Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем
Формула / Реферат
1. Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:
вимірюванні значення енергії у смузі частот,
вимірюванні енергії пілот-каналу,
перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії.
відніманні зазначеного значення неперешкоджаючої енергії від зазначеного значення енергії у смузі для одержання значення перешкоджаючого шуму,
вимірюванні енергії біта прийнятого сигналу,
обчисленні відношення сигнал/шум відповідно до зазначеного значення перешкоджаючого шуму і зазначеної енергії біта, і
формуванні команди керування потужністю відповідно до зазначеного відношення сигнал/шум.
2. Спосіб за п. 1, який додатково містить порівняння зазначеного відношення сигнал/шум із заздалегідь визначеним пороговим значенням.
3. Спосіб за п. 1, який додатково містить прийом зазначеного значення пілотної складової від віддаленого засобу зв'язку.
4. Спосіб за п. 1, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає:
вимірювання значення енергії символу, і
перерахунок зазначеного значення енергії символу відповідно до значення швидкості передачі даних.
5. Спосіб за п. 4, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає визначення зазначеного значення швидкості передачі даних.
6. Спосіб за п. 4, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає прийом зазначеного значення швидкості передачі даних від віддаленого засобу зв'язку.
7. Спосіб керування потужністю у замкненій системі керування потужністю системи режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в:
накопиченні зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N),
обчисленні значення шуму для зазначеного демодульованого сигналу відповідно до зазначених накопичених зразків,
вимірюванні енергії біта зазначеного демодульованого сигналу,
обчисленні відношення сигнал/шум для зазначеного демодульованого сигналу відповідно до зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і
формуванні команди керування потужністю відповідно до відношення сигнал/шум,
який відрізняється тим, що обчислення значення шуму для зазначеного демодульованого сигналу включає:
складання квадратів амплітуд зазначених накопичених символів для одержання сумарного значення енергії,
складання амплітуд зазначених накопичених символів,
піднесення до квадрата зазначеної суми зазначених амплітуд символів,
ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і
віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму.
8. Спосіб за п. 7, який додатково містить об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового демодульованого сигналу.
9. Спосіб за п. 7, який відрізняється тим, що енергію біта вимірюють відповідно до визначеного значення енергії інформаційних символів.
10. Спосіб за п. 7, який відрізняється тим, що N = 24.
11. Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає:
засіб для вимірювання значення енергії у смузі частот,
засіб для вимірювання енергії пілот-каналу,
засіб для перерахунку зазначеної енергії пілот-каналу відповідно до значення пілотної складової для одержання значення неперешкоджаючої енергії,
засіб для віднімання зазначеного значення неперешкоджаючої енергії від зазначеного значення енергії у смузі для одержання значення перешкоджаючого шуму засіб для вимірювання енергії біта прийнятого сигналу,
засіб для обчислення відношення сигнал/шум відповідно до зазначеного значення перешкоджаючого шуму і зазначеної енергії біта, і
засіб для формування команди керування потужністю відповідно до зазначеного відношення сигнал/шум.
12. Система за п. 11, яка додатково включає засіб для порівняння зазначеного відношення сигнал/шум із заздалегідь визначеним пороговим значенням.
13. Система за п. 11, яка додатково включає засіб для прийому зазначеного значення пілотної складової від віддаленого засобу зв'язку.
14. Система за п. 11, яка відрізняється тим, що зазначений засіб для обчислення зазначеної енергії біта включає:
засіб для вимірювання значення енергії символу, і
засіб для перерахунку зазначеного значення енергії символу відповідно до значення швидкості передачі даних.
15. Система за п. 14, яка відрізняється тим, що зазначений засіб для вимірювання зазначеної енергії біта включає засіб для визначення зазначеного значення швидкості передачі даних.
16. Система за п. 14, яка відрізняється тим, що зазначений засіб для вимірювання зазначеної енергії біта включає засіб для прийому зазначеного значення швидкості передачі даних від віддаленого засобу зв'язку.
17. Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає:
засіб для накопичення зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N),
засіб для обчислення значення шуму для зазначеного демодульованого сигналу відповідно до зазначених накопичених зразків,
засіб для вимірювання енергії біта для зазначеного демодульованого сигналу,
засіб для обчислення відношення сигнал/шум для зазначеного демодульованого сигналу відповідно до зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і
засіб для формування команди керування потужністю відповідно до відношення сигнал/шум,
яка відрізняється тим, що зазначений засіб для обчислення значення шуму для зазначеного демодульованого сигналу включає:
засіб для складання квадратів амплітуд зазначених накопичених символів для одержання значення сумарної енергії,
засіб для складання амплітуд зазначених накопичених символів,
засіб для піднесення до квадрата зазначеної суми зазначених амплітуд символів,
засіб для ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і
засіб для віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму.
18. Система за п. 17, яка додатково включає засіб для об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового демодульованого сигналу.
19. Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає:
засіб для накопичення зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N),
засіб для обчислення значення шуму для зазначеного демодульованого сигналу відповідно до зазначених накопичених зразків,
засіб для вимірювання енергії біта для зазначеного демодульованого сигналу, засіб для обчислення відношення сигнал/шум для зазначеного демодульованого
сигналу відповідно до зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і
засіб для формування команди керування потужністю відповідно до відношення сигнал/шум,
яка відрізняється тим, що зазначений засіб для обчислення значення шуму для зазначеного демодульованого сигналу включає:
засіб для складання квадратів амплітуд зазначених накопичених символів для одержання значення сумарної енергії,
засіб для складання амплітуд зазначених накопичених символів, засіб для піднесення до квадрата зазначеної суми зазначених амплітуд символів,
засіб для ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і
засіб для віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму.
20. Система за п. 19, яка додатково включає засіб для об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового. демодульованого сигналу.
Текст
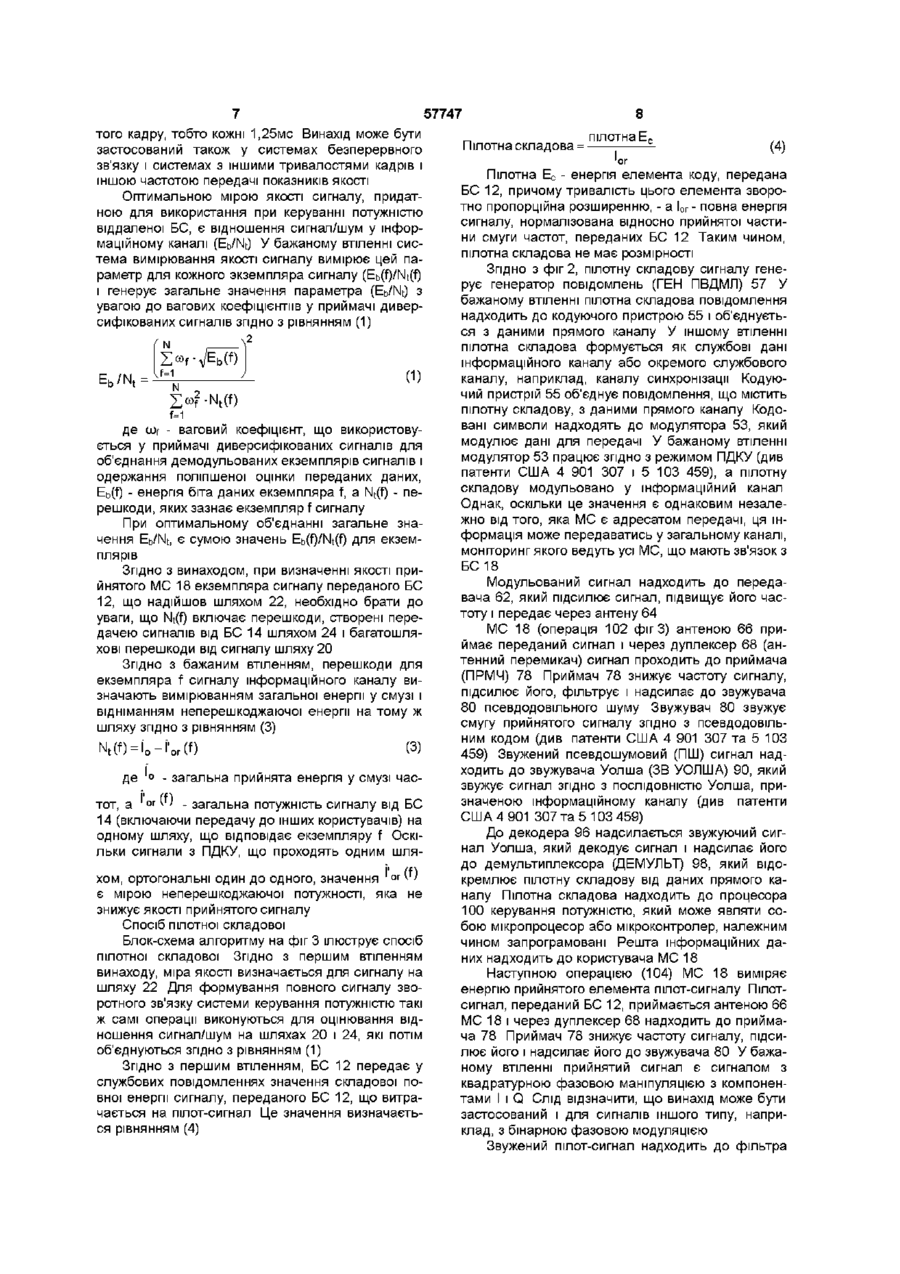
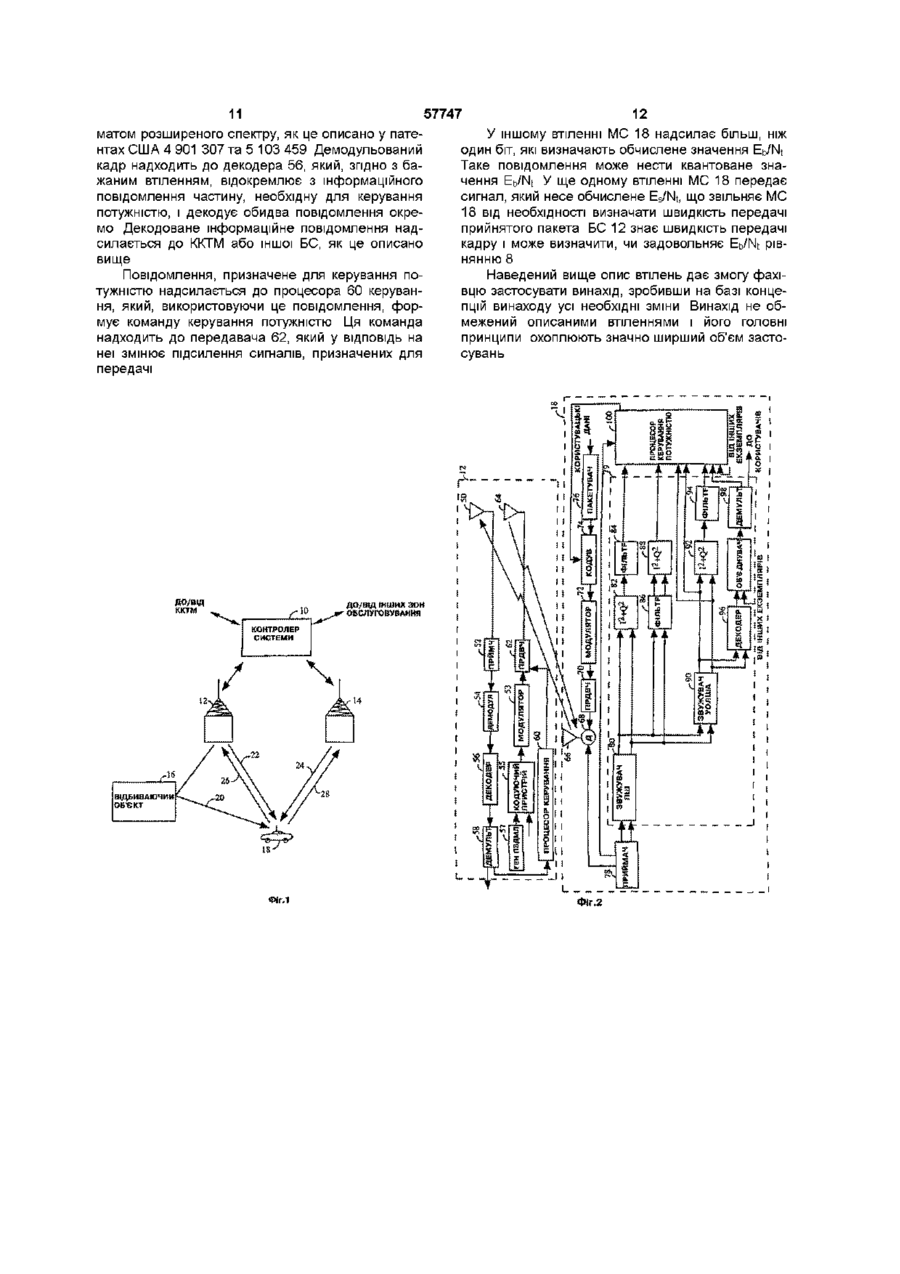
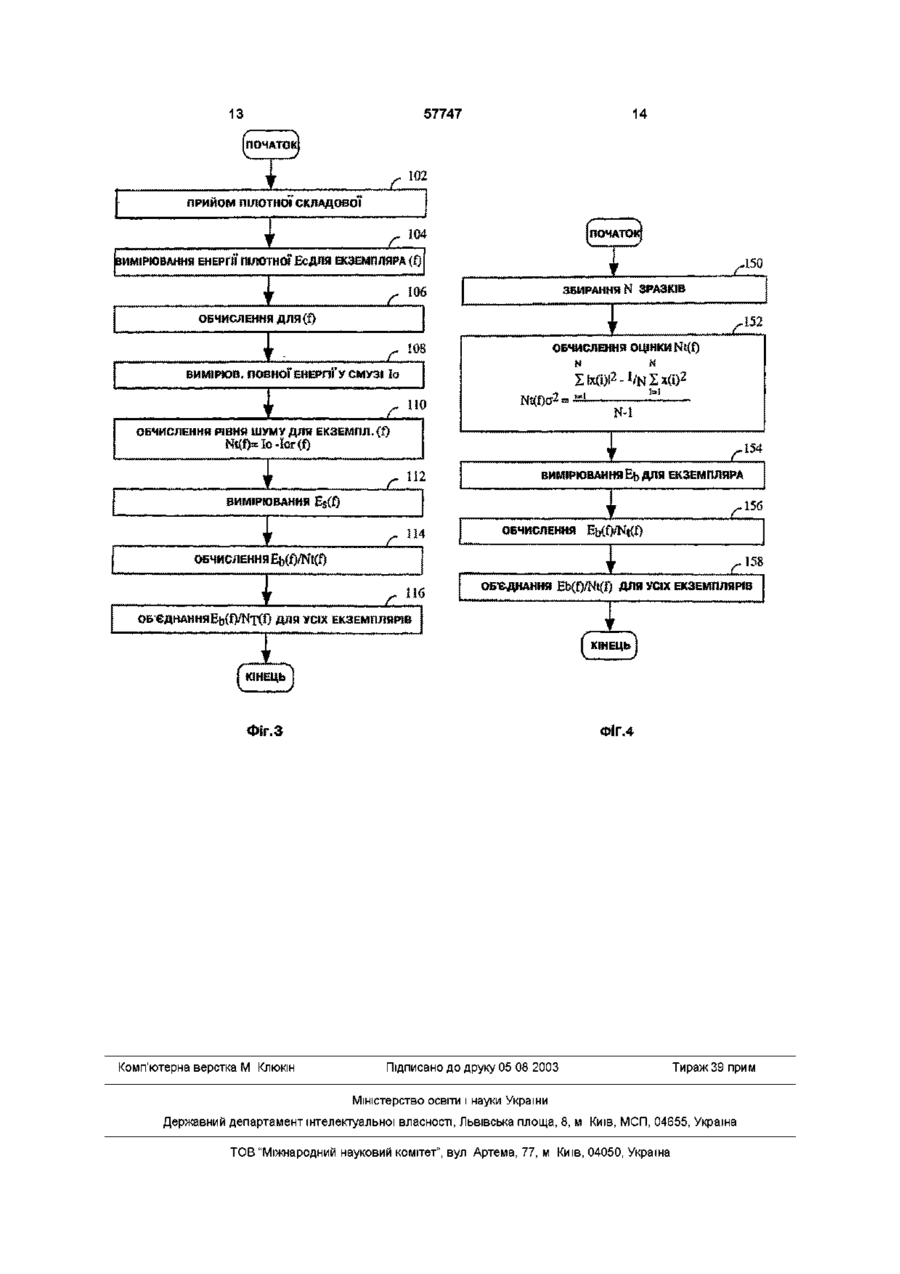
1 Спосіб керування потужністю в замкненій системі керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в вимірюванні значення енергії у смузі частот, вимірюванні енергії пілот-каналу, перерахунку зазначеної енергії пілот-каналу ВІДПОВІДНО до значення пілотної складової для одержання значення неперешкоджаючої енергії відніманні зазначеного значення неперешкоджаючої енергії від зазначеного значення енергії у смузі для одержання значення перешкоджаючого шуму, вимірюванні енергії біта прийнятого сигналу, обчисленні відношення сигнал/шум ВІДПОВІДНО до зазначеного значення перешкоджаючого шуму і зазначеної енергії біта, і формуванні команди керування потужністю ВІДПОВІДНО до зазначеного відношення сигнал/шум 2 Спосіб за п 1, який додатково містить порівняння зазначеного відношення сигнал/шум із заздалегідь визначеним пороговим значенням 3 Спосіб за п 1, який додатково містить прийом зазначеного значення пілотної складової від віддаленого засобу зв'язку 4 Спосіб за п 1, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає вимірювання значення енергії символу, і перерахунок зазначеного значення енергії символу ВІДПОВІДНО до значення швидкості передачі даних 5 Спосіб за п 4, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає визначення зазначеного значення швидкості передачі даних 6 Спосіб за п 4, який відрізняється тим, що зазначене вимірювання зазначеної енергії біта включає прийом зазначеного значення швидкості передачі даних від віддаленого засобу зв'язку 7 Спосіб керування потужністю у замкненій системі керування потужністю системи режимом паралельного доступу з кодовим розподілом каналів (ПДКР), який полягає в накопиченні зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N), обчисленні значення шуму для зазначеного демодульованого сигналу ВІДПОВІДНО до зазначених накопичених зразків, вимірюванні енергії біта зазначеного демодульованого сигналу, обчисленні відношення сигнал/шум для зазначеного демодульованого сигналу ВІДПОВІДНО ДО зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і формуванні команди керування потужністю О ВІДПОВІДНО до відношення сигнал/шум, який відрізняється тим, що обчислення значення шуму для зазначеного демодульованого сигналу включає складання квадратів амплітуд зазначених накопичених символів для одержання сумарного значення енергії, складання амплітуд зазначених накопичених символів, піднесення до квадрата зазначеної суми зазначених амплітуд символів, ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму 8 Спосіб за п 7, який додатково містить об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового демодульованого сигналу і ю 57747 9 Спосіб за п 7, який відрізняється тим, що енергію біта вимірюють ВІДПОВІДНО до визначеного значення енергії інформаційних символів 10 Спосіб за п 7, який відрізняється тим, що N = 24 11 Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає засіб для вимірювання значення енергії у смузі частот, засіб для вимірювання енергії пілот-каналу, засіб для перерахунку зазначеної енергії пілотканалу ВІДПОВІДНО ДО значення пілотної складової для одержання значення неперешкоджаючої енергії, засіб для віднімання зазначеного значення неперешкоджаючої енергії від зазначеного значення енергії у смузі для одержання значення перешкоджаючого шуму засіб для вимірювання енергії біта прийнятого сигналу, засіб для обчислення відношення сигнал/шум ВІДПОВІДНО до зазначеного значення перешкоджаючого шуму і зазначеної енергії біта, і засіб для формування команди керування потужністю ВІДПОВІДНО до зазначеного відношення сигнал/шум 12 Система за п 11, яка додатково включає засіб для порівняння зазначеного відношення сигнал/шум із заздалегідь визначеним пороговим значенням 13 Система за п 11, яка додатково включає засіб для прийому зазначеного значення пілотної складової від віддаленого засобу зв'язку 14 Система за п 11, яка відрізняється тим, що зазначений засіб для обчислення зазначеної енергії біта включає засіб для вимірювання значення енергії символу, і засіб для перерахунку зазначеного значення енергії символу ВІДПОВІДНО до значення швидкості передачі даних 15 Система за п 14, яка відрізняється тим, що зазначений засіб для вимірювання зазначеної енергії біта включає засіб для визначення зазначеного значення швидкості передачі даних 16 Система за п 14, яка відрізняється тим, що зазначений засіб для вимірювання зазначеної енергії біта включає засіб для прийому зазначеного значення швидкості передачі даних від віддаленого засобу зв'язку 17 Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає засіб для накопичення зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N), засіб для обчислення значення шуму для зазначеного демодульованого сигналу ВІДПОВІДНО ДО зазначених накопичених зразків, засіб для вимірювання енергії біта для зазначеного демодульованого сигналу, засіб для обчислення відношення сигнал/шум для зазначеного демодульованого сигналу ВІДПОВІДНО до зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і засіб для формування команди керування потужністю ВІДПОВІДНО до відношення сигнал/шум, яка відрізняється тим, що зазначений засіб для обчислення значення шуму для зазначеного демодульованого сигналу включає засіб для складання квадратів амплітуд зазначених накопичених символів для одержання значення сумарної енергії, засіб для складання амплітуд зазначених накопичених символів, засіб для піднесення до квадрата зазначеної суми зазначених амплітуд символів, засіб для ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і засіб для віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму 18 Система за п 17, яка додатково включає засіб для об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового демодульованого сигналу 19 Замкнена система керування потужністю системи зв'язку з режимом паралельного доступу з кодовим розподілом каналів (ПДКР), яка включає засіб для накопичення зразків демодульованого сигналу з заздалегідь визначеним цілим числом (N), засіб для обчислення значення шуму для зазначеного демодульованого сигналу ВІДПОВІДНО ДО зазначених накопичених зразків, засіб для вимірювання енергії біта для зазначеного демодульованого сигналу, засіб для обчислення відношення сигнал/шум для зазначеного демодульованого сигналу ВІДПОВІДНО до зазначеного значення шуму і зазначеної енергії біта для зазначеного демодульованого сигналу, і засіб для формування команди керування потужністю ВІДПОВІДНО до відношення сигнал/шум, яка відрізняється тим, що зазначений засіб для обчислення значення шуму для зазначеного демодульованого сигналу включає засіб для складання квадратів амплітуд зазначених накопичених символів для одержання значення сумарної енергії, засіб для складання амплітуд зазначених накопичених символів, засіб для піднесення до квадрата зазначеної суми зазначених амплітуд символів, засіб для ділення квадрата зазначеної суми зазначених амплітуд символів на N для одержання нормалізованого значення квадрата, і засіб для віднімання зазначеного нормалізованого значення квадрата від зазначеного значення сумарної енергії і ділення результату на (N-1) для одержання зазначеного значення шуму 20 Система за п 19, яка додатково включає засіб для об'єднання щонайменше одного додаткового відношення сигнал/шум для щонайменше одного додаткового демодульованого сигналу 57747 Винахід стосується систем зв'язку, зокрема, нового поліпшеного способу і пристрою для керування потужністю у прямому каналі мобільної системи зв'язку Модуляція з використанням режиму паралельного доступу з кодовим ущільненням каналів (ПДКУ) є одним з способів забезпечення зв'язку у системах з великою КІЛЬКІСТЮ користувачів ВІДОМІ ІНШІ способи, такі, як, наприклад, паралельний доступ з розділенням часу (ПДРЧ) і паралельний доступ з розподілом частот (ПДРЧС), але ПДКУ має суттєві переваги над ними Використання систем паралельного доступу з ПДКУ описано у патентах США 4 901 307 та 5 103 459, включених сюди посиланням Зв'язок з використанням ПДКУ дозволяє паралельне багаторазове використання однієї смуги частот і забезпечує розподіл енергії сигналу по усій смузі Тому затухання на певній частоті впливає тільки на незначну частину смуги частот сигналу Просторова або шляхова диверсифікація забезпечується створенням багатьох шляхів для сигналу, тобто каналів зв'язку від мобільного користувача (далі - МК) або мобільної станції (далі МС) через дві або більше зон обслуговування Диверсифікацію шляхів можна створити також, використовуючи багатошляховість довкілля і окремо обробляючи сигнали розширеного спектру, які надходять з різними затримками, зумовленими особливостями їх шляху Приклади цього можна знайти у патентах США 5 101 501 і 5 109 390, включених сюди посиланням Кодування мови з змінною швидкістю є способом передачі мови у цифрових системах зв'язку, який забезпечує підвищення інформаційної здатності, зберігаючи високу якість прийому мови Спосіб кодування з змінною швидкістю і ВІДПОВІДНИЙ пристрій описано у патенті США 5 414 796, включеному сюди посиланням У системі керування потужністю і передачі МС зручно підраховувати на МС КІЛЬКІСТЬ кадрів, прийнятих з помилкою Якщо у лічильнику таких кадрів перевищено поріг, МС надсилає повідомлення до базової станції Лічильник періодично встановлюється у 0 Спосіб і пристрій керування потужністю у такий спосіб описано у патенті США 5 056 109, включеному сюди посиланням Спосіб більш швидкого керування потужністю описано у заявці 08/374 444 на патент США від 29 03 1996, включеній сюди посиланням Згідно з цим способом у кожному кадрі МС надсилає у зворотному каналі зв'язку до БС біт, який вказує на якість попереднього кадру прямого каналу Значення 0 у цьому біті означає, що цей кадр був прийнятий без помилок, значення 1 вказує на помилку Оскільки ЦІ біти закодовано і встановлено порядок їх зчитування, вони приймаються без помилок Завдяки наявності показника якості кадру МС може ігнорувати біти керування потужністю, які вірогідно є помилковими Ці способи керування потужністю, однак, обмежені тим, що у зворотному каналі передається щонайбільше один значущий біт інформації на прийнятий кадр Умови затухання можуть вимага ти значно більш швидкої передачі зворотної інформації Задачею винаходу є створення нового, поліпшеного способу побудови міри якості прийнятого сигналу, оптимально пристосованої для керування потужністю передавача у замкненій системі регулювання Винахід описано стосовно систем зв'язку з розширеним спектром, але він може бути застосований і у системах зв'язку інших типів Згідно з винаходом, систему керування потужністю описано як керуючу потужністю передачі від БС до МС, тобто у прямому каналі Винахід, однак, можна використати у системах керування потужністю у зворотному каналі, тобто від МС до БС У подальшому описі більш докладно наведено особливості, задачі і переваги винаходу з посиланнями на супроводжуючі креслення, де фіг 1 ілюструє використання винаходу у мобільній телефонній системі, фіг 2 містить блок-схему системи керування потужністю згідно з винаходом, фіг 3 містить схему алгоритма визначення міри якості згідно з першим втіленням винаходу і фіг 4 містить схему алгоритма визначення міри якості згідно з другим втіленням винаходу Згідно З фіг1, контролер 10 системи приймає дані від комунальної комутаційної телефонної мережі (ККТМ) (не показана) і надсилає їх до неї БС 12, 14 обмінюються даними з контролером 10 системи БС передає дані до МС 18 у прямому каналі шляхами 20, 22 Шлях 22 - прямий від БС 12 до МС 18, шлях 20 - це шлях з відбиттям від об'єкта 16, який є частиною довкілля, найчастіше будинком або іншою спорудою У бажаному втіленні МС 18 окремо демодулює сигнали, що прийшли шляхами 20, 22, і об'єднує демодульовані сигнали Устрій і використання приймачів, здатних об'єднувати сигнали, що прийшли різними шляхами, описано у згаданому вище патенті США 5 109390 Крім того, БС 14 передає дані, які проходять шляхом 24 і призначені або не призначені для МС 18 Якщо МС 18 знаходиться поблизу межі між зонами обслуговування БС 12 і 14, вона може бути переведена у стан м'якої передачі зв'язку, і у цьому випадку БС 12, 14 передаватимуть їй дубльовані сигнали, які будуть окремо демодульовані і потім об'єднані М'яку передачу зв'язку описано у згаданому вище патенті США 5 101 501 Якщо сигнали, які передає БС 14 не призначені для МС 18, то, згідно з бажаним втіленням, ця МС сприйматиме їх як шум у робочій смузі частот Якість передачі до МС 18 визначається як сила сигналів, що надійшли до неї шляхами 20, 22 і шляхом 24, якщо МС знаходиться у стані м'якої передачі зв'язку Засновуючись на цьому, МС 18 передає шляхом 26 назад до БС 12 сигнал, що вказує на якість прийнятих сигналів Якщо МС 18 знаходиться у стані м'якої передачі зв'язку, цей сигнал буде також прийнятий БС 14 У бажаному втіленні дані передаються кадрами тривалістю 20 мс, а показники якості прийнятих кадрів надсилаються 16 разів для кожного прийня 57747 того кадру, тобто кожні 1,25мс Винахід може бути застосований також у системах безперервного зв'язку і системах з іншими тривалостями кадрів і іншою частотою передачі показників якості Оптимальною мірою якості сигналу, придатною для використання при керуванні потужністю віддаленої БС, є відношення сигнал/шум у інформаційному каналі (Еь/Nt) У бажаному втіленні система вимірювання якості сигналу вимірює цей параметр для кожного экземпляра сигналу (Eb(f)/Nt(f) і генерує загальне значення параметра (Еь/Nt) з увагою до вагових коефіцієнтмв у приймачі диверсифікованих сигналів згідно з рівнянням (1) ,2 E b /N t = N 7 (1) •Nt(f) f=1 - ваговий коефіцієнт, що використовуде ється у приймачі диверсифікованих сигналів для об'єднання демодульованих екземплярів сигналів і одержання поліпшеної оцінки переданих даних, Eb(f) - енергія біта даних екземпляра f, a Nt(f) - перешкоди, яких зазнає екземпляр f сигналу При оптимальному об'єднанні загальне значення Еь/Nt, є сумою значень Eb(f)/Nt(f) для екземплярів Згідно З винаходом, при визначенні якості прийнятого МС 18 екземпляра сигналу переданого БС 12, що надійшов шляхом 22, необхідно брати до уваги, що Nt(f) включає перешкоди, створені передачею сигналів від БС 14 шляхом 24 і багатошляхові перешкоди від сигналу шляху 20 Згідно З бажаним втіленням, перешкоди для екземпляра f сигналу інформаційного каналу визначають вимірюванням загальної енергії у смузі і відніманням неперешкоджаючої енергії на тому ж шляху згідно з рівнянням (3) де ° - загальна прийнята енергія у смузі частот, a o r t ^ - загальна потужність сигналу від БС 14 (включаючи передачу до інших користувачів) на одному шляху, що відповідає екземпляру f Оскільки сигнали з ПДКУ, що проходять одним шляхом, ортогональні один до одного, значення o r t ^ є мірою неперешкоджаючої потужності, яка не знижує якості прийнятого сигналу Спосіб пілотної складової Блок-схема алгоритму на фіг 3 ілюструє спосіб пілотної складової Згідно з першим втіленням винаходу, міра якості визначається для сигналу на шляху 22 Для формування повного сигналу зворотного зв'язку системи керування потужністю такі ж самі операції виконуються для оцінювання відношення сигнал/шум на шляхах 20 і 24, які потім об'єднуються згідно з рівнянням (1) Згідно З першим втіленням, БС 12 передає у службових повідомленнях значення складової повної енергії сигналу, переданого БС 12, що витрачається на пілот-сигнал Це значення визначається рівнянням (4) 8 Пілотна складова = пілотна Е с (4) Пілотна Ес - енергія елемента коду, передана БС 12, причому тривалість цього елемента зворотно пропорційна розширенню, - а Іог - повна енергія сигналу, нормалізована відносно прийнятої частини смуги частот, переданих БС 12 Таким чином, пілотна складова не має розмірності Згідно З фіг 2, пілотну складову сигналу генерує генератор повідомлень (ГЕН ПВДМЛ) 57 У бажаному втіленні пілотна складова повідомлення надходить до кодуючого пристрою 55 і об'єднується з даними прямого каналу У іншому втіленні пілотна складова формується як службові дані інформаційного каналу або окремого службового каналу, наприклад, каналу синхронізації Кодуючий пристрій 55 об'єднує повідомлення, що містить пілотну складову, з даними прямого каналу Кодовані символи надходять до модулятора 53, який модулює дані для передачі У бажаному втіленні модулятор 53 працює згідно з режимом ПДКУ (див патенти США 4 901 307 і 5 103 459), а пілотну складову модульовано у інформаційний канал Однак, оскільки це значення є однаковим незалежно від того, яка МС є адресатом передачі, ця інформація може передаватись у загальному каналі, моніторинг якого ведуть усі МС, що мають зв'язок з БС18 Модульований сигнал надходить до передавача 62, який підсилює сигнал, підвищує його частоту і передає через антену 64 МС 18 (операція 102 фігЗ) антеною 66 приймає переданий сигнал і через дуплексер 68 (антенний перемикач) сигнал проходить до приймача (ПРМЧ) 78 Приймач 78 знижує частоту сигналу, підсилює його, фільтрує і надсилає до звужувача 80 псевдодовільного шуму Звужувач 80 звужує смугу прийнятого сигналу згідно з псевдодовільним кодом (див патенти США 4 901 307 та 5 103 459) Звужений псевдошумовий (ПШ) сигнал надходить до звужувача Уолша (ЗВ УОЛША) 90, який звужує сигнал згідно з ПОСЛІДОВНІСТЮ Уолша, призначеною інформаційному каналу (див патенти США 4 901 307 та 5 103 459) До декодера 96 надсилається звужуючий сигнал Уолша, який декодує сигнал і надсилає його до демультиплексора (ДЕМУЛЬТ) 98, який відокремлює пілотну складову від даних прямого каналу Пілотна складова надходить до процесора 100 керування потужністю, який може являти собою мікропроцесор або мікроконтролер, належним чином запрограмовані Решта інформаційних даних надходить до користувача МС 18 Наступною операцією (104) МС 18 виміряє енергію прийнятого елемента пілот-сигналу Пілотсигнал, переданий БС 12, приймається антеною 66 МС 18 і через дуплексер 68 надходить до приймача 78 Приймач 78 знижує частоту сигналу, підсилює його і надсилає його до звужувача 80 У бажаному втіленні прийнятий сигнал є сигналом з квадратурною фазовою маніпуляцією з компонентами І і Q Слід відзначити, що винахід може бути застосований і для сигналів іншого типу, наприклад, з бінарною фазовою модуляцією Звужений пілот-сигнал надходить до фільтра 57747 86, який видаляє з сигналу шуми Фільтровані символи надходять до квадратора 88, який підносить до квадрату і складає амплітуди сигналів І-каналу і Q-каналу Ці значення дають оцінку енергії елемента у пілот-каналі (пілотна Ес) для процесора 100 керування потужністю Процесор 100 обчислює оцінку повної неперешкоджаючої енергії r o r (f), що надходить шляхом екземпляру f, за формулою (5) l'or(f) - (пілотна складова) 1 х пілотна Е с (5) Приймач 78 (операція 108) виміряє енергію у смузі і надсилає результат до процесора 100 керування Варто відзначити, що, оскільки приймач 78 звичайно має у складі підсилювач з АРП (не показаний), вимірювання енергії у смузі є побічною операцією Операцією 110 процесор 100 обчислює значення Nt(f) перешкод, яких зазнає екземпляр шляху f згідно з рівнянням (6) Nt(f) = Іо - l'or(f) (6) Спосіб коливань пілот-сигналу Згідно З другим втіленням винаходу до МС 18 не надсилається пілотна складова МС 18 оцінює незаважаючий шум Nt(f) компілюванням інформації про коливання енергії прийнятого пілот-сигналу Операцією 152 процесор 100 керуванням потужністю оцінює шум для екземпляра f Взагалі оцінка Nt(f) здійснюється моніторингом потоку символів пілот-сигналу Один з способів оцінювання Nt(f), показаний на фіг 2, полягає в обчисленні квадратів (82, 88) і фільтруванні (84, 86) У бажаному втіленні фільтри 84, 86 є простими усереднюючими фільтрами, a Nt(f) обчислюється згідно з рівнянням (7) N 1=1 N 1=1 N-1 де N - КІЛЬКІСТЬ зразків, зібраних для статистики У бажаному втіленні N = 24, X, - це синфазний компонент амплітуди символів XQ - це квадратурний компонент амплітуди символів Після обчислення шуму у інформаційному каналі (операція 112) МС 18 виміряє енергію символу принятого потоку символів Звужений сигнал від звужувача 80 надходить до звужувача 90 Уолша, який звужує прийняті сигнали інформаційного каналу згідно з ПОСЛІДОВНІСТЮ Уолша, призначеною цьому каналу (див патенти США 4 901 307 та 5 103 459) N t (f) = 1=1 Звужений сигнал після цього надходить до квадраторів 92 Як уже відзначалось, у бажаному втіленні прийнятий сигнал є сигналом з квадратурною фазовою маніпуляцією з компонентами І і Q, хоча слід відзначити, що винахід може бути застосований і для сигналів з модуляцією іншого типу Квадратор 88 підносить до квадрату і складає амплітуди сигналів І-каналу і Q-каналу і надсилає результат до фільтру 94 Фільтр 94 видаляє шум з оцінки енергії символа інформаційного каналу (Es) і спрямовує результат до процесора 100 керування потужністю Процесор 100 перетворює оцінку енергії символа інформаційного каналу (Es) у оцінку енергії біта (Еь) за формулою (8) Е ь = E s х Rs/Rb (8) 10 де Rs - швидкість передачі символів сигналів, a Rb - швидкість передачі бітів сигналу Це обчислення вносить додаткове ускладнення у системи з змінною швидкістю передачі, оскільки МС 18 не знає заздалегідь значення Rb переданого сигналу Одним з шляхів вирішення цієї проблеми є обчислення для МС 18 процесором 100 швидкості Rb передачі бітів з використанням оцінки швидкості для поточного кадру, одержаної на основі статистики і передісторії прийнятих кадрів Згідно з бажаним втіленням вважається, що поточний кадр ідентичний попередньому Згідно З стандартом TIA/EIA IS-95 Асоціації Зв'язку, що визначає умови сумісності БС стільникових систем розширеного спектру, потужність передачі у прямому каналі змінюється пропорційно швидкості У другому втіленні процесор 100 керування потужністю оцінює швидкість передачі для сигналу, використовуючи енергію E s прийнятого інформаційного символа У поліпшеному втіленні процесор 100 використовує відношення E s до енергії Е с елемента пілот-сигналу для оцінювання швидкості передачі, що дозволяє уникнути хибних оцінок швидкості, породжених зміною шляхів розповсюдження і затуханням, оскільки енергія пілотсигналу знижується з такою ж швидкістю, як і у інформаційному каналі Операцією 114 процесор 100 керування потужністю обчислює значення Eb(f)/Nt(f) для шляху f розповсюдження, а також для інших шляхів Значення для окремих шляхових екземплярів сигналу потім складаються з використанням вагових коефіцієнтів процесором 100 (операція 116) У бажаному втіленні процесор 100 порівнює обчислене значення Еь/Nt з пороговим і створює один біт, який вказує, перевищує Еь/Nt поріг чи ні Користувацькі дані кадрами надходять до пакетувача 76, який, згідно з бажаним втіленням, генерує і додає біти контроля циклічним кодом, а також додає хвостові біти, як це детально описано у патентах США 4 901 307 та 5 414 796 Пакетовані дані надходять до кодуючого пристрою 74, який кодує пакет з згорткою У бажаному втіленні біт керування потужністю кодується кодуючим пристроєм 74 і додається до закодованого пакету У іншому втіленні біт керування потужністю може бути закодований разом з користувацькими даними, що може виявитись небажаним внаслідок додаткової затримки, зумовленої необхідністю декодувати весь пакет, щоб витягти дані для керування потужністю Крім того, біт керування потужністю можна передавати у службовому каналі або призначеному для цього каналі керування потужністю Закодований пакет, який містить біт керування потужністю, надходить до модулятора 72, який модулює дані для передачі У бажаному втіленні модулятор 72 є модулятором розширеного спектру, описаним у патентах США 4 901 307 та 5 103 459 Модульований сигнал надходить до передавача 70, який підвищує його частоту, підсилює і передає через дуплексер 68 і антену 66 Антена 50 БС 12 приймає переданий сигнал і спрямовує його до приймача 52 Приймач 52 знижує частоту сигналу, підсилює його і надсилає до демодулятора 54 У бажаному втіленні демодулятор 54 демодулює прийнятий сигнал згідно з фор 12 11 57747 матом розширеного спеїсгру, як це описано у патеУ іншому втіленні МС 18 надсилає більш, ніж нтах США 4 901 307 та 5 103 459 Демодульований один біт, які визначають обчислене значення Еь/Nt кадр надходить до декодера 56, який, згідно з баТаке повідомлення може нести квантоване знажаним втіленням, відокремлює з інформаційного чення Еь/Nt У ще одному втіленні МС 18 передає повідомлення частину, необхідну для керування сигнал, який несе обчислене Es/Nt, що звільняє МС потужністю, і декодує обидва повідомлення окре18 від необхідності визначати швидкість передачі мо Декодоване інформаційне повідомлення надприйнятого пакета БС 12 знає швидкість передачі силається до ККТМ або іншої БС, як це описано кадру і може визначити, чи задовольняє Еь/Nt ріввище нянню 8 Повідомлення, призначене для керування поНаведений вище опис втілень дає змогу фахітужністю надсилається до процесора 60 керуванвцю застосувати винахід, зробивши на базі конценя, який, використовуючи це повідомлення, форпцій винаходу усі необхідні зміни Винахід не обмує команду керування потужністю Ця команда межений описаними втіленнями і його головні надходить до передавача 62, який у ВІДПОВІДЬ на принципи охоплюють значно ширший об'єм застонеї змінює підсилення сигналів, призначених для сувань передачі ДО/ВЩ ІНШИХ ЗОН ОБСЛУГОВУВАННЯ Фіг .2 57747 13 0 г 12 1 ПРИЙОМ 14 шлотної складової 0 }г г 14 В МР В Н Я ЕНЕРГІЇ ПЛОТНО?ВсДЛЯ Е З М Л Р {£) И ІЮА Н КЕ ПЯА 1г 0 г 16 ЗБИРАННЯ N ЗРАЗКІВ 0 г 18 ОБЧИСЛЕННЯ ОЦІНКИ N4(f) N N ОБЧИСЛЕННЯ ДЛЯ і;0 г БИМІРЮВ. ПОВНОЇ" ЕНЕРПІ"У СМУЗІ ІО 1 г ио ЩГ&2 щ mL N-l ОБЧИСЛЕННЯ РІВНЯ ШУМУ ДЛЯ ЕКЗЕМПЛ ф Nt(fMo-Ior(f) і t г U2 Л ВИМІРЮВАННЯ £b ДНЯ ЕКЗЕМПЛЯРА ВИМІРЮВАННЯ Es(O 1 1 г 14 ОБЧИСЛЕННЯ ОБЧИСЛЕННЯ Eb(f)/Nt(f) г 1 г 16 ОБЄДНДННЯ Eb(f)/NtCf) для усах ЕКЗЕМПЛЯРІВ ОБЄДНАННЯЕь(іШТ(0 ДЛЯ УСІХ ЕКЗЕМПЛЯРІВ | г Фіг.З Комп'ютерна верстка М Клюкш ФІГ.4 Підписано до друку 05 08 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measuring communication line quality parameters in a communication system with extended spectrum
Назва патенту російськоюСпособ и устройство для измерения параметров, характеризующих качество линии связи, в системе связи с расширенным спектром
МПК / Мітки
МПК: H04B 7/00
Мітки: замкнений, система, замкнена, пдкр, потужністю, системі, систем, режимом, каналів, кодовим, керування, спосіб, зв'язку, паралельного, варіанти, розподілом, доступу
Код посилання
<a href="https://ua.patents.su/7-57747-sposib-keruvannya-potuzhnistyu-v-zamknenijj-sistemi-keruvannya-potuzhnistyu-sistemi-zvyazku-z-rezhimom-paralelnogo-dostupu-z-kodovim-rozpodilom-kanaliv-pdkr-varianti-ta-zamknena-si.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування потужністю в замкненій системі керування потужністю системи зв’язку з режимом паралельного доступу з кодовим розподілом каналів (пдкр) (варіанти) та замкнена система керування потужністю систем</a>
Стільникова система зв’язку (варіанти), спосіб керування потужністю передачі у стільниковій системі зв’язку (варіанти), мобільний пристрій та контролер стільникової станції та системи
Номер патенту: 42677
Опубліковано: 15.11.2001
Автори: Уівер Ліндсі А. мол., Блейкні Роберт Д., Гілхаузен Клайн С., Уітлі Чарлз Е., Падовейні Роберто
МПК: H04L 27/26
Мітки: передачі, система, стільниковій, спосіб, керування, пристрій, зв'язку, стільникова, варіанти, системі, стільникової, контролер, станції, потужністю, мобільній
Формула / Реферат:
1. Сотовая система связи, в которой пользователь (16, 18) системы поддерживает двустороннюю связь с другим пользователем несущими информацию модулированными сигналами расширенного спектра, передаваемыми через несколько сотовых станций (12, 14), отличающаяся тем, что пользователь (16, 18) системы имеет передатчик (84) для передачи несущих информацию модулированных сигналов расширенного спектра указанным сотовым станциям (12, 14), приемники...
Система зв’язку з багатостанційним доступом та кодовим розділенням сигналів з розширеним спектром (варіанти) і спосіб здійснення зв’язку у цій системі
Номер патенту: 41256
Опубліковано: 17.09.2001
Автор: Дент Поль В.
МПК: H04B 7/204
Мітки: розширеним, здійснення, варіанти, багатостанційним, цій, зв'язку, спосіб, спектром, розділенням, системі, доступом, кодовим, система, сигналів
Формула / Реферат:
1. Система связи с многостанционным доступом и кодовым разделением сигналов с расширенным спектром, при этом каждая станция содержит средство передачи для расширения информационного сигнала с помощью соответствующего кода расширения и для передачи расширенного сигнала, и принимающее устройство для приема составного сигнала, состоящего из множества перекрывающихся расширенных сигналов, отличающаяся тем, что принимающее средство для приема...
Спосіб переведення зв’язку абонентського пристрою у безпровідній системі зв’язку (варіанти), спосіб роботи абонентського пристрою у цій системі та стільникова телефонна система, що забезпечує обслуговування або
Номер патенту: 46827
Опубліковано: 17.06.2002
Автор: Агре Деніел Г.
МПК: H04Q 7/38, H04Q 7/22, H04B 7/26
Мітки: роботи, система, спосіб, цій, забезпечує, варіанти, обслуговування, пристрою, безпровідній, зв'язку, абонентського, стільникова, переведення, системі, телефонна
Формула / Реферат:
1. Спосіб переведення зв'язку абонентського пристрою у безпровідній системі з режиму з використанням радіочастотного (РЧ) сигнального інтерфейсу ПДКУ у режим з використанням сигнального РЧ інтерфейсу ГСМ під час телефонного сеансу зв'язку, який включає операції:а) визначення того, що абонентський пристрій, працюючи у режимі з ПДКУ, знаходиться у заздалегідь визначених умовах; iб) обміну даними з абонентським пристроєм згідно з...
Система та спосіб управління потужністю глобальної багатосупутникової системи
Номер патенту: 26214
Опубліковано: 19.07.1999
Автори: Петерсон Кеннет Мейнард, Бертіджер Барі Роберт, Леопольд Реймонд Джозеф
МПК: H04B 7/185
Мітки: спосіб, багатосупутникової, управління, потужністю, глобальної, системі, система
Формула / Реферат:
1, Система, управления мощностью глобальной многоспутниковой системы, в которой входящие в нее спутники образуют созвездие с пересекающимися орбитами, причем каждый спутник содержит множество антенн, проецирующих множество лепестков диаграмм направленности на земную поверхность, причем каждый лепесток имеет первую зону обслуживания на земной поверхности, или "ячейку", причем сумма ячеек для каждого спутника образует вторую зону...
Спосіб функціонування системи зв’язку (варіанти), система зв’язку (варіанти) та мультиплексор режиму асинхронної передачі (варіанти)
Номер патенту: 46055
Опубліковано: 15.05.2002
Автор: Крісті Джозеф Майкл
МПК: H04L 12/64
Мітки: режиму, передачі, варіанти, мультиплексор, системі, система, спосіб, зв'язку, функціонування, асинхронної
Формула / Реферат:
1. Спосіб функціонування системи зв'язку для забезпечення викликів з використанням віртуального з'єднання, при якому користувач поміщає виклик шляхом передачі сигналізації для виклику до системи зв'язку і передачі інформації користувача в систему зв'язку конкретним з'єднанням за викликом, при цьому система містить ATM (режиму асинхронної передачі) мультиплексор, що забезпечує міжмережний обмін, та процесор сигналізації, зв'язаний з ATM...
Попередній патент: Похідне пурину, фармацевтична композиція та спосіб лікування
Наступний патент: Куля для патронів до засобів активної оборони
Випадковий патент: Металобетонне просторове перекриття