Спосіб визначення в’язкості рідких речовин
Номер патенту: 36048
Опубліковано: 10.10.2008
Автори: Воробйов Віталій Іванович, Єршова Емма Олександрівна, Швець Юрій Володимирович, Зайківський Олександр Болеславович
Формула / Реферат
Спосіб визначення в'язкості рідких речовин, що включає занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище і збудження коливань зонда з наступним виміром амплітуди коливань зонда, який відрізняється попереднім проведенням заходів щодо зміни температури досліджуваного середовища до стандартної, збудженням коливання зонда з власною частотою при досягненні досліджуваним середовищем стандартної температури 20 °С, визначенням величини в'язкості досліджуваного середовища через параметри зміни амплітуди його коливань.
Текст
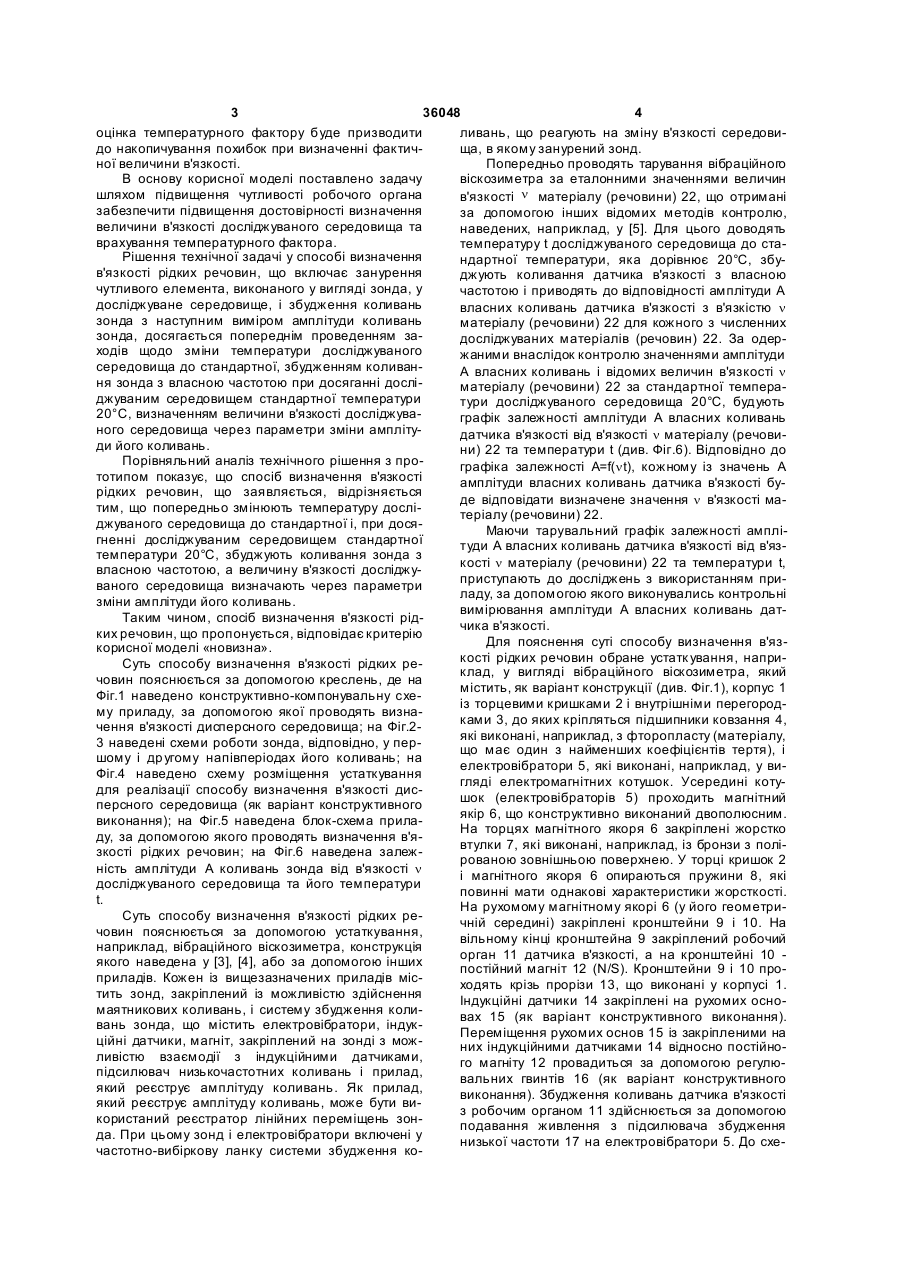
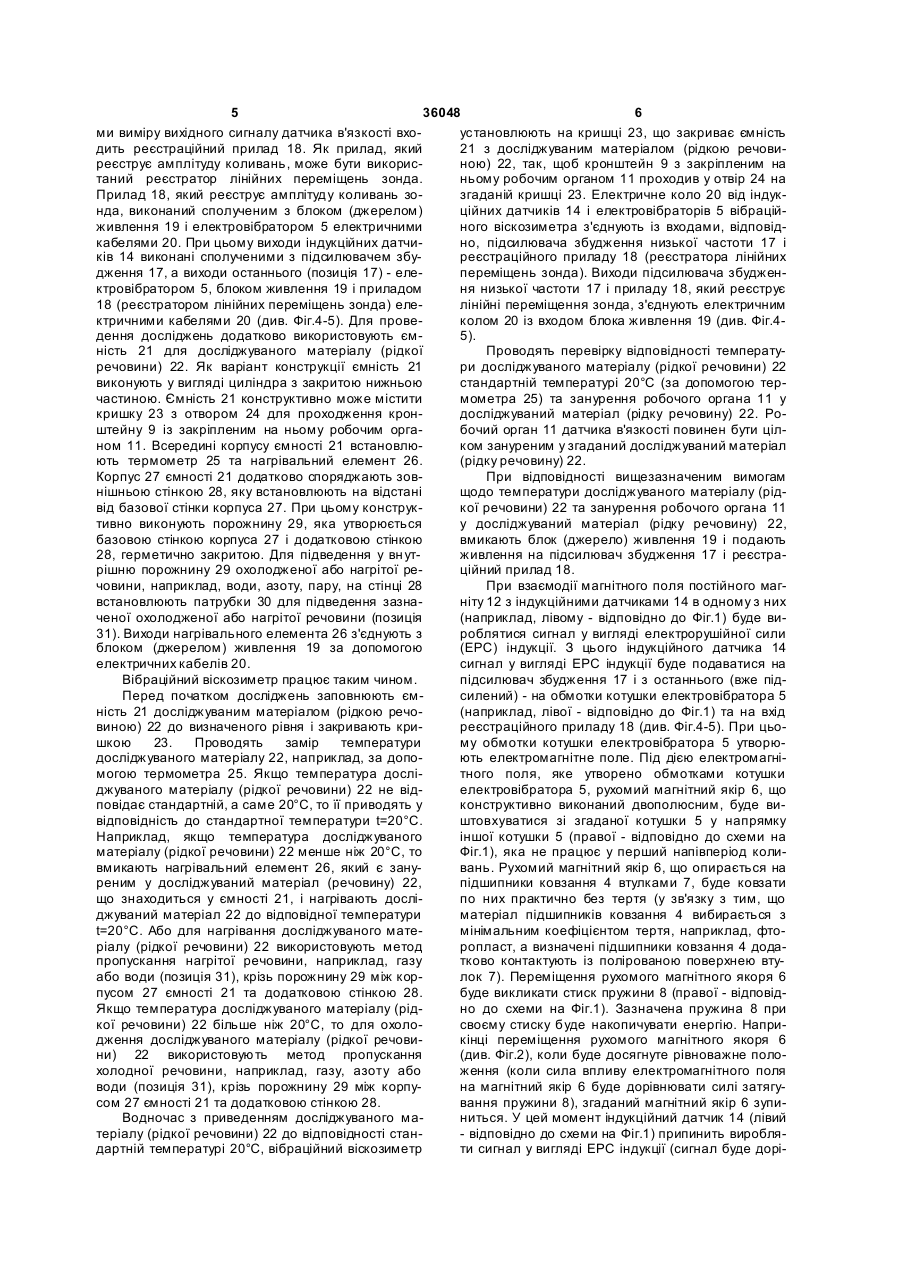
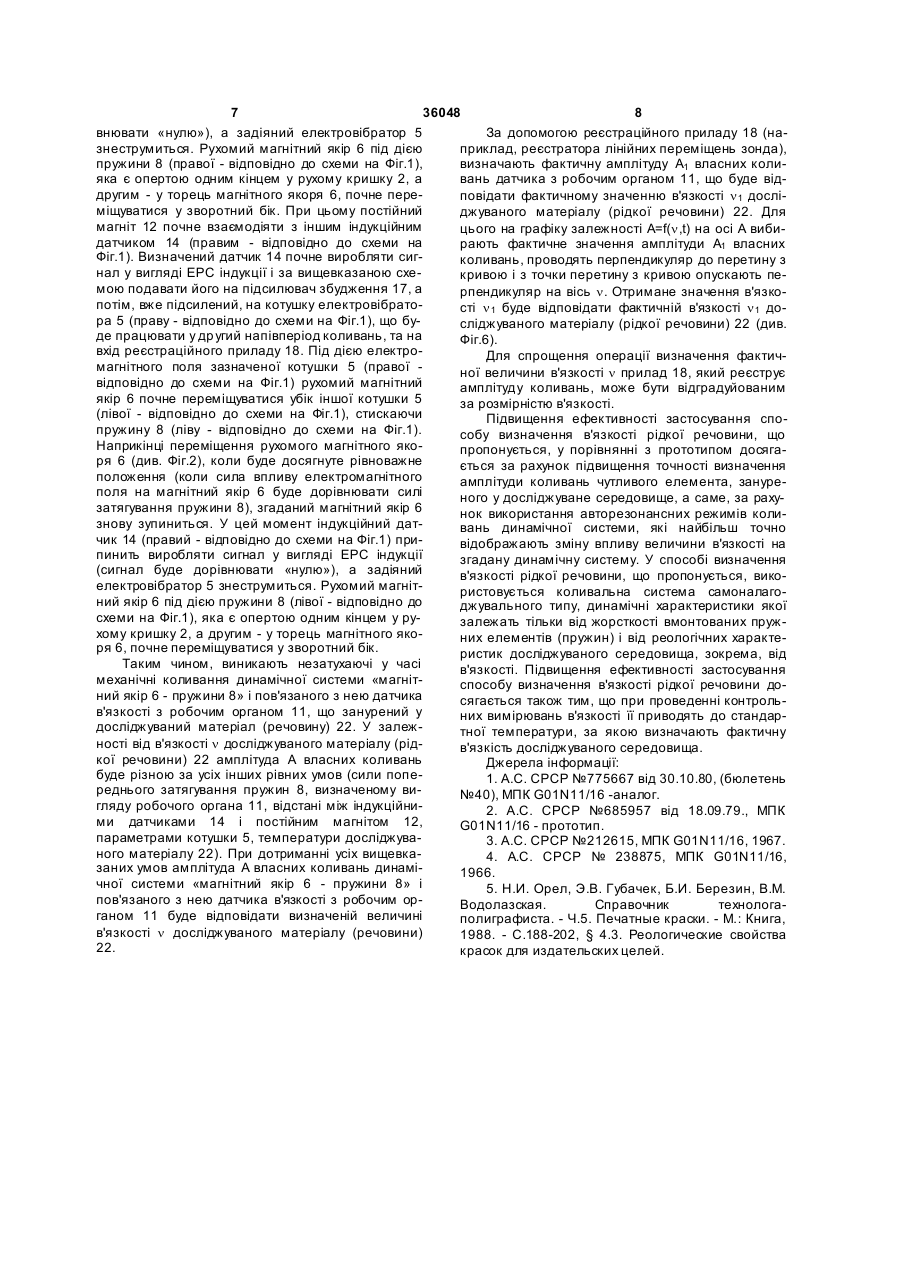
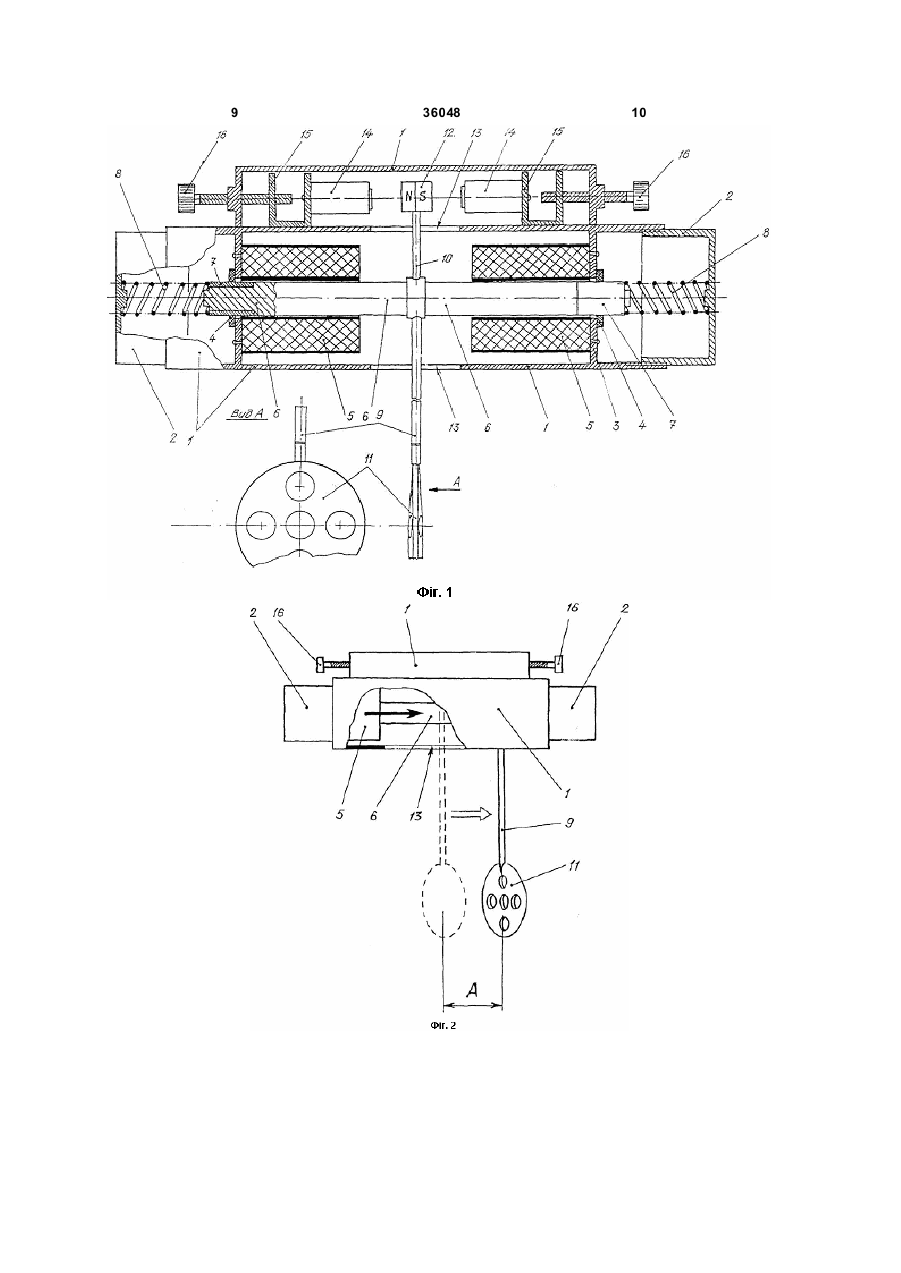
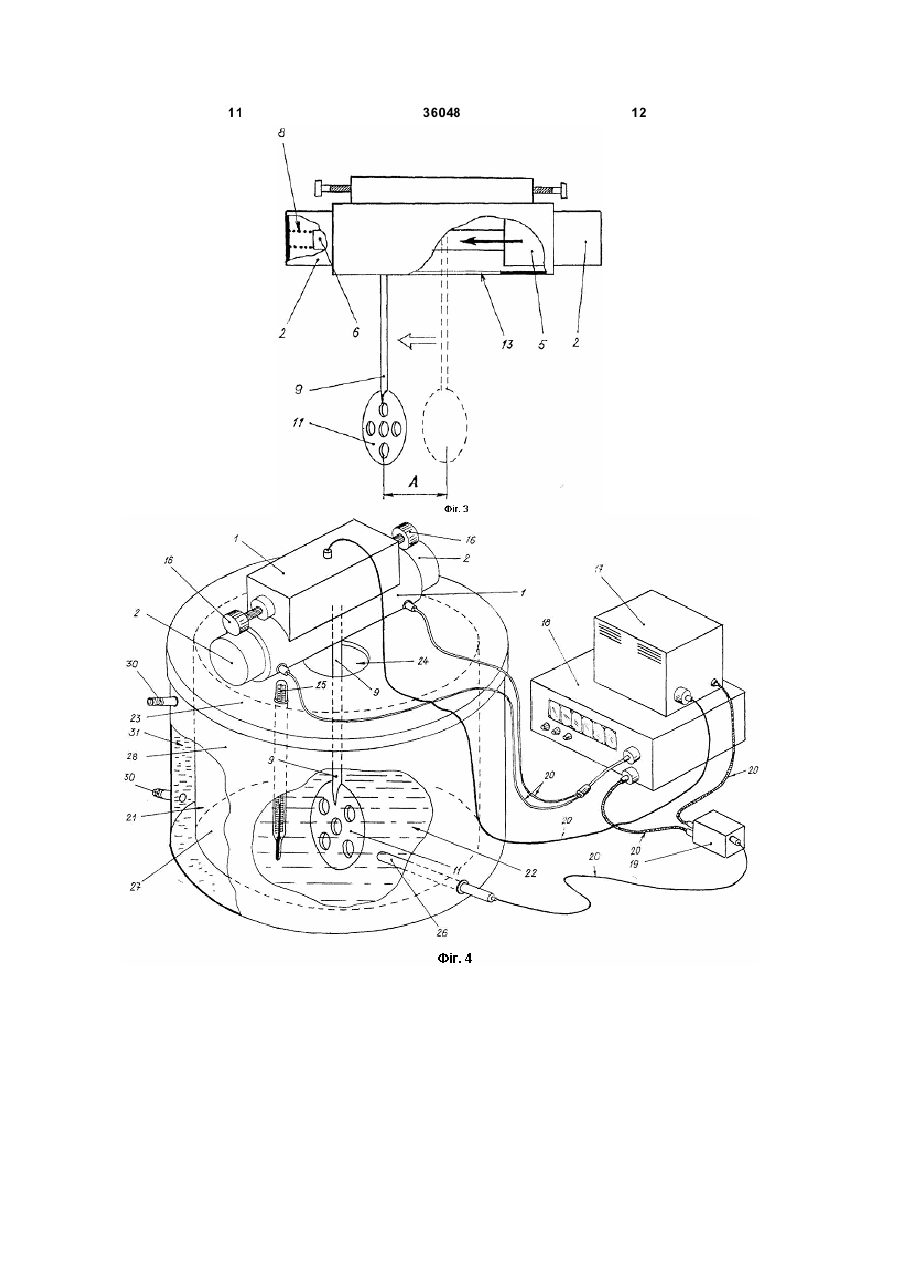
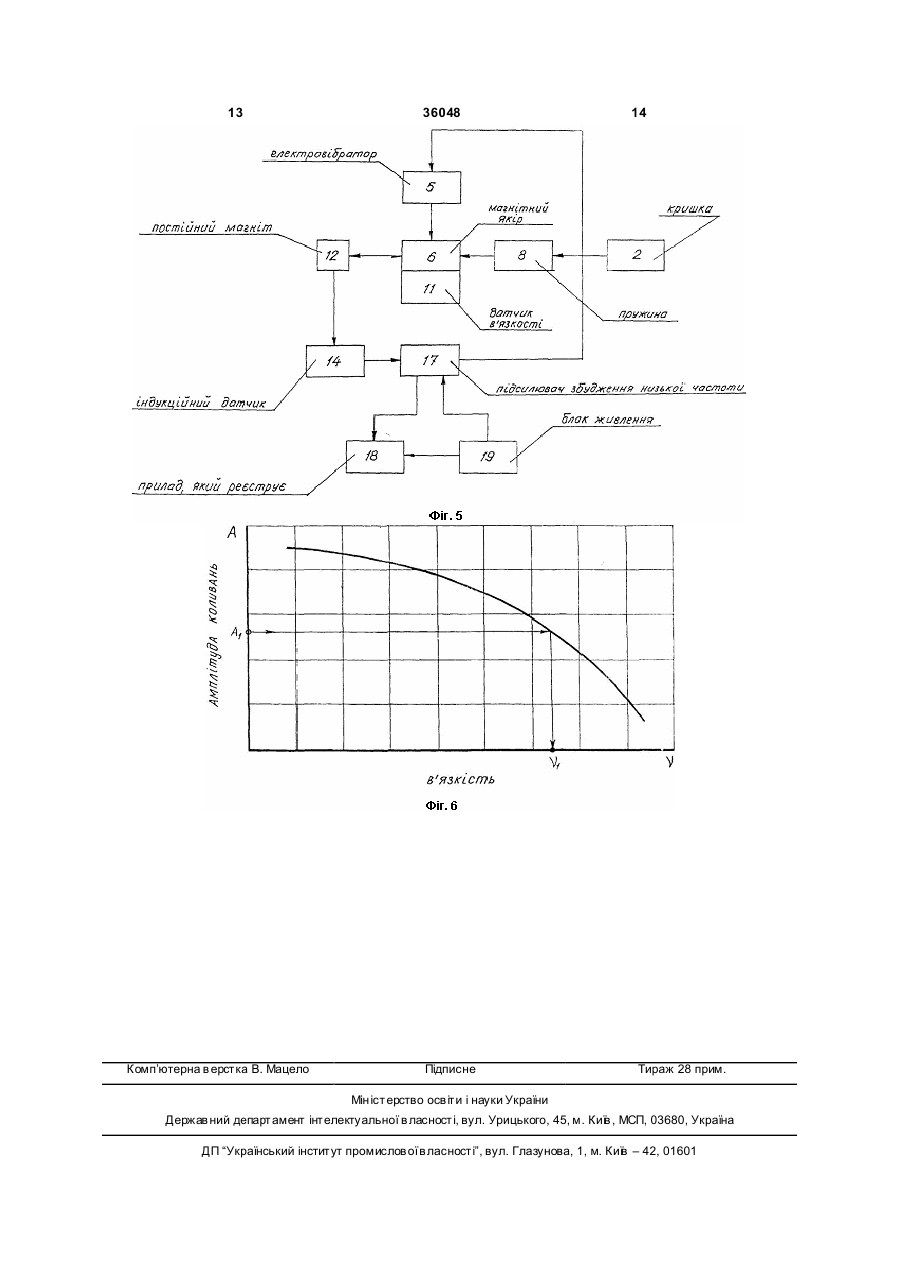
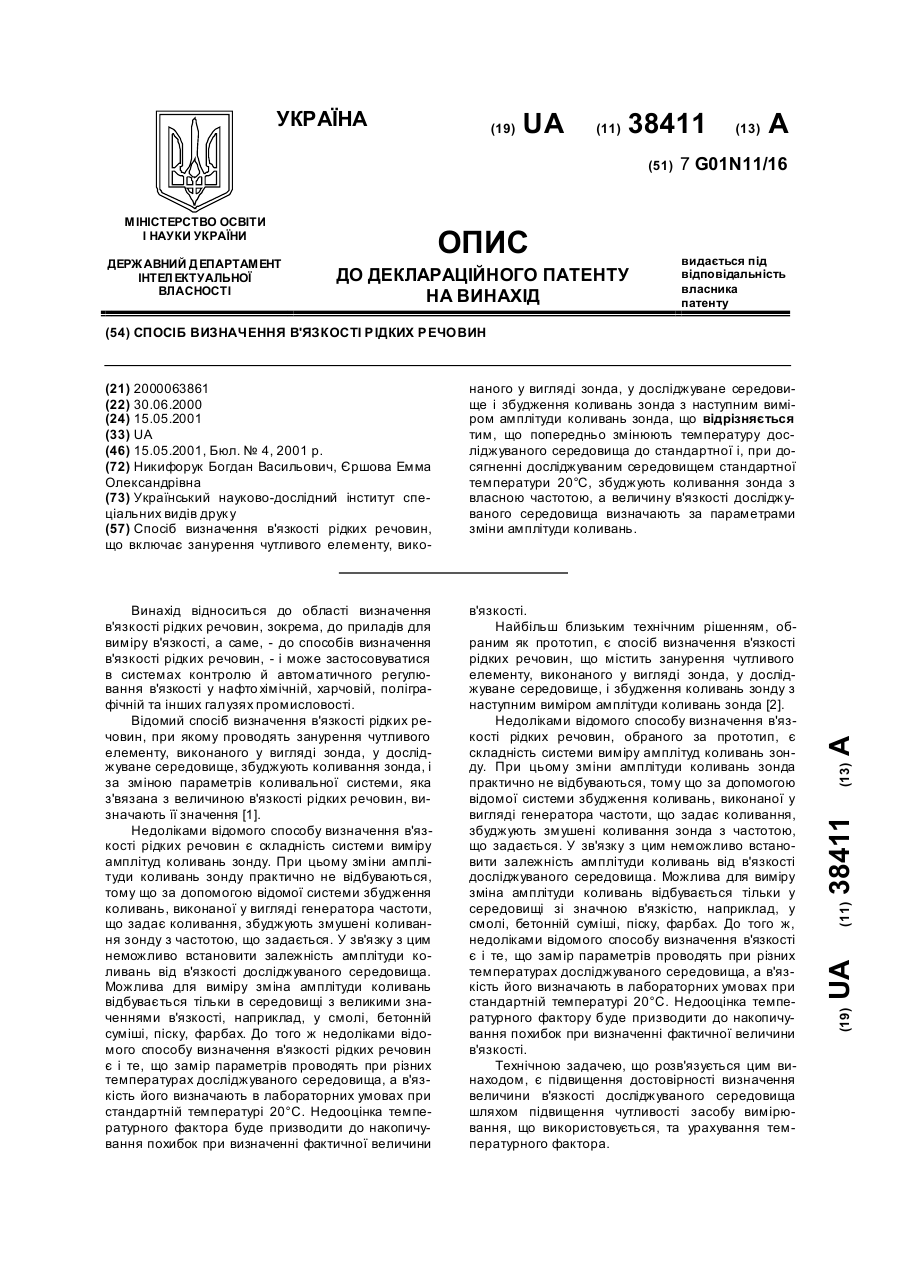
Спосіб визначення в'язкості рідких речовин, що включає занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище і збудження коливань зонда з наступним виміром амплітуди коливань зонда, який відрізняє ться попереднім проведенням заходів щодо зміни температури досліджуваного середовища до стандартної, збудженням коливання зонда з власною частотою при досягненні досліджуваним середовищем стандартної температури 20 °С, визначенням величини в'язкості досліджуваного середовища через параметри зміни амплітуди його коливань. (19) (21) u200806460 (22) 14.05.2008 (24) 10.10.2008 (46) 10.10.2008, Бюл.№ 19, 2008 р. (72) ВОРОБЙОВ ВІТАЛІЙ ІВАНОВИЧ, UA, ЄРШОВА ЕММА ОЛЕКС АНДРІВНА, UA, ЗАЙКІВСЬКИЙ ОЛЕКСАНДР БОЛЕСЛАВОВИЧ, U A, ШВЕЦЬ ЮРІЙ ВОЛОДИМИРОВИЧ, UA (73) ВІДКРИТЕ АКЦІОНЕРНЕ ТОВАРИСТВО "УКРАЇНСЬКИЙ НАУКОВО-ДОСЛІДНИЙ ІНСТИТУТ СПЕЦІАЛЬНИХ ВИДІВ ДРУКУ" КОРПОРАТИВНЕ ПІДПРИЄМСТВО ДАК "УКРВИДАВПОЛІГРАФІЯ", UA 3 36048 4 оцінка температурного фактору буде призводити ливань, що реагують на зміну в'язкості середовидо накопичування похибок при визначенні фактичща, в якому занурений зонд. ної величини в'язкості. Попередньо проводять тарування вібраційного В основу корисної моделі поставлено задачу віскозиметра за еталонними значеннями величин шляхом підвищення чутливості робочого органа в'язкості n матеріалу (речовини) 22, що отримані забезпечити підвищення достовірності визначення за допомогою інших відомих методів контролю, величини в'язкості досліджуваного середовища та наведених, наприклад, у [5]. Для цього доводять врахування температурного фактора. температуру t досліджуваного середовища до стаРішення технічної задачі у способі визначення ндартної температури, яка дорівнює 20°С, збув'язкості рідких речовин, що включає занурення джують коливання датчика в'язкості з власною чутливого елемента, виконаного у вигляді зонда, у частотою і приводять до відповідності амплітуди А досліджуване середовище, і збудження коливань власних коливань датчика в'язкості з в'язкістю n зонда з наступним виміром амплітуди коливань матеріалу (речовини) 22 для кожного з численних зонда, досягається попереднім проведенням задосліджуваних матеріалів (речовин) 22. За одерходів щодо зміни температури досліджуваного жаними внаслідок контролю значеннями амплітуди середовища до стандартної, збудженням коливанА власних коливань і відомих величин в'язкості n ня зонда з власною частотою при досяганні досліматеріалу (речовини) 22 за стандартної темпераджуваним середовищем стандартної температури тури досліджуваного середовища 20°С, будують 20°С, визначенням величини в'язкості досліджуваграфік залежності амплітуди А власних коливань ного середовища через параметри зміни амплітудатчика в'язкості від в'язкості n матеріалу (речовиди його коливань. ни) 22 та температури t (див. Фіг.6). Відповідно до Порівняльний аналіз технічного рішення з прографіка залежності А=f(nt), кожному із значень A тотипом показує, що спосіб визначення в'язкості амплітуди власних коливань датчика в'язкості бурідких речовин, що заявляється, відрізняється де відповідати визначене значення n в'язкості матим, що попередньо змінюють температуру дослітеріалу (речовини) 22. джуваного середовища до стандартної і, при досяМаючи тарувальний графік залежності амплігненні досліджуваним середовищем стандартної туди A власних коливань датчика в'язкості від в'язтемператури 20°С, збуджують коливання зонда з кості n матеріалу (речовини) 22 та температури t, власною частотою, а величину в'язкості досліджуприступають до досліджень з використанням приваного середовища визначають через параметри ладу, за допомогою якого виконувались контрольні зміни амплітуди його коливань. вимірювання амплітуди A власних коливань датТаким чином, спосіб визначення в'язкості рідчика в'язкості. ких речовин, що пропонується, відповідає критерію Для пояснення суті способу визначення в'язкорисної моделі «новизна». кості рідких речовин обране устатк ування, наприСуть способу визначення в'язкості рідких реклад, у вигляді вібраційного віскозиметра, який човин пояснюється за допомогою креслень, де на містить, як варіант конструкції (див. Фіг.1), корпус 1 Фіг.1 наведено конструктивно-компонувальну схеіз торцевими кришками 2 і внутрішніми перегородму приладу, за допомогою якої проводять визнаками 3, до яких кріпляться підшипники ковзання 4, чення в'язкості дисперсного середовища; на Фіг.2які виконані, наприклад, з фторопласту (матеріалу, 3 наведені схеми роботи зонда, відповідно, у перщо має один з найменших коефіцієнтів тертя), і шому і др угому напівперіодах його коливань; на електровібратори 5, які виконані, наприклад, у виФіг.4 наведено схему розміщення устаткування гляді електромагнітних котушок. Усередині котудля реалізації способу визначення в'язкості дисшок (електровібраторів 5) проходить магнітний персного середовища (як варіант конструктивного якір 6, що конструктивно виконаний двополюсним. виконання); на Фіг.5 наведена блок-схема прилаНа торцях магнітного якоря 6 закріплені жорстко ду, за допомогою якого проводять визначення в'явтулки 7, які виконані, наприклад, із бронзи з полізкості рідких речовин; на Фіг.6 наведена залежрованою зовнішньою поверхнею. У торці кришок 2 ність амплітуди А коливань зонда від в'язкості n і магнітного якоря 6 опираються пружини 8, які досліджуваного середовища та його температури повинні мати однакові характеристики жорсткості. t. На рухомому магнітному якорі 6 (у його геометриСуть способу визначення в'язкості рідких речній середині) закріплені кронштейни 9 і 10. На човин пояснюється за допомогою устаткування, вільному кінці кронштейна 9 закріплений робочий наприклад, вібраційного віскозиметра, конструкція орган 11 датчика в'язкості, а на кронштейні 10 якого наведена у [3], [4], або за допомогою інших постійний магніт 12 (N/S). Кронштейни 9 і 10 проприладів. Кожен із вищезазначених приладів місходять крізь прорізи 13, що виконані у корпусі 1. тить зонд, закріплений із можливістю здійснення Індукційні датчики 14 закріплені на рухомих осномаятникових коливань, і систему збудження коливах 15 (як варіант конструктивного виконання). вань зонда, що містить електровібратори, індукПереміщення рухомих основ 15 із закріпленими на ційні датчики, магніт, закріплений на зонді з можних індукційними датчиками 14 відносно постійноливістю взаємодії з індукційними датчиками, го магніту 12 провадиться за допомогою регулюпідсилювач низькочастотних коливань і прилад, вальних гвинтів 16 (як варіант конструктивного який реєструє амплітуду коливань. Як прилад, виконання). Збудження коливань датчика в'язкості який реєструє амплітуду коливань, може бути виз робочим органом 11 здійснюється за допомогою користаний реєстратор лінійних переміщень зонподавання живлення з підсилювача збудження да. При цьому зонд і електровібратори включені у низької частоти 17 на електровібратори 5. До схечастотно-вибіркову ланку системи збудження ко 5 36048 6 ми виміру вихідного сигналу датчика в'язкості вхоустановлюють на кришці 23, що закриває ємність дить реєстраційний прилад 18. Як прилад, який 21 з досліджуваним матеріалом (рідкою речовиреєструє амплітуду коливань, може бути викорисною) 22, так, щоб кронштейн 9 з закріпленим на таний реєстратор лінійних переміщень зонда. ньому робочим органом 11 проходив у отвір 24 на Прилад 18, який реєструє амплітуду коливань зозгаданій кришці 23. Електричне коло 20 від індукнда, виконаний сполученим з блоком (джерелом) ційних датчиків 14 і електровібраторів 5 вібраційживлення 19 і електровібратором 5 електричними ного віскозиметра з'єднують із входами, відповідкабелями 20. При цьому виходи індукційних датчино, підсилювача збудження низької частоти 17 і ків 14 виконані сполученими з підсилювачем збуреєстраційного приладу 18 (реєстратора лінійних дження 17, а виходи останнього (позиція 17) - елепереміщень зонда). Виходи підсилювача збудженктровібратором 5, блоком живлення 19 і приладом ня низької частоти 17 і приладу 18, який реєструє 18 (реєстратором лінійних переміщень зонда) елелінійні переміщення зонда, з'єднують електричним ктричними кабелями 20 (див. Фіг.4-5). Для провеколом 20 із входом блока живлення 19 (див. Фіг.4дення досліджень додатково використовують єм5). ність 21 для досліджуваного матеріалу (рідкої Проводять перевірку відповідності температуречовини) 22. Як варіант конструкції ємність 21 ри досліджуваного матеріалу (рідкої речовини) 22 виконують у вигляді циліндра з закритою нижньою стандартній температурі 20°С (за допомогою терчастиною. Ємність 21 конструктивно може містити мометра 25) та занурення робочого органа 11 у кришку 23 з отвором 24 для проходження крондосліджуваний матеріал (рідку речовину) 22. Роштейну 9 із закріпленим на ньому робочим оргабочий орган 11 датчика в'язкості повинен бути цілном 11. Всередині корпусу ємності 21 встановлюком зануреним у згаданий досліджуваний матеріал ють термометр 25 та нагрівальний елемент 26. (рідку речовину) 22. Корпус 27 ємності 21 додатково споряджають зовПри відповідності вищезазначеним вимогам нішньою стінкою 28, яку встановлюють на відстані щодо температури досліджуваного матеріалу (рідвід базової стінки корпуса 27. При цьому конструккої речовини) 22 та занурення робочого органа 11 тивно виконують порожнину 29, яка утворюється у досліджуваний матеріал (рідку речовину) 22, базовою стінкою корпуса 27 і додатковою стінкою вмикають блок (джерело) живлення 19 і подають 28, герметично закритою. Для підведення у вн утживлення на підсилювач збудження 17 і реєстрарішню порожнину 29 охолодженої або нагрітої реційний прилад 18. човини, наприклад, води, азоту, пару, на стінці 28 При взаємодії магнітного поля постійного магвстановлюють патрубки 30 для підведення зазнаніту 12 з індукційними датчиками 14 в одному з них ченої охолодженої або нагрітої речовини (позиція (наприклад, лівому - відповідно до Фіг.1) буде ви31). Виходи нагрівального елемента 26 з'єднують з роблятися сигнал у вигляді електрорушійної сили блоком (джерелом) живлення 19 за допомогою (ЕРС) індукції. З цього індукційного датчика 14 електричних кабелів 20. сигнал у вигляді ЕРС індукції буде подаватися на Вібраційний віскозиметр працює таким чином. підсилювач збудження 17 і з останнього (вже підПеред початком досліджень заповнюють ємсилений) - на обмотки котушки електровібратора 5 ність 21 досліджуваним матеріалом (рідкою речо(наприклад, лівої - відповідно до Фіг.1) та на вхід виною) 22 до визначеного рівня і закривають криреєстраційного приладу 18 (див. Фіг.4-5). При цьошкою 23. Проводять замір температури му обмотки котушки електровібратора 5 утворюдосліджуваного матеріалу 22, наприклад, за допоють електромагнітне поле. Під дією електромагнімогою термометра 25. Якщо температура дослітного поля, яке утворено обмотками котушки джуваного матеріалу (рідкої речовини) 22 не віделектровібратора 5, рухомий магнітний якір 6, що повідає стандартній, а саме 20°С, то її приводять у конструктивно виконаний двополюсним, буде вивідповідність до стандартної температури t=20°С. штовхуватися зі згаданої котушки 5 у напрямку Наприклад, якщо температура досліджуваного іншої котушки 5 (правої - відповідно до схеми на матеріалу (рідкої речовини) 22 менше ніж 20°С, то Фіг.1), яка не працює у перший напівперіод коливмикають нагрівальний елемент 26, який є занувань. Рухомий магнітний якір 6, що опирається на реним у досліджуваний матеріал (речовину) 22, підшипники ковзання 4 втулками 7, буде ковзати що знаходиться у ємності 21, і нагрівають досліпо них практично без тертя (у зв'язку з тим, що джуваний матеріал 22 до відповідної температури матеріал підшипників ковзання 4 вибирається з t=20°С. Або для нагрівання досліджуваного матемінімальним коефіцієнтом тертя, наприклад, фторіалу (рідкої речовини) 22 використовують метод ропласт, а визначені підшипники ковзання 4 додапропускання нагрітої речовини, наприклад, газу тково контактують із полірованою поверхнею втуабо води (позиція 31), крізь порожнину 29 між корлок 7). Переміщення рухомого магнітного якоря 6 пусом 27 ємності 21 та додатковою стінкою 28. буде викликати стиск пружини 8 (правої - відповідЯкщо температура досліджуваного матеріалу (рідно до схеми на Фіг.1). Зазначена пружина 8 при кої речовини) 22 більше ніж 20°С, то для охолосвоєму стиску буде накопичувати енергію. Напридження досліджуваного матеріалу (рідкої речовикінці переміщення рухомого магнітного якоря 6 ни) 22 використовують метод пропускання (див. Фіг.2), коли буде досягнуте рівноважне полохолодної речовини, наприклад, газу, азоту або ження (коли сила впливу електромагнітного поля води (позиція 31), крізь порожнину 29 між корпуна магнітний якір 6 буде дорівнювати силі затягусом 27 ємності 21 та додатковою стінкою 28. вання пружини 8), згаданий магнітний якір 6 зупиВодночас з приведенням досліджуваного маниться. У цей момент індукційний датчик 14 (лівий теріалу (рідкої речовини) 22 до відповідності стан- відповідно до схеми на Фіг.1) припинить вироблядартній температурі 20°С, вібраційний віскозиметр ти сигнал у вигляді ЕРС індукції (сигнал буде дорі 7 36048 8 внювати «нулю»), а задіяний електровібратор 5 За допомогою реєстраційного приладу 18 (назнеструмиться. Рухомий магнітний якір 6 під дією приклад, реєстратора лінійних переміщень зонда), пружини 8 (правої - відповідно до схеми на Фіг.1), визначають фактичну амплітуду А1 власних колияка є опертою одним кінцем у рухому кришку 2, а вань датчика з робочим органом 11, що буде віддругим - у торець магнітного якоря 6, почне переповідати фактичному значенню в'язкості n 1 досліміщуватися у зворотний бік. При цьому постійний джуваного матеріалу (рідкої речовини) 22. Для магніт 12 почне взаємодіяти з іншим індукційним цього на графіку залежності А=f(n,t) на осі А вибидатчиком 14 (правим - відповідно до схеми на рають фактичне значення амплітуди A1 власних Фіг.1). Визначений датчик 14 почне виробляти сигколивань, проводять перпендикуляр до перетину з нал у вигляді ЕРС індукції і за вищевказаною схекривою і з точки перетину з кривою опускають пемою подавати його на підсилювач збудження 17, а рпендикуляр на вісь n. Отримане значення в'язкопотім, вже підсилений, на котушку електровібратості n 1 буде відповідати фактичній в'язкості n 1 дора 5 (праву - відповідно до схеми на Фіг.1), що бусліджуваного матеріалу (рідкої речовини) 22 (див. де працювати у др угий напівперіод коливань, та на Фіг.6). вхід реєстраційного приладу 18. Під дією електроДля спрощення операції визначення фактичмагнітного поля зазначеної котушки 5 (правої ної величини в'язкості n прилад 18, який реєструє відповідно до схеми на Фіг.1) рухомий магнітний амплітуду коливань, може бути відградуйованим якір 6 почне переміщуватися убік іншої котушки 5 за розмірністю в'язкості. (лівої - відповідно до схеми на Фіг.1), стискаючи Підвищення ефективності застосування спопружину 8 (ліву - відповідно до схеми на Фіг.1). собу визначення в'язкості рідкої речовини, що Наприкінці переміщення рухомого магнітного якопропонується, у порівнянні з прототипом досягаря 6 (див. Фіг.2), коли буде досягнуте рівноважне ється за рахунок підвищення точності визначення положення (коли сила впливу електромагнітного амплітуди коливань чутливого елемента, зануреполя на магнітний якір 6 буде дорівнювати силі ного у досліджуване середовище, а саме, за рахузатягування пружини 8), згаданий магнітний якір 6 нок використання авторезонансних режимів колизнову зупиниться. У цей момент індукційний датвань динамічної системи, які найбільш точно чик 14 (правий - відповідно до схеми на Фіг.1) привідображають зміну впливу величини в'язкості на пинить виробляти сигнал у вигляді ЕРС індукції згадану динамічну систему. У способі визначення (сигнал буде дорівнювати «нулю»), а задіяний в'язкості рідкої речовини, що пропонується, викоелектровібратор 5 знеструмиться. Рухомий магнітристовується коливальна система самоналагоний якір 6 під дією пружини 8 (лівої - відповідно до джувального типу, динамічні характеристики якої схеми на Фіг.1), яка є опертою одним кінцем у рузалежать тільки від жорсткості вмонтованих пружхому кришку 2, а другим - у торець магнітного яконих елементів (пружин) і від реологічних характеря 6, почне переміщуватися у зворотний бік. ристик досліджуваного середовища, зокрема, від Таким чином, виникають незатухаючі у часі в'язкості. Підвищення ефективності застосування механічні коливання динамічної системи «магнітспособу визначення в'язкості рідкої речовини доний якір 6 - пружини 8» і пов'язаного з нею датчика сягається також тим, що при проведенні контрольв'язкості з робочим органом 11, що занурений у них вимірювань в'язкості її приводять до стандардосліджуваний матеріал (речовину) 22. У залежтної температури, за якою визначають фактичну ності від в'язкості n досліджуваного матеріалу (рідв'язкість досліджуваного середовища. кої речовини) 22 амплітуда А власних коливань Джерела інформації: буде різною за усіх інших рівних умов (сили попе1. А.С. СРСР №775667 від 30.10.80, (бюлетень реднього затягування пружин 8, визначеному ви№40), МПК G01N11/16 -аналог. гляду робочого органа 11, відстані між індукційни2. А.С. СРСР №685957 від 18.09.79., МПК ми датчиками 14 і постійним магнітом 12, G01N11/16 - прототип. параметрами котушки 5, температури досліджува3. А.С. СРСР №212615, МПК G01N11/16, 1967. ного матеріалу 22). При дотриманні усіх вищевка4. А.С. СРСР № 238875, МПК G01N11/16, заних умов амплітуда А власних коливань динамі1966. чної системи «магнітний якір 6 - пружини 8» і 5. Н.И. Орел, Э.В. Губачек, Б.И. Березин, В.М. пов'язаного з нею датчика в'язкості з робочим орВодолазская. Справочник технологаганом 11 буде відповідати визначеній величині полиграфиста. - Ч.5. Печатные краски. - М.: Книга, в'язкості n досліджуваного матеріалу (речовини) 1988. - С.188-202, § 4.3. Реологические свойства 22. красок для издательских целей. 9 36048 10 11 36048 12 13 Комп’ютерна в ерстка В. Мацело 36048 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of viscosity of liquid substances
Автори англійськоюVorobiov Vitalii Ivanovych, Yershova Emma Oleksandrivna, Zaikivskyi Oleksandr Boleslavovych, Shvets Yurii Volodymyrovych
Назва патенту російськоюСпособ определения вязкости жидких веществ
Автори російськоюВоробьев Виталий Иванович, Ершова Эмма Александровна, Зайкивский Александр Болеславович, Швец Юрий Владимирович
МПК / Мітки
МПК: G01N 11/16
Мітки: рідких, речовин, визначення, в'язкості, спосіб
Код посилання
<a href="https://ua.patents.su/7-36048-sposib-viznachennya-vyazkosti-ridkikh-rechovin.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення в’язкості рідких речовин</a>
Спосіб визначення в’язкості рідких речовин
Номер патенту: 38411
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/10, G01N 11/16
Мітки: в'язкості, спосіб, рідких, речовин, визначення
Текст:
...досліджуваного матеріалу (рідкої речовини) 22 використовують метод пропускання холодної речовини, наприклад, газу, азоту або води (позиція 31), крізь порожнину 29 між корпусом 27 ємності 21 та додатковою стінкою 28. Водночас з приведенням досліджуваного матеріалу (рідкої речовини) 22 до відповідності стандартній температурі 20°С, вібраційний віскозиметр установлюють на кришці 23, що закриває ємність 21 з досліджуваним матеріалом (рідкою...
Спосіб визначення в’язкості речовин
Номер патенту: 40910
Опубліковано: 15.08.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16
Мітки: в'язкості, визначення, спосіб, речовин
Формула / Реферат:
Спосіб визначення в'язкості речовин, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, подають електричний струм до системи збудження коливань чутливого елемента, збуджують коливання зонда, і за зміною параметрів коливальної системи, яка зв'язана з величиною в'язкості речовини, визначають її значення, який відрізняється тим, що збуджують коливання зонда з власною частотою, а величину...
Пристрій для визначення профілів концентрації рідких та газоподібних речовин вздовж ділянки
Номер патенту: 50747
Опубліковано: 15.11.2002
Автори: Франце Клаус, Йакс Петер, Кноблах Вальтер
Мітки: газоподібних, концентрації, речовин, визначення, пристрій, рідких, ділянки, профілів, вздовж
Формула / Реферат:
1. Пристрій для визначення профілів концентрації рідких або газоподібних речовин вздовж ділянки, в якому вздовж ділянки прокладений трубопровід (2), який виконаний так, що речовини можуть проникати всередину нього, причому трубопровід (2) заповнений випробуваним середовищем і стовп випробуваного середовища переміщується через трубопровід (2) через часові проміжки і пропускається вздовж датчика (11), чутливого щодо речовин, і причому між...
Ультразвуковий фазовий спосіб визначення витрати потоків рідких та газоподібних речовин у трубопроводі та пристрій для його здійснення
Номер патенту: 34512
Опубліковано: 15.03.2001
Автори: Скрипник Юрій Олексійович, Іващенко Григорій Олексійович, Здоренко Валерій Георгійович
Мітки: витрати, спосіб, рідких, потоків, здійснення, ультразвуковий, визначення, трубопроводі, пристрій, речовин, фазовий, газоподібних
Текст:
...коливань до отpимання piвностi фа зових зсувiв, що поpiвнюються, i вимipюють значення частоти модулюючих електpичних коливань, за яким судять пpо витpату, згiдно з винаходом додатково визначають суму фа зових зсувiв, що поpiвнюються, i змiнюють частоту ви сокочастотних електpичнихх коливань до досягнення фазовими зсувами, що поpiвнюються, нульови х значень, а витpату Q визначають за наступ ною фоpмулою Q= k pD 3 F 2n sin q де k – коефi...
Спосіб визначення в’язкості
Номер патенту: 44152
Опубліковано: 15.01.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: спосіб, визначення, в'язкості
Формула / Реферат:
Спосіб визначення в'язкості дисперсного середовища, що містить занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди його коливань, якими відрізняється тим, що збуджують коливання зонда з власною/авторезонансною частотою, заміряють частоту і амплітуду власних/авторезонансних коливань зонда без занурення його у досліджуване середовище, заміряють при цьому...
Попередній патент: Багатоярусна універсальна обертальна платформа
Наступний патент: Вібраційний віскозиметр
Випадковий патент: Спосіб стимуляції відтворної функції у самок сільськогосподарських тварин