Спосіб оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна
Формула / Реферат
Спосіб оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна, що полягає у отриманні з радара даних істинного курсу Кіц і швидкості Vсц цілі, дистанції D до неї і істинного пеленга на ціль ІП і даних власного судна - істинного курсу Кіс, швидкості V0 і інерційних характеристик, за допомогою комп'ютерного обладнання визначають чотири параметри: швидкість ухилення Vy, момент t початку зміни швидкості від початкової V0 до Vy, момент завершення перехідного процесу tуk, коли досягається значення Vy, і момент t початку перехідного процесу від швидкості V0 до Vy, за отриманими даними здійснюють аналіз множини маневрів розходження суден зміною швидкості по критерію втрат ходового часу і отримують значення швидкості руху судна Vy, за якою судно чисто розходиться з ціллю на заданій дистанції найкоротшого зближення маневром зміни швидкості.
Текст
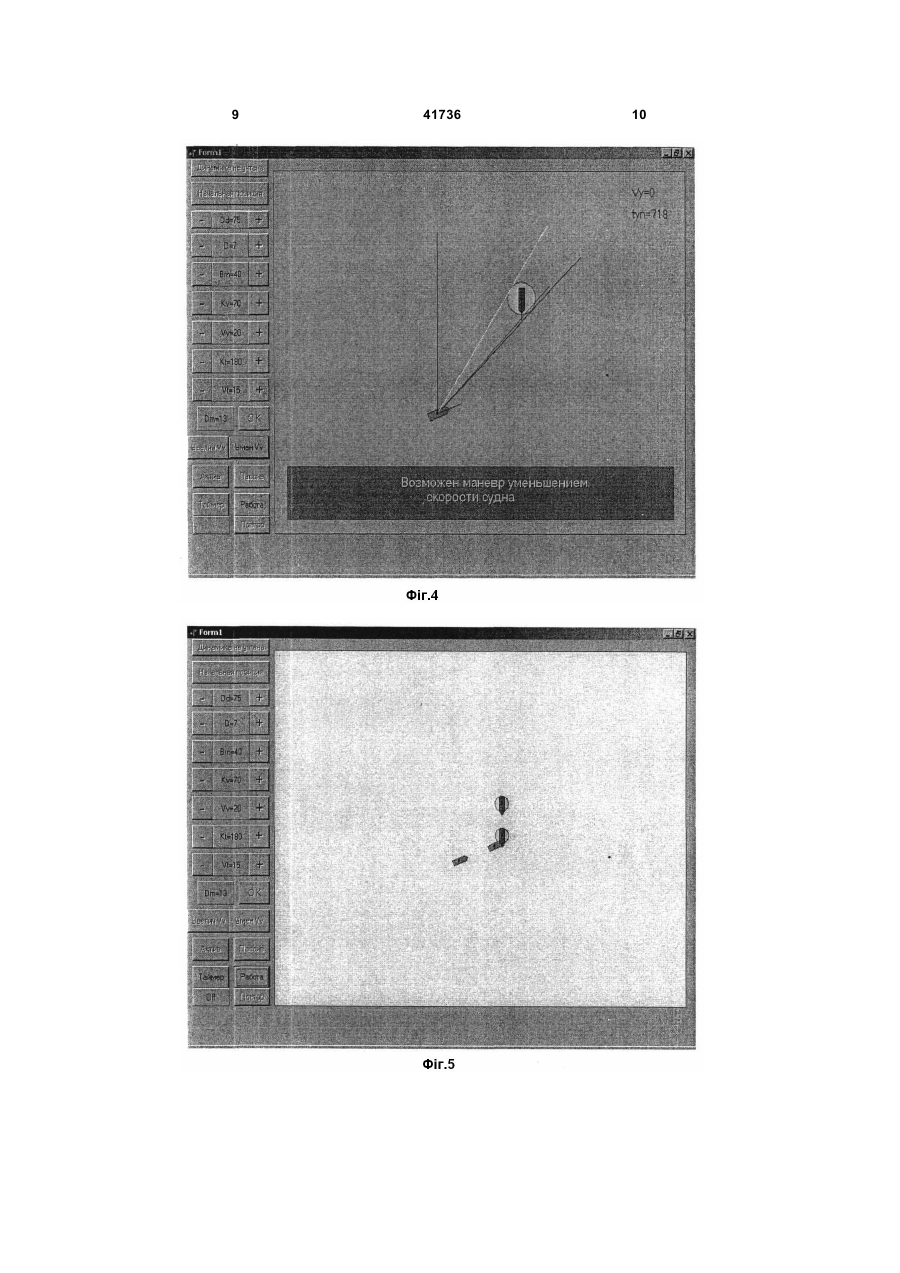
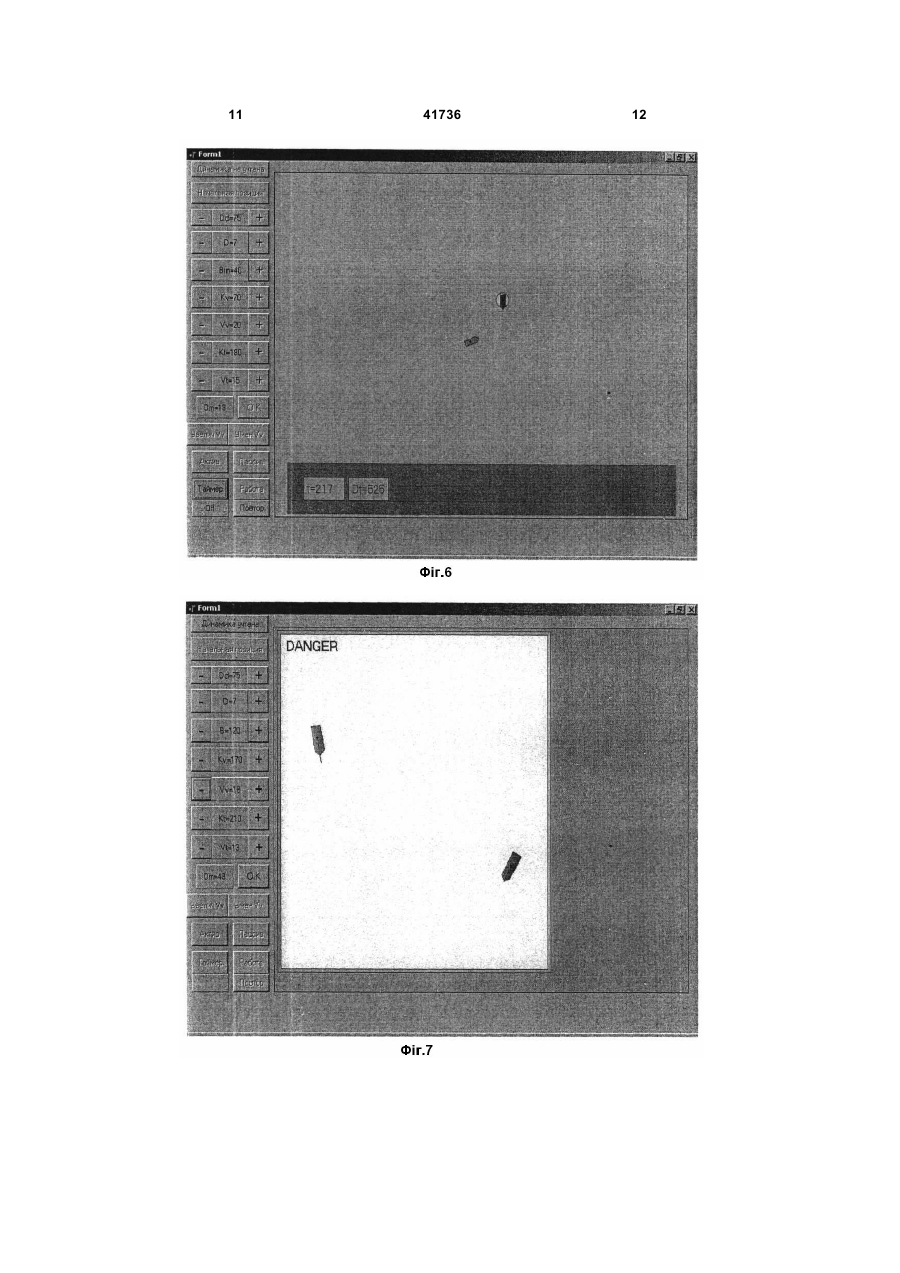
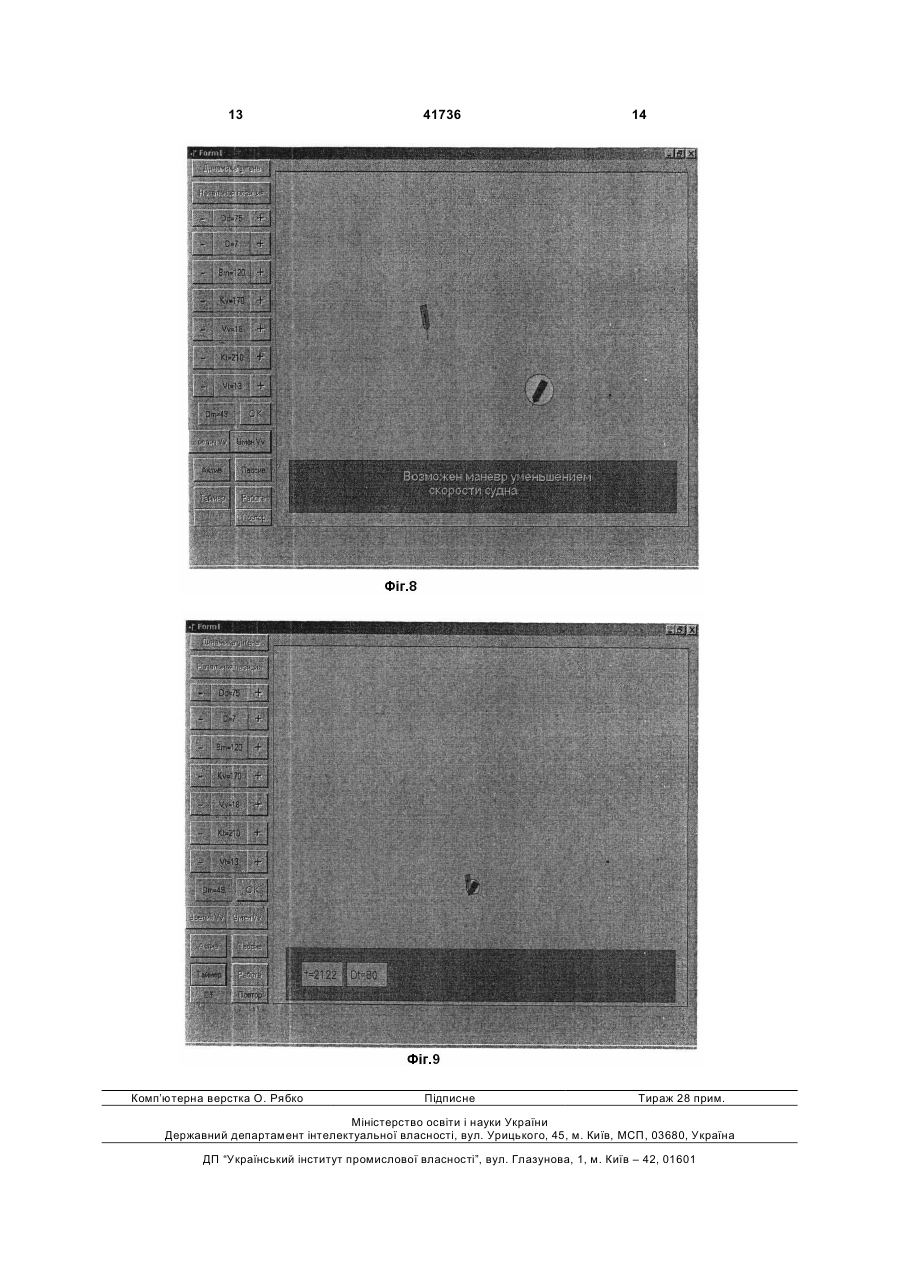
Спосіб оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна, що полягає у отриманні з радара даних істинного курсу Кіц і швидкості Vсц цілі, дистанції D до неї і істинного пеленга на ціль ІП і даних власного судна - істинного курсу Кіс, швидкості V0 і інерційних характеристик, за допо 3 мують значення швидкості руху судна Vy, за якою судно чисто розходиться з ціллю на заданій дистанції найкоротшого зближення маневром зміни швидкості. Причинно-наслідкові зв’язки: 1. Визначення швидкості ухилення Vy, - необхідно для попередження зіткнення суден з ціллю; 2. Визначення моменту tyn початку зміни швидкості від початкової V0 до Vy - дозволяє забезпечити значення дистанції найменшого зближення не менше ніж гранично-допустиме значення; 3. Визначення моменту завершення перехідного процесу tyk, коли досягається значення Vу необхідно для урахування інерційних характеристик судна; 4. Визначення моменту t початку перехідного процесу від швидкості Vу до V0 і - дає можливість мінімізувати втрати часу на розходження. Практична значущість корисної моделі полягає у тому, що запропонований спосіб може бути використаний для оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна, з ціллю підвищення безпеки судноводіння, а також для керування іншими рухомими об'єктами зміною їх швидкості. Опис корисної моделі При наявності загрози зіткнення суден або інших рухомих об'єктів необхідно зняти з радару дані цілі: дані істинного курсу Кіц, швидкість цілі Vcц, дистанцію D до неї і істинного пеленга на ціль ІП. Після чого беруть дані власного судна - істинного курсу Кіс, швидкості V0 і, враховуючи інерційні характеристики, визначають чотири параметри: швидкість ухилення Vy, момент tyn початку зміни швидкості від початкової V0 до Vy, момент завершення перехідного процесу tyk, коли досягається значення Vy, і момент tkn початку перехідного процесу від швидкості Vy до V0 і потім за отриманими даними за допомогою комп'ютерного обладнання здійснюють аналіз множини маневрів розходження суден (або інших рухомих об'єктів) зміною швидкості по критерію втрат ходового часу і отримують значення швидкості руху судна Vy, за якою судно чисто розходиться з ціллю на заданій дистанції найкоротшого зближення маневром зміни швидкості. Приклад розрахунку на комп'ютерній програмі Імітаційна модель містить у собі кілька модулів: - модуль вибору початкової небезпечної ситуації зближення; - модуль аналізу можливості виконувати маневр розходження збільшенням і зменшенням швидкості судна (причому в режимі активного і пасивного гальмування), з урахуванням і без урахування його інерційності; - модуль вибору існуючого маневру й розрахунок його параметрів; - модуль імітації обраного маневру з контролем основних параметрів. Вибір початкової ситуації робиться за допомогою клавіш «Динаміка врахована/не врахована», «Початкова позиція», клавіш зміни значень гранично-припустимої дистанції Dd, пеленга Вrn і диста 41736 4 нції D між суднами, курсу Kv і швидкості Vv судна й цілей Кс, Vc (Фіг.1). Підтвердження вибору початкової позиції робиться клавішею «ОК», поруч з якою знаходиться панель індикації дистанції найкоротшого зближення Dm . Для зручності при небезпечній початковій ситуації з'являється напис «DANGER». Обрана початкова позиція індицинується на моніторі (Фіг.2). Режим роботи без урахування динаміки судна показаний на Фіг.2. У цьому випадку після натискання клавіші «ОК» здійснюється аналіз можливості проведення трьох маневрів зміною швидкості й на моніторі з'являється зображення судна із граничними й екстремальними відносними курсами (Фіг.3). Також виводиться повідомлення результатів аналізу можливості маневрування зміною швидкості, а також активізуються відповідні клавіші «Збільш. Vv» і/або «Зменш. Vv». Після вибору маневру розходження треба «клікнути» відповідну клавішу («Збільш. Vv» і/або «Зменш. Vv») і на екрані індицинується значення параметрів маневру розходження (Фіг.4), швидкість відхилення Vy і момент початку маневру tyn. При цьому активується клавіша «Робота», при натисканні якої ілюструються початкові й кінцеві позиції судна й цілі в процесі маневру розходження, причому кінцева позиція демонструє момент найкоротшого зближення й відповідну дистанцію, що дорівнює дистанції найкоротшого зближення (Фіг.5). При цьому активізується клавіша «Таймер», що дозволяє програти маневр розходження. Клавіша «Таймер» вмикає й вимикає процес імітації маневру розходження. При увімкненому таймері (повідомлення «On» на панелі реєстрації стану) на моніторі відображається обрана початкова ситуація (Фіг.6), що у прискореному режимі імітує процес розходження із заданими параметрами розходження. У будь-який момент часу процес імітації можна призупинити, нажавши повторно клавішу «Таймер» (повідомлення «Off» на панелі). На монітор виводиться інформація про поточний час з початку процесу розходження й значення дистанції між судном і цілю, за допомогою якої можна переконатися, що дійсно в момент часу tyn дистанція між суднами Dt є мінімальною й дорівнює гранично-припустимому значенню Dd. Цим підтверджується коректність отриманої математичної моделі вибору оптимального маневру зміною швидкості судна. Якщо мінімальна й граничноприпустима дистанції не рівні, то є можливість виявити різницю й причини, що призвели до її появи. Процес імітації можна перервати вимиканням таймера, а після закінчення програвання маневру розходження суден таймер вимикається автоматично. Для вибору нової початкової позиції суден або для повторення існуючої призначена клавіша «Повтор» (Фіг.7). Для урахування інерційності судна в розрахунках параметрів маневру розходження необхідно верхню клавішу панелі керування перевести в положення «Динаміка врахована», як показано на Фіг.7. 5 У цьому випадку при аналізі можливості безпечного розходження зменшенням швидкості розглядається активне й пасивне гальмування, причому відбувається активізація відповідних клавіш. На Фіг.8 показано, що при зменшенні швидкості можливі маневри безпечного розходження як активним, так і пасивним гальмуванням. При цьому клавіші «Актив» і «Пасив», призначені для вибору маневрів розходження активним і пасивним гальмуванням активізовані. Вибір однієї із клавіш веде до розрахунку поправки часу за інерційність судна й урахування її в параметрах маневру розходження, що проявляється при імітації маневру (Фіг.9). При імітаційному моделюванні було програно більше двохсот (211) маневрів при різних небезпечних початкових ситуаціях, причому відбиралися тільки ті ситуації, для яких існував маневр розходження зміною швидкості судна. Початкова дистанція вибиралася від 5 до 7 миль при різних пеленгах близьких до початкового відносного курсу, швидкості суден від 15 до 25 вузлів, граничноприпустима дистанція найкоротшого зближення 0,75-1,0 милі. 41736 6 Аналіз імітаційного моделювання маневрів розходження дозволив одержати такі результати: - найефективнішим маневром є зниження швидкості судна активним гальмуванням, його реалізація була можлива у всіх ситуаціях, які моделюються; - маневр розходження пасивним гальмуванням виявився можливим тільки в десятій частині початкових ситуацій, які моделюються і у яких початкова дистанція найбільша, а швидкості судна й цілі невеликі; - рідше всього виявилася можливість реалізації маневру розходження збільшенням швидкості судна, вона склала приблизно шести відсотків розглянутих ситуацій, і виявилася можливою в ситуаціях великих початкових відстаней, низької швидкості цілі й відчутного запасу підвищення швидкості судна. Таким чином, імітаційним моделюванням підтверджена найбільша ефективність маневру розходження з використанням активного гальмування й достатня адекватність математичної моделі процесу розходження, що дозволяє коректно здійснити вибір параметрів маневру розходження. 7 41736 8 9 41736 10 11 41736 12 13 Комп’ютерна верстка О. Рябко 41736 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of optimum actions of vessel for avoidance of collision with dangerous objects in limited waters by speed change maneuver of vessel
Автори англійськоюTiupikov Yevhen Yevhenovych
Назва патенту російськоюСпособ оптимального расхождения судна с опасной целью в ограниченных водах маневром изменения скорости судна
Автори російськоюТюпиков Евгений Евгеньевич
МПК / Мітки
МПК: B63H 25/00
Мітки: ціллю, судна, водах, розходження, швидкості, спосіб, небезпечною, обмежених, оптимального, маневром, зміни
Код посилання
<a href="https://ua.patents.su/7-41736-sposib-optimalnogo-rozkhodzhennya-sudna-z-nebezpechnoyu-cillyu-v-obmezhenikh-vodakh-manevrom-zmini-shvidkosti-sudna.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимального розходження судна з небезпечною ціллю в обмежених водах маневром зміни швидкості судна</a>
Спосіб збільшення швидкості руху судна
Номер патенту: 40399
Опубліковано: 10.04.2009
Автори: Воронко Андрій Анатолійович, Тимофєєв Микола Іванович, Сорокопуд Іван Олександрович
МПК: B63C 7/00
Мітки: швидкості, судна, збільшення, руху, спосіб
Формула / Реферат:
Спосіб збільшення швидкості руху судна, що включає процеси з подолання опору вітрових навантажень і водного середовища, сили Архімеда, що виштовхує, сили тяжіння, бортових і кільових хитавиць, який відрізняється тим, що на силу тяги працюючого від судового двигуна гвинта додатково накладають силу тяги пароплана, прикладеного за допомогою троса і лебідки до кіля судна.
Спосіб визначення швидкості зміни температури при пожежі
Номер патенту: 81974
Опубліковано: 25.02.2008
Автори: Абрамов Юрій Олексійович, Садковий Володимир Петрович, Кривцова Валентина Іванівна
МПК: G08B 17/06
Мітки: швидкості, спосіб, пожежі, визначення, зміни, температури
Формула / Реферат:
Спосіб визначення швидкості зміни температури при пожежі, який полягає в тому, що вихідний сигнал теплового пожежного сповіщувача максимального типу піддають динамічній корекції з передавальною функцією диференціюючої ланки та вимірюють цей сигнал, який відрізняється тим, що вимірюють вихідний сигнал теплового пожежного сповіщувача максимального типу, потім вимірюють сигнал, що підданий динамічній корекції, та повторно вихідний сигнал...
Пристрій для виміру швидкості розходження звуку в рідині

Номер патенту: 14154
Опубліковано: 25.04.1997
Автор: Бабій Владлен Іванович
МПК: G01N 29/02, G01H 5/00
Мітки: пристрій, виміру, рідини, звуку, розходження, швидкості
Формула / Реферат:
Устройство для измерения скорости распространения звука в жидкости, содержащее обратимый электроакустический преобразователь, рабочая поверхность которого имеет форму поверхности тела вращения, а образованная этой поверхностью полость предназначена для исследуемой жидкости, и электронный измеритель скорости звука, электрически соединенный с обратимым электроакустическим преобразователем, отличающееся тем, что, с целью повышения...
Датчик швидкості зміни тиску
Номер патенту: 34775
Опубліковано: 26.08.2008
Автори: Панкратов Анатолій Іванович, Афанасьєва Анастасія Володимирівна
МПК: G01L 9/16
Мітки: датчик, швидкості, тиску, зміни
Формула / Реферат:
Датчик швидкості зміни тиску, що містить магнітопружний перетворювач тиску в електричну напругу, вимірювальна обмотка якого з'єднана з входом операційного підсилювача, який відрізняється тим, що обмотка збудження магнітопружного перетворювача підключена до стабілізованого джерела постійного струму.
Спосіб і пристрій для зміни швидкості передачі у каналах зв’язку
Номер патенту: 72802
Опубліковано: 15.04.2005
Автори: Тіедеманн Едвард Дж., молодший, Лін Ю-Чуан, Джоу Ю-Чеун
МПК: H04Q 7/38
Мітки: зв'язку, швидкості, пристрій, каналах, зміни, спосіб, передачі
Формула / Реферат:
1. Спосіб контролю доступу до системи, який включає операції:- прийому показника навантаження, який відображає поточне використання системи відносно верхньої границі, - підвищення встановленого значення швидкості передачі, яке використовується для регулювання доступу до зазначеної системи, якщо зазначений показник навантаження є нижчим за припустиме граничне значення, і- зниження зазначеного встановленого значення...
Попередній патент: Спосіб прогнозування розвитку недостатності лютеїнової фази менструального циклу та ановуляції у віл-інфікованих жінок репродуктивного віку
Наступний патент: Конвеєрні ваги
Випадковий патент: Обмежувач вібрацій газотурбінного двигуна