Вібраційний віскозиметр
Номер патенту: 36058
Опубліковано: 10.10.2008
Автори: Зайківський Олександр Болеславович, Швець Юрій Володимирович, Воробйов Віталій Іванович, Єршова Емма Олександрівна
Формула / Реферат
Вібраційний віскозиметр, який містить корпус із закріпленим у ньому датчиком в'язкості, джерело живлення, генератор звукових коливань і схему виміру вихідного сигналу датчика, який відрізняється тим, що додатково містить не менше ніж два електровібратори, виконані у вигляді котушок збудження, закріплених симетрично усередині корпусу на відстані між собою, не менше ніж два підшипники ковзання, виконані закріпленими симетрично в отворах електровібраторів, діафрагму, яка виконана з можливістю герметизації внутрішньої порожнини корпусу, магнітний якір, виконаний розміщеним в отворах електровібраторів з можливістю поздовжнього переміщення відносно подовжньої осі електровібратора та зазначених підшипників ковзання, постійний магніт, закріплений жорстко на торцях зазначеного магнітного якоря, індукційні датчики, закріплені на стінці корпусу із зазором відносно постійного магніту, датчик в'язкості, виконаний розміщеним у геометричній середині магнітного якоря, пружини, які розміщені між датчиком в'язкості та торцями електровібраторів, при цьому на корпусі виконано отвори, генератор звукових коливань виконано у вигляді підсилювача збудження низької частоти, датчик в'язкості виконано у вигляді диска і закріпленим на магнітному якорі перпендикулярно його поздовжній осі, пружини виконано такими, що контактують з торцевою стінкою електровібраторів і датчика в'язкості, схема вимірювань вихідного сигналу датчика виконана такою, що містить частотомір та реєстратор контрольованих параметрів, виходи індукційних датчиків виконано сполученими з підсилювачем збудження низької частоти, виходи підсилювача збудження низької частоти виконано сполученими із електровібраторами через фазоінвертор, торцеві стінки корпусу виконано з можливістю їхнього переміщення відносно поздовжньої осі корпусу та магнітного якоря, виходи джерела живлення виконано сполученими зі входами підсилювача збудження коливань низької частоти, частотоміра та реєстратора контрольованих параметрів, а магнітний якір оснащено втулкою, яка виконана з полірованою поверхнею та жорстко закріпленою на зазначеному магнітному якорі в місці, що контактує з підшипниками ковзання.
Текст
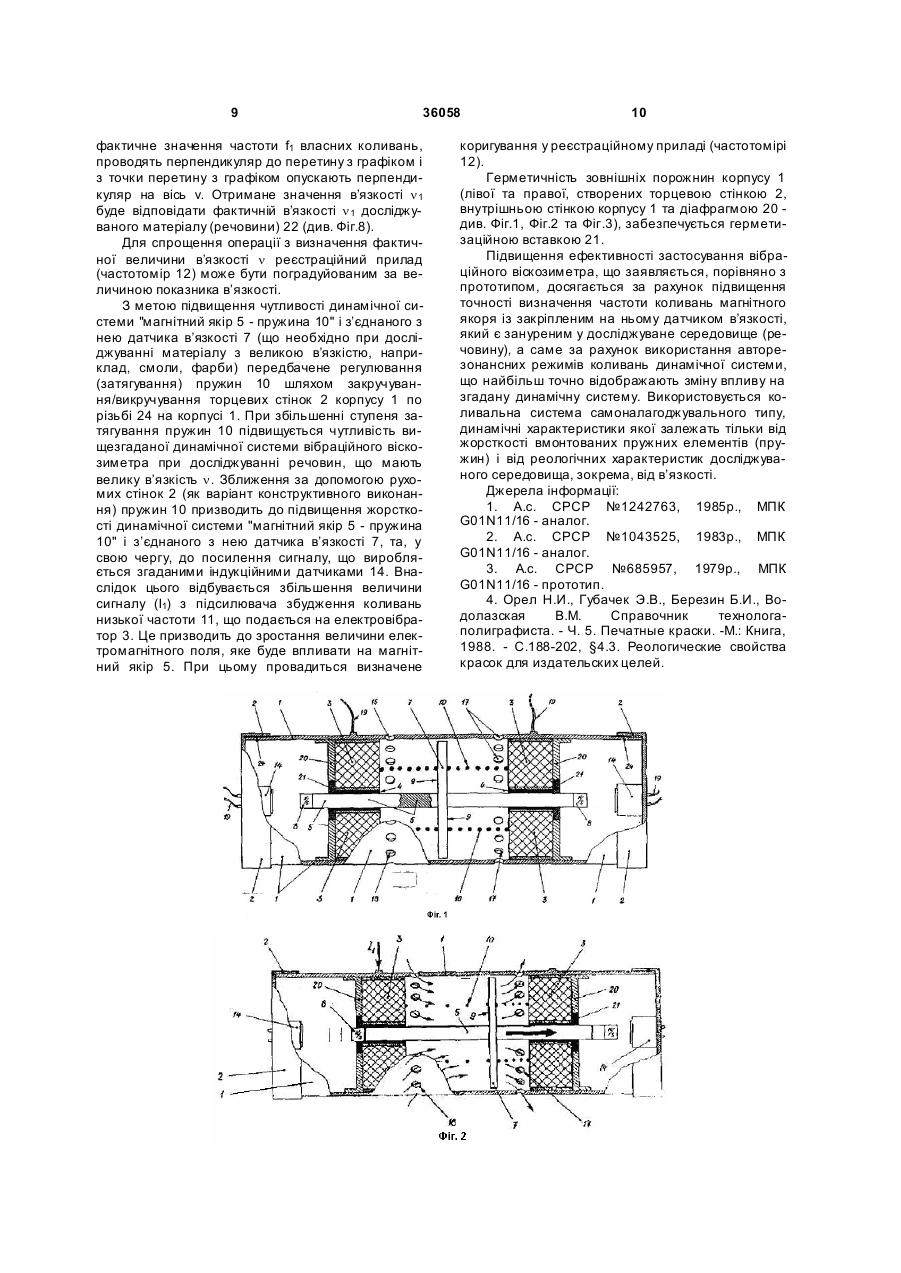
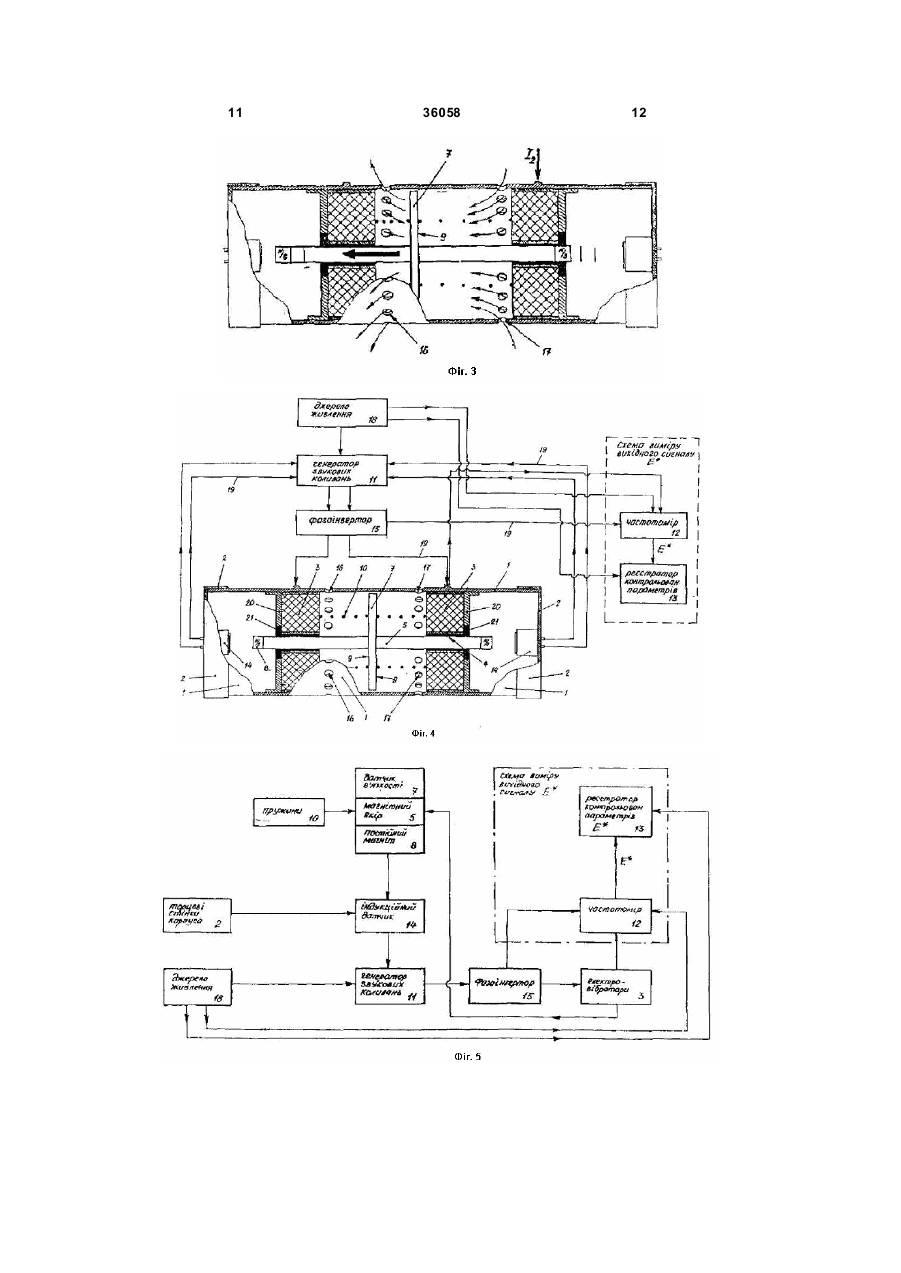
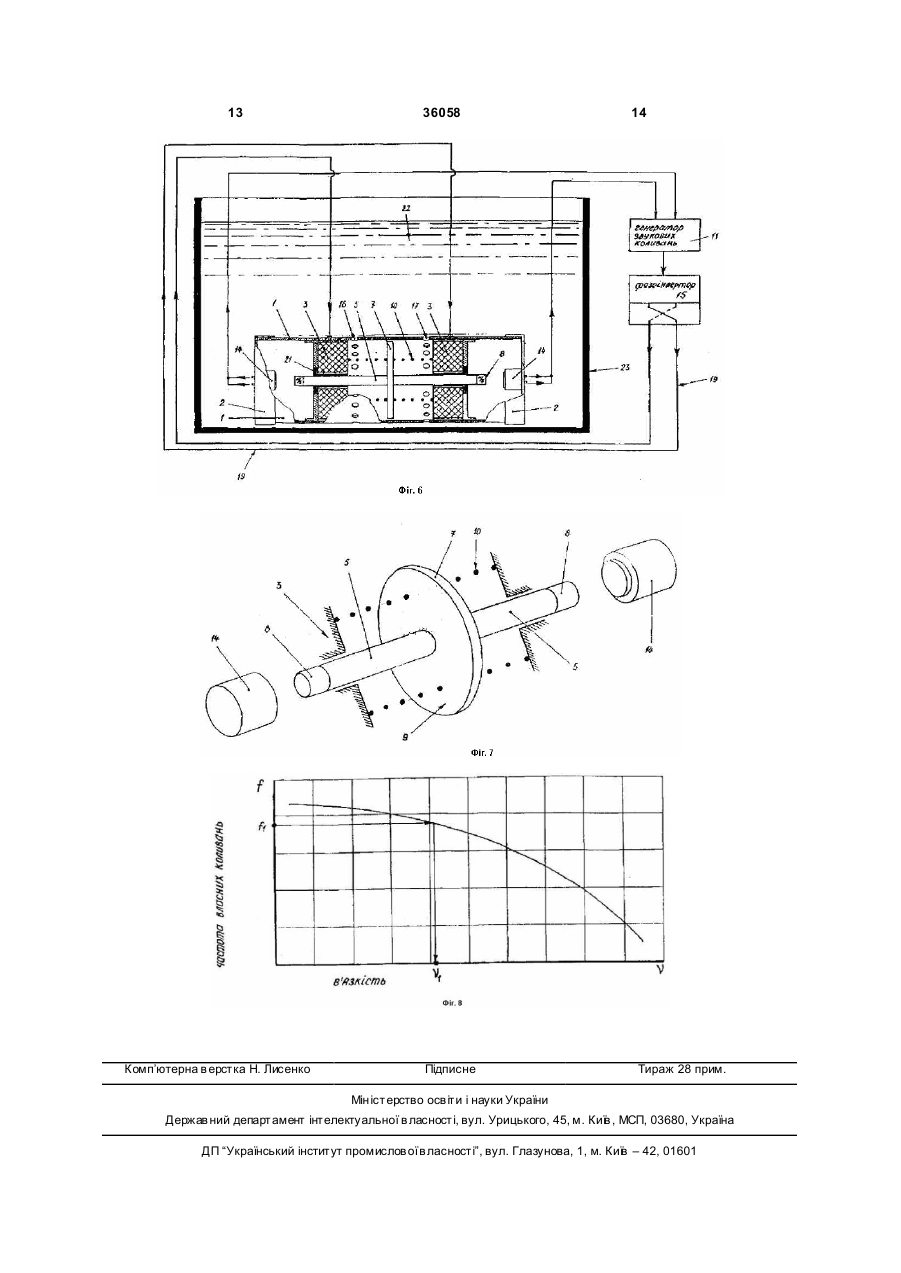
Вібраційний віскозиметр, який містить корпус із закріпленим у ньому датчиком в'язкості, джерело живлення, генератор звукових коливань і схему виміру вихідного сигналу датчика, який відрізняється тим, що додатково містить не менше ніж два електровібратори, виконані у вигляді котушок збудження, закріплених симетрично усередині корпусу на відстані між собою, не менше ніж два підшипники ковзання, виконані закріпленими симетрично в отворах електровібраторів, діафрагму, яка виконана з можливістю герметизації внутрішньої порожнини корпусу, магнітний якір, виконаний розміщеним в отворах електровібраторів з можливістю поздовжнього переміщення відносно подовжньої осі електровібратора та зазначених підшипників ковзання, постійний магніт, закріплений жорстко на торцях зазначеного магнітного U 2 36058 1 3 36058 Найбільш близьким технічним рішенням, обраним за прототип, є вібраційний віскозиметр, який містить корпус із закріпленим у ньому датчиком в’язкості, джерело живлення, генератор звукових коливань і схему вимірювань вихідного сигналу да тчика [3]. Недоліками відомого вібраційного віскозиметра, який обрано за прототип, є низька чутливість приладу, недостатня точність одержуваних результатів вимірювань параметрів коливань і, як наслідок, реологічних властивостей досліджуваного матеріалу (речовини). В основу корисної моделі поставлено задачу шляхом підвищення чутливості приладу забезпечити підвищення точності вимірювань. Суттю корисної моделі у вібраційному віскозиметрі, який містить корпус із закріпленим у ньому датчиком в’язкості, джерело живлення, генератор звукових коливань і схему вимірювань вихідного сигналу датчика, є додаткове розміщення усередині корпусу не менше ніж двох електровібраторів, виконаних у вигляді котушок збудження, симетрично закріплених усередині корпусу на відстані між собою, не менше ніж двох підшипників ковзання, виконаних закріпленими симетрично в отворах електровібраторів, діафрагм, які виконано з можливістю герметизації внутрішньої порожнини корпусу, магнітного якоря, виконаного розміщеним в отворах електровібраторів з можливістю поздовжнього переміщення відносно подовжньої осі електровібратора та зазначених підшипників ковзання, постійного магніту, закріпленого жорстко на торцях зазначеного магнітного якоря, індукційних датчиків, закріплених на стінці корпусу симетрично із зазором щодо постійного магніту, датчика в’язкості, виконаного розміщеним у геометричній середині магнітного якоря, пружин, виконаних розміщеними між датчиком в’язкості та торцями електровібраторів. Суттю корисної моделі також є виконання отворів на корпусі, генератора звукових коливань у вигляді підсилювача збудження коливань низької частоти, датчика в’язкості закріпленим на магнітному якорі перпендикулярно його поздовжньої осі у вигляді диска, пружин такими, що контактують з торцевими стінками електровібраторів і датчика в’язкості, схеми вимірювань вихідного сигналу датчика такою, що містить частотомір та реєстратор контрольованих параметрів, виходів індукційних датчиків сполученими з підсилювачем збудження коливань низької частоти, а виходів останнього - із електровібраторами через фазоінвертор, торцевих стінок корпусу з можливістю переміщення відносно поздовжньої осі корпусу та магнітного якоря, виходів джерела живлення сполученими з входами підсилювача збудження коливань низької частоти, частотоміра та реєстратора контрольованих параметрів, магнітного якоря оснащеним втулкою, втулки з полірованою поверхнею та жорстко закріпленою на зазначеному магнітному якорі у місці, що контактує з підшипниками ковзання. Порівняльний аналіз технічного рішення з прототипом дозволяє зробити висновок, що вібраційний віскозиметр, що заявляється, відрізняється тим, що він додатково містить не менше ніж два 4 електровібратори, виконаних у вигляді котушок збудження, закріплених симетрично усередині корпусу на відстані між собою, не менше ніж два підшипники ковзання, виконаних закріпленими симетрично в отворах електровібраторів, діафрагму, яка виконана з можливістю герметизації внутрішньої порожнини корпусу, магнітний якір, виконаний розміщеним в отворах електровібраторів з можливістю поздовжнього переміщення відносно подовжньої осі електровібратора та зазначених підшипників ковзання, постійний магніт, закріплений жорстко на торцях зазначеного магнітного якоря, індукційні датчики, закріплені на стінці корпусу із зазором щодо постійного магніту, датчик в’язкості, виконаний розміщеним у геометричній середині магнітного якоря, пружини, які розміщені між датчиком в’язкості та торцями електровібраторів, при цьому на корпусі виконано отвори, генератор звукових коливань виконано у вигляді підсилювача збудження низької частоти, датчик в’язкості виконано у вигляді диска і закріпленим на магнітному якорі перпендикулярно його поздовжньої осі, пружини виконано такими, що контактують з торцевою стінкою електровібраторів і датчика в’язкості, схема вимірювань вихідного сигналу датчика виконана такою, що містить частотомір та реєстратор контрольованих параметрів, виходи індукційних датчиків виконано сполученими з підсилювачем збудження низької частоти, виходи підсилювача збудження низької частоти виконано сполученими із електровібраторами через фазоінвертор, торцеві стінки корпусу виконано з можливістю переміщення відносно поздовжньої осі корпусу та магнітного якоря, виходи джерела живлення виконано сполученими зі входами підсилювача збудження коливань низької частоти, частотоміра та реєстратора контрольованих параметрів, а магнітний якір оснащено втулкою, яка виконана з полірованою поверхнею та жорстко закріпленою на зазначеному магнітному якорі в місці, що контактує з підшипниками ковзання. Таким чином, вібраційний віскозиметр, що заявляється, відповідає критерію "новизна". Суть корисної моделі пояснюється за допомогою креслень, де на Фіг.1 наведена конструктивнокомпонувальна схема вібраційного віскозиметра, на Фіг.2 наведена схема роботи вібраційного віскозиметра у перший напівперіод коливань, на Фіг.3 наведена схема роботи вібраційного віскозиметра у другий напівперіод коливань, на Фіг.4 наведена схема вібраційного віскозиметра, яка пояснює його роботу і конструкцію, на Фіг.5 наведена блок-схема вібраційного віскозиметра, яка пояснює його роботу і взаємодію конструктивних елементів, на Фіг.6 надана схема розміщення пристрою в ємкості з досліджуваним матеріалом, на Фіг.7 наведений загальний вигляд магнітного якоря з розміщеним на ньому датчиком в’язкості та схема розміщення індукційних датчиків і постійних магнітів, на Фіг.8 наведений графік залежності частоти f власних коливань датчика в’язкості від в’язкості n досліджуваного матеріалу (речовини). 5 36058 Вібраційний віскозиметр, як варіант конструкції (див. Фіг.1 та Фіг.4-5), містить корпус 1 з торцевими стінками 2. Усередині корпусу 1 встановлено (жорстко закріплено) електровібратори 3, які виконані, наприклад, у вигляді електромагнітних котушок. При цьому електровібратори 3 конструктивно встановлені усередині корпусу 1 так, щоб між ними був зазор. Усередині котушок (електровібраторів 3) жорстко закріплено не менше ніж два підшипники ковзання 4, які виконані, наприклад, з фторопласту (матеріалу, що характеризується одним з найменших коефіцієнтів тертя). Усередині котушок (електровібраторів 3) та підшипників ковзання 4 проходить магнітний якір 5. На торцях зазначеного магнітного якоря 5 встановлено з натягом втулки 6. При цьому втулки 6 виконано з полірованою поверхнею. Для виготовлення втулок 6 використовується бронза, при цьому зовнішня поверхня втулок 6 виконується полірованою для зменшення коефіцієнту тертя між підшипниками ковзання 4 та поверхнею втулок 6. У геометричній середині магнітного якоря 5 закріплено жорстко датчик в’язкості 7. Як варіант конструктивного виконання, датчик в’язкості 7 виконано у ви гляді диска, який закріплено перпендикулярно поздовжній осі магнітного якоря 4. На кожному з торців магнітного якоря 5 жорстко закріплено постійний магніт 8 (N/S). При цьому магнітний якір 5 виконано з можливістю поздовжнього переміщення відносно подовжньої осі електровібратора 3 та зазначених підшипників ковзання 4. Між торцем електровібратора 3 і торцевою стінкою 9 датчика в’язкості 7 розміщені пружини 10, при цьому пружини 10 виконано такими, що контактують з торцевою стінкою електровібратора 3 і торцевою стінкою 9 датчика в’язкості 7. Генератор звукових коливань 11 виконано у вигляді підсилювача збудження коливань низької частоти, а схема вимірювань вихідного сигналу датчика в’язкості 7 виконана такою, що містить частотомір 12 та реєстратор 13 контрольованих параметрів (Е*). На торцевих стінках 2 корпусу 1 встановлено індукційні датчики 14. Зазначені індукційні датчики 14 встановлені з можливістю переміщення відносно постійного магніту 8 (N/S). При цьому конструктивно кожний з датчиків 14 виконано розміщеним із зазором щодо постійного магніту 8. Виходи індукційних датчиків 14 виконано сполученими з підсилювачем збудження 11 коливань низької частоти, а виходи підсилювача збудження 11 коливань низької частоти виконано сполученими з електровібраторами 3 через фазоінвертор 15. Фазоінвертор 15 призначений для подачі посиленого сигналу з підсилювача збудження 11 коливань низької частоти почергово на кожний з двох електровібраторів 3 для приведення у дію магнітного якоря 5. На корпусі 1 виконано отвори 16 і 17, при цьому кількість отворів 16 і 17 з однієї частини корпусу 1 має дорівнювати кількості отворів 16 і 17 з іншої частини корпусу 1. С умарна площа отворів 16 і 17 з однієї частини корпусу 1 має дорівнювати сумарній площі отворів 16 і 17 з іншої частини корпусу 1. Стінки 2 корпусу 1, на яких встановлено індукційні датчики 14, виконані з можливістю переміщення відносно поздовжньої осі корпусу 1 та магнітного якоря 5. Виходи джерела живлення 18 6 виконано сполученими з входами підсилювача збудження 11 коливань низької частоти, частотоміра 12 та реєстратора 13 контрольованих параметрів (Е*) за допомогою електричних дротів 19. За зовнішніми торцями електровібраторів встановлено діафрагму 20, яка виконана з можливістю герметизації внутрішньої порожнини корпусу 1 за допомогою герметизаційної вставки 21. Додатковим обладнанням для проведення технологічних операцій щодо визначення фізичних властивостей речовин, наприклад, в’язкості n, шляхом вимірювань параметрів коливань динамічної системи (частоти f власних коливань), що взаємодіє з досліджуваним матеріалом 22 (речовиною), є ємкість 23. При контрольних дослідженнях у ємкість 23 наливають рідку речовину 22 і розміщують прилад (вібраційний віскозиметр). Переміщення індукційних датчиків 14 відносно постійного магніту 8 здійснюється за допомогою регулювальних (торцевих) стінок 2 корпусу 1, які (як варіант конструктивного виконання) виконано у вигляді кришок з можливістю повертання відносно осі корпусу 1 по різьбі 24 на зазначеному корпусі 1. Збудження коливань датчика в’язкості 7 провадиться за допомогою подачі живлення з генератора звукових коливань (підсилювача збудження 11 коливань низької частоти) на електровібратори 3. Вібраційний віскозиметр працює наступним чином. Попередньо проводять тарування вібраційного віскозиметра за еталонними значеннями величин в’язкості n досліджуваного матеріалу (речовини) 22, що отримані за допомогою інших відомих методів контролю, описаних, наприклад, у [4]. Для цього збуджують коливання датчика в’язкості 7 з власною (авторезонансною) частотою і приводять частоту власних коливань f датчика в’язкості 7 до відповідності з в’язкістю v досліджуваного матеріалу (речовини) 22 для кожного з численних досліджуваних матеріалів (речовин) 22. За одержаними унаслідок контролю значеннями частоти f власних коливань і відомих величин в’язкості n матеріалу (речовини) 22 будують графік залежності частоти f власних коливань датчика в’язкості 7 від в’язкості n матеріалу (речовини) 22 (див. Фіг.8). Відповідно до графіка залежності f=f(n), кожному із значень частоти f власних коливань датчика в’язкості 7 буде відповідати визначене значення в’язкості v матеріалу (речовини) 22. Маючи тарувальний графік залежності частоти f власних коливань датчика в’язкості 7 від в’язкості n досліджуваного матеріалу (речовини) 22 (див. Фіг.8), приступають до досліджень. Перед початком досліджень заповнюють ємкість 23 досліджуваним матеріалом (речовиною) 22 до визначеного рівня (див. Фіг.6). Після цього вібраційний віскозиметр занурюють у ємкість 23 з досліджуваним матеріалом (речовиною) 22, так, щоб корпус 1 приладу був повністю зануреним у досліджуваний матеріал 22 (на глибину не менше двох величин корпусів) (див. Фі г.6). Електричні дроти 19 від індукційних датчиків 14 і електровібраторів 3 вібраційного віскозиметра з’єднують з входами, відповідно, підсилювача збудження 11 коливань низької частоти (генератора 7 36058 звукових коливань) і частотоміра 12 (реєстраційного приладу). Ви ходи підсилювача збудження 11 коливань низької частоти і реєстраційного приладу (частотоміра 12), з’єднують електричним дротом 19 з входом джерела живлення 18 (див. Фіг.4, 5). Проводять перевірку занурення пристрою у досліджуваний матеріал (речовину) 22 і проникнення досліджуваного матеріалу (речовини) 22 у порожнини корпусу 1 приладу. Робочий орган (диск) датчика в’язкості 7 повинен бути цілком зануреним у згаданий досліджуваний матеріал (речовину) 22, а порожнини корпусу 1 повністю заповненими досліджуваним матеріалом 22 (див. Фіг.6). Вмикають джерело живлення 18 і подають живлення на підсилювач збудження 11 коливань низької частоти і реєстраційний прилад (частотомір 12). При взаємодії магнітного поля постійного магніту 8 (N/S) з індукційними датчиками 14 в одному з них (наприклад, лівому - відповідно до Фіг.1, 2, 4) буде вироблятися сигнал у вигляді електрорушійної сили (ЕРС) індукції. З цього індукційного датчика 14 сигнал у вигляді ЕРС індукції буде подаватися на підсилювач збудження 11 і з останнього, вже підсилений (II), - через фазоінвертор 15 на обмотки котушки електровібратора 3 (наприклад, лівоївідповідно до Фіг.1 та Фіг.2) і на вхід реєстраційного приладу (частотомір 12). При цьому обмотки котушки електровібратора 3 утворюють електромагнітне поле. Під дією електромагнітного поля, яке утворено обмотками котушки електровібратора 3, рухомий магнітний якір 5 буде виштовхува тися зі згаданої котушки 3 у напрямку іншої котушки 3 (правої - відповідно до схеми на Фіг.1 та Фіг.2), яка не працює у перший напівперіод коливань. Рухомий магнітний якір 5, що опирається на підшипники ковзання 4, буде ковзати по них практично без тертя (у зв’язку з тим, що матеріал для підшипників ковзання 4 вибирається з мінімальним коефіцієнтом тертя, наприклад, фторопласт, а визначені підшипники ковзання 4 додатково контактують з полірованою поверхнею втулки 6 рухомого магнітного якоря 5). Переміщення рухомого магнітного якоря 5 буде викликати стиск пружини 10 (правої - відповідно до схеми на Фіг.1 та Фіг.2). При цьому досліджуваний матеріал 22 буде всмоктуватися крізь отвори 16, які виконано на лівій частині корпусу 1 (згідно із схемою на Фіг.1 та Фіг.2), в порожнину, яка створена зазначеною стінкою 9 датчика в’язкості 7, внутрішньою стінкою корпусу 1 та зовнішньою поверхнею електровібратора 3 (лівого - за схемою на Фіг.2), і одночасно виштовхуватися з порожнини, яка створена торцем електровібратора 3 (правого - за схемою на Фіг.2), стінкою 9 датчика в’язкості 7 та внутрішньою стінкою корпусу 1 крізь отвори 17 на корпусі 1. При переміщенні магнітного якоря 5 (вправо за схемою на Фіг.2), зазначена пружина 10 (права за схемою на Фіг.2) при своєму стиску буде накопичувати енергію. Наприкінці переміщення рухомого магнітного якоря 5, коли буде досягнуто рівноважного положення (коли сила впливу електромагнітного поля на магнітний якір 5 буде дорівнювати силі затягування пружини 10), згада 8 ний магнітний якір 5 зупиниться. У цей момент індукційний датчик 14 (лівий - відповідно до схеми на Фіг.1 та Фіг.2) припинить виробляти сигнал у вигляді ЕРС індукції (сигнал буде дорівнювати "нулю"), а задіяний електровібратор 3 знеструмиться. Рухомий магнітний якір 5 під дією пружини 10 (правої - відповідно до схеми на Фіг.1 та Фіг.2), яка є опертою одним кінцем у рухливу стінку 9 датчика в’язкості 7, а другим - у торцеву стінку електровібратора 3, почне переміщуватися в зворотню сторону (див. Фіг.3). При цьому постійний магніт 8 (N/S) почне взаємодіяти з іншим індукційним датчиком 14 (правим - відповідно до схеми на Фіг.1 та Фіг.3). Визначений датчик 14 почне виробляти сигнал у вигляді ЕРС індукції і за вищевказаною схемою подавати його на підсилювач збудження 11 коливань низької частоти (генератор звукових коливань), а потім, вже підсилений, на котушку електровібратора 3 (праву - відповідно до схеми на Фіг.1 та Фіг.3) через фазоінвертор 15, яка буде працювати у другий напівперіод коливань, і на вхід реєстраційного приладу (частотоміра 12). Під дією електромагнітного поля зазначеної котушки 3 (правої - відповідно до схеми на Фіг.1 та Фіг.3) рухомий магнітний якір 5 почне переміщуватися у бік іншої котушки 3 (лівої - відповідно до схеми на Фіг.1 та Фіг.3), стискаючи пружину 10 (ліву - відповідно до схеми на Фіг.1 та Фіг.3). При цьому досліджуваний матеріал 22 буде всмоктуватися крізь отвори 17 на правій частині корпусу 1 (згідно із схемою на Фіг.1 та Фіг.3) у порожнину, яка створена внутрішньою стінкою корпусу 1, стінкою 9 датчика в’язкості 7 та торцевою поверхнею електровібратора 3, І одночасно виштовхуватися з порожнини, яка створена поверхнею стінки 9 датчика в’язкості 7, внутрішньою стінкою корпусу 1 та торцем електровібратора 3 крізь отвори 16 на корпусі 1 (див. Фіг.3). Таким чином, виникають незатухаючі у часі механічні коливання динамічної системи "магнітний якір 5 - пружина 10" і пов’язаного з нею датчика в’язкості 7, що занурений у досліджуваний матеріал (речовину) 22. Залежно від в’язкості v досліджуваного матеріалу (речовини) 22 частота прокачування рідини 22 крізь отвори 16 та 17 буде різною. При цьому і частота f власних коливань зазначеної динамічної системи буде різною за усіх інших рівних умов (сили попереднього затягування пружин 10, визначеному вигляду датчика в’язкості 7, відстані між індукційними датчиками 14 і постійним магнітом 8, параметрами котушки 3, сумарної площі отворів (позиції 16 та 17) в обох частинах корпусу 1 приладу). При дотриманні усіх вищевказаних умов частота f власних коливань динамічної системи "магнітний якір 5 - пружина 10" і пов’язаного з нею датчика в’язкості 7 буде відповідати визначеній величині в’язкості n досліджуваного матеріалу (речовини) 22. За допомогою реєстраційного приладу (наприклад, електронно-обчислювального частотоміра 12), визначають фактичну частоту f 1 власних коливань датчика в’язкості 7, що буде відповідати фактичному значенню в’язкості n 1 досліджуваного матеріалу (речовини) 22. Для цього на графіку залежності f=f(n) (див. Фіг.8) на осі f вибирають 9 36058 фактичне значення частоти f1 власних коливань, проводять перпендикуляр до перетину з графіком і з точки перетину з графіком опускають перпендикуляр на вісь v. Отримане значення в’язкості n 1 буде відповідати фактичній в’язкості n 1 досліджуваного матеріалу (речовини) 22 (див. Фіг.8). Для спрощення операції з визначення фактичної величини в’язкості n реєстраційний прилад (частотомір 12) може бути поградуйованим за величиною показника в’язкості. З метою підвищення чутливості динамічної системи "магнітний якір 5 - пружина 10" і з’єднаного з нею датчика в’язкості 7 (що необхідно при досліджуванні матеріалу з великою в’язкістю, наприклад, смоли, фарби) передбачене регулювання (затягування) пружин 10 шляхом закручування/викручування торцевих стінок 2 корпусу 1 по різьбі 24 на корпусі 1. При збільшенні ступеня затягування пружин 10 підвищується чутливість вищезгаданої динамічної системи вібраційного віскозиметра при досліджуванні речовин, що мають велику в’язкість n. Зближення за допомогою рухомих стінок 2 (як варіант конструктивного виконання) пружин 10 призводить до підвищення жорсткості динамічної системи "магнітний якір 5 - пружина 10" і з’єднаного з нею датчика в’язкості 7, та, у свою чергу, до посилення сигналу, що виробляється згаданими індукційними датчиками 14. Внаслідок цього відбувається збільшення величини сигналу (І1) з підсилювача збудження коливань низької частоти 11, що подається на електровібратор 3. Це призводить до зростання величини електромагнітного поля, яке буде впливати на магнітний якір 5. При цьому провадиться визначене 10 коригування у реєстраційному приладі (частотомірі 12). Герметичність зовнішніх порожнин корпусу 1 (лівої та правої, створених торцевою стінкою 2, внутрішньою стінкою корпусу 1 та діафрагмою 20 див. Фіг.1, Фіг.2 та Фіг.3), забезпечується герметизаційною вставкою 21. Підвищення ефективності застосування вібраційного віскозиметра, що заявляється, порівняно з прототипом, досягається за рахунок підвищення точності визначення частоти коливань магнітного якоря із закріпленим на ньому датчиком в’язкості, який є зануреним у досліджуване середовище (речовину), а саме за рахунок використання авторезонансних режимів коливань динамічної системи, що найбільш точно відображають зміну впливу на згадану динамічну систему. Використовується коливальна система самоналагоджувального типу, динамічні характеристики якої залежать тільки від жорсткості вмонтованих пружних елементів (пружин) і від реологічних характеристик досліджуваного середовища, зокрема, від в’язкості. Джерела інформації: 1. А.с. СРСР №1242763, 1985p., МПК G01N11/16 - аналог. 2. А.с. СРСР №1043525, 1983р., МПК G01N11/16 - аналог. 3. А.с. СРСР №685957, 1979р., МПК G01N11/16 - прототип. 4. Орел Н.И., Губачек Э.В., Березин Б.И., Водолазская В.М. Справочник технологаполиграфиста. - Ч. 5. Печатные краски. -М.: Книга, 1988. - С.188-202, §4.3. Реологические свойства красок для издательских целей. 11 36058 12 13 Комп’ютерна в ерстка Н. Лисенко 36058 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVibration viscosimeter
Автори англійськоюVorobiov Vitalii Ivanovych, Yershova Emma Oleksandrivna, Zaikivskyi Oleksandr Boleslavovych, Shvets Yurii Volodymyrovych
Назва патенту російськоюВибрационный вискозиметр
Автори російськоюВоробьев Виталий Иванович, Ершова Эмма Александровна, Зайкивский Александр Болеславович, Швец Юрий Владимирович
МПК / Мітки
МПК: G01N 11/16
Мітки: віскозиметр, вібраційний
Код посилання
<a href="https://ua.patents.su/7-36058-vibracijjnijj-viskozimetr.html" target="_blank" rel="follow" title="База патентів України">Вібраційний віскозиметр</a>
Вібраційний віскозиметр
Номер патенту: 38712
Опубліковано: 15.05.2001
Автори: Никифорук Богдан Васильович, Комаров Володимир Олександрович, Єршова Емма Олександрівна
МПК: G01N 11/00, G01N 11/16
Мітки: віскозиметр, вібраційний
Текст:
...власних коливань датчика в'язкості від в'язкості n матеріалу (речовини) 19 (див. фіг. 7). Відповідно до графіка залежності f=¦(n) кожному із значень f частоти власних коливань датчика в'язкості 8 буде відповідати визначене значення n в'язкості матеріалу (речовини) 19. Маючи тарувальний графік залежності частоти f власних коливань датчика в'язкості 8 від в'язкості n матеріалу (речовини) 19 (див. фіг. 7), приступають до досліджень. Перед...
Вібраційний віскозиметр

Номер патенту: 36053
Опубліковано: 10.10.2008
Автори: Швець Юрій Володимирович, Воробйов Віталій Іванович, Зайківський Олександр Болеславович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: віскозиметр, вібраційний
Формула / Реферат:
Вібраційний віскозиметр, який містить корпус із закріпленим на ньому датчиком в'язкості, блок живлення, генератор звукових коливань і схему вимірювань вихідного сигналу датчика, який відрізняється тим, що додатково містить не менш ніж два електровібратори, які виконані у вигляді котушок збудження коливань та симетрично закріплені усередині корпуса, не менш ніж два підшипники ковзання, що виконані закріпленими симетрично в отворах...
Вібраційний віскозиметр
Номер патенту: 38711
Опубліковано: 15.05.2001
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна, Комаров Володимир Олексадрович
МПК: G01N 11/00, G01N 11/16
Мітки: віскозиметр, вібраційний
Текст:
...8 з в'язкістю n досліджуваного матеріалу (речовини) 20 для кожного з численних досліджуваних матеріалів (речовин) 20. За одержаними внаслідок контролю значеннями частоти f власних коливань і відомих величин в'язкості n матеріалу (речовини) 20 будують графік залежності частоти f власних коливань датчика в'язкості від в'язкості n матеріалу (речовини) 20 (див. фіг. 7). Відповідно до графіка залежності f=¦(n), кожному із значень f частоти...
Вібраційний віскозиметр
Номер патенту: 38940
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович, Комаров Володимир Олексадрович
МПК: G01N 11/16
Мітки: віскозиметр, вібраційний
Формула / Реферат:
(21) 2000116776(54) (57) Дата прийняття рішення 19 квітня 2001р.1. Вібраційний віскозиметр, який містить корпус із закріпленим у ньому датчиком в'язкості, джерело живлення,...
Вібраційний віскозиметр
Номер патенту: 41137
Опубліковано: 15.08.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16, G01N 11/00
Мітки: вібраційний, віскозиметр
Формула / Реферат:
1. Вібраційний віскозиметр, який містить корпус із закріпленим у ньому датчиком в'язкості, джерело живлення, генератор звукових коливань і схему виміру вихідного сигналу датчика, що відрізняється тим, що він додатково містить не менше ніж два електровібратори, виконані у вигляді котушок збудження, симетрично закріплених усередині корпуса на відстані між собою, не менше ніж два підшипники ковзання, виконані симетрично закріпленими в отворі...
Попередній патент: Вібраційний віскозиметр
Наступний патент: Вібраційний віскозиметр
Випадковий патент: Теплова вітроустановка