювання фазового зсуву між двома сигналами за методом багатократної коінциденції
Номер патенту: 110822
Опубліковано: 25.10.2016
Автори: Горященко Сергій Леонідович, Гула Ігор Володимирович, Троцишин Іван Васильович, Горященко Костянтин Леонідович
МПК: G01R 25/00, H03D 3/02
Мітки: сигналами, методом, вимірювання, пристрій, коінциденції, фазового, багатократної, двома, зсуву
Формула / Реферат:
Пристрій вимірювання різниці фаз між двома сигналами, що складається з формувачів імпульсів, схем співпадінь, лічильників імпульсів, мікропроцесорного обчислювального блока, генератору опорних сигналів, який відрізняється тим, що в пристрій введено лічильники імпульсів співпадінь, а також детектор імпульсів, таким чином, що на вхід лічильника подаються сигнали від схеми співпадінь, на вхід лічильника подаються сигнали від схеми співпадінь,...
Спосіб та пристрій для вимірювання фазового зсуву радіоімпульсних ехо-сигналів
Номер патенту: 98177
Опубліковано: 25.04.2012
Автори: Лігоміна Сергій Миколайович, Баженов Віктор Григорович, Мисливець Людмила Юріївна
МПК: G01R 25/00
Мітки: фазового, ехо-сигналів, спосіб, вимірювання, радіоімпульсних, пристрій, зсуву
Формула / Реферат:
1. Спосіб вимірювання фазового зсуву радіоімпульсних ехо-сигналів, що включає дискретизацію випромінюваного та відбитого сигналів, їх перетворення в цифровий код і ортогональне обчислення фазового зсуву, який відрізняється тим, що коди збережених значень синуса та косинуса опорного сигналу зчитують з частотою дискретизації, частоту, тривалість та період посилок випромінюваного радіосигналу задають також частотою дискретизації синхросигналів,...
Попередній патент: Масляний бісквітний напівфабрикат “феєрія”
Наступний патент: Бінарна композиція штамів bradyrhizobium japonicum з різною швидкістю росту для підвищення продуктивності сої
Випадковий патент: Спосіб облітерації посттрепанаційних порожнин при всіх видах хірургічних втручань на середньому вусі