Напрямна система
Формула / Реферат
1. Напрямна система, що містить напрямну конструкцію, яка має першу та другу базові поверхні і щонайменше одну замикаючу поверхню, а також каретку, яка має раму, змонтовані на ній першу та другу групи напрямних елементів кочення чи ковзання, що пристосовані для обпирання відповідно на першу та другу базові поверхні напрямної конструкції, і засіб попереднього натягу, пристосований для створення зусиль попереднього натягу, які забезпечують притискання перших та других напрямних елементів кочення чи ковзання до відповідно першої та другої базових поверхонь напрямної конструкції, причому зазначений засіб попереднього натягу включає в себе щонайменше один притискний елемент кочення чи ковзання, пристосований для примусового обпирання на замикаючу поверхню напрямної конструкції за допомогою силового засобу, а друга група напрямних елементів кочення чи ковзання включає в себе два напрямних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на другу базову поверхню у двох умовних опорних точках, які у напрямку вздовж напрямної конструкції розміщені на відстані одна від одної, яка відрізняється тим, що перша група напрямних елементів кочення чи ковзання включає в себе три напрямних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на першу базову поверхню у трьох умовних опорних точках, які розміщені по вершинах першого трикутника.
2. Напрямна система за попереднім пунктом, яка відрізняється тим, що перша та друга базові поверхні розміщені одна до одної під кутом 90 кутових градусів.
3. Напрямна система за будь-яким попереднім пунктом, яка відрізняється тим, що замикаюча поверхня розміщена під гострими кутами до першої та другої базових поверхонь.
4. Напрямна система за п. 2, яка відрізняється тим, що напрямна конструкція має першу та другу замикаючі поверхні, які розміщені у площинах, що паралельні відповідно першій та другій базовим поверхням, причому зазначений засіб попереднього натягу включає в себе щонайменше по одному першому та другому притискному елементу кочення чи ковзання, які пристосовані для примусового обпирання відповідно на першу та другу замикаючі поверхні за допомогою зазначеного силового засобу.
5. Напрямна система за будь-яким попереднім пунктом, яка відрізняється тим, що напрямна конструкція виконана у вигляді одного або двох, або трьох, або чотирьох поздовжніх елементів, на кожному з яких виконано щонайменше одну базову або замикаючу поверхню.
6. Напрямна система за п. 4, яка відрізняється тим, що напрямна конструкція виконана у вигляді одного елемента квадратного або прямокутного перерізу.
7. Напрямна система за п. 4, яка відрізняється тим, що засіб попереднього натягу включає в себе три перших притискних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на першу замикаючу поверхню у трьох умовних опорних точках, які розміщені по вершинах другого трикутника.
8. Напрямна система за попереднім пунктом, яка відрізняється тим, що другий трикутник є дзеркальним відображенням першого трикутника.
9. Напрямна система за п. 7 або 8, яка відрізняється тим, що засіб попереднього натягу включає в себе два других притискних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на другу замикаючу поверхню у двох умовних опорних точках, які у напрямку вздовж напрямної конструкції розміщені на відстані одна від одної, при цьому перші та другі притискні елементи кочення чи ковзання змонтовані на плаваючій рамі, переміщення якої відносно рами каретки, практично, виключені тільки у напрямку вздовж напрямної конструкції, а зазначений силовий засіб змонтований між рамою каретки та плаваючою рамою.
10. Напрямна система за попереднім пунктом, яка відрізняється тим, що плаваюча рама виконана Т-подібною та розташована паралельно першій замикаючій поверхні.
11. Напрямна система за попереднім пунктом, яка відрізняється тим, що перша та друга групи напрямних елементів кочення чи ковзання змонтовані на рамі каретки за допомогою проміжної рами, яка жорстко змонтована на рамі каретки, за формою виконана подібною до плаваючої рами та розташована паралельно першій базовій поверхні напрямної конструкції.
12. Напрямна система за будь-яким із пунктів 4-11, яка відрізняється тим, що зазначений силовий засіб включає в себе щонайменше один перший та щонайменше один другий силові елементи, пристосовані для створення зусилля у напрямках перпендикулярно відповідно першій та другій замикаючим поверхням.
13. Напрямна система за будь-яким із попередніх пунктів, яка відрізняється тим, що напрямний або притискний елемент кочення виконаний у вигляді ролика.
14. Напрямна система за будь-яким із попередніх пунктів 1-12, яка відрізняється тим, що напрямний або притискний елемент кочення виконаний у вигляді балансира з двома роликами або трьома роликами, розміщеними по вершинах трикутника, причому балансир змонтований за допомогою відповідно циліндричного або сферичного шарніра.
15. Напрямна система за будь-яким із попередніх пунктів 1-12, яка відрізняється тим, що напрямний елемент ковзання виконаний у вигляді повзуна, який закріплений за допомогою сферичного шарніра.
Текст
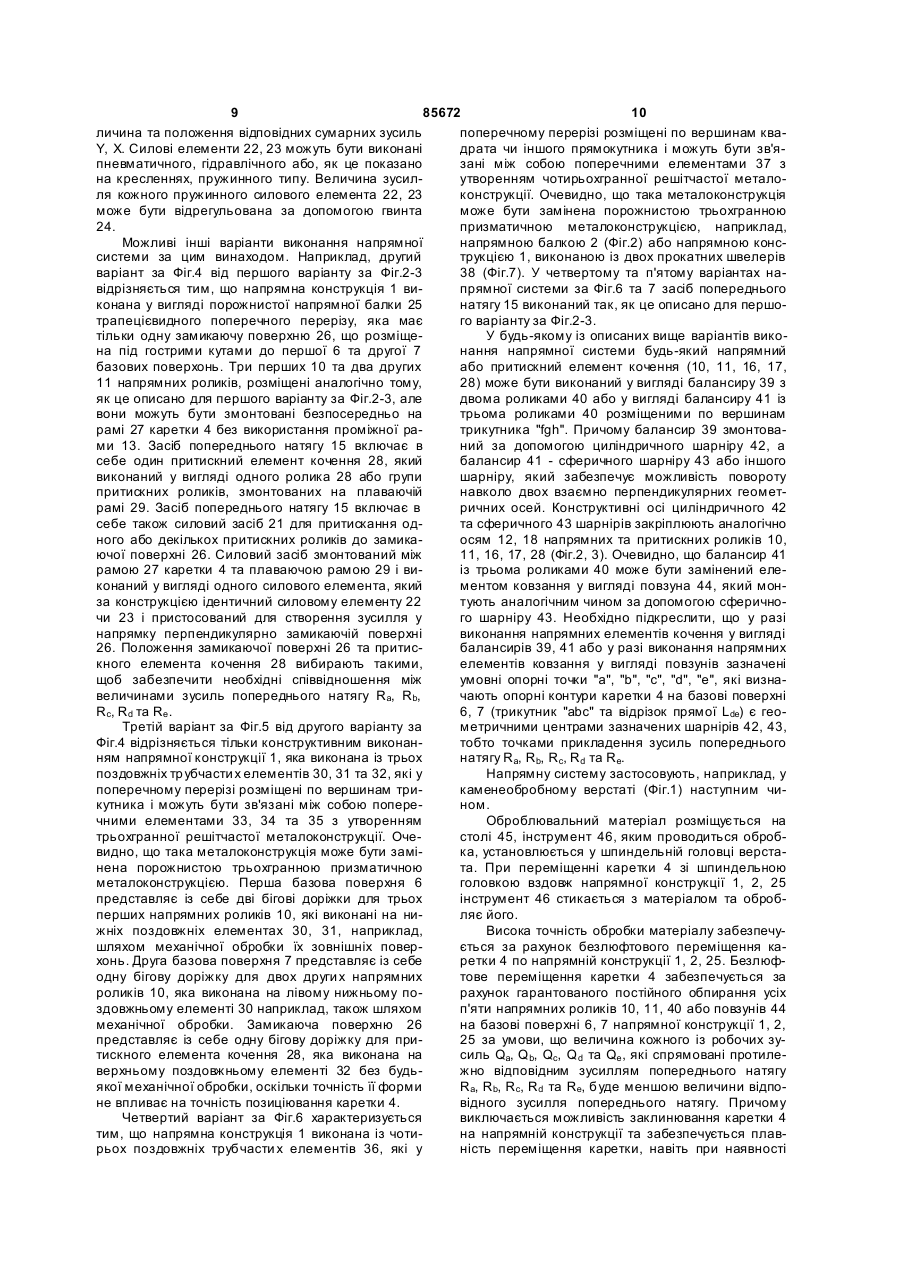
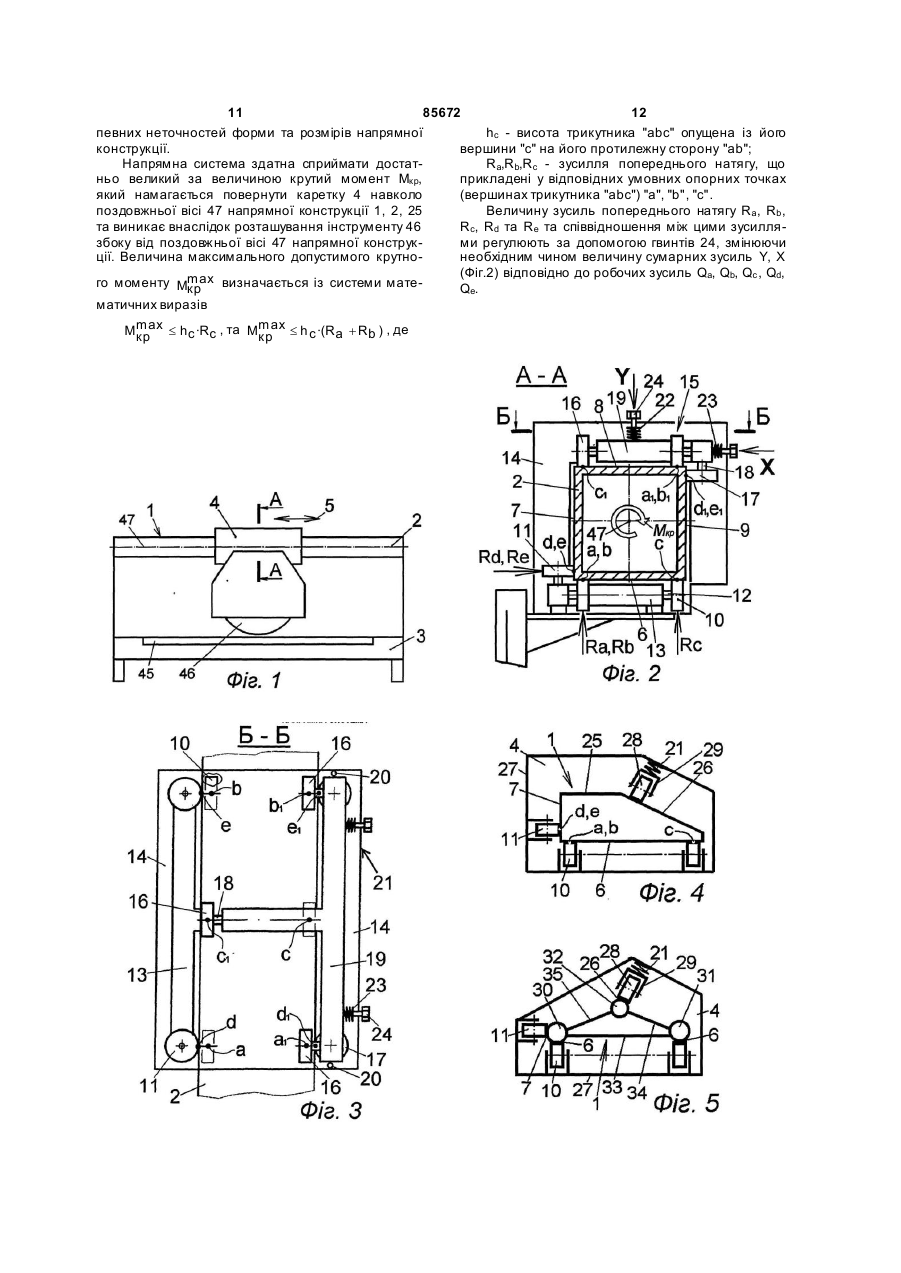
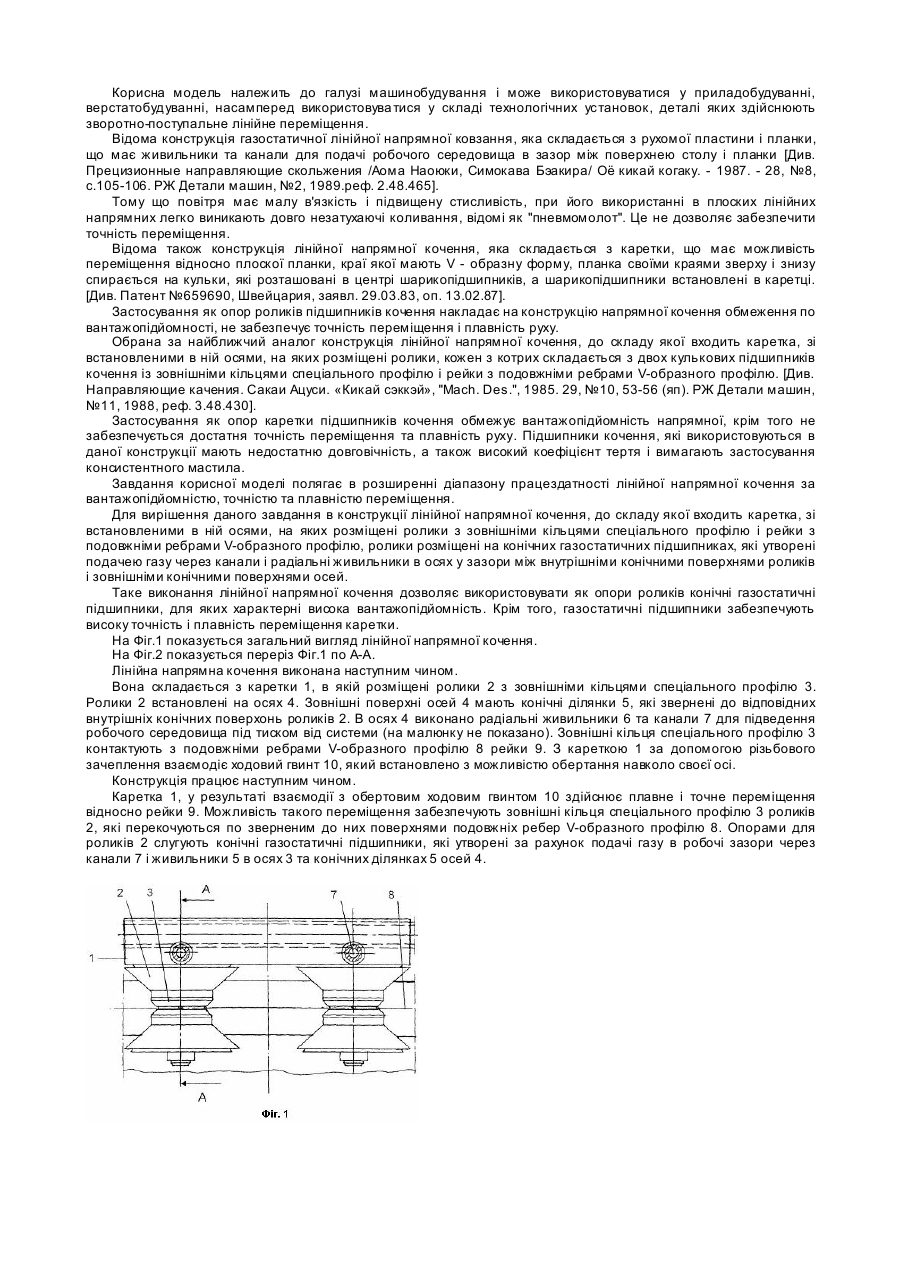
1. Напрямна система, що містить напрямну конструкцію, яка має першу та другу базові поверхні і щонайменше одну замикаючу поверхню, а також каретку, яка має раму, змонтовані на ній першу та другу групи напрямних елементів кочення чи ковзання, що пристосовані для обпирання відповідно на першу та др угу базові поверхні напрямної конструкції, і засіб попереднього натягу, пристосований для створення зусиль попереднього натягу, які забезпечують притискання перших та других напрямних елементів кочення чи ковзання до відповідно першої та другої базових поверхонь напрямної конструкції, причому зазначений засіб попереднього натягу включає в себе щонайменше один притискний елемент кочення чи ковзання, пристосований для примусового обпирання на замикаючу поверхню напрямної конструкції за допомогою силового засобу, а друга гр упа напрямних елементів кочення чи ковзання включає в себе два напрямних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на другу базову поверхню у двох умовних опорних точках, які у напрямку вздовж напрямної конструкції розміщені на відстані одна від одної, яка відрізняється тим, що перша група напрямних елементів кочення чи ковзання включає в себе три напрямних елементи кочення чи ковзання, які пристосовані для забезпечення обпирання каретки на першу базову поверхню у трьох умовних опорних точках, які 2. Напрямна система за попереднім пунктом, яка розміщені по вершинах першого трикутника. відрізняє ться тим, що перша та друга базові поверхні розміщені одна до одної під кутом 90 кутових градусів. 2 (19) 1 3 85672 4 вий засіб змонтований між рамою каретки та пларпендикулярно відповідно першій та другій замиваючою рамою. каючим поверхням. 10. Напрямна система за попереднім пунктом, яка 13. Напрямна система за будь-яким із попередніх відрізняє ться тим, що плаваюча рама виконана пунктів, яка відрізняється тим, що напрямний або Т-подібною та розташована паралельно першій притискний елемент кочення виконаний у вигляді замикаючій поверхні. ролика. 11. Напрямна система за попереднім пунктом, яка 14. Напрямна система за будь-яким із попередніх відрізняє ться тим, що перша та др уга групи напунктів 1-12, яка відрізняється тим, що напрямпрямних елементів кочення чи ковзання змонтований або притискний елемент кочення виконаний у ні на рамі каретки за допомогою проміжної рами, вигляді балансира з двома роликами або трьома яка жорстко змонтована на рамі каретки, за форроликами, розміщеними по вершинах трикутника, мою виконана подібною до плаваючої рами та причому балансир змонтований за допомогою розташована паралельно першій базовій поверхні відповідно циліндричного або сферичного шарнінапрямної конструкції. ра. 12. Напрямна система за будь-яким із пунктів 4-11, 15. Напрямна система за будь-яким із попередніх яка відрізняється тим, що зазначений силовий пунктів 1-12, яка відрізняється тим, що напрямзасіб включає в себе щонайменше один перший та ний елемент ковзання виконаний у вигляді повзущонайменше один другий силові елементи, прина, який закріплений за допомогою сферичного стосовані для створення зусилля у напрямках пешарніра. Винахід відноситься до напрямних систем, які, наприклад, застосовуються у верстатах для обробки плит чи інших виробів з природного та штучного каменю або інших матеріалів, а також у будьяких машинах, механізмах чи пристроях, де необхідно забезпечити плавне лінійне переміщення та достатньо точне позиціювання певного інструмента або іншого їх елемента. Відома напрямна система верстату для розрізання виробів із керамічних матеріалів, що містить дві паралельні одна одній напрямні круглого перерізу, та каретку, яка має перші ролики призматичного профілю та другі циліндричні ролики, які встановлені на верхні поверхні напрямних [Авт.свід. СРСР №311757; МПК: B28D1/04, 7/04; опубл.19.08.1971]. Недоліком такої напрямної системи є, що вона є односторонньою (тобто такою, що забезпечує сприймання тільки зусиль, які притискають ролики до напрямних) і не придатною у випадку, коли при роботі верстату виникають зусилля, які спричиняють відрив (підняття) роликів від поверхні напрямних. По-друге, напрямні круглого перерізу мають недостатню жорсткість та міцність для сприйняття великих робочих навантажень порівняно із коробчастими, двотавровими чи іншими профілями. Відомі двосторонні (тобто такі, що забезпечують сприймання зусиль, які притискають ролики до напрямних та зусиль які спричиняють відрив роликів від поверхні напрямних) напрямні системи першого типу. Для них характерно те, що усі ролики каретки є напрямними і змонтовані на осях, які жорстко закріплені на рамі каретки. Наприклад, відома двостороння напрямна система верстату для розпилювання каменю містить паралельні одна одній напрямні круглого перерізу, та каретку, яка має верхню та нижню пару напрямних роликів призматичного профілю для кожної напрямної, які обпираються на відповідно верхню та нижню поверхні напрямної, та засоби для регулювання зазорів між роликами та поверхнею напрямної, що виконані у вигляді ексцентричних осей роликів [Авт. свід. СРСР №193985; МПК: B28D; опубл.13.03.1967]. Специфічним недоліком даної напрямної системи є те, що, навіть, при дотриманні жорстких вимог до забезпечення невеликих відхилень розмірів поперечного перерізу напрямної вздовж неї, невеликих відхилень відстані між напрямними та невеликих відхилень від прямолінійності та паралельності напрямних практично неможливо забезпечити переміщення каретки без люфтів. Крім того, процес регулювання зазорів між роликами та поверхнею напрямної є досить складним. Іншим прикладом напрямної системи першого типу є відома двостороння напрямна система пристрою для фрезерування виробів із ніздрюватого бетону, що має напрямну прямокутного перерізу, висота якого набагато більша за його ширину, та каретку яка має верхню та нижню групи напрямних роликів, які обпираються на відповідно верхню та нижню поверхні напрямної, та засоби для регулювання зазорів між роликами та поверхнями напрямної, що виконані у вигляді ексцентричних осей частини роликів. Причому, верхня або нижня група роликів має першу пару роликів, які мають горизонтальні осі обертання, рознесені один відносно іншого вздовж напрямної, розташовані по середині напрямної та пристосовані для обпирання на відповідно верхню або нижню поверхню напрямної, та другу пару роликів, які мають вертикальні осі обертання, розташовані один відносно іншого з протилежних боків напрямної та пристосовані для обпирання на відповідні бічні поверхні напрямної [Авт.свід. СРСР №425810; МПК: B28D1/18; опубл.30.04.1974]. Ця напрямна система також не забезпечує переміщення каретки без люфтів, навіть при досить високій точності геометричних розмірів та форми напрямної та системи в цілому. Крім того, процес регулювання зазорів між роликами та поверхнями напрямної є досить складним. Відомі двосторонні напрямні системи другого типу, у яких осі напрямних роликів каретки, що пристосовані для кочення по базових поверхнях 5 85672 6 напрямної, змонтовані на рамі каретки жорстко. елементи кочення чи ковзання, які пристосовані При цьому каретка має засіб для створення зусиль для забезпечення обпирання каретки на другу попереднього натягу, які забезпечують притисканбазову поверхню у дво х умовних опорних точках, ня напрямних роликів до базових поверхонь наякі у напрямку вздовж напрямної конструкції розпрямної. Цей засіб попереднього натягу має приміщені на відстані одна від одної, відповідно до тискні ролики, що пристосовані для кочення по винаходу перша гр упа напрямних елементів козамикаючих поверхнях напрямної. При цьому вісі чення чи ковзання включає в себе три напрямних притискних роликів встановлені з можливістю пеелементи кочення чи ковзання, які пристосовані реміщення відносно рами каретки, а зазначений для забезпечення обпирання каретки на першу засіб попереднього натягу має пружини для прибазову поверхню у трьох умовних опорних точках, тискання зазначених притискних роликів до замиякі розміщені по вершинам першого трикутника. каючих поверхонь напрямної, так, щоб забезпечиЗавдяки цьому забезпечується гарантоване ти притискання напрямних роликів до базових постійне обпирання усіх п'яти напрямних елеменповерхонь зусиллями попереднього натягу [Патів кочення чи ковзання на базові поверхні напрятент RU №2082028, МПК6: F16C29/04, мної конструкції з відносно постійними регульоваопубл.20.06.1997; заявка RU №94030346, МПК6: ними зусиллями, які практично не залежать від F16C29/04, опубл.20.08.1996]. наявності певних відхилень форми та розмірі наНайбільш близькою є відома двостороння напрямної конструкції. І, як наслідок, безлюфтове прямна система за вказаною вище заявкою RU плавне переміщення каретки та повне виключення №94030346, яка містить напрямну трикутного пеїї заклинювання. Внаслідок обпирання каретки на рерізу та каретку, що має дві гр упи напрямних ропершу базову поверхню у трьох умовних опорних ликів, які обпираються на дві суміжні розташовані точках, які розміщені по вершинам першого трикупід кутом 60° базові поверхні напрямної. Осі натника забезпечується сприйняття достатньо велипрямних роликів жорстко закріплені на рамі кареткого крутного моменту, який намагається повернуки, яка має засіб попереднього натягу. Цей засіб ти каретку навколо поздовжньої осі напрямної включає в себе притискний ролик, що обпирається конструкції. на третю поверхню напрямної, яка є замикаючою. Зазначені вище позитивні технічні та те хнолоВісь притискного ролика змонтована з можливістю гічні властивості напрямної системи, у набутті яких переміщення відносно рами каретки, а засіб попеполягає технічний результат винаходу, реалізуреднього натягу має силовий засіб у вигляді пруються, посилюються чи доповнюються іншими жини, пристосованої для притискання другого ропозитивними властивостями у конкретних виколика до замикаючої поверхні напрямної. наннях напрямної системи, які очевидні для спеціНедоліком даної напрямної системи є те, що вона аліста із врахування відомостей, що наведені у не пристосована для сприйняття значного по веприкладах здійснення винаходу, та можуть харакличині крутного моменту, який намагається повертеризуватися наступним. нути каретку навколо поздовжньої осі напрямної. Перша та друга базові поверхні розміщені одЗадача винаходу полягає в удосконаленні нана до одної під кутом 90 кутових градусів. прямної системи з метою забезпечення сприйнятЗамикаюча поверхня розміщена під гострими тя достатньо великого крутного моменту, який накутами до першої та другої базових поверхонь. магається повернути каретку навколо поздовжньої Напрямна конструкція має першу та другу заосі напрямної конструкції, з одночасним забезпемикаючі поверхні, які розміщені у площинах, що ченням плавного переміщення каретки без люфтів паралельні відповідно першій та другій базовим при помірних вимогах до точності геометричних поверхням, причому зазначений засіб попередньорозмірів та форми напрямної та системи в цілому, го натягу включає в себе, щонайменше, по одному а також спрощення регулювання напрямної систепершому та другому притискному елементу коченми. ня чи ковзання, які пристосовані для примусового Зазначена задача вирішена тим, що у напрямобпирання відповідно на першу та другу замикаючі ній системі, що містить напрямну конструкцію, яка поверхні за допомогою зазначеного силового замає першу та другу базові поверхні і, щонайменсобу. ше, одну замикаючу поверхню, а також каретку, Напрямна конструкція виконана у вигляді одяка має раму, змонтовані на ній першу та другу ного, двох, трьох чи чотирьох поздовжніх елеменгрупи напрямних елементів кочення чи ковзання, тів, на кожному з яких виконано, щонайменше, що пристосовані для обпирання відповідно на пеодну базову або замикаючу поверхню. ршу та другу базові поверхні напрямної конструкНапрямна конструкція виконана у вигляді одції, і засіб попереднього натягу, пристосований для ного елементу квадратного або прямокутного пестворення зусиль попереднього натягу, які забезрерізу. печують притискання перших та други х напрямних Засіб попереднього натягу включає в себе три елементів кочення чи ковзання до відповідно перперших притискних елементи кочення чи ковзання, шої та др угої базових поверхонь напрямної консякі пристосовані для забезпечення обпирання катрукції, причому зазначений засіб попереднього ретки на першу замикаючу поверхню у трьох умонатягу включає в себе, щонайменше, один притисвних опорних точках, які розміщені по вершинам кний елемент кочення чи ковзання, пристосований другого трикутника. для примусового обпирання на замикаючу поверхДругий трикутник є дзеркальним відображенню напрямної конструкції за допомогою силового ням першого трикутника. засобу, а друга гр упа напрямних елементів коченЗасіб попереднього натягу включає в себе два ня чи ковзання включає в себе два напрямних други х притискних елементи кочення чи ковзання, 7 85672 8 які пристосовані для забезпечення обпирання кавключає в себе три перших напрямних ролики 10, ретки на другу замикаючу поверхню у дво х умовякі пристосовані для забезпечення обпирання каних опорних точках, які у напрямку вздовж напряретки 4 на першу базову поверхню 6 у трьох умовмної конструкції розміщені на відстані одна від них опорних точках "а", "b", "с", що розміщені по одної, при цьому перші та другі притискні елеменвершинам першого трикутника "abc". Друга група ти кочення чи ковзання змонтовані на плаваючій напрямних роликів включає в себе два других нарамі, переміщення якої відносно рами каретки, прямних ролики 11, які пристосовані для забезпепрактично, виключенні тільки у напрямку вздовж чення обпирання каретки 4 на другу базову повернапрямної конструкції, а зазначений силовий засіб хню 7 у дво х умовних опорних точках "d", "е", які у змонтований між рамою каретки та плаваючою напрямку 5 вздовж напрямної балки розміщені на рамою. відстані Lde одна від одної. Необхідно підкреслити, Плаваюча рама виконана Т-подібною та розщо у разі виконання напрямних елементів кочення ташована паралельно першій замикаючій поверху вигляді роликів 10, 11 зазначені умовні опорні ні. точки "а", "b", "с", "d", "e", які визначають опорні Перша та друга гр упи напрямних елементів контури каретки 4 на базові поверхні 6, 7 (трикуткочення чи ковзання змонтовані на рамі каретки за ник "abc" та відрізок прямої Lde) є геометричними допомогою проміжної рами, яка жорстко змонтоцентрами площадок контакту напрямних роликів вана на рамі каретки, за формою виконана подіб10, 11 із базовими поверхнями 6, 7 і точками приною до плаваючої рами та розташована паралекладення зусиль попереднього натягу Ra, Rb, Re, льно першій базовій поверхні напрямної Rd та Re. конструкції. Консольні вісі 12 перших 10 та других 11 наЗазначений силовий засіб включає в себе, прямних роликів жорстко закріплені на проміжній щонайменше, один перший та, щонайменше, один рамі 13, яка розташована паралельно першій бадругий силові елементи, пристосовані для ствозовій поверхні 6 напрямної балки 2 та жорстко рення зусилля у напрямках перпендикулярно відзакріплена на рамі 14 каретки 4. повідно першій та другій замикаючим поверхням. Каретка 4 має також засіб попереднього натяНапрямний або притискний елемент кочення гу 15, пристосований для створення зусиль попевиконаний у ви гляді ролика. реднього натягу Ra, Rb, Rc, Rd та Re, які забезпеНапрямний або притискний елемент кочення чують притискання перших 10 та други х 11 виконаний у вигляді балансиру з двома роликами напрямних роликів до відповідних базових поверабо трьома роликами розміщеними по вершинам хонь 6, 7 напрямної балки 2. Засіб попереднього трикутника, причому балансир змонтований за натягу 15 включає в себе три перші 16 та два другі допомогою відповідно циліндричного або сферич17 притискні елементи, наприклад, кочення, виконого шарніру. нані у вигляді відповідно перших 16 та други х 17 Напрямний елемент ковзання виконаний у вироликів. Перші притискні ролики 16 пристосовані гляді повзуна, який закріплений за допомогою для забезпечення обпирання каретки 4 на першу сферичного шарніру. замикаючу поверхню 8 у трьох умовних опорних Винахід пояснений кресленнями, на яких: на точках "а1", "b1", "c1", що розміщені по вершинам Фіг.1 представлений, наприклад, каменеобробний другого трикутника "a1b1c1". Причому другий трикуверстат, із напрямною системою за цим винахотник "a1b1c1" є дзеркальним відображенням першодом, вид збоку; на Фіг.2 - розріз А-А на Фіг.1; на го трикутника "abc". Другі притискні ролики 17 приФіг.3 - розріз Б-Б на Фіг.2; на Фіг.4-7 - схеми варіастосовані для забезпечення обпирання каретки 4 нтів виконання напрямної системи; на Фіг.8-9 на другу замикаючу поверхню 9 у двох умовних схеми варіантів виконання напрямного або притиопорних точках "d1 ", "е1" які у напрямку 5 вздовж скного елемента кочення; на Фіг.10 - схема виконапрямної балки 2 розміщені на відстані L d1e1 одна нання напрямного або притискного елемента коввід одної. Консольні вісі 18 перших 16 та других 17 зання. притискних роликів жорстко змонтовані на плаваНапрямна система за цим винаходом, наприючій рамі 19, переміщення якої відносно рами 14 клад, для каменеобробного верстату за Фіг.1, має каретки 4 за допомогою, наприклад, упорів 20, напрямну конструкцію 1, виконану у першому варіпрактично, виключено тільки у напрямку 5 вздовж анті виконання напрямної системи за Фіг.2, 3 у напрямної балки 2. Плаваюча рама 19 виконана Твигляді, наприклад, порожнистої напрямної балки подібною та розташована паралельно першій за2 квадратного або прямокутного поперечного пемикаючій поверхні 8. Причому, плаваюча рама 19 рерізу закріпленої на станині 3 верстату, та каретта проміжна рама 13 виконані подібними одна одку 4, яка змонтована на зазначеній напрямній балній за формою та розмірами. ці 2 з можливістю переміщення вздовж неї у Засіб попереднього натягу 15 включає в себе напрямку, що позначений стрілкою 5. також силовий засіб 21 для притискання перших Балка 2 має першу 6 та другу 7 базові поверх16 та други х 17 притискних роликів до відповідних ні, що розміщені у площинах, які одна до одної замикаючих поверхонь 8, 9. Силовий засіб змонрозміщені під кутом 90 кутових градусів, а також тований між рамою 14 каретки 4 та плаваючою першу 8 та другу 9 замикаючі поверхні, які розмірамою 19 і включає в себе, щонайменше, по одщені у площинах, що паралельні відповідно перному першому 22 та другому 23 силовому елеменшій б та др угій 7 базовим поверхням. ту, які пристосовані для створення зусиль у наКаретка 4 має першу та др угу групи напрямних прямках перпендикулярно відповідно першій 8 та елементів, наприклад, кочення, виконаних у видругій 9 замикаючим поверхням. Кількість силових гляді роликів. Перша група напрямних роликів елементів 22, 23 неістотна, важливим є тільки ве 9 85672 10 личина та положення відповідних сумарних зусиль поперечному перерізі розміщені по вершинам кваY, X. Силові елементи 22, 23 можуть бути виконані драта чи іншого прямокутника і можуть бути зв'япневматичного, гідравлічного або, як це показано зані між собою поперечними елементами 37 з на кресленнях, пружинного типу. Величина зусилутворенням чотирьохгранної решітчастої металоля кожного пружинного силового елемента 22, 23 конструкції. Очевидно, що така металоконструкція може бути відрегульована за допомогою гвинта може бути замінена порожнистою трьохгранною 24. призматичною металоконструкцією, наприклад, Можливі інші варіанти виконання напрямної напрямною балкою 2 (Фіг.2) або напрямною конссистеми за цим винаходом. Наприклад, другий трукцією 1, виконаною із двох прокатних швелерів варіант за Фіг.4 від першого варіанту за Фіг.2-3 38 (Фіг.7). У четвертому та п'ятому варіантах навідрізняється тим, що напрямна конструкція 1 випрямної системи за Фіг.6 та 7 засіб попереднього конана у вигляді порожнистої напрямної балки 25 натягу 15 виконаний так, як це описано для першотрапецієвидного поперечного перерізу, яка має го варіанту за Фіг.2-3. тільки одну замикаючу поверхню 26, що розміщеУ будь-якому із описаних вище варіантів викона під гострими кутами до першої 6 та другої 7 нання напрямної системи будь-який напрямний базових поверхонь. Три перших 10 та два других або притискний елемент кочення (10, 11, 16, 17, 11 напрямних роликів, розміщені аналогічно тому, 28) може бути виконаний у вигляді балансиру 39 з як це описано для першого варіанту за Фіг.2-3, але двома роликами 40 або у вигляді балансиру 41 із вони можуть бути змонтовані безпосередньо на трьома роликами 40 розміщеними по вершинам рамі 27 каретки 4 без використання проміжної ратрикутника "fgh". Причому балансир 39 змонтовами 13. Засіб попереднього натягу 15 включає в ний за допомогою циліндричного шарніру 42, а себе один притискний елемент кочення 28, який балансир 41 - сферичного шарніру 43 або іншого виконаний у вигляді одного ролика 28 або групи шарніру, який забезпечує можливість повороту притискних роликів, змонтованих на плаваючій навколо двох взаємно перпендикулярних геометрамі 29. Засіб попереднього натягу 15 включає в ричних осей. Конструктивні осі циліндричного 42 себе також силовий засіб 21 для притискання одта сферичного 43 шарнірів закріплюють аналогічно ного або декількох притискних роликів до замикаосям 12, 18 напрямних та притискних роликів 10, ючої поверхні 26. Силовий засіб змонтований між 11, 16, 17, 28 (Фіг.2, 3). Очевидно, що балансир 41 рамою 27 каретки 4 та плаваючою рамою 29 і виіз трьома роликами 40 може бути замінений елеконаний у вигляді одного силового елемента, який ментом ковзання у вигляді повзуна 44, який монза конструкцією ідентичний силовому елементу 22 тують аналогічним чином за допомогою сферичночи 23 і пристосований для створення зусилля у го шарніру 43. Необхідно підкреслити, що у разі напрямку перпендикулярно замикаючій поверхні виконання напрямних елементів кочення у вигляді 26. Положення замикаючої поверхні 26 та притисбалансирів 39, 41 або у разі виконання напрямних кного елемента кочення 28 вибирають такими, елементів ковзання у вигляді повзунів зазначені щоб забезпечити необхідні співвідношення між умовні опорні точки "a", "b", "c", "d", "e", які визнавеличинами зусиль попереднього натягу Ra, Rb, чають опорні контури каретки 4 на базові поверхні Rc, Rd та Re . 6, 7 (трикутник "abc" та відрізок прямої Lde) є геоТретій варіант за Фіг.5 від другого варіанту за метричними центрами зазначених шарнірів 42, 43, Фіг.4 відрізняється тільки конструктивним виконантобто точками прикладення зусиль попереднього ням напрямної конструкції 1, яка виконана із трьох натягу Ra, Rb, Rc, Rd та Re. поздовжніх тр убчасти х елементів 30, 31 та 32, які у Напрямну систему застосовують, наприклад, у поперечному перерізі розміщені по вершинам трикаменеобробному верстаті (Фіг.1) наступним чикутника і можуть бути зв'язані між собою попереном. чними елементами 33, 34 та 35 з утворенням Оброблювальний матеріал розміщується на трьохгранної решітчастої металоконструкції. Очестолі 45, інструмент 46, яким проводиться обробвидно, що така металоконструкція може бути заміка, установлюється у шпиндельній головці верстанена порожнистою трьохгранною призматичною та. При переміщенні каретки 4 зі шпиндельною металоконструкцією. Перша базова поверхня 6 головкою вздовж напрямної конструкції 1, 2, 25 представляє із себе дві бігові доріжки для трьох інструмент 46 стикається з матеріалом та обробперших напрямних роликів 10, які виконані на ниляє його. жніх поздовжніх елементах 30, 31, наприклад, Висока точність обробки матеріалу забезпечушляхом механічної обробки їх зовнішніх поверється за рахунок безлюфтового переміщення кахонь. Друга базова поверхня 7 представляє із себе ретки 4 по напрямній конструкції 1, 2, 25. Безлюфодну бігову доріжку для двох други х напрямних тове переміщення каретки 4 забезпечується за роликів 10, яка виконана на лівому нижньому порахунок гарантованого постійного обпирання усіх здовжньому елементі 30 наприклад, також шляхом п'яти напрямних роликів 10, 11, 40 або повзунів 44 механічної обробки. Замикаюча поверхню 26 на базові поверхні 6, 7 напрямної конструкції 1, 2, представляє із себе одну бігову доріжку для при25 за умови, що величина кожного із робочих зутискного елемента кочення 28, яка виконана на силь Qa, Q b, Qc, Q d та Qe , які спрямовані протилеверхньому поздовжньому елементі 32 без будьжно відповідним зусиллям попереднього натягу якої механічної обробки, оскільки точність її форми Ra, Rb, Rc, Rd та Re, буде меншою величини відпоне впливає на точність позиціювання каретки 4. відного зусилля попереднього натягу. Причому Четвертий варіант за Фіг.6 характеризується виключається можливість заклинювання каретки 4 тим, що напрямна конструкція 1 виконана із чотина напрямній конструкції та забезпечується плаврьох поздовжніх трубчасти х елементів 36, які у ність переміщення каретки, навіть при наявності 11 85672 12 певних неточностей форми та розмірів напрямної hc - висота трикутника "abc" опущена із його конструкції. вершини "с" на його протилежну сторону "ab"; Напрямна система здатна сприймати достатRa,Rb,Rc - зусилля попереднього натягу, що ньо великий за величиною крутий момент Мкр, прикладені у відповідних умовних опорних точках який намагається повернути каретку 4 навколо (вершинах трикутника "abc") "a", "b", "с". поздовжньої вісі 47 напрямної конструкції 1, 2, 25 Величину зусиль попереднього натягу Ra , Rb , та виникає внаслідок розташування інструменту 46 Rc, Rd та Re та співвідношення між цими зусиллязбоку від поздовжньої вісі 47 напрямної конструкми регулюють за допомогою гвинтів 24, змінюючи ції. Величина максимального допустимого крутнонеобхідним чином величину сумарних зусиль Y, X (Фіг.2) відповідно до робочих зусиль Qa, Qb, Qc , Qd, max визначається із системи матего моменту Mкр Qe. матичних виразів Mmax £ h c ·R c , та Mmax £ h c ·(R a + R b ) , де кр кр 13 Комп’ютерна в ерстка В. Мацело 85672 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGuide system
Автори англійськоюKostiuk Oleksandr Ivanovych
Назва патенту російськоюНаправляющая система
Автори російськоюКостюк Александр Иванович
МПК / Мітки
МПК: F16C 29/00
Код посилання
<a href="https://ua.patents.su/7-85672-napryamna-sistema.html" target="_blank" rel="follow" title="База патентів України">Напрямна система</a>
Лінійна напрямна кочення
Номер патенту: 22437
Опубліковано: 25.04.2007
Автори: Тарабрін Олександр Іванович, Чередніченко Олександр Костянтинович, Чередніченко Тетяна Миколаївна
МПК: F16C 29/04
Мітки: лінійна, напрямна, кочення
Формула / Реферат:
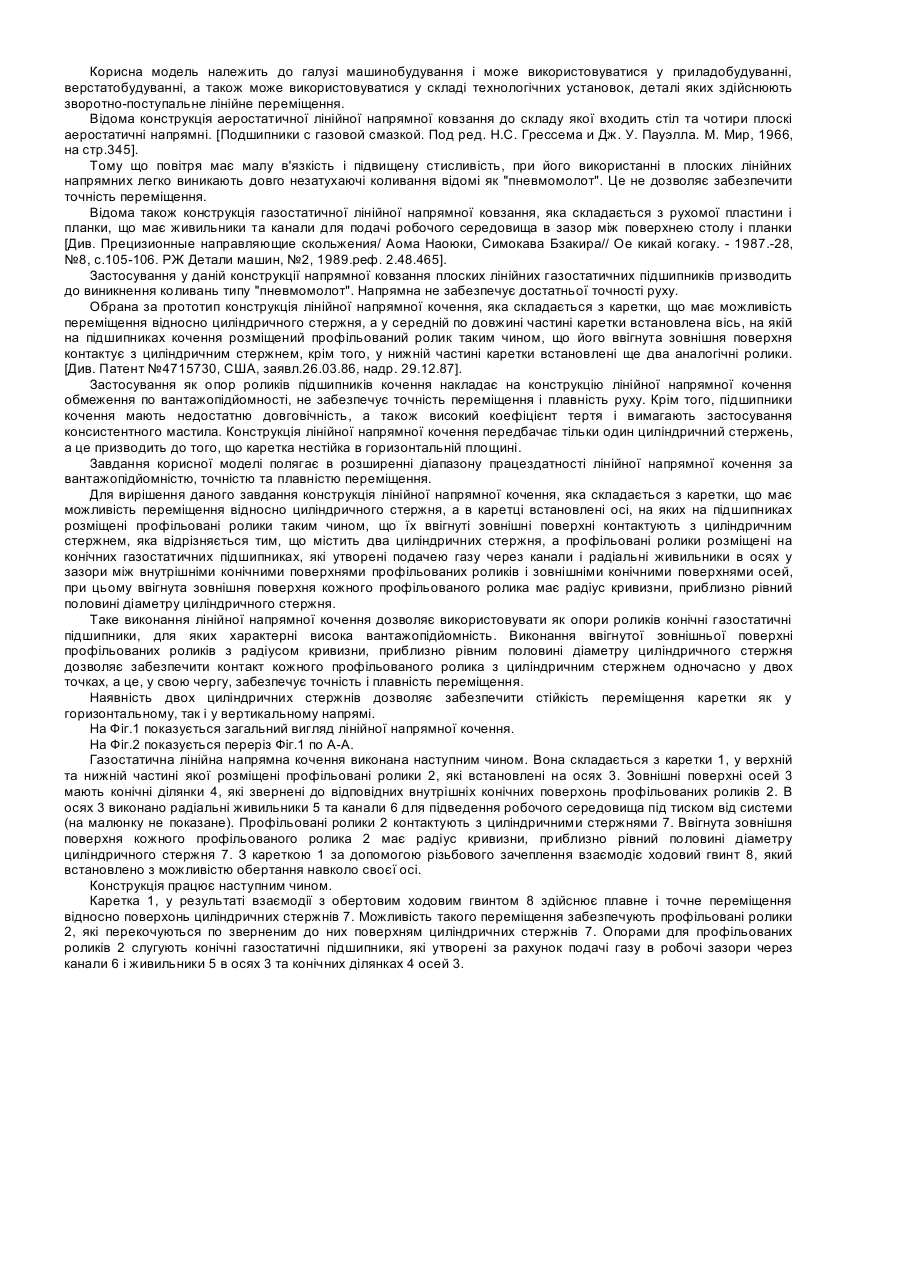
Лінійна напрямна кочення, яка складається з каретки, що має можливість переміщення відносно циліндричного стержня, а в каретці встановлені осі, на яких на підшипниках розміщені профільовані ролики таким чином, що їх ввігнуті зовнішні поверхні контактують з циліндричним стержнем, яка відрізняється тим, що містить два циліндричні стержні, а профільовані ролики розміщені на конічних газостатичних підшипниках, які утворені подачею газу через...
Лінійна напрямна кочення
Номер патенту: 22531
Опубліковано: 25.04.2007
Автори: Чередніченко Тетяна Миколаївна, Чередніченко Олександр Костянтинович, Тарабрін Олександр Іванович
МПК: F16C 29/04
Мітки: напрямна, кочення, лінійна
Формула / Реферат:
Лінійна напрямна кочення, що містить каретку зі встановленими в ній осями, на яких розміщені ролики з зовнішніми кільцями спеціального профілю і рейки з подовжніми ребрами V-подібного профілю, яка відрізняється тим, що ролики розміщені на конічних газостатичних підшипниках, які утворені подачею газу через канали і радіальні живильники в осях у зазори між внутрішніми конічними поверхнями роликів і зовнішніми конічними поверхнями осей.
Напрямна рейка для системи розсувних дверей
Номер патенту: 662
Опубліковано: 16.10.2000
Автор: Бех Артур Васильович
МПК: E06B 3/32
Мітки: напрямна, розсувних, системі, рейка, дверей
Формула / Реферат:
1. Напрямна рейка для системи розсувних дверей, яка має щонайменше одну робочу поверхню для кочення ролика з засобами для спрямування його руху, яка відрізняється тим, що засіб для спрямування руху ролика виконано у вигляді виступу, що розташований приблизно посередині вказаної робочої поверхні рейки.2. Напрямна рейка за п. 1, яка відрізняється тим, що верхня частина вказаного виступу має округлену форму.3. Напрямна рейка за...
Газостатична лінійна напрямна кочення
Номер патенту: 18382
Опубліковано: 15.11.2006
Автори: Тарабрін Олександр Іванович, Чередніченко Тетяна Миколаївна, Чередніченко Олександр Констянтинович
МПК: F16C 29/04
Мітки: лінійна, напрямна, кочення, газостатична
Формула / Реферат:
Газостатична лінійна напрямна кочення, що містить напрямну планку, поперечний переріз якої має форму ластівчина хвоста, причому планка прикріплена до нерухомої станини, а також рухому пластину, яка має напрямні рейки з встановленими в них на осях роликами, що контактують зовнішніми поверхнями кілець з бічними поверхнями напрямної планки, причому подібні ролики, також обернені зовнішніми поверхнями кілець до верхньої поверхні напрямної...
Напрямна для струга, зокрема похила напрямна для струга
Номер патенту: 27518
Опубліковано: 12.11.2007
Автори: Хессе Норберт, Дунке Клаус, Клабіш Адам, Зіпенкорт Герхард
МПК: E21C 27/32, E21C 35/12
Мітки: напрямна, похила, струга, зокрема
Формула / Реферат:
1. Напрямна для добувного струга, зокрема похила напрямна для струга ковзання, яка містить кутиковий сталевий лист (5), одна полиця (6) якого утворює поверхню ковзання струга, а інша, спрямована вверх полиця (5) якого виконана з можливістю розташування або розташована на секції жолоба конвеєра, щонайменше один розпірний елемент (11) ковзання, який над поверхнею ковзання струга відділяє верхній канал (25) для тягового ланцюга струга від...
Попередній патент: Спосіб спорожнення м’якої тари, що містить в’язкий продукт, і комплект для його здійснення
Наступний патент: Спосіб опто-термомеханічного впливу на біологічну тканину і пристрій для його здійснення
Випадковий патент: Пристрій керування безконтактним двигуном