Лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу
Номер патенту: 86609
Опубліковано: 10.01.2014
Автори: Орлов Сергій Володимирович, Клівець Сергій Іванович, Коваль Володимир Валерійович, Балабуха Олексій Сергійович, Копилов Олександр Олексійович, Альошин Геннадій Васильович, Подорожняк Андрій Олексійович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Толстолузька Олена Геннадіївна
Формула / Реферат
Лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу, яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута a і місця b, кутових швидкостей a' і b' та інформаційний блок з розширеними можливостями, яка відрізняється тим, що додатково введено електронну обчислювальну машину.
Текст
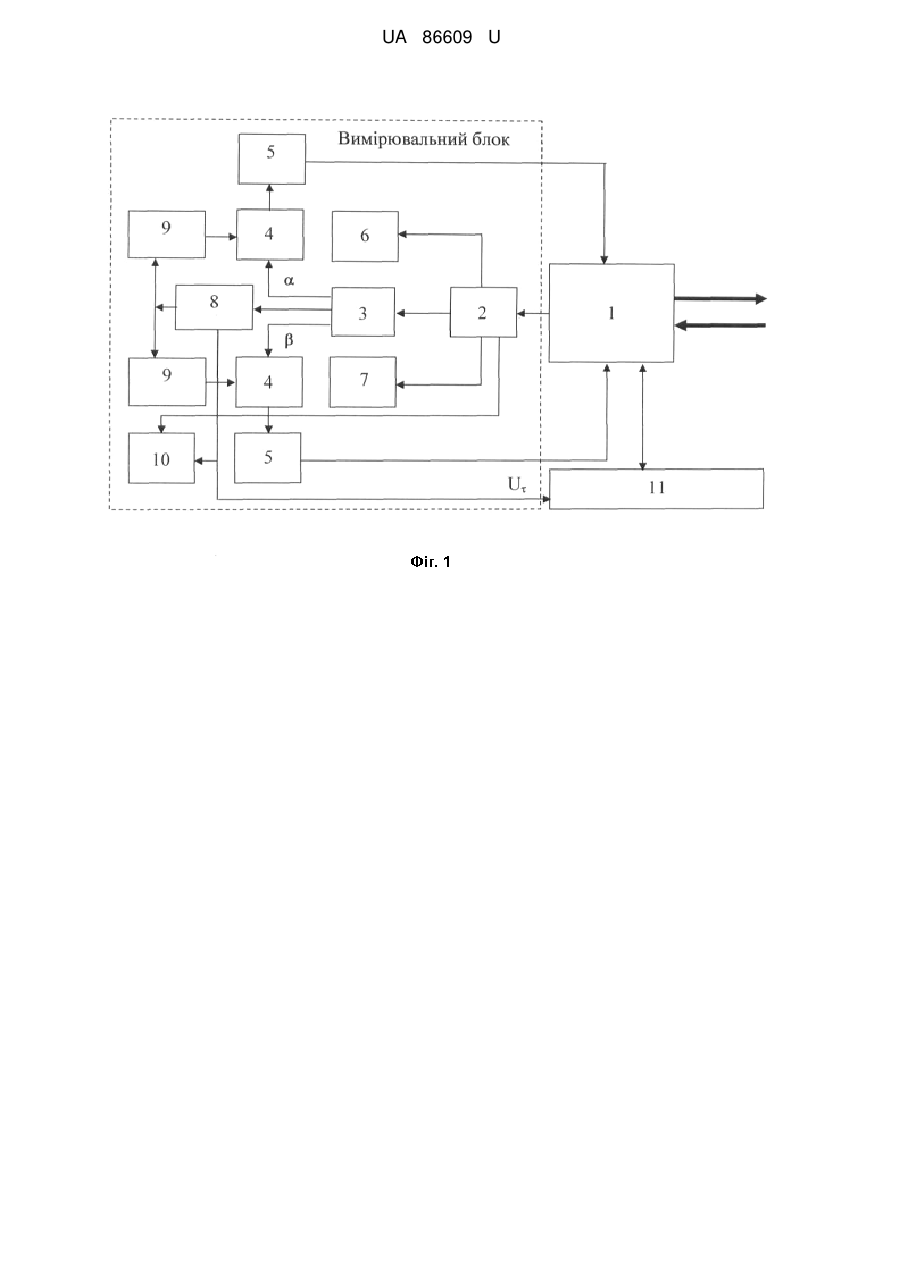
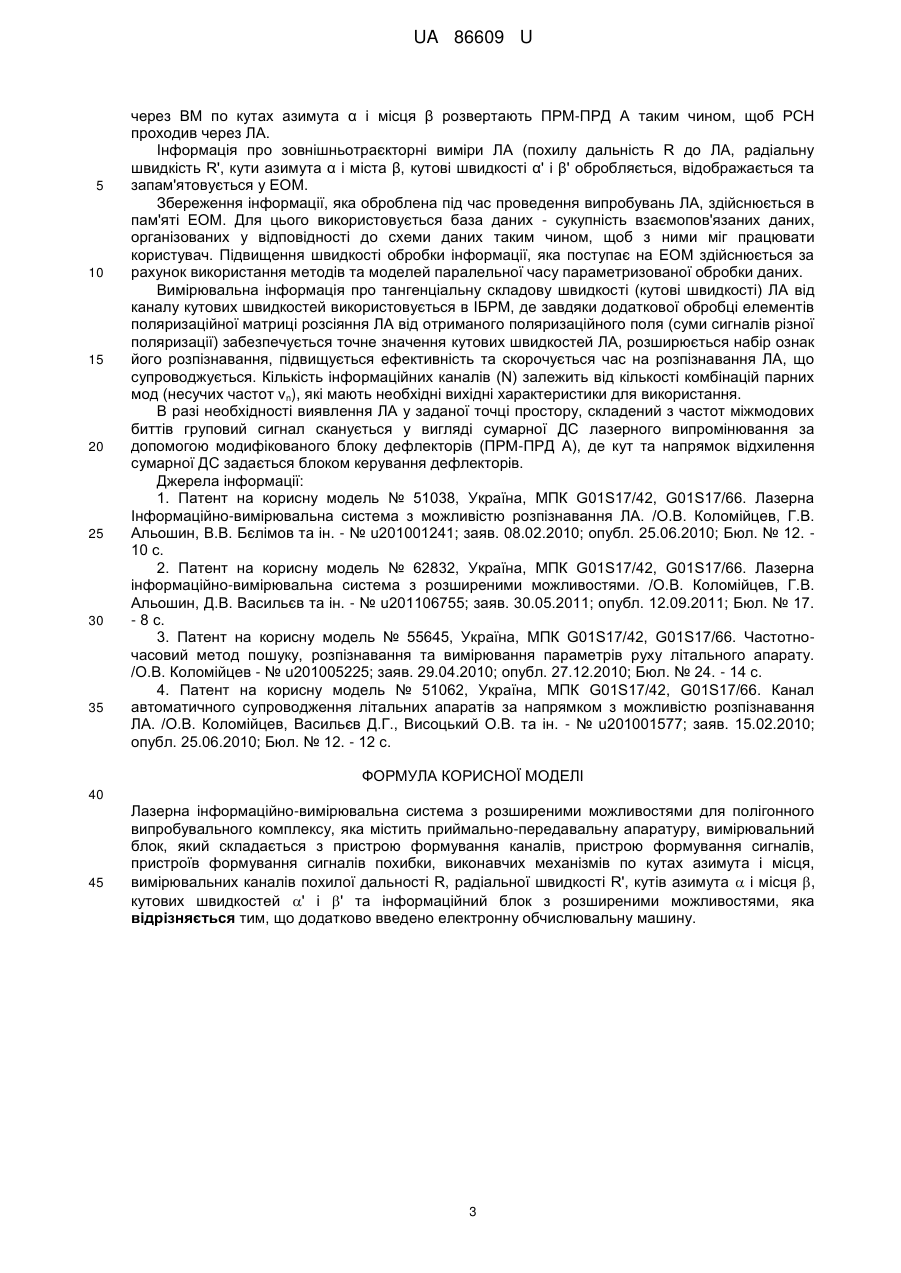
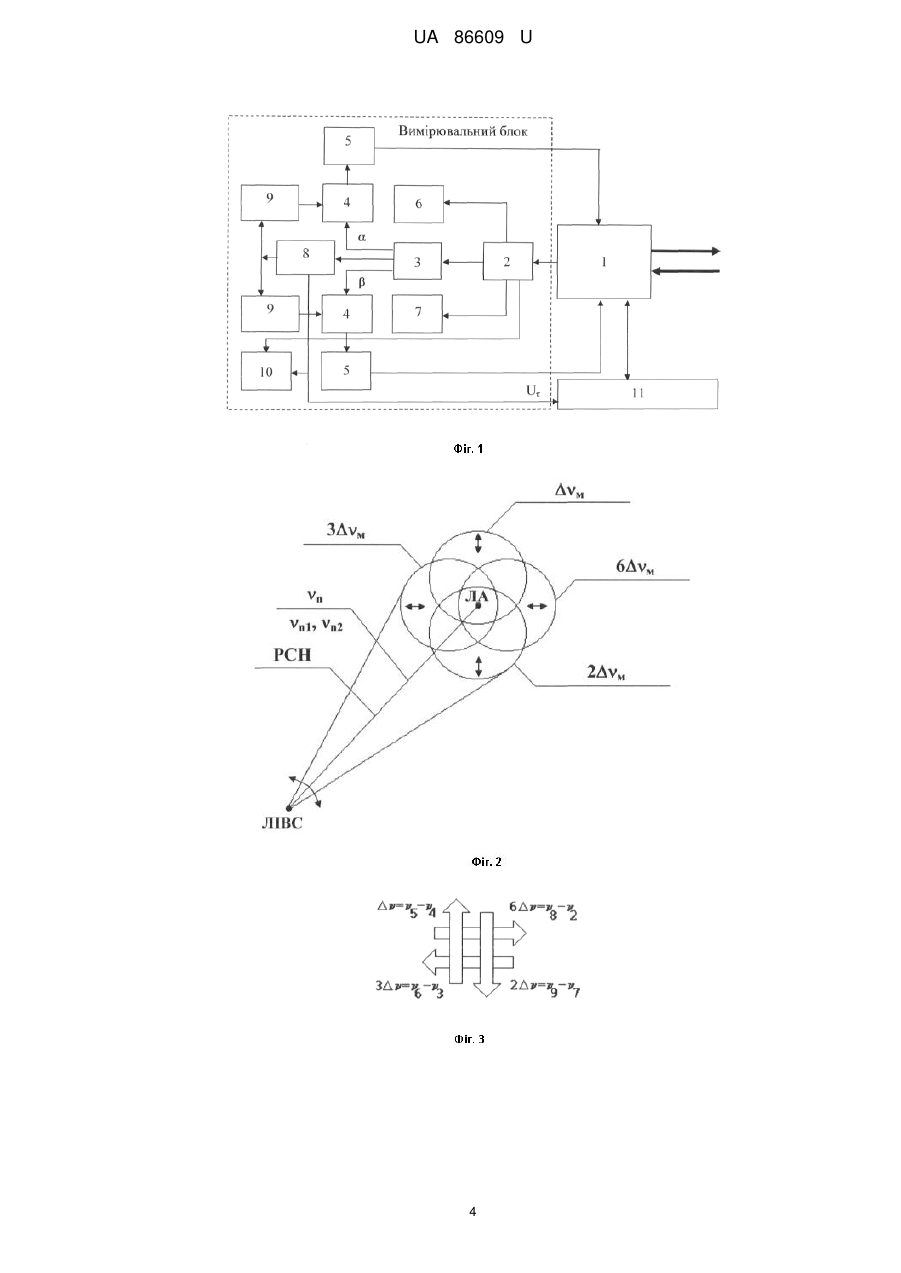
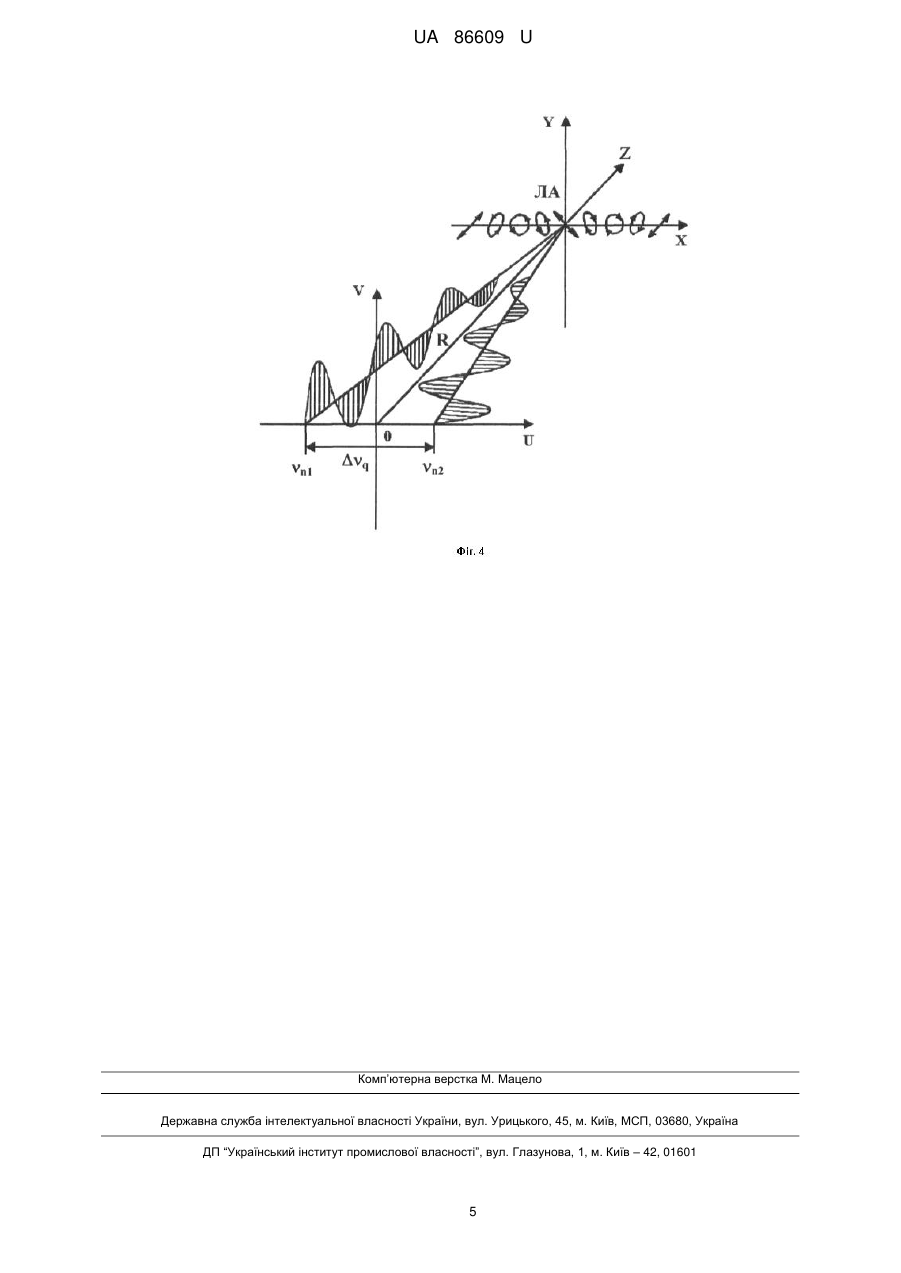
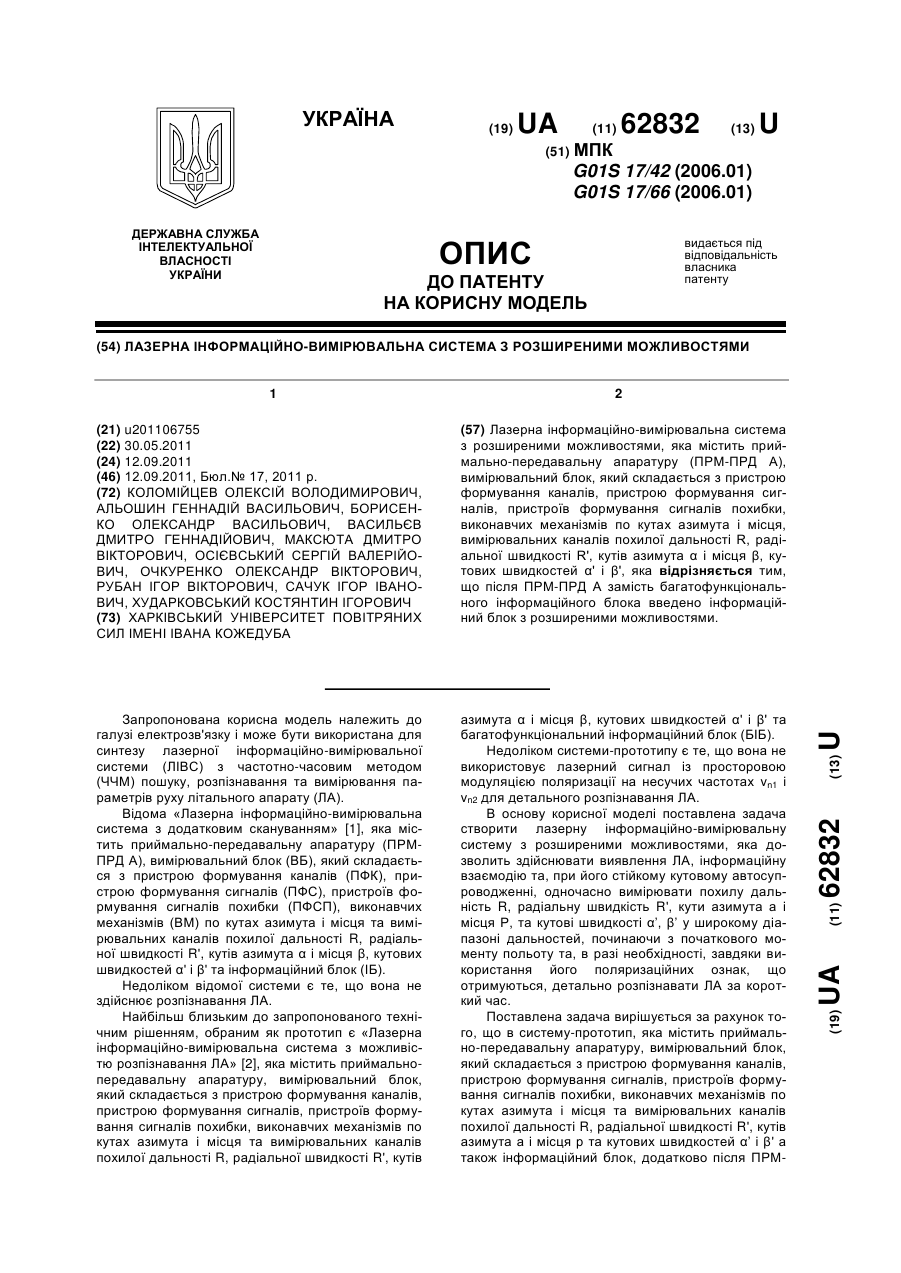
Реферат: Лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і ' та інформаційний блок з розширеними можливостями. Додатково введено електронну обчислювальну машину. UA 86609 U (12) UA 86609 U UA 86609 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електрозв'язку і може бути використана для синтезу шестипараметричної лазерної інформаційно-вимірювальної системи (ЛІВС) з частотно-часовим методом (ЧЧМ) пошуку, розпізнавання та вимірювання параметрів руху літального апарата (ЛА). Відома "Лазерна інформаційно-вимірювальна система з можливістю розпізнавання ЛА" [1], яка містить приймально-передавальну апаратуру (ПРМ-ПРД А), вимірювальний блок (ВБ), який складається з пристрою формування каналів (ПФК), пристрою формування сигналів (ПФС), пристроїв формування сигналів похибки (ПФСП), виконавчих механізмів (ВМ) по кутах азимута і місця, вимірювальних каналів похилої дальності R і радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α' і β' та багатофункціональний інформаційний блок (БІБ). Недоліком відомої системи є те, що вона не використовує лазерний сигнал із просторовою модуляцією поляризації на несучих частотах νn1 і νn2 для детального розпізнавання ЛА. Найбільш близьким аналогом є "Лазерна інформаційно-вимірювальна система з розширеними можливостями" [2], яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, та вимірювальних каналів похилої дальності R і радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α' і β' та інформаційний блок з розширеними можливостями (ІБРМ). Недоліком системи-аналога є те, що вона не забезпечує збереження інформації, яка оброблена під час проведення випробувань ЛА. В основу корисної моделі поставлена задача створити лазерну інформаційно-вимірювальну систему з розширеними можливостями для полігонного випробувального комплексу, яка дозволить здійснювати виявлення ЛА, видачу команд керування (інформаційну взаємодію) та, при його стійкому кутовому автосупроводженні, одночасно вимірювати похилу дальність R до ЛА, радіальну швидкість R', кути азимута α і місця β, кутові швидкості α', β' у широкому діапазоні дальностей, починаючи з початкового моменту польоту, збереження інформації, яка оброблена під час проведення випробувань ЛА та, в разі необхідності, завдяки використанню його поляризаційних ознак, що отримуються, детально розпізнавати ЛА за короткий час. Поставлена задача вирішується за рахунок того, що в систему-аналог, яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β' та інформаційний блок з розширеними можливостями, додатково введено електронну обчислювальну машину (ЕОМ). Побудова лазерної інформаційно-вимірювальної системи з розширеними можливостями для полігонного випробувального комплексу пов'язана з використанням одномодового багаточастотного з синхронізацією подовжніх мод випромінювання єдиного лазера-передавача та ЧЧМ [3]. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у виявленні ЛА, високоточному вимірюванні похилої дальності R, радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α' і β' у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, стійкому багатоканальному (N) інформаційному взаємозв'язку з ним на несучих частотах, збереженні інформації, яка оброблена під час проведення випробувань ЛА та розширенні набору поляризаційних ознак розпізнавання ЛА, що отримуються, підвищенні ефективності і скороченні часу на його розпізнавання. Суть корисної моделі пояснюється кресленням, де на фіг. 1 приведена узагальнена структурна схема запропонованої ЛІВС; на фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування сумарною діаграмою спрямованості (ДС) лазерного випромінювання у невеликому куті і окремо 4 ДС в ортогональних площинах; на фіг. 3 приведено зустрічне сканування пар парціальних ДС у кожній з двох ортогональних площин; на фіг. 4 приведено створення лазерного сигналу з просторовою модуляцією поляризації. Запропонована лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу містить приймально-передавальну апаратуру (1), вимірювальний блок, який складається з пристрою формування каналів (2), пристрою формування сигналів (3), пристроїв формування сигналів похибки (4), виконавчих механізмів по кутах азимута і місця (5), вимірювальних каналів похилої дальності R (6), радіальної швидкості R' (7), кутів азимута β і місця β (8) та кутових швидкостей α' і β' (9), електронну обчислювальну машину (10) та інформаційний блок з розширеними можливостями (11). 1 UA 86609 U 5 10 15 20 25 30 35 40 45 50 55 60 Робота лазерної інформаційно-вимірювальної системи з розширеними можливостями для полігонного випробувального комплексу полягає у наступному. Зі спектру випромінювання одномодового багаточастотного з синхронізацією подовжніх мод лазера-передавача (Лн) за допомогою модифікованого селектору подовжніх мод (МСПМ) [4], виділяються необхідні моди та їх комбінації для створення: - РСН на основі формування сумарної ДС лазерного випромінювання, завдяки 4 парціальним діаграмам спрямованості, що частково перетинаються, за умови використання комбінацій подовжніх мод ("підфарбованих" різницевими частотами міжмодових биттів, фіг. 2): Δν54=ν5-ν4=Δνм, Δν97=ν9-ν7=2Δνм, Δν63=ν6-ν3=3Δνм, Δν82=ν8-ν2=6Δνм. - багатоканального (N) інформаційного зв'язку, за умови використання сигналу подовжніх мод (на несучих частотах νn); - лазерного сигналу з просторовою модуляцією поляризації, за умови використання сигналу з двох подовжніх мод (несучих частот νn1 і νn2). За допомогою МСПМ та ІБРМ створюється лазерний сигнал з просторовою модуляцією поляризації шляхом створення лазерного випромінювання з двох несучих частот (νn1 і νn2) у вигляді двох променів з вертикальною (νn1) та горизонтальною (νn2) поляризацією (фіг. 4). При цьому випромінювання апертури першого і другого поляризаційних каналів в апертурної плоскості V0U рознесені на відомій відстані Δνq. Різність ходу пучків до картинної плоскості ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз (амплітуд) між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз (амплітуд) у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами Δνq та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції та дорівнює значенню ступеня поляризації випромінювання, що відбито в даній ділянці поверхні ЛА. Створення РСН, яке проходить через ЛА, дозволяє сформувати багатоканальний (N) інформаційний зв'язок між ПРМ-ПРД А ЛIВС та ПРМ-ПРД А ЛА. Сигнали зв'язку на несучих частотах (Nνn) та лазерний сигнал з просторовою модуляцією поляризації (νn1 і νn2) від ІБРМ через ПРМ-ПРД А ЛІВС проходять повздовж РСН (фіг. 2) та приймаються ПРМ-ПРД А ЛА і у зворотному чині, чим забезпечують його детальне розпізнавання та передачу команд керування від ЛІВС до ЛА. При відбитті лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо, що відображається в ЕОМ. Тому у ІБРМ також здійснюється поляризаційна обробка поля, що приймається. Зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин (фіг. 3), призводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування (похибки по кутах), а також до зміни тривалостей огинаючих пачок імпульсів частот міжмодових биттів за неповний прохід ДС у прямому або зворотному напрямку сканування відбитого сигналу від ЛА (похибки по кутових швидкостях), який приймається ПРМ-ПРД А. ПФК розподіляє сигнали похибок по вимірювальних каналах. Зустрічне сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин дозволяє вимірювати як похилу дальність до ЛА по запізнюванню частот міжмодових биттів каналом R, так і його радіальну швидкість допплерівським методом каналом R', оскільки найкращий режим сканування - при напівперекритті ДС (фіг. 2). У ПФС сигнали, які отримані від зустрічного сканування пар парціальних ДС лазерного випромінювання у кожній з двох ортогональних площин, перетворюються завдяки зрушенням огинаючих періодів пачок імпульсів частот міжмодових биттів у сигнали кутів азимута α і місця β та перетворюються, завдяки зрушенням напівперіодів (тривалостей) огинаючих пачок імпульсів частот міжмодових биттів за один прохід ДС, в одному напрямку сканування (прямому або зворотному), у сигнали кутової (тангенціальної) швидкості ЛА у каналі кутових швидкостей α' і β'. За зрушеннями огинаючих періодів пачок імпульсів частот міжмодових биттів, у пристроях формування сигналів похибки (ПФСП - по кутах азимута α і місця β), формуються сигнали похибки по кутових координатах, що корегуються прогнозованими динамічними похибками, які 2 UA 86609 U 5 10 15 20 25 30 35 через ВМ по кутах азимута α і місця β розвертають ПРМ-ПРД А таким чином, щоб РСН проходив через ЛА. Інформація про зовнішньотраєкторні виміри ЛА (похилу дальність R до ЛА, радіальну швидкість R', кути азимута α і міста β, кутові швидкості α' і β' обробляється, відображається та запам'ятовується у ЕОМ. Збереження інформації, яка оброблена під час проведення випробувань ЛА, здійснюється в пам'яті ЕОМ. Для цього використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка поступає на ЕОМ здійснюється за рахунок використання методів та моделей паралельної часу параметризованої обробки даних. Вимірювальна інформація про тангенціальну складову швидкості (кутові швидкості) ЛА від каналу кутових швидкостей використовується в ІБРМ, де завдяки додаткової обробці елементів поляризаційної матриці розсіяння ЛА від отриманого поляризаційного поля (суми сигналів різної поляризації) забезпечується точне значення кутових швидкостей ЛА, розширюється набір ознак його розпізнавання, підвищується ефективність та скорочується час на розпізнавання ЛА, що супроводжується. Кількість інформаційних каналів (N) залежить від кількості комбінацій парних мод (несучих частот νn), які мають необхідні вихідні характеристики для використання. В разі необхідності виявлення ЛА у заданої точці простору, складений з частот міжмодових биттів груповий сигнал сканується у вигляді сумарної ДС лазерного випромінювання за допомогою модифікованого блоку дефлекторів (ПРМ-ПРД А), де кут та напрямок відхилення сумарної ДС задається блоком керування дефлекторів. Джерела інформації: 1. Патент на корисну модель № 51038, Україна, МПК G01S17/42, G01S17/66. Лазерна Інформаційно-вимірювальна система з можливістю розпізнавання ЛА. /О.В. Коломійцев, Г.В. Альошин, В.В. Бєлімов та ін. - № u201001241; заяв. 08.02.2010; опубл. 25.06.2010; Бюл. № 12. 10 с. 2. Патент на корисну модель № 62832, Україна, МПК G01S17/42, G01S17/66. Лазерна інформаційно-вимірювальна система з розширеними можливостями. /О.В. Коломійцев, Г.В. Альошин, Д.В. Васильєв та ін. - № u201106755; заяв. 30.05.2011; опубл. 12.09.2011; Бюл. № 17. - 8 с. 3. Патент на корисну модель № 55645, Україна, МПК G01S17/42, G01S17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. /О.В. Коломійцев - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. 4. Патент на корисну модель № 51062, Україна, MПК G01S17/42, G01S17/66. Канал автоматичного супроводження літальних апаратів за напрямком з можливістю розпізнавання ЛА. /О.В. Коломійцев, Васильєв Д.Г., Висоцький О.В. та ін. - № u201001577; заяв. 15.02.2010; опубл. 25.06.2010; Бюл. № 12. - 12 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 Лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу, яка містить приймально-передавальну апаратуру, вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута і місця , кутових швидкостей ' і ' та інформаційний блок з розширеними можливостями, яка відрізняється тим, що додатково введено електронну обчислювальну машину. 3 UA 86609 U 4 UA 86609 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюKolomiitsev Oleksii Volodymyrovych, Sachuk Ihor Ivanovych, Alioshyn Hennadii Vasyliovych, Balabukha Oleksii Serhiiovych, Klivets Serhii Ivanovych, Koval Volodymyr Valeriiovych, Kopylov Oleksandr Oleksiiovych, Orlov Sergii Volodymyrovych, Podorozhniak Andrii Oleksiiovych, Tolstoluzska Olena Hennadiivna
Автори російськоюКоломийцев Алексей Владимирович, Сачук Игорь Иванович, Алешин Геннадий Васильевич, Балабуха Алексей Сергеевич, Кливец Сергей Иванович, Коваль Владимир Валериевич, Копылов Александр Алексеевич, Орлов Сергей Владимирович, Подорожняк Андрей Алексеевич, Толстолузская Елена Геннадиевна
МПК / Мітки
МПК: G01S 17/46, G01S 17/42
Мітки: можливостями, інформаційно-вимірювальна, полігонного, лазерна, комплексу, випробувального, система, розширеними
Код посилання
<a href="https://ua.patents.su/7-86609-lazerna-informacijjno-vimiryuvalna-sistema-z-rozshirenimi-mozhlivostyami-dlya-poligonnogo-viprobuvalnogo-kompleksu.html" target="_blank" rel="follow" title="База патентів України">Лазерна інформаційно-вимірювальна система з розширеними можливостями для полігонного випробувального комплексу</a>
Лазерна інформаційно-вимірювальна система з розширеними можливостями
Номер патенту: 62832
Опубліковано: 12.09.2011
Автори: Рубан Ігор Вікторович, Альошин Геннадій Васильович, Сачук Ігор Іванович, Коломійцев Олексій Володимирович, Борисенко Олександр Васильович, Хударковський Костянтин Ігорович, Максюта Дмитро Вікторович, Васильєв Дмитро Геннадійович, Осієвський Сергій Валерійович, Очкуренко Олександр Вікторович
МПК: G01S 17/42, G01S 17/66
Мітки: розширеними, лазерна, можливостями, система, інформаційно-вимірювальна
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з розширеними можливостями, яка містить приймально-передавальну апаратуру (ПРМ-ПРД А), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β, кутових швидкостей α'...
Лазерна вимірювальна система з розширеними можливостями
Номер патенту: 62843
Опубліковано: 12.09.2011
Автори: Альошин Геннадій Васильович, Коломійцев Олексій Володимирович, Ковальчук Андрій Олексійович, Рубан Ігор Вікторович, Хударковський Костянтин Ігорович, Сачук Ігор Іванович, Таршин Володимир Анатолійович, Воробйов Руслан Володимирович, Осієвський Сергій Валерійович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42, G01S 17/66
Мітки: вимірювальна, можливостями, лазерна, розширеними, система
Формула / Реферат:
Лазерна вимірювальна система з розширеними можливостями, яка містить вимірювальний блок (ВБ), який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця, вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута α і місця β та кутових швидкостей α' і β', яка відрізняється тим, що перед ВБ...
Лазерна інформаційно-вимірювальна система з додатковими можливостями
Номер патенту: 62833
Опубліковано: 12.09.2011
Автори: Сачук Ігор Іванович, Васильєв Дмитро Геннадійович, Луковський Олег Ярославович, Коломійцев Олексій Володимирович, Рубан Ігор Вікторович, Дзігора Олександр Михайлович, Красношапка Ігор Валерійович, Хударковський Костянтин Ігорович, Альошин Геннадій Васильович, Осієвський Сергій Валерійович
МПК: G01S 17/42, G01S 17/66
Мітки: додатковими, інформаційно-вимірювальна, лазерна, можливостями, система
Формула / Реферат:
Лазерна інформаційно-вимірювальна система з додатковими можливостями, яка містить приймач-передавач (ПРМ-ПРД), вимірювальний блок, який складається з пристрою формування каналів, пристрою формування сигналів, пристроїв формування сигналів похибки, виконавчих механізмів по кутах азимута і місця та вимірювальних каналів похилої дальності R, радіальної швидкості R', кутів азимута a і місця b та кутових швидкостей a' і b', яка відрізняється тим,...
Канал вимірювання кутових швидкостей літальних апаратів з розширеними можливостями для лвс полігонного випробувального комплексу
Номер патенту: 75287
Опубліковано: 26.11.2012
Автори: Батурін Олег Володимирович, Храпчинський Василь Олегович, Кожушко Ярослав Миколайович, Сачук Ігор Іванович, Риб'як Анатолій Степанович, Толстолузька Олена Геннадіївна, Орлов Сергій Володимирович, Коломійцев Олексій Володимирович, Васильєв Дмитро Геннадійович, Ольховіков Станіслав Валерійович
МПК: G01S 17/42, G01S 11/00
Мітки: вимірювання, швидкостей, кутових, лвс, можливостями, комплексу, літальних, випробувального, розширеними, канал, апаратів, полігонного
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з розширеними можливостями для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, блок з розширеними можливостями із введенням б, резонансні підсилювачі, настроєні на відповідні...
Канал автоматичного супроводження літальних апаратів за напрямком з розширеними можливостями для лвс полігонного випробувального комплексу
Номер патенту: 75283
Опубліковано: 26.11.2012
Автори: Ольховіков Станіслав Валерійович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Кожушко Ярослав Миколайович, Толстолузька Олена Геннадіївна, Васильєв Дмитро Геннадійович, Батурін Олег Володимирович, Орлов Сергій Володимирович, Храпчинський Василь Олегович, Риб'як Анатолій Степанович
МПК: G01S 17/66, G01S 17/42
Мітки: лвс, автоматичного, можливостями, літальних, напрямком, розширеними, апаратів, полігонного, канал, супроводження, випробувального, комплексу
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з розширеними можливостями для ЛВС полігонного випробувального комплексу, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, блок з розширеними можливостями із введенням б, резонансні підсилювачі, настроєні на...
Попередній патент: Рамка для вулика
Наступний патент: Автоматизоване робоче місце для перевірки психофізіологічних показників військового льотчика
Випадковий патент: Спосіб генерування плазми