Хвильовий п’єзоелектричний двигун
Номер патенту: 70782
Опубліковано: 15.10.2004
Автори: Лавріненко В'ячеслав Васильович, Проценко Сергій Сергійович, Алєкс Тішко
Формула / Реферат
1. Хвильовий п'єзоелектричний двигун, що містить нерухому частину - статор і притиснуту до статора принаймні однією плоскою поверхнею, рухому частину; згаданий статор включає п'єзоелектричний осцилятор з п'єзоелементом, однією із протилежних поверхонь, взаємодіючих з плоскою поверхнею рухомої частини чи безпосередньо або через зносостійку прокладку, причому згаданий п'езоелемент містить пари електродів і поляризований у напрямку перпендикулярному до згаданих електродів, згадані пари електродів містять виводи для підключення до двох джерел змінної напруги однієї частоти, але зміщені по фазі, який відрізняється тим, що осцилятор виконаний у формі прямокутного бруска з плоскими поверхнями, який складається по довжині з трьох частин, дві крайні згадані частини мають рівні хвильові опори та відрізняються від хвильового опору середньої частини для акустичних коливань, розповсюджуваних уздовж довжини згаданого бруска, причому згадана рухома частина спряжена з середньою частиною бруска, для створення фрикційного контакту.
2. Пристрій за п. 1, який відрізняється тим, що хвильовий опір крайніх частин брусків більше хвильового опору середньої частини брусків, а довжина крайніх частин брусків дорівнює половині довжини хвилі акустичних коливань, що поширюються по довжині бруска помноженій на n, де n=1, 2, 3, 4...
3. Пристрій за п. 1, який відрізняється тим, що хвильовий опір крайніх частин брусків менше хвильового опору середньої частини бруска, а довжина крайніх частин бруска дорівнює чверті довжини хвилі акустичних коливань, що поширюються по довжині бруска, помноженій на m, де m- непарні числа.
4. Пристрій за пп. 1-3, який відрізняється тим, що електроди нанесені на поверхні, перпендикулярні поверхням зіткнення рухомої частини зі статором.
5. Пристрій за пп. 2 і 4, який відрізняється тим, що n=1, а дві пари електродів нанесені на середню частину бруска і електрично з'єднані послідовно, а інші дві пари електродів нанесені на крайні частини бруска, і паралельно з'єднані між собою, причому вся довжина бруска дорівнює півтори довжині хвилі подовжніх коливань, що поширюються вздовж бруска.
6. Пристрій за пп. 3 і 4, який відрізняється тим, що m=1, одна пара електродів нанесена на середню частину бруска, а дві інши пари електродів нанесені на крайні частини бруска та з'єднані електрично паралельно - перехресно, причому вся довжина бруска дорівнює довжині хвилі подовжніх коливань, що поширюються вздовж бруска.
Текст
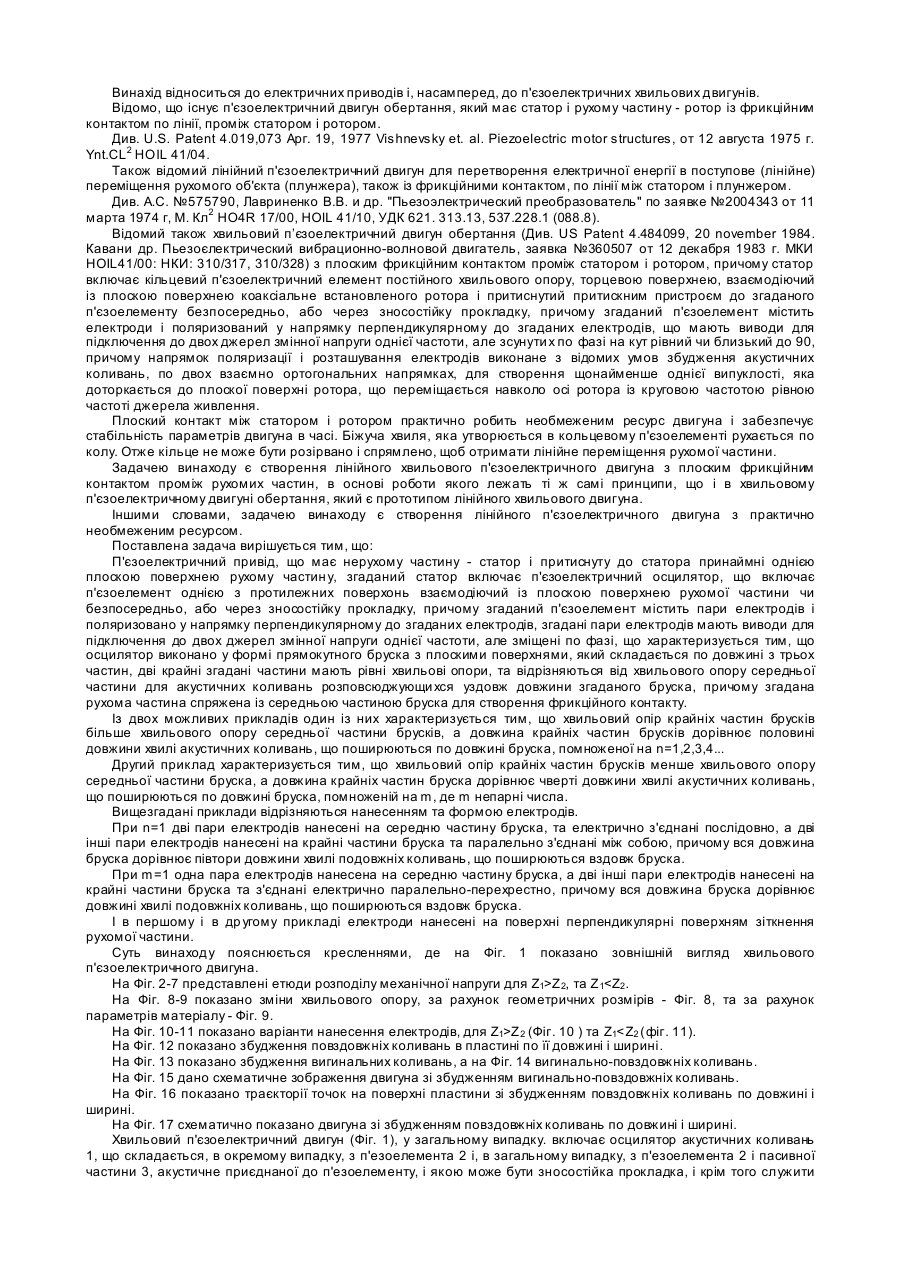
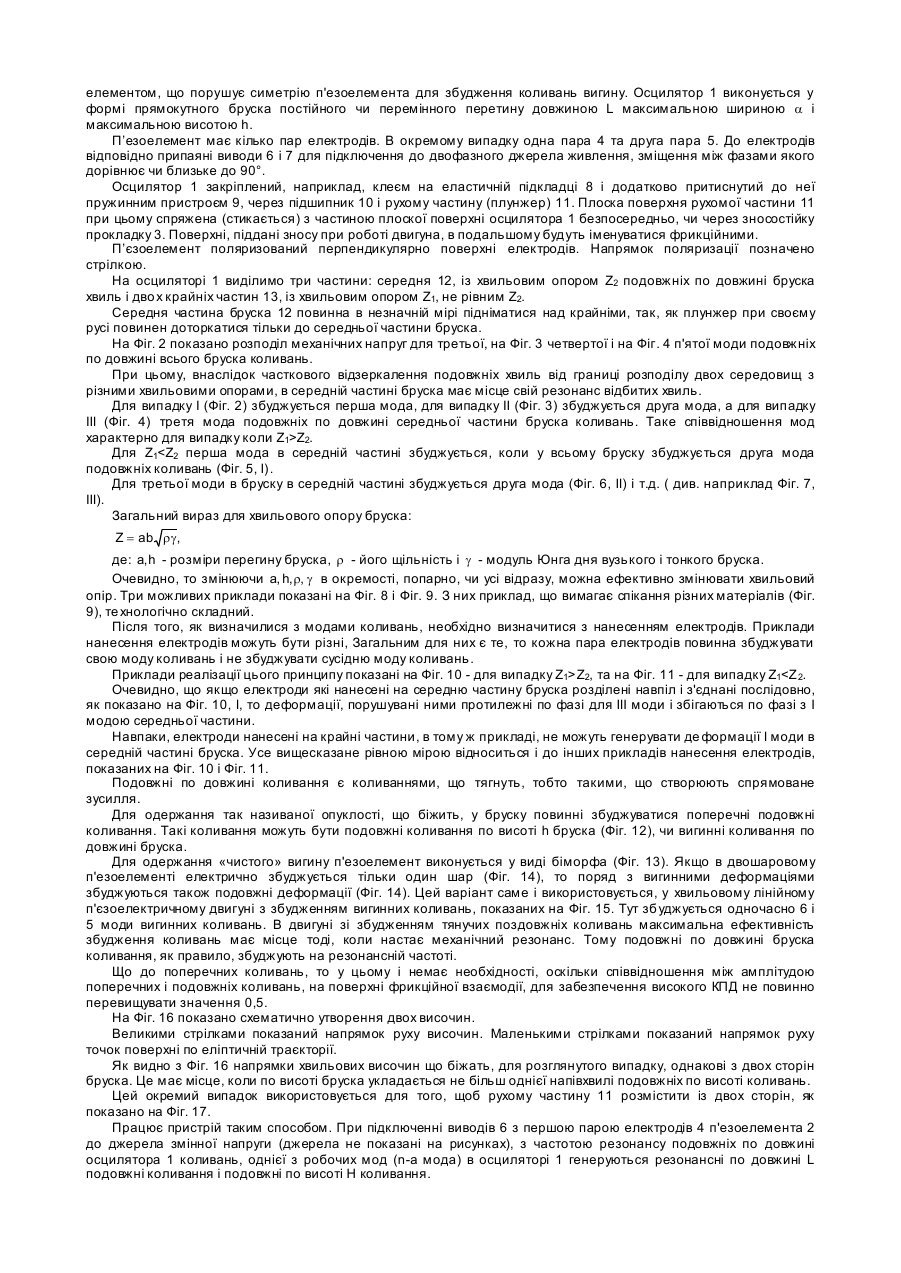
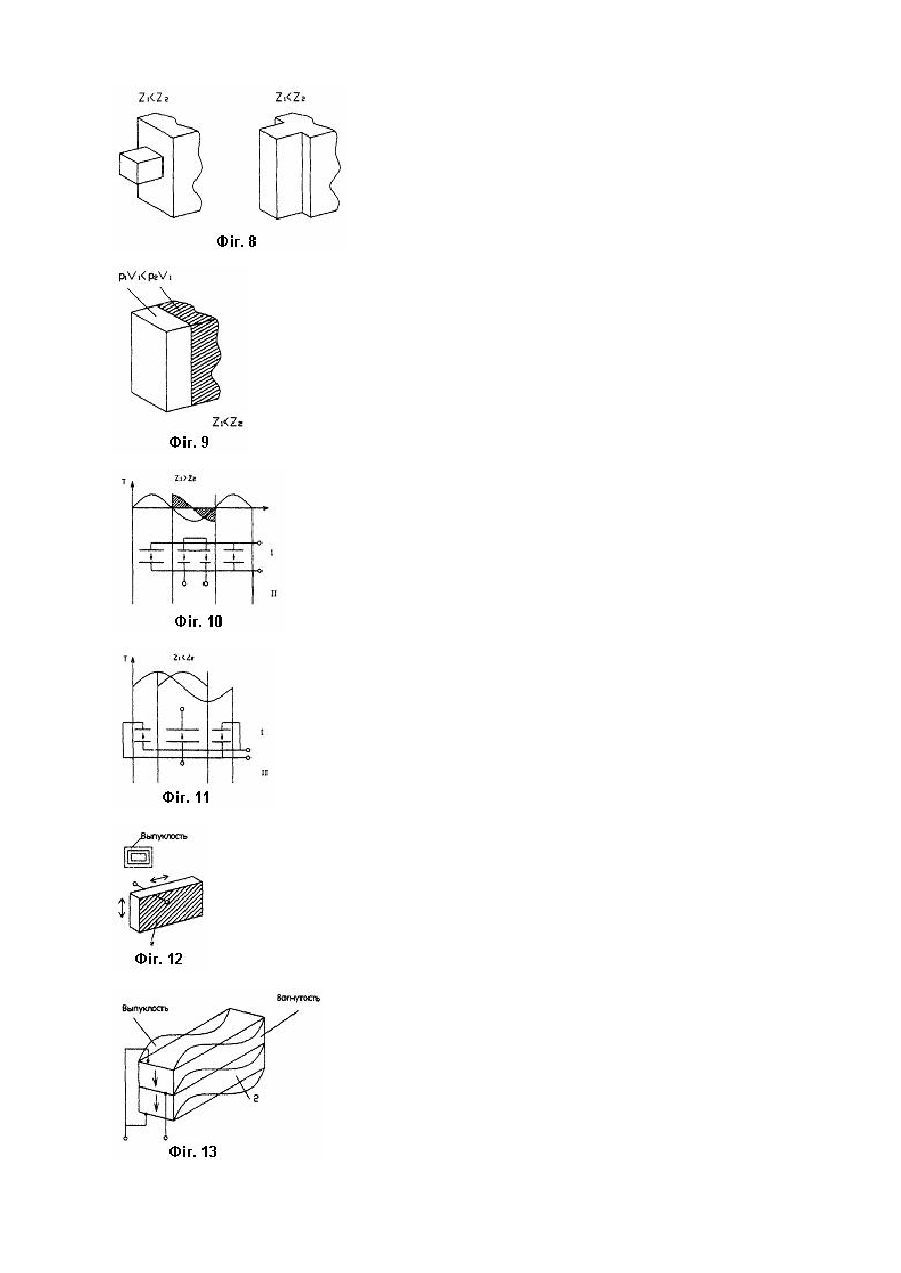
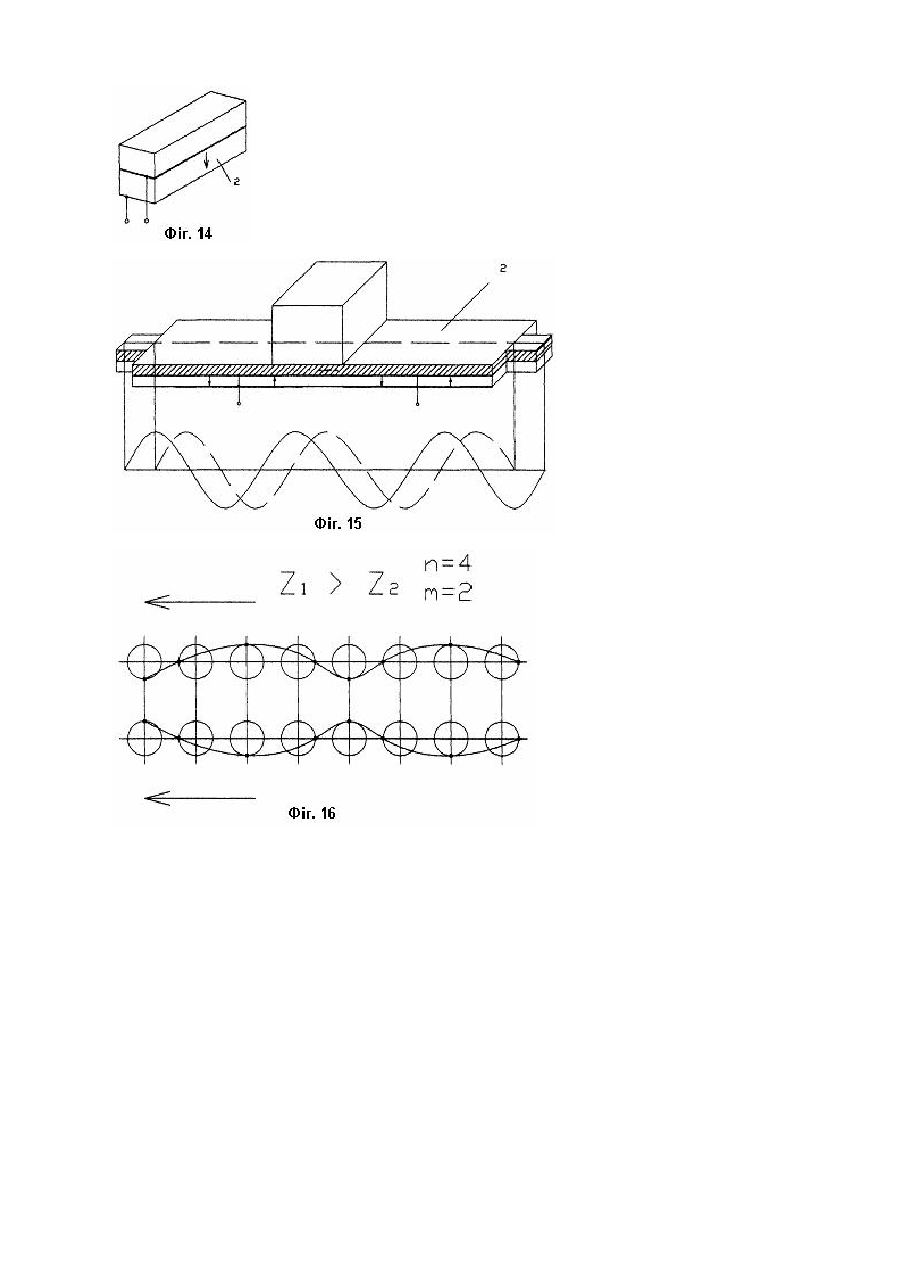
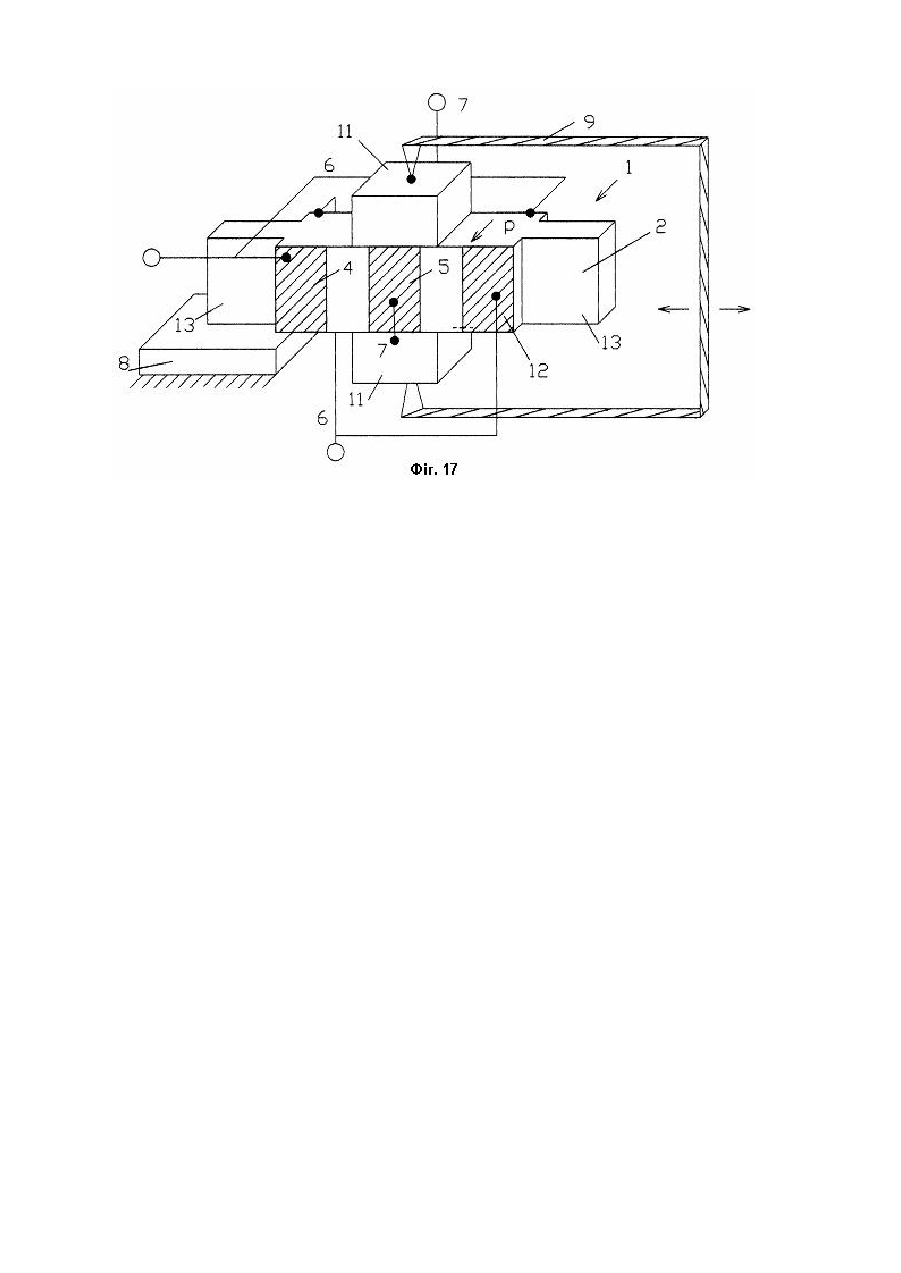
Винахід відноситься до електричних приводів і, насамперед, до п'єзоелектричних хвильових двигунів. Відомо, що існує п'єзоелектричний двигун обертання, який має статор і рухому частину - ротор із фрикційним контактом по лінії, проміж статором і ротором. Див. U.S. Patent 4.019,073 Арг. 19, 1977 Vishnevsky et. al. Piezoelectric motor structures, от 12 августа 1975 г. Ynt.CL2 НОІL 41/04. Також відомий лінійний п'єзоелектричний двигун для перетворення електричної енергії в поступове (лінійне) переміщення рухомого об'єкта (плунжера), також із фрикційними контактом, по лінії між статором і плунжером. Див. A.C. №575790, Лавриненко В.В. и др. "Пьезоэлектрический преобразователь" по заявке №2004343 от 11 марта 1974 г, M. Кл2 HО4R 17/00, HOІL 41/10, УДК 621. 313.13, 537.228.1 (088.8). Відомий також хвильовий п’єзоелектричний двигун обертання (Див. US Patent 4.484099, 20 november 1984. Кавани др. Пьезоєлектрический вибрационно-волновой двигатель, заявка №360507 от 12 декабря 1983 г. МКИ HОІL41/00: НКИ: 310/317, 310/328) з плоским фрикційним контактом проміж статором і ротором, причому статор включає кільцевий п'єзоелектричний елемент постійного хвильового опору, торцевою поверхнею, взаємодіючий із плоскою поверхнею коаксіальне встановленого ротора і притиснутий притискним пристроєм до згаданого п'єзоелементу безпосередньо, або через зносостійку прокладку, причому згаданий п'єзоелемент містить електроди і поляризований у напрямку перпендикулярному до згаданих електродів, що мають виводи для підключення до двох джерел змінної напруги однієї частоти, але зсунути х по фазі на кут рівний чи близький до 90, причому напрямок поляризації і розташування електродів виконане з відомих умов збудження акустичних коливань, по двох взаємно ортогональних напрямках, для створення щонайменше однієї випуклості, яка доторкається до плоскої поверхні ротора, що переміщається навколо осі ротора із круговою частотою рівною частоті джерела живлення. Плоский контакт між статором і ротором практично робить необмеженим ресурс двигуна і забезпечує стабільність параметрів двигуна в часі. Біжуча хвиля, яка утворюється в кольцевому п'єзоелементі рухається по колу. Отже кільце не може бути розірвано і спрямлено, щоб отримати лінійне переміщення рухомої частини. Задачею винаходу є створення лінійного хвильового п'єзоелектричного двигуна з плоским фрикційним контактом проміж рухомих частин, в основі роботи якого лежать ті ж самі принципи, що і в хвильовому п'єзоелектричному двигуні обертання, який є прототипом лінійного хвильового двигуна. Іншими словами, задачею винаходу є створення лінійного п'єзоелектричного двигуна з практично необмеженим ресурсом. Поставлена задача вирішується тим, що: П'єзоелектричний привід, що має нерухому частину - статор і притиснуту до статора принаймні однією плоскою поверхнею рухому частин у, згаданий статор включає п'єзоелектричний осцилятор, що включає п'єзоелемент однією з протилежних поверхонь взаємодіючий із плоскою поверхнею рухомої частини чи безпосередньо, або через зносостійку прокладку, причому згаданий п'єзоелемент містить пари електродів і поляризовано у напрямку перпендикулярному до згаданих електродів, згадані пари електродів мають виводи для підключення до двох джерел змінної напруги однієї частоти, але зміщені по фазі, що характеризується тим, що осцилятор виконано у формі прямокутного бруска з плоскими поверхнями, який складається по довжині з трьох частин, дві крайні згадані частини мають рівні хвильові опори, та відрізняються від хвильового опору середньої частини для акустичних коливань розповсюджующи хся уздовж довжини згаданого бруска, причому згадана рухома частина спряжена із середньою частиною бруска для створення фрикційного контакту. Із двох можливих прикладів один із них характеризується тим, що хвильовий опір крайніх частин брусків більше хвильового опору середньої частини брусків, а довжина крайніх частин брусків дорівнює половині довжини хвилі акустичних коливань, що поширюються по довжині бруска, помноженої на n=1,2,3,4... Другий приклад характеризується тим, що хвильовий опір крайніх частин брусків менше хвильового опору середньої частини бруска, а довжина крайніх частин бруска дорівнює чверті довжини хвилі акустичних коливань, що поширюються по довжині бруска, помноженій на m, де m непарні числа. Вищезгадані приклади відрізняються нанесенням та формою електродів. При n=1 дві пари електродів нанесені на середню частину бруска, та електрично з'єднані послідовно, а дві інші пари електродів нанесені на крайні частини бруска та паралельно з'єднані між собою, причому вся довжина бруска дорівнює півтори довжини хвилі подовжніх коливань, що поширюються вздовж бруска. При m=1 одна пара електродів нанесена на середню частину бруска, а дві інші пари електродів нанесені на крайні частини бруска та з'єднані електрично паралельно-перехрестно, причому вся довжина бруска дорівнює довжині хвилі подовжніх коливань, що поширюються вздовж бруска. І в першому і в др угому прикладі електроди нанесені на поверхні перпендикулярні поверхням зіткнення рухомої частини. Суть винаходу пояснюється кресленнями, де на Фіг. 1 показано зовнішній вигляд хвильового п'єзоелектричного двигуна. На Фіг. 2-7 представлені етюди розподілу механічної напруги для Z1>Z 2, та Z 1Z 2 (Фіг. 10 ) та Z1Z2. Для Z1Z2, та на Фіг. 11 - для випадку Z1L1, так і навпаки, показані на Фіг. 2-7. Очевидно, що збудження різних мод коливань може мати часткове значення і не змінювати загального принципу роботи лінійного хвильового мотора. Це ж відноситься до способу нанесення електродів, показаних на Фіг. 10-11, а також способу збудження поперечних коливань, показаних на Фіг. 12-14. Можна лише звернути увагу, що збудження двох і більше біжучих опуклостей, як наприклад, має місце в конструкції двигуна показаному на Фіг. 15, забезпечує роботу лінійного двигуна більш стійкою. Збудження подовжно-вигинних коливань, як показано на Фіг. 8 енергетично вигідніше, тому що вигин збуджується при меншій висоті осцилятора. Такі двигуни мають вищий коефіцієнт корисної дії, однак, надійність клеєних осциляторів поступає монолітним осциляторам. Крім того, клеєні осцилятори складніші у виго товленні. Коефіцієнт корисної дії можна трохи збільшити, якщо навантаження осцилятора знімати з двох його сторін, як показано на Фіг. 17. У цьому випадку зменшуються втрати на кріплення осцилятора, а також збільшується енергія, що відводиться від осцилятора.
ДивитисяДодаткова інформація
Назва патенту англійськоюWave piezoelectric motor
Назва патенту російськоюВолновой пьезоэлектрический двигатель
МПК / Мітки
МПК: H02N 2/00, H01L 41/09
Мітки: п'єзоелектричний, двигун, хвильовий
Код посилання
<a href="https://ua.patents.su/7-70782-khvilovijj-pehzoelektrichnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Хвильовий п’єзоелектричний двигун</a>
Хвильовий двигун та спосіб його установлення
Номер патенту: 39353
Опубліковано: 15.06.2001
Автори: Тисінюк Ігор Миколайович, Тисінюк Микола Максимович
МПК: F03B 13/22
Мітки: спосіб, хвильовий, двигун, установлення
Формула / Реферат:
1.Хвильовий двигун, який відрізняється тим, що виготовлений у вигляді широкого колеса діаметром, сумірним з висотою найбільш продуктивних хвиль, характерних для місця установлення, а лопаті виконані такої довжини, що її проекція на напрямок руху фронту хвиль більша довжини цих хвиль.2. Спосіб установлення хвильового двигуна, який відрізняється тим, що його установлюють на морському мілководді під кутом, в залежності від рельєфу...
Хвильовий двигун

Номер патенту: 65715
Опубліковано: 15.04.2004
Автор: Четверик Анатолій Іванович
МПК: B63H 19/00
Формула / Реферат:
1. Хвильовий двигун, що утримує просторову форму у вигляді поздовжніх паралельних балок, жорстко скріплених поперечними балками, спорядженими кронштейнами для прикріплення до корпусу судна, який відрізняється тим, що він споряджений хвильовими рушіями у вигляді самовстановних на заплановані кути атаки до набігаючого потоку лопаток, шарнірно закріплених між парами паралельно розташованих вертикальних стояків, жорстко прикріплених до поздовжніх...
Хвильовий ланцюговий редуктор
Номер патенту: 68716
Опубліковано: 16.08.2004
Автори: Дорохов Микола Юрійович, Крупко Валерій Григорович
МПК: F16G 13/00
Мітки: ланцюговий, редуктор, хвильовий
Формула / Реферат:
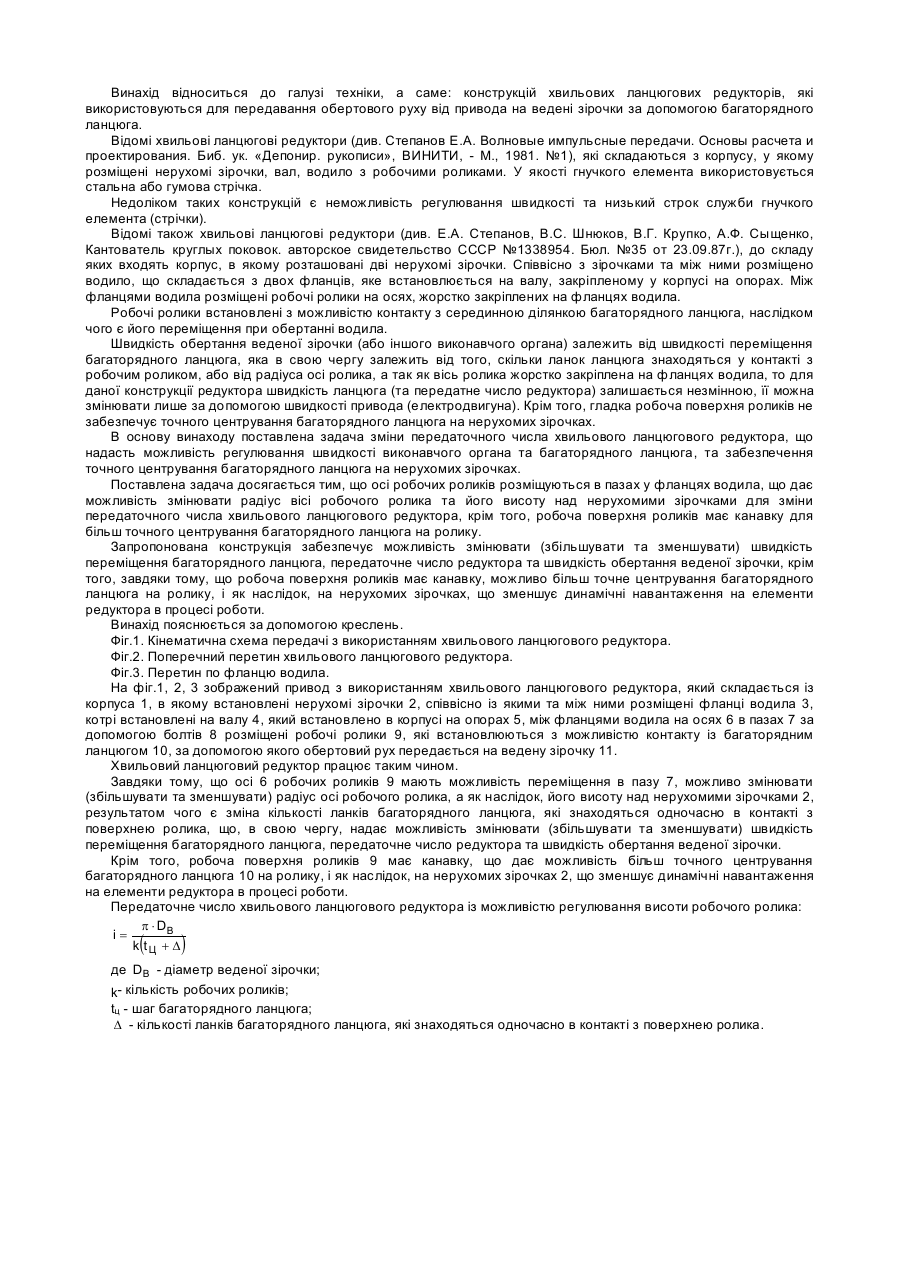
Хвильовий ланцюговий редуктор, до складу якого входять корпус, в якому розташовані дві нерухомі зірочки, співвісно з якими та між ними розміщено водило, що складається з двох фланців, яке встановлене на валу, закріпленому у корпусі на опорах, а між фланцями водила розміщені робочі ролики на осях, які закріплені на фланцях водила, який відрізняється тим, що осі робочих роликів розміщені у пазах у фланцях водила з можливістю переміщення, що дає...
Хвильовий обмінник тиску
Номер патенту: 55255
Опубліковано: 17.03.2003
Автор: Ерсмамбетов Вячеслав Шихаметович
МПК: F04F 11/00
Мітки: хвильовий, тиску, обмінник
Формула / Реферат:
1. Хвильовий обмінник тиску, що містить корпус з вікнами підведення та відведення активного середовища, середній корпус, корпус з вікнами підведення та відведення пасивного середовища, ротор та електродвигун, вал якого приєднано до вала ротора, який відрізняється тим, що встановлено додатковий корпус приводу у вигляді порожнистого циліндра з днищем, який герметично прикріплено до корпуса з вікнами підведення і відведення пасивного середовища,...
П’єзоелектричний двигун
Номер патенту: 57167
Опубліковано: 16.06.2003
Автор: Петренко Сергій Федорович
МПК: H02N 2/00, H01L 41/09
Мітки: п'єзоелектричний, двигун
Формула / Реферат:
1.П'єзоелектричний двигун, що містить ротор і статор на основі кільцевого п'єзоелемента, одна із циліндричних поверхонь якого замкнена в оболонку, на якій встановлені штовхачі, фрикційно контактуючі з ротором, який відрізняється тим, що додатково включає другий кільцевий п'єзоелемент, кільцеві п'єзоелементи, виконані у вигляді кільцевого резонатора з радіальною формою коливань в робочому стані та підвищеною жорсткістю в радіальному напрямі в...
Попередній патент: Спосіб вимірювання міцності зчеплення покриття з основою
Наступний патент: Конденсатор контурної теплової труби
Випадковий патент: Зшиваюча композиція