Компенсаційний акселерометр
Номер патенту: 21726
Опубліковано: 15.03.2007
Автори: Черняк Микола Григорович, Скрипковський Геннадій Олексійович
Формула / Реферат
1. Компенсаційний акселерометр, що містить рознімний корпус з однією базовою настановною поверхнею, з розташованими в ньому рухомою пластиною чутливого елемента, встановленою на пружному підвісі, верхньою і нижньою магнітними системами, кожна з яких складається з магнітопроводу, постійного магніту і полюсного наконечника, причому магнітні системи в поєднанні з двома рухомими котушками, з'єднаними послідовно, розташованими на рухомій пластині чутливого елемента і розміщеними усередині зазорів магнітних систем між поверхнями відповідних магнітопроводів і полюсних наконечників, утворюють датчик моменту, дві нерухомі тороїдальні котушки збудження, включені диференціально і розміщені на постійних магнітах магнітних систем, самі магнітні системи і рухомі котушки датчика моменту утворюють датчик кута, а з'єднані послідовно попередній підсилювач, демодулятор, ланка корекції, підсилювач потужності формують сервопідсилювач, що створює разом з високочастотним генератором, котушками датчика моменту і датчика кута контур негативного зворотного зв'язку акселерометра, та вихідний фільтр, причому рознімний корпус оснащений захисним кожухом, який відрізняється тим, що в акселерометрі рознімний корпус складається з верхнього і нижнього корпусів, що жорстко з'єднані між собою і мають співвісно розташовані крізні отвори з можливістю розміщення в них магнітопроводів, чутливий елемент виконаний металевим, рухома пластина якого одним своїм кінцем з'єднана з його основою за допомогою пружного підвісу, при цьому чутливий елемент розташований між верхнім і нижнім корпусами і жорстко закріплений основою на торці нижнього корпусу.
2. Компенсаційний акселерометр за п.1, який відрізняється тим, що нерухомі тороїдальні котушки збудження датчика кута зв'язані з високочастотним генератором для їх живлення змінною високочастотною напругою, вихід підсилювача потужності через котушку індуктивності зв'язаний з входом попереднього підсилювача та з котушками датчика моменту, інший кінець яких зв'язаний з паралельно з'єднаними резистором та конденсатором, які з'єднані з вихідним фільтром.
3. Компенсаційний акселерометр за п.1, який відрізняється тим, що крізні отвори верхнього і нижнього корпусів і зовнішні поверхні магнітопроводів виконані принаймні нарізними з можливістю механічної настройки нульового сигналу датчика кута шляхом переміщення магнітних систем відносно верхнього і нижнього корпусів.
4. Компенсаційний акселерометр за п.3, який відрізняється тим, що у верхньому і нижньому корпусах виконані бічні нарізні отвори для фіксації магнітопроводів в корпусах за допомогою стопорних гвинтів.
5. Компенсаційний акселерометр за п.1, який відрізняється тим, що для установки його на об'єкті він оснащений додатковою базовою настановною поверхнею, виконаною, як і перша базова настановна поверхня, на нижньому корпусі і перпендикулярно до неї.
Текст
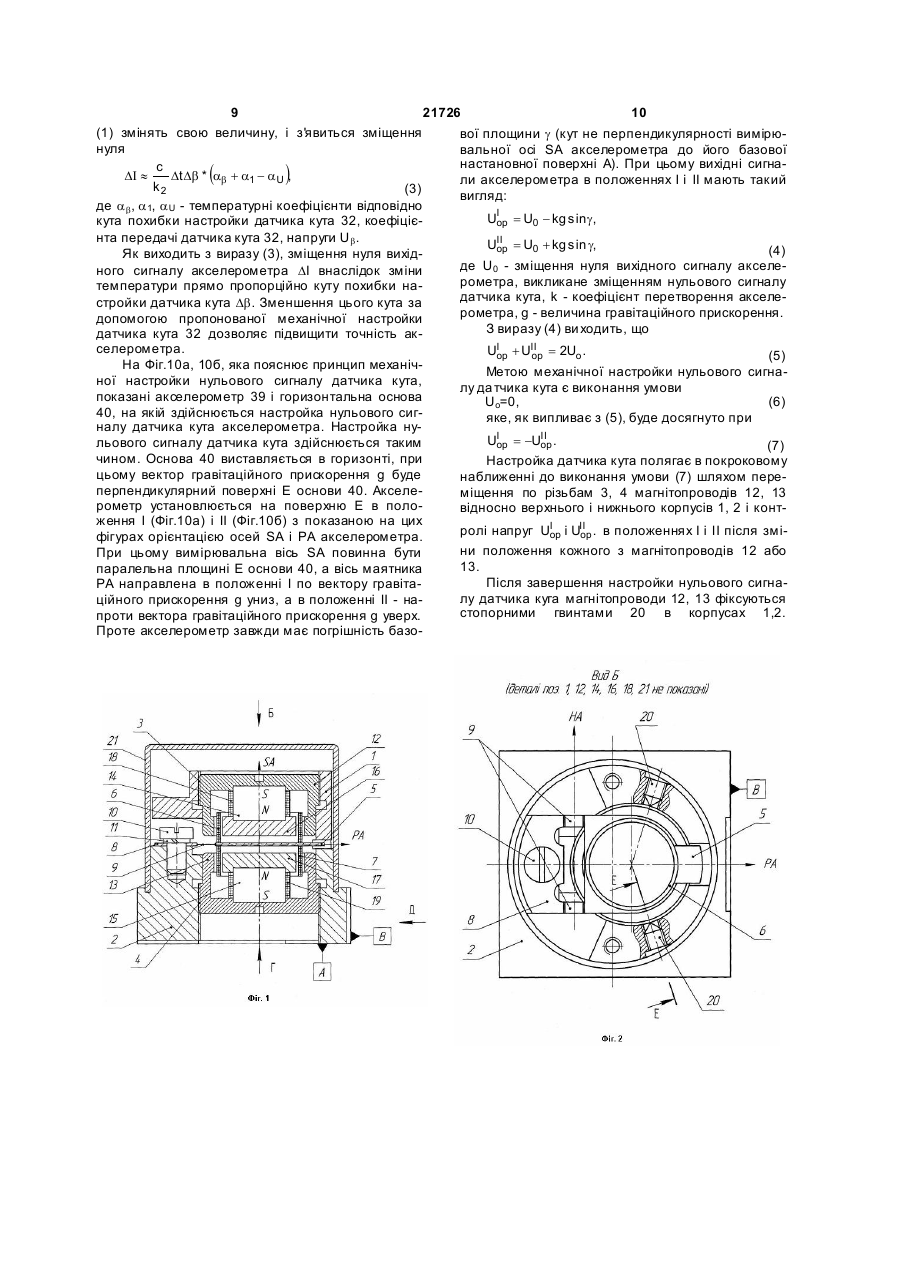
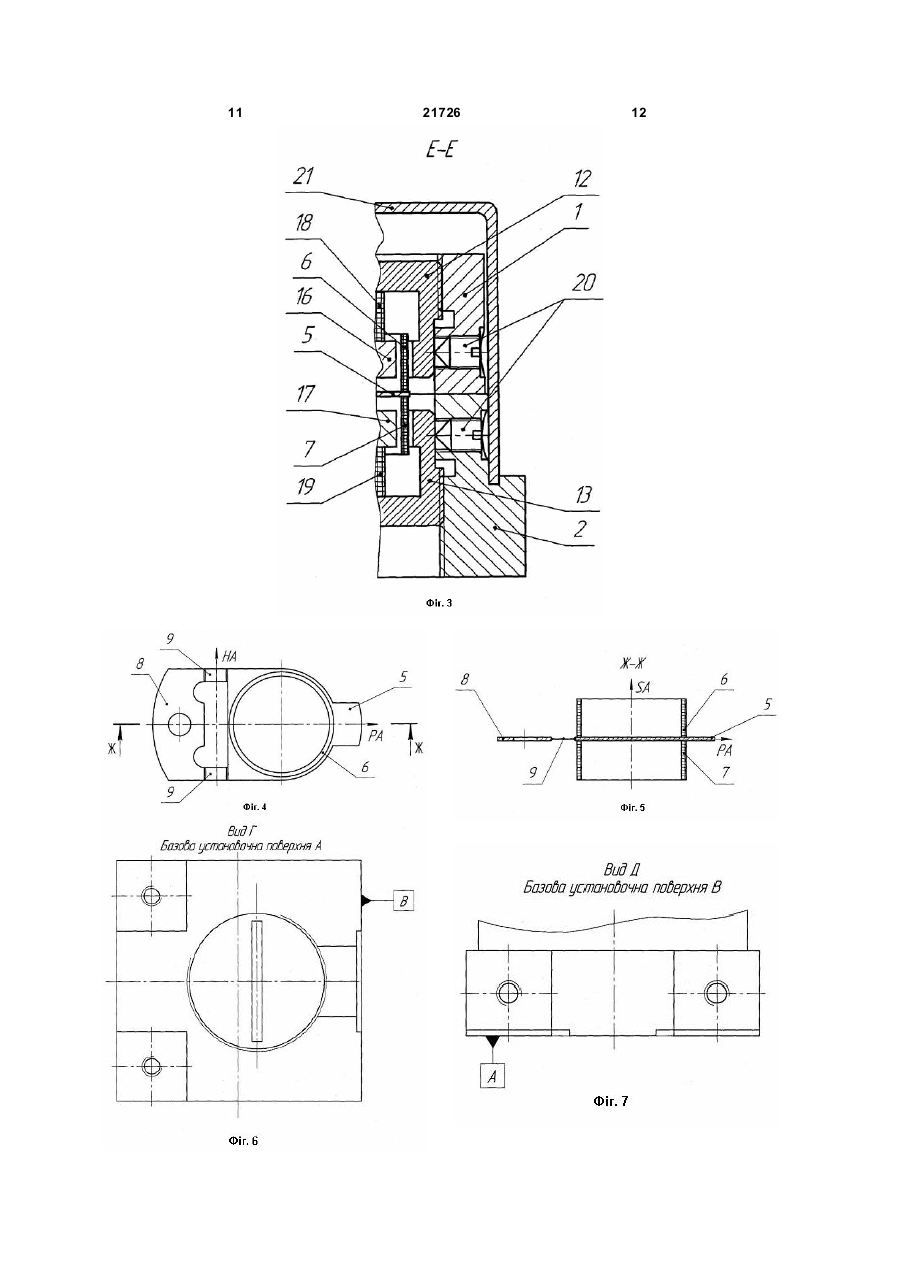
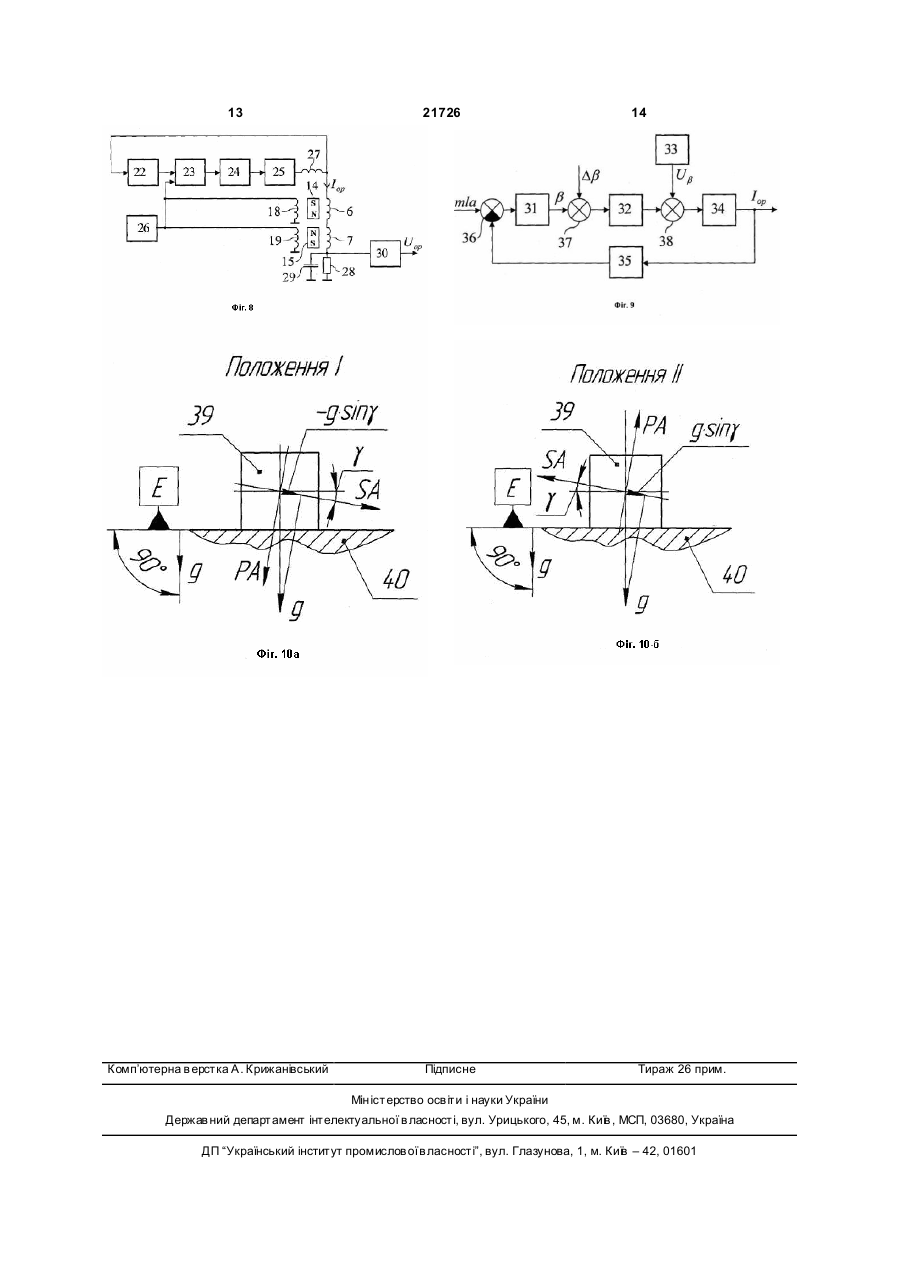
1. Компенсаційний акселерометр, що містить рознімний корпус з однією базовою настановною поверхнею, з розташованими в ньому рухомою пластиною чутливого елемента, встановленою на пружному підвісі, верхньою і нижньою магнітними системами, кожна з яких складається з магнітопроводу, постійного магніту і полюсного наконечника, причому магнітні системи в поєднанні з двома рухомими котушками, з'єднаними послідовно, розташованими на рухомій пластині чутливого елемента і розміщеними усередині зазорів магнітних систем між поверхнями відповідних магнітопроводів і полюсних наконечників, утворюють датчик моменту, дві нерухомі тороїдальні котушки збудження, включені диференціально і розміщені на постійних магнітах магнітних систем, самі магнітні системи і рухомі котушки датчика моменту утворюють датчик кута, а з'єднані послідовно попередній підсилювач, демодулятор, ланка корекції, підсилювач потужності формують сервопідсилювач, що створює разом з високочастотним генератором, котушками датчика моменту і датчика кута контур негативного зворотного зв'язку акселерометра, та вихідний фільтр, причому рознімний корпус оснащений захисним кожухом, який відрізняється тим, що в акселерометрі рознімний корпус складається з верхнього і нижнього корпусів, що жорстко з'єднані між собою і мають співвіс U 2 UA 1 3 21726 4 містять рознімний корпус, маятникову інерційну ний магнітний потік, який проходить через тороїмасу (далі по тексту - IМ.), з'єднану за допомогою дальні котушки датчика кута, розташовані на пружного підвісу з кільцевою настановною рамкою, центральних осердь магнітних кіл датчика моменвстановленою в корпусі, датчик кута, датчик моту. Ці магнітні потоки, що проходять через тороїменту з рухомими котушками і електричну частину. дальні котушки датчика кута, змінюються по велиДо недоліків конструкції акселерометра, опичині, коли змінюється положення ІМ відносно саної в[патенті США №4498342], відносяться: корпусу акселерометра внаслідок того, що змі1) виконання датчика кута із застосуванням щення ІМ змінює потокозчеплення магнітного помостової схеми з'єднання тензорезісторів привотоку між рухомими котушками і магнітопроводом. У дить до дуже великого температурного дрейфу котушках датчика кута індукуються змінні напруги, нульового сигналу акселерометра. Оскільки маятамплітуда яких залежить від взаємного положення никова інерційна маса пристрою має елементи рухомих котушок датчика моменту і котушок датпружного підвісу, то зазначений нульовий дрейф чика кута, тобто від положення ІМ акселерометра сигналу викликає значну похибку акселерометра відносно його корпусу. Ди ференціально зв'язані компенсаційного типу, величина якої пропорційна котушки датчика кута створюють високочастотний жорсткості підвісу; змінний вихідний сигнал. Його амплітуда пропор2) відсутня система настройки нульового сигційна куту відхилення ІМ, тоді як фаза залежить налу датчика кутового переміщення ІМ; від напряму відхилення ІМ. 3)виконання чутливого елементу з кремнію поТаким чином, в акселерометрі рухомі котушки гіршує стійкість акселерометра до дії ударних і датчика моменту діють як первинні обмотки датчивібраційних навантажень, особливо - у вимкненока кута, обидві вихідні котушки датчика кута і кому стані. тушки датчика моменту використовують спільне Найбільш близьким по технічній сутності до магнітне коло. Це спрощує конструкцію механічної корисної моделі, що заявляється, є акселерометр, частини акселерометра. описаний у вищеназваному [патенті США До недоліків акселерометра, найближчого по №6073490]. технічному рішенню до корисної моделі, що заявАкселерометр компенсаційного типа включає ляється, і вибраного як найближчий аналог, віднорознімний корпус і ІМ, з'єднану за допомогою прусяться: жного підвісу з настановною рамкою, встановле1) ІМ, її пружний підвіс і настановна рамка для ною в корпусі. Обидві половини рознімного корпукріплення до корпусу виконані з монокристала су виконані у вигляді прямокутних бр усків з кремнію, тоді як магнітні кілі акселерометра викоциліндричним отвором і чашоподібним магнітним нані металевими, коефіцієнти теплового розшиколом, що має зазор між полюсними наконечникарення яких відрізняються від коефіцієнтів темпеми. Чашоподібне магнітне коло має центральне ратурного розширення кремнію. Це приводить до осердя, що складається з постійного магніту і потемпературного дрейфу нульового сигналу акселюсного наконечника. Обидва бруски рознімного лерометра, для зниженняякого доводиться підбикорпусу виготовлені з кремнієвого монокристала, рати в певній комбінації матеріали, з яких виготовщо має ту ж саму орієнтацію осей кремнієвого молені елементи конструкції акселерометра, що нокристала, що і пластина ІМ. мають різні коефіцієнти теплового розширення; На постійних магнітах центральних осердь 2) наявність в акселерометрі елементів, вигочашоподібних магнітних кіл встановлені тороїдатовлених з кремнію, знижує, як відмічалося вище, льні котушки датчика кута, включені диференціайого стійкість до вібраційних і ударних навантально. Ліві і праві половини рознімного корпусу акжень, особливо у вимкненому стані. Це вимагає селерометра з'єднуються між собою за допомогою при установці акселерометра на об'єкті застосупружних елементів (пружин). вання додаткових засобів для зниження впливу Цей акселерометр працює як звичайний привказаних вище дій; лад компенсаційного типу. Коли основа приладу 3) конструкція приладу має засоби для електрухається з прискоренням, спрямованим по осі ричної настройки вихідного нульового сигналу дачутливості SA пристрою, ІМ відхиляється під дією тчика кута. Проте це веде до ускладнення електмоменту сили інерції прискорення, яке вимірюєтьричної частини приладу, оскільки настройка ся. Датчик кута перетворює кут відхилення ІМ в здійснюється шляхом замикання секцій додаткоелектричний сигнал. З'єднані послідовно поперевих тороїдальних котушок, розташованих на дній підсилювач, демодулятор, ланка корекції і центральних осердь (магнітах) магнітних кіл; підсилювач потужності утворюють сервопідсилю4) у конструкції приладу [див. фіг.4 патенту вач акселерометра і виробляють струм, що протіСША №6073490] можлива механічна настройка кає через котушки датчика моменту, необхідний вихідного нульового сигналу датчика кута. Надля зрівноважування моменту сили інерції. Вихід стройка здійснюється шляхом зміни положення підсилювача потужності послідовно з'єднаний з феромагнітного осердя відносно котушок датчика фільтром, напруга на виході якого є вихідним сигкута. Проте при цьому постійні магніти в магнітноналом акселерометра. му колі виконані зовнішніми, а металевий магнітоВідмітними рисами даного акселерометра є провід, в якому переміщується осердя, - внутрійого конструкція і принцип роботи датчика кута. У шнім. Це приводить до впливу на магніти рухомі котушки датчика моменту поряд із струмом зовнішніх магнітних полів, що спотворюють магнітзворотного зв'язку подається змінний струм від ні потоки в магнітних системах, що знижує точність високочастотного генератора, зв'язаного з входом вимірювання прискорення; підсилювача потужності. Цей струм створює змін 5 21726 6 5) у конструкції приладу є одна базова настаіндуктивності зв'язаний з входом попереднього новна поверхня, перпендикулярна його осі чутлипідсилювача та з котушками датчика моменту, вості SA. При вимірюванні двох або трьох проекцій інший кінець яких зв'язаний з паралельно з'єднавектора прискорення об'єкта встановленими на ними резистором та конденсатором, які з'єднані з ньому акселерометрами наявність однієї базової вихідним фільтром, а крізні отвори верхнього і настановної поверхні ускладнює процес установки нижнього корпусів і зовнішні поверхні магнітопроакселерометра і вимагає застосування додаткових водів виконані, по крайній мірі, нарізними з можлипристроїв для його установки; вістю механічної настройки нульового сигналу да6) використання в конструкції акселерометра тчика кута шляхом переміщення магнітних систем рухомих котушок датчика моменту в якості котувідносно верхнього і нижнього корпусів, а у верхшок збудження датчика кута зменшує величину ньому і нижньому корпусах виконані бічні нарізні напруги на виході підсилювача потужності, що йде отвори для фіксації магнітопроводів в корпусах за на зрівноважування моменту сили інерції, на ведопомогою стопорних гвинтів, причому для усталичину амплітуди високочастотної напруги збуновки на об'єкті акселерометра він споряджений дження датчика кута. додатковою базовою настановною поверхнею, В основу корисної моделі покладена задача виконаною, як і перша базова настановна поверхудосконалення компенсаційного акселерометра ня, на нижньому корпусі і перпендикулярно до неї. шляхом спрощення його конструкції, підвищення Запропонований компенсаційний акселероточності вимірювання прискорення при використометр дозволяє поліпшити його експлуатаційні та вуванні іншої (порівняно з найближчим аналогом) міцнісні характеристики і підвищити ефективність схеми механічної настройки вихідного нульового його роботи при установці на об'єкті - наприклад, сигналу датчика кута, використання іншої електрина транспортному засобі. чної схеми, спрощення процесу установки приладу Конструкція акселерометра, що заявляється, і на об'єкті при введенні додаткової базової настапринцип механічної настройки нульового сигналу новної поверхні акселерометра, підвищення його датчика кута пояснюються такими рисунками: стійкості до вібраційних і ударних навантажень. поперечний перетин акселерометра, проведеПоставлена задача вирішується так, що в комний уздовж осі чутливості SA і осі маятника РА, пенсаційному акселерометрі, який містить рознімтобто його основний вид, показаний на Фіг.1; ний корпус з однією базовою настановною повервид Б на Фіг.1 (без елементів поз.1, 12, 14, 16, хнею, з розташованими в ньому рухомою 18, 21) показаний на Фіг.2; пластиною чутливого елементу, встановленої на розріз Е-Е на Фіг.2 акселерометра поданий на пружному підвісі, верхньою і нижньою магнітними Фіг.3; системами, кожна з яких складається з магнітона Фіг.4 показана конструкція чутливо го елепроводу, постійного магніту і полюсного наконечменту; ника, причому магнітні системи в поєднанні з дворозріз Ж-Ж на Фіг.4 поданий на Фіг.5; ма рухомими котушками, з'єднаними послідовно, на Фіг.6 приведений вид Г на Фіг.1 акселеророзташованими на рухомій пластині чутливого метра, що показує базову настановну поверхню А елементу і розміщеними усередині зазорів магнітакселерометра; них систем між поверхнями відповідних магнітона Фіг.7 приведений вид Д на Фіг.1 акселеропроводів і полюсних наконечників, утворюють датметра, що показує базову настановну поверхню В чик моменту, дві нерухомі тороїдальні котушки акселерометра; збудження, включені диференціально і розміщені на Фіг.8 приведена функціональна електрична на постійних магнітах магнітних систем, самі магнісхема акселерометра; тні системи і рухомі котушки датчика моменту на Фіг.9 приведена структурна схема акселеутворюють датчик кута, а з'єднані послідовно порометра, що ілюструє механічну настройку нульопередній підсилювач, демодулятор, ланка корекції, вого сигналу датчика кута; підсилювач потужності формують сервопідсилюна Фіг.10а і 10б показана кінематична схема, вач, що створює разом з високочастотним генеращо пояснює принцип механічної настройки нульотором, котушками датчика моменту і датчика кута вого сигналу датчика кута. контур негативного зворотного зв'язку акселероАкселерометр (Фіг.1-5) складається з верхньометра, та вихідний фільтр, причому рознімний кого 1 і нижнього 2 корпусів, жорстко з'єднаних між рпус споряджений захисним кожухом, новим є те, собою, що мають співвісно розташовані нарізні що в акселерометрі рознімний корпус складається отвори 3, 4, представляючи таким чином рознімз верхнього і нижнього корпусів, що жорстко з'єдний корпус, усередині якого між цими корпусами нані між собою і мають співвісно розташовані крізрозміщений чутливий елемент, що складається із ні отвори з можливістю розміщення в них магнітоІМ, утвореної рухомою пластиною 5 і двома встапроводів, чутливий елемент виконаний новленими на ній котушками датчика моменту 6 і металевим, рухома пластина якого одним своїм 7, нерухомої основи 8 і пружного підвісу 9 пластикінцем з'єднана з основою за допомогою пружного ни 5 до основи 8. Основа 8 жорстко закріплена на підвісу, при цьому чутливий елемент розташованижньому корпусі, наприклад, за допомогою гвинний між верхнім і нижнім корпусами і жорстко зата 10 і пружинної шайби 11. кріплений основою на торці нижнього корпусу, крім Усередині рознімного корпусу розміщені дитого, нерухомі тороїдальні котушки збудження даференціальний датчик кута і датчик моменту, притчика кута зв'язані з високочастотним генератором чому в цих датчиках використовуються одні і ті ж для їх живлення змінною високочастотною напрумагнітні системи. Магнітні системи включають до гою, вихід підсилювача потужності через котушку себе магнітопроводи 12 і 13, постійні магніти 14 і 7 21726 8 15, полюсні наконечники 16 і 17, при цьому згадані IМ, а знак відповідає напряму відхилення IМ. Далі магнітопроводи з'єднані відповідно з верхнім 1 і ця напруга проходить через ланку корекції 24 і нижнім 2 корпусами за допомогою нарізних з'єдпідсилювач потужності 25, вихідна напруга якого у нань 3 і 4. На магнітах 14 і 15 розміщені тороїдавигляді сигналу зворотного зв'язку подається чельні котушки збудження 18 і 19 датчика кута. рез котушку індуктивності 27 на рухомі котушки 6 і Рухомі котушки 6 і 7 розміщені усередині зазо7. Протікаючи по котушках 6 і 7 струм зворотного рів магнітних систем між поверхнями відповідних зв'язку Іор взаємодіє з полями постійних магнітів магнітопроводів 12, 13 і полюсних наконечників 16, 14 і 15 датчика моменту і створює момент зворот17, при цьому рухомі котушки 6 і 7 датчика моменного зв'язку (момент сили Ампера) MF, зрівноважуту є також вихідними котушками датчика кута. вальний момент сили інерції Мi вимірюваного приМагнітні системи можуть переміщатися відноскорення і повертаючий IМ в нейтральне сно корпусів 1 і 2 уздовж осі SA по різьбам 3 і 4 і положення. Протікаючи по резистору 28, струм фіксуються до корпусів стопорними гвинтами 20 зворотного зв'язку створює напругу Uop=IopR (R (Фіг.2, 3). опір резистора 28), що є вихідним сигналом аксеНижній корпус 2 має дві взаємнолерометра. перпендикулярні базові настановні поверхні А і В Настройку нульового сигналу датчика кута подля установлення акселерометра на об'єкті (наяснюють Фіг.9, 10а і 10б. На Фіг.9 показані чутлиприклад, за допомогою гвинтів, що угвинчуються в вий елемент 31, датчик кута 32, джерело стабільнарізні отвори в поверхнях А і В), (Фіг.6, 7). ної напруги 33, ланка корекції з підсилювачем Конструкція акселерометра закрита зовнішнім потужності 34, датчик моменту 35, суматори 36, 37 захисним кожухом 21. і 38. Функціональна електрична схема акселеромеДатчик кута 32 вимірює кут, який за допомогою тра показана на Фіг.8. Вона складається з підсисуматора 37 представлений на схемі у вигляді лювача сигналу датчика кута 22, демодулятора 23, суми двох куті в: ланки корекції 24, підсилювача потужності 25, ви- кута b відхилення IМ від нейтрального полосокочастотного генератора 26, постійних магнітів ження, де під нейтральним розуміється положен14 і 15, рухомих котушок датчика моменту 6 і 7, ня, при якому рівнодіюча моментів всіх сил, притороїдальних котушок збудження датчика кута 18 і кладених до IМ, дорівнює нулю; 19, котушки індуктивності 27, резистора 28, кон- кута Db похибки настройки датчика кута, який денсатора 29 і фільтру 30, Uop - вихідна напруга є кутом між нейтральним положенням IМ і полоакселерометра. женням IМ, при якому напруга на виході датчика Акселерометр працює таким чином. кута 32 дорівнює нулю. За відсутності вимірюваного прискорення об'Похибка настройки датчика кута 32 приводить єкту, на якому встановлений акселерометр, спрядо появи зміщення нуля вихідного сигналу акселемованого уздовж осі SA, і виконаній настройці нурометра, яке показано на схемі у вигляді струму льового сигналу датчика кута, ви хідний сигнал зворотного зв'язку Іор, що протікає по котушках акселерометра у вигляді напруги постійного струдатчика моменту 35. Для зменшення цього зміму Uop відсутній. При дії вимірюваного прискоренщення нуля звичайно застосовують електричну ня а уздовж осі SA IM маятникового чутливого схему компенсації похибки настройки датчика куелементу під дією моменту сили інерції Mі=mla (m та. На Фіг.9 - це встановлений на виході датчика маса IМ, l - відстань від осі підвісу НА до центру кута 32 суматор 38 і регульоване джерело стабімас IМ) відхиляється на пружному підвісі 9 відносльної постійної напруги Ub 33. Сигнал з виходу но корпусу акселерометра. При позитивному присуматора 38 поступає на ланку корекції з підсилюскоренні ІМ переміщується до нижнього корпусу 2, вачем потужності 34, до якого підключений датчик а при негативному прискоренні - до верхнього кормоменту 35. Для даної структурної схеми, з урахупусу 1. Відповідно, також з ІМ переміщуються і ванням того, що ланка 34 в акселерометрах місрухомі котушки 6 і 7 відносно нерухомих тороїдатить інтегратор, для статичного стану, при рівній льних котушок 18 і 19. нулю рівнодіючої моментів всіх зовнішніх сил, приНерухомі тороїдальні котушки збудження 18 і кладених до ІМ, справедливе таке вираження для 19 живленні змінною високочастотною напругою зміщення нуля акселерометра DІ: від опорного генератора 26 (Фіг.8). При цьому в c æ 1ö магнітних системах виникають змінні магнітні поDI = ç D b - ÷ Ub k1 ç k2 ÷ токи постійної амплітуди і частоти. При переміè ø (1) щенні котушок 6 і 7 разом з IМ змінюється їх потоде с- кутова жорсткість підвісу IМ, k1 -- коефіцієнт козчеплення із згаданими вище магнітними передачі датчика моменту 35, k2 - коефіцієнт пепотоками. При цьому в котушках 6 і 7 індукуються редачі датчика кута. змінні напруги, причому напрями струмів в котушПід час настройки зміною напруги Ub прагнуть ках 18 і 19 таке, що ці напруги віднімаються. Одевиконати умову ржана у результаті віднімання напруга поступає на 1 * Db* Ub = 0 вхід попереднього підсилювача 22. При цьому амk* (2) 2 плітуда цієї напруги пропорційна величині зміщенде * указує на те, що значення цих величин визнаня ІМ, а фаза цієї напруги залежить від напряму чені на момент завершення настройки. переміщення. На другий вхід демодулятора 23 Проте під час роботи акселерометра внасліподається опорна напруга від генератора 26. На док зміни температури (відносно температури, при виході демодулятора утворюється постійна напруякій проводилася настройка) всі складові виразу га, величина якої пропорційна величині відхилення 9 21726 10 (1) змінять свою величину, і з'я виться зміщення вої площини g (кут не перпендикулярності вимірюнуля вальної осі SA акселерометра до його базової настановної поверхні А). При цьому вихідні сигнаc DI » Dt Db * ab + a1 - a U , ли акселерометра в положеннях І і II мають такий k2 (3) вигляд: де a b , a 1, a U - температурні коефіцієнти відповідно UI = U0 - kg sing, кута похибки настройки датчика кута 32, коефіцієop нта передачі датчика кута 32, напруги U b . UII = U0 + kg sin g, op (4) Як виходить з виразу (3), зміщення нуля вихідде U0 - зміщення нуля вихідного сигналу акселеного сигналу акселерометра DІ внаслідок зміни рометра, викликане зміщенням нульового сигналу температури прямо пропорційно куту похибки надатчика кута, k - коефіцієнт перетворення акселестройки датчика кута Db. Зменшення цього кута за рометра, g - величина гравітаційного прискорення. допомогою пропонованої механічної настройки З виразу (4) ви ходить, що датчика кута 32 дозволяє підвищити точність акселерометра. UI + UII = 2Uo . op op (5) На Фіг.10а, 10б, яка пояснює принцип механічМетою механічної настройки нульового сигнаної настройки нульового сигналу датчика кута, лу да тчика кута є виконання умови показані акселерометр 39 і горизонтальна основа Uo=0, (6) 40, на якій здійснюється настройка нульового сигяке, як випливає з (5), буде досягнуто при налу датчика кута акселерометра. Настройка нуUI = -UII . льового сигналу датчика кута здійснюється таким op op (7) чином. Основа 40 виставляється в горизонті, при Настройка датчика кута полягає в покроковому цьому вектор гравітаційного прискорення g буде наближенні до виконання умови (7) шляхом переперпендикулярний поверхні Е основи 40. Акселеміщення по різьбам 3, 4 магнітопроводів 12, 13 рометр установлюється на поверхню Е в половідносно верхнього і нижнього корпусів 1, 2 і контження І (Фіг.10а) і II (Фіг.10б) з показаною на цих ролі напруг UI i UII . в положеннях І і II після зміop op фігурах орієнтацією осей SA і РА акселерометра. ни положення кожного з магнітопроводів 12 або При цьому вимірювальна вісь SA повинна бути 13. паралельна площині Е основи 40, а вісь маятника Після завершення настройки нульового сигнаРА направлена в положенні І по вектору гравіталу датчика куга магнітопроводи 12, 13 фіксуються ційного прискорення g униз, а в положенні II - настопорними гвинтами 20 в корпусах 1,2. проти вектора гравітаційного прискорення g уверх. Проте акселерометр завжди має погрішність базо ( ) 11 21726 12 13 Комп’ютерна в ерстка А. Крижанівський 21726 Підписне 14 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюCompensation accelerometer
Автори англійськоюCherniak Mykola Hryhorovych
Назва патенту російськоюКомпенсационный акселерометр
Автори російськоюЧерняк Николай Григорьевич
МПК / Мітки
МПК: G01P 15/00
Мітки: компенсаційний, акселерометр
Код посилання
<a href="https://ua.patents.su/7-21726-kompensacijjnijj-akselerometr.html" target="_blank" rel="follow" title="База патентів України">Компенсаційний акселерометр</a>
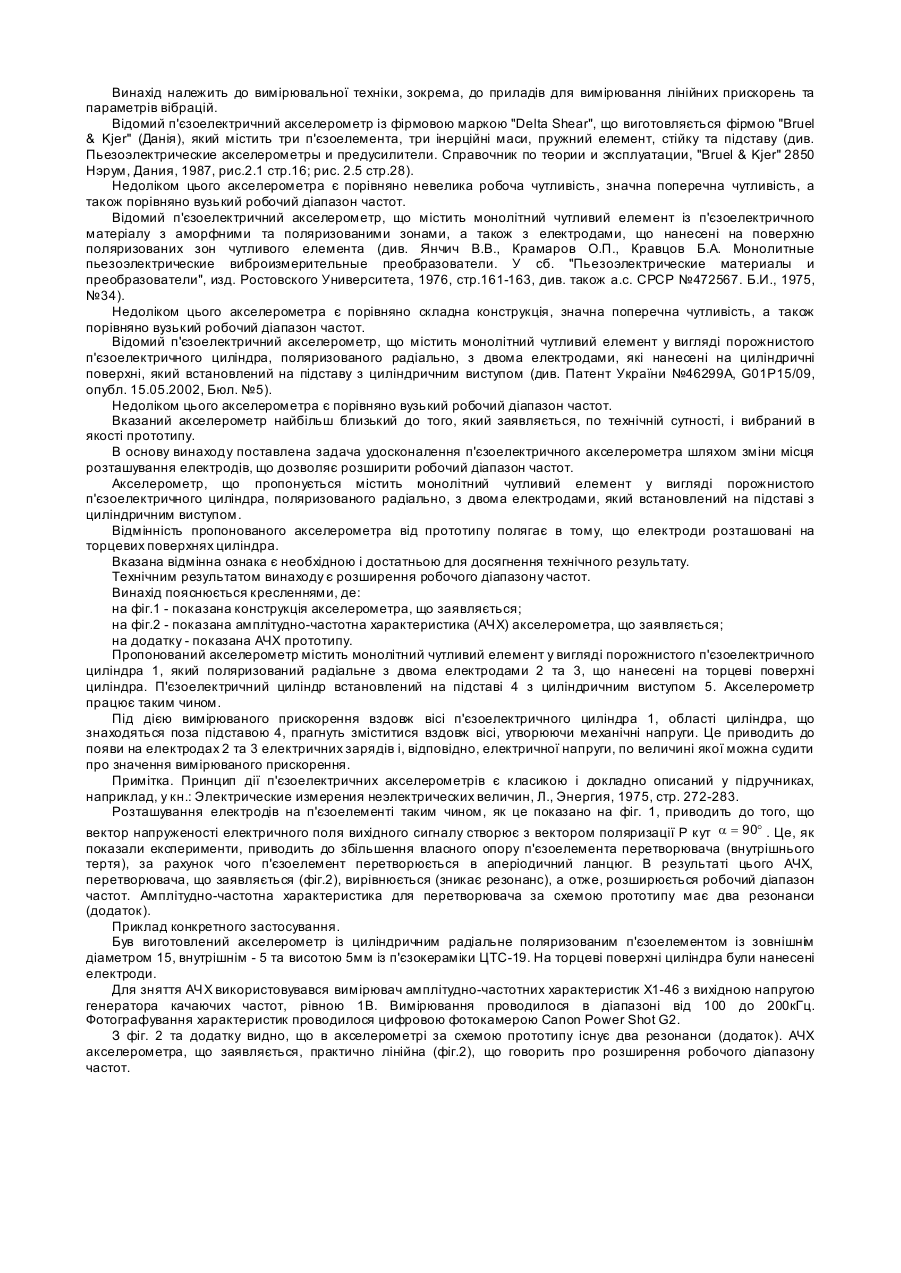
Трьохкомпонентний п’єзоелектричний акселерометр
Номер патенту: 47576
Опубліковано: 15.07.2002
Автори: Сарвар Іван, Шарапов Валерій Михайлович, Мусієнко Максим Павлович
МПК: G01P 15/09, G01L 1/16, H04R 17/00
Мітки: трьохкомпонентний, п'єзоелектричний, акселерометр
Формула / Реферат:
П'єзоелектричний акселерометр, що містить п'єзоелемент, основу та інерційні маси, який відрізняється тим, що основа виконана у вигляді частини кулі, на поверхні якої закріплений п'єзоелемент, який виконаний у вигляді сферичного сегмента з тілесним кутом з двома областями, поляризованими зустрічно, розміщеними аксіально і з'єднаними паралельно, при цьому на поверхні...
П’єзоелектричний акселерометр
Номер патенту: 69870
Опубліковано: 15.09.2004
Автори: Мусієнко Максим Павлович, Шарапов Валерій Михайлович
МПК: G01L 1/16, G01P 15/09, H04R 17/00
Мітки: п'єзоелектричний, акселерометр
Формула / Реферат:
П'єзоелектричний акселерометр, що містить монолітний чутливий елемент у вигляді порожнистого п'єзоелектричного циліндра, поляризованого радіально, з двома електродами, який встановлений на підставці з циліндричним виступом, який відрізняється тим, що електроди розташовані на торцевих поверхнях циліндра.
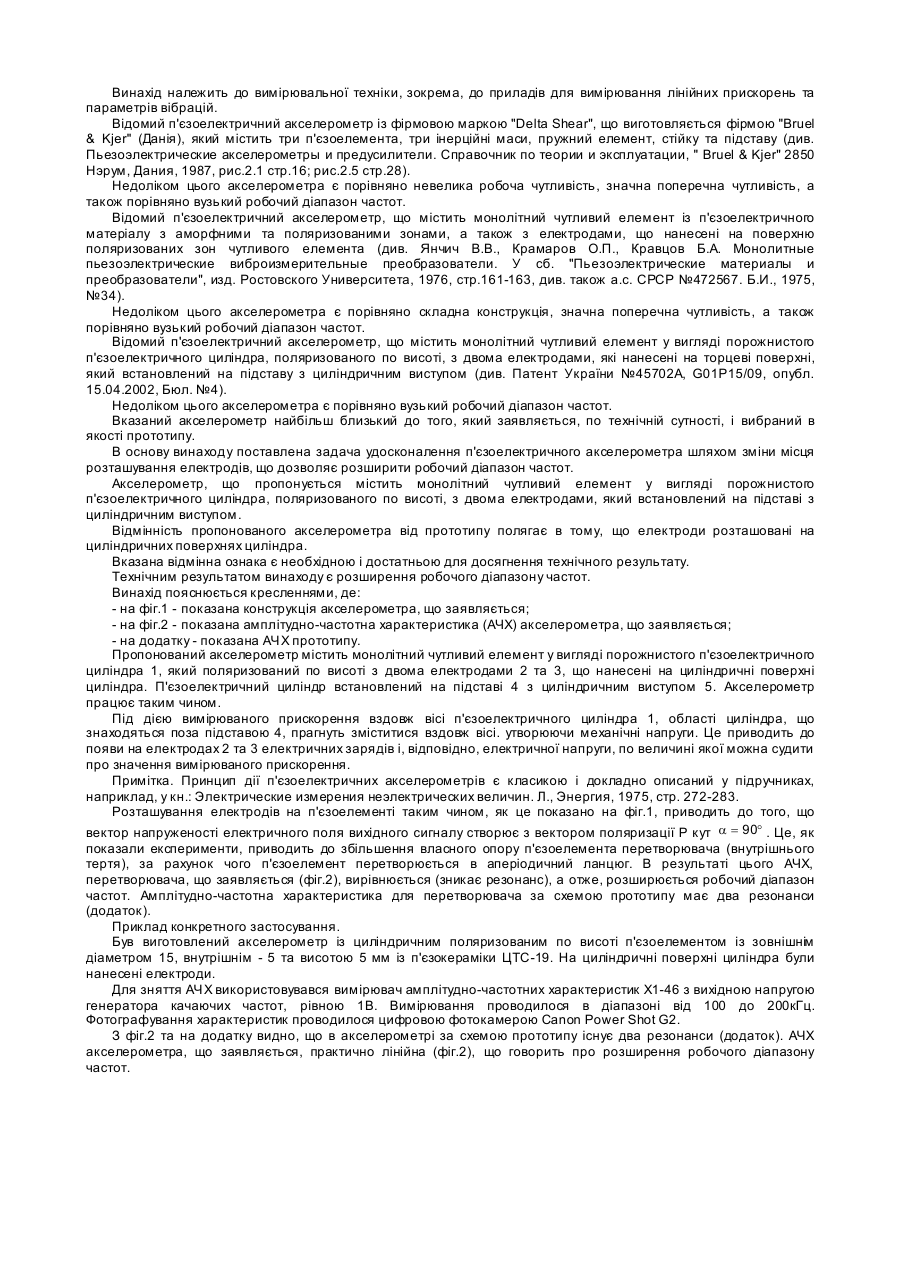
П’єзоелектричний акселерометр
Номер патенту: 69871
Опубліковано: 15.09.2004
Автори: Мусієнко Максим Павлович, Шарапов Валерій Михайлович
МПК: H04R 17/00, G01L 1/16, G01P 15/09
Мітки: п'єзоелектричний, акселерометр
Формула / Реферат:
П'єзоелектричний акселерометр, що містить монолітний чутливий елемент у вигляді порожнистого п'єзоелектричного циліндра, поляризованого по висоті, з двома електродами, який встановлений на підставці з циліндричним виступом, який відрізняється тим, що електроди розташовані на циліндричних поверхнях циліндра.
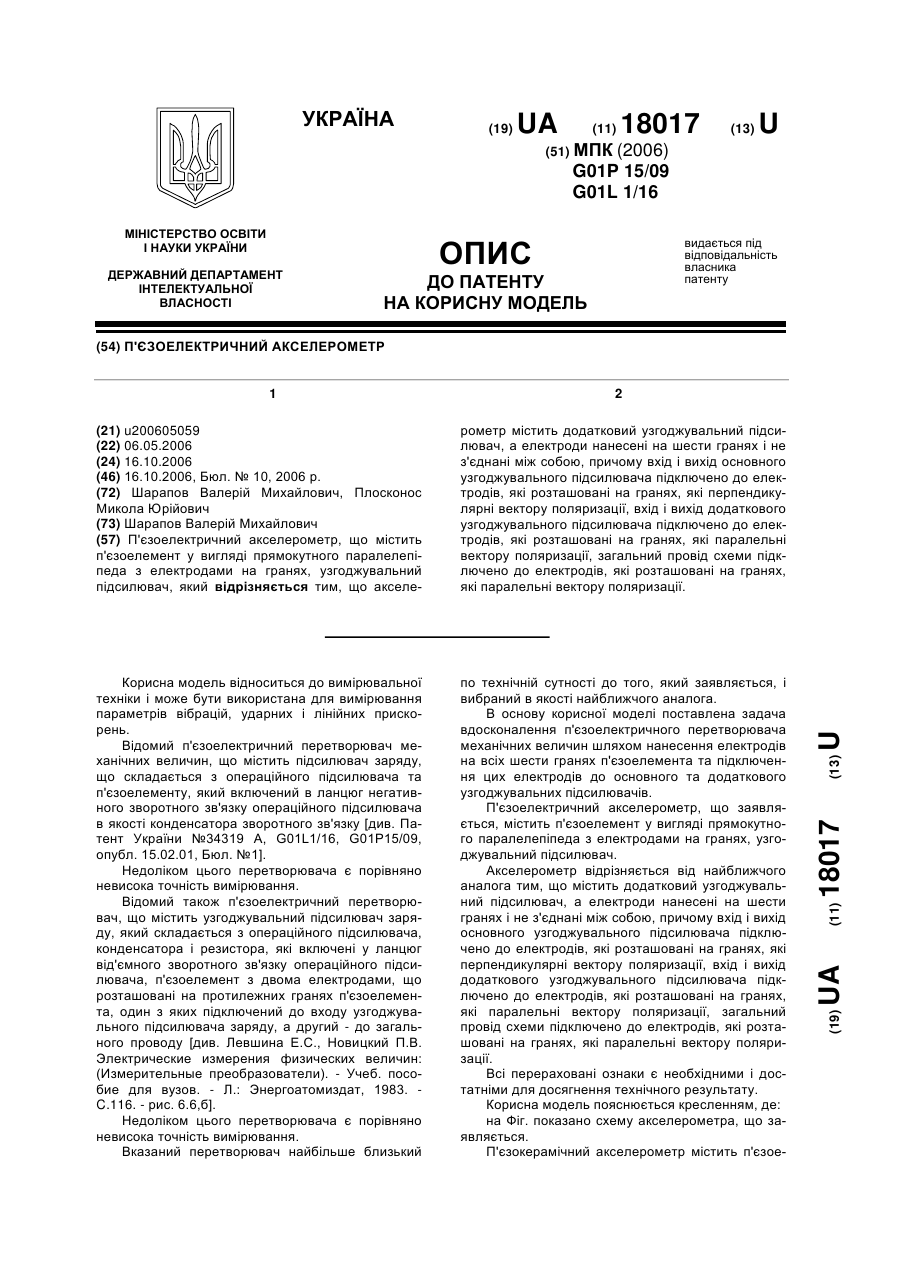
П’єзоелектричний акселерометр
Номер патенту: 18017
Опубліковано: 16.10.2006
Автори: Шарапов Валерій Михайлович, Плосконос Микола Юрійович
МПК: G01P 15/09, G01L 1/16
Мітки: акселерометр, п'єзоелектричний
Формула / Реферат:
П'єзоелектричний акселерометр, що містить п'єзоелемент у вигляді прямокутного паралелепіпеда з електродами на гранях, узгоджувальний підсилювач, який відрізняється тим, що акселерометр містить додатковий узгоджувальний підсилювач, а електроди нанесені на шести гранях і не з'єднані між собою, причому вхід і вихід основного узгоджувального підсилювача підключено до електродів, які розташовані на гранях, які перпендикулярні вектору поляризації,...
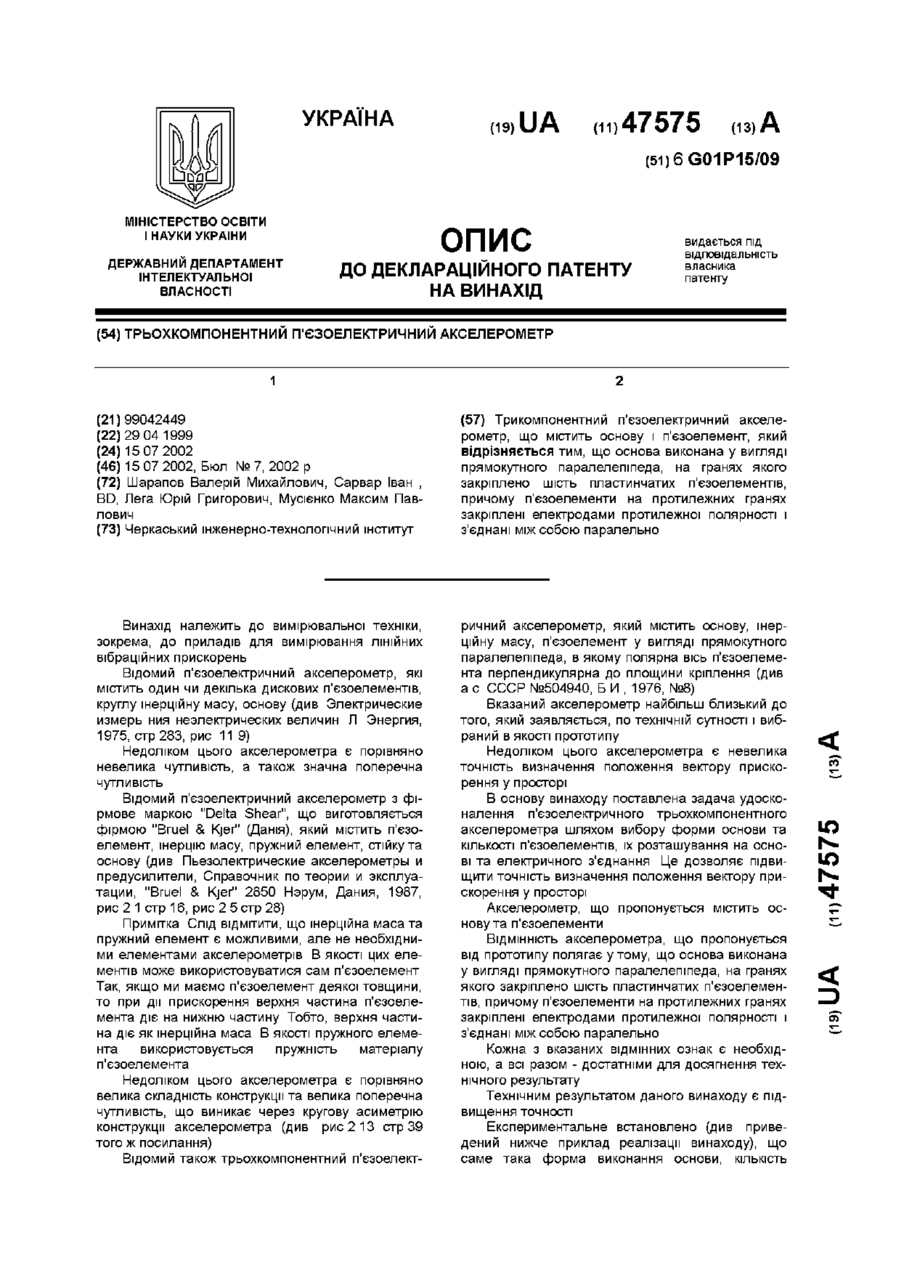
Трьохкомпонентний п’єзоелектричний акселерометр
Номер патенту: 47575
Опубліковано: 15.07.2002
Автори: Лега Юрій Григорович, Мусієнко Максим Павлович, Шарапов Валерій Михайлович, Сарвар Іван
МПК: G01P 15/09
Мітки: трьохкомпонентний, п'єзоелектричний, акселерометр
Формула / Реферат:
Трикомпонентний п'єзоелектричний акселерометр, що містить основу і п'єзоелемент, який відрізняється тим, що основа виконана у вигляді прямокутного паралелепіпеда, на гранях якого закріплено шість пластинчатих п'єзоелементів, причому п'єзоелементи на протилежних гранях закріплені електродами протилежної полярності і з'єднані між собою паралельно.
Попередній патент: Спосіб безперервного термічного одержання металовмісних композиційних матеріалів
Наступний патент: Мазь для лікування опіків та гнійних і інфікованих ран різної етіології
Випадковий патент: Система протиобледеніння літального апарата