Механічний безмуфтовий прес


Формула / Реферат
Механічний безмуфтовий прес, що складається зі станини, кривошипного вала, змонтованого в підшипникових опорах станини і зв'язаного з електродвигуном за допомогою маховика та гнучкого зв'язку, встановленої на шипу кривошипного вала ексцентрикової втулки, яка має ексцентриситет, що дорівнює радіусу кривошипа, і охоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконаний отвір, де розміщено регулювальний гвинт, пружину та фіксатор, напроти якого на зовнішній циліндричній поверхні шипа кривошипного вала виконано заглиблення, повзуна, розташованого у вертикальних напрямних станини і з'єднаного з шатуном та урівноважувачем, а також засобу вмикання преса у вигляді висувного упора, розміщеного в радіальному напрямку і з'єднаного штоком з приводом, який відрізняється тим, що до ексцентрикової втулки жорстко приєднаний рухомий упор з можливістю взаємодії його з висувним упором, величина ходу (S) якого не менша за ширину (А) поверхні рухомого упора, призначеної для контакту з відповідною поверхнею висувного упора, причому між поверхнями контакту упорів розміщений пружний елемент - амортизатор.
Текст
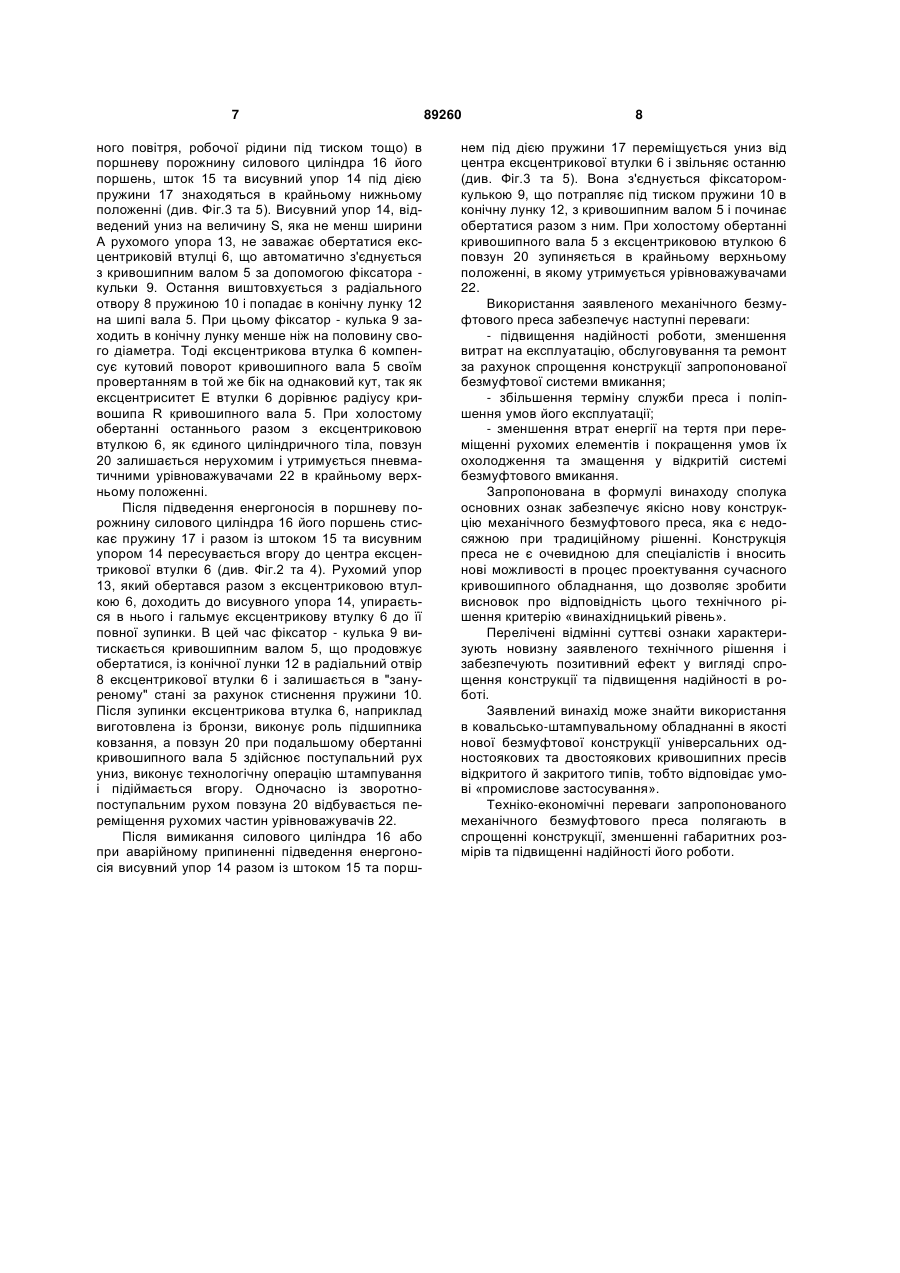
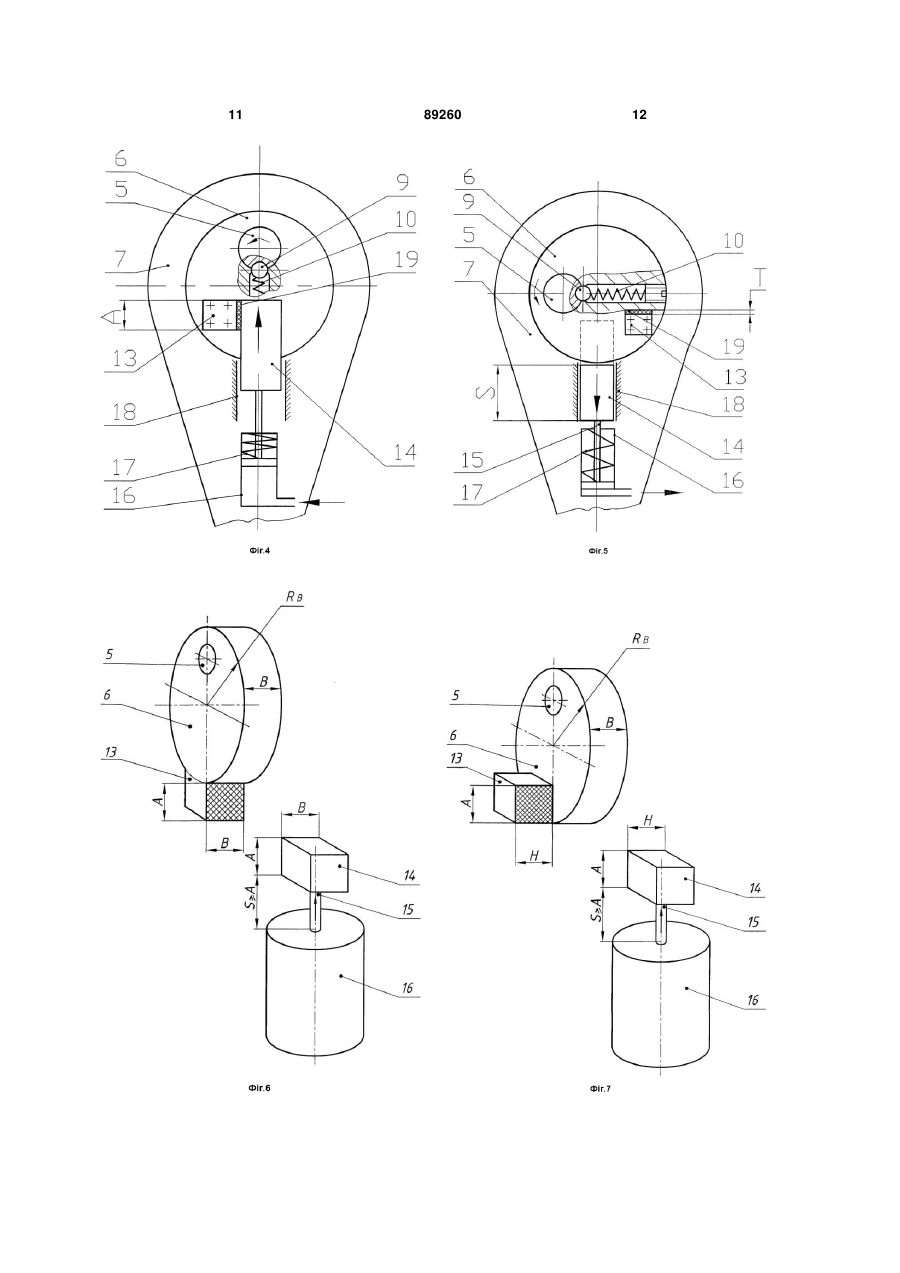
Механічний безмуфтовий прес, що складається зі станини, кривошипного вала, змонтованого в підшипникових опорах станини і зв'язаного з електродвигуном за допомогою маховика та гнучкого зв'язку, встановленої на шипу кривошипного вала C2 1 3 втулку, що встановлена на шипу кривошипного вала, має ексцентриситет, рівний радіусу кривошипа, і охоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, в якому розміщено регулювальний гвинт, пружину та фіксатор, напроти якого в зовнішній циліндричній поверхні шипа кривошипного вала виконано конічну лунку, повзун, розташований у вертикальних напрямних станини і з'єднаний із шатуном, урівноважувач повзуна, а також засіб вмикання преса у вигляді рухомого упора, з'єднаного штоком з приводом і розміщеного в радіальному напрямку з можливістю переміщення в заглиблення, яке виконано на зовнішній циліндричній поверхні ексцентрикової втулки у вигляді паза змінної глибини, який поступово заглиблений від зовнішньої циліндричної поверхні ексцентрикової втулки до торця паза, з яким має контакт кінець висунутого рухомого упора (див. патент України на винахід №61474А, Механічний безмуфтовий прес, МПК В30В 15/00, 2003 рік). Недоліками прототипу є складність конструкції, зумовлена розміщенням безмуфтової системи вмикання відомого механічного преса всередині великої головки шатуна, ненадійність роботи через послаблення ексцентрикової втулки пазом змінної глибини й тіла шатуна поперечним отвором, а також підвищені втрати енергії на тертя між рухомим упором та контактними поверхнями поперечного отвору в шатуні. Крім того, використання в якості приводу силового електромагніту також збільшує втрати енергії, оскільки відомо, що між величиною зусилля електромагніту та значенням струму існує квадратична залежність, тобто при збільшенні зусилля в 2 рази величина струму, а відповідно, втрати енергії і розміри електромагніту, збільшуються в 4 рази. Відомий безмуфтовий механізм вмикання, вмонтований у порожнині великої головки шатуна, є важкодоступним при обслуговуванні, налагодженні та ремонті. Наскрізна порожнина, виконана у великій головці шатуна, значно послаблює міцність останнього, а паз змінної глибини зменшує площу контактної циліндричної поверхні ексцентрикової втулки десь на 25%, що збільшує приблизно на чверть контактні напруження на поверхні контакту між втулкою та внутрішнім отвором у великій головці шатуна під час робочого ходу повзуна і погіршує умови центрування цих деталей одна відносно одної. Все це зменшує надійність роботи відомого преса. Таким чином, відомий прес має складну і недостатньо надійну конструкцію безмуфтової системи вмикання, характеризується значними втратами енергії на тертя рухомих елементів. В основу винаходу поставлено задачу спрощення конструкції безмуфтової системи вмикання механічного преса та підвищення надійності його роботи. Поставлена задача досягається тим, що у відомому пресі, що складається зі станини, кривошипного вала, змонтованого в підшипникових опорах станини і зв'язаного з електродвигуном за допомогою маховика та гнучкого зв'язку, встановленої на шипу кривошипного вала ексцентрикової втулки, яка має ексцентриситет, що дорівнює раді 89260 4 усу кривошипа, і охоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконаний отвір, де розміщено регулювальний гвинт, пружину та фіксатор, напроти якого на зовнішній циліндричній поверхні шипа кривошипного вала виконано заглиблення, повзуна, розташованого у вертикальних напрямних станини і з'єднаного з шатуном та урівноважувачем, а також засобу вмикання преса у вигляді висувного упора, розміщеного в радіальному напрямку і з'єднаного штоком з приводом, згідно винаходу, до ексцентрикової втулки прикріплений рухомий упор з можливістю взаємодії його з висувним упором, величина ходу якого не менша за ширину рухомого упора, і між поверхнями контакту упорів розміщений пружний елемент - амортизатор. Характер удосконалення, як виходить із формули винаходу, полягає в змінюванні конструкції та розміщення рухомого й висувного упорів, ексцентрикової втулки і шатуна. Перший прикріплено до зовнішньої циліндричної або торцевої поверхні ексцентрикової втулки напроти висувного упора, а останній розміщено зовні на поверхні шатуна з можливістю переміщення уздовж його поздовжньої осі, виконано у вигляді призматичного тіла з прямокутним поперечним перерізом і з'єднано штоком з приводом. Між поверхнями контакту упорів встановлено пружний елемент - амортизатор, який може бути прикріпленим до контактної поверхні рухомого чи висувного упорів. Сполука ознак, що пропонується в формулі винаходу, забезпечує отримання нового, невідомого раніше ефекту у вигляді нової конструкції механічного безмуфтового преса, який має підвищену надійність в роботі за рахунок спрощення конструкції та зменшення втрат енергії на тертя при переміщенні рухомих елементів у системі його вмикання. Винахід пояснюється кресленнями, де на Фіг.1 зображено загальний вигляд запропонованого механічного безмуфтового преса, на Фіг.2 показано велику головку шатуна з рухомим упором, що виступає за зовнішню циліндричну поверхню ексцентрикової втулки, при робочому ході повзуна преса, а на Фіг.3 - при холостому обертанні приводу і нерухомому повзуні. На Фіг.4 наведено велику головку шатуна заявленого преса з рухомим упором, що виступає над плоскою торцевою поверхнею ексцентрикової втулки, при робочому ході повзуна преса, а на Фіг.5 - при холостому обертанні приводу і нерухомому повзуні. На Фіг.6 зображено схему розміщення рухомого та висувного упорів перед зупинкою ексцентрикової втулки і початком робочого ходу повзуна преса, коли рухомий упор виступає за зовнішню циліндричну поверхню втулки на величину А, а на Фіг.7 - коли рухомий упор вище плоскої торцевої поверхні ексцентрикової втулки на величину Н. Механічний безмуфтовий прес (див. Фіг.1) складається із станини 1, на якій встановлено електродвигун 2, що зв'язано гнучким зв'язком 3, наприклад клинопасовою передачею, з маховиком 4. Маховик 4 жорстко з'єднано з кривошипним валом 5, який змонтовано в підшипникових опорах (на схемах умовно не зображені) станини 1. На шипу 5 кривошипного вала 5 розміщено ексцентрикову втулку 6, яка по зовнішній циліндричній поверхні охоплюється великою головкою шатуна 7. При цьому ексцентриситет Е втулки 6 дорівнює радіусу R кривошипа. В тілі ексцентрикової втулки 6 в радіальному напрямку розміщено отвір 8, в якому встановлено фіксатор 9, наприклад виконаний у вигляді кульки, пружину стискання 10 та регулювальний гвинт 11, що призначено для опори пружини 10 і регулювання величини її стиснення. На циліндричній поверхні шипа кривошипного вала 5 напроти фіксатора 9 виконано заглиблення 12, наприклад конічної, сферичної, циліндричної, пірамідальної або іншої форми, яка відповідає формі західної частини фіксатора 9. Рухомий упор 13, наприклад призматичної форми, прикріплено до циліндричної бокової поверхні ексцентрикової втулки 6 (див. Фіг.2) або до її плоскої торцевої поверхні (див. Фіг.4). В першому випадку рухомий упор 13 може виступати за зовнішню циліндричну поверхню втулки 6 на величину А (див. Фіг.6), а в другому - бути вище плоскої торцевої поверхні ексцентрикової втулки 6 на величину Н (див. Фіг.7), які дорівнюють відповідним розмірам висувного упора 14. Можливо виконання рухомого упора 13 за одне суцільне з ексцентриковою втулкою 6. Висувний упор 14, наприклад призматичної форми, розміщено на зовнішній поверхні шатуна 7 і з'єднано штоком 15 з приводом, наприклад силовим циліндром 16 пневматичного або гідравлічного типу, в штоковій порожнині якого встановлено потужну пружину стискання 17. Висувний упор 14 встановлено по ковзній посадці в напрямних планках 18, прикріплених до зовнішньої поверхні шатуна 7, з можливістю переміщення уздовж його поздовжньої осі. Величина ходу висувного упора 14 має бути не менша за ширину А рухомого упора 13 (див. Фіг.6 та 7). Між поверхнями контакту упорів розміщено пружний елемент - амортизатор 19 товщиною Т (див. Фіг.3 та 5), наприклад, у вигляді пружини, шару гуми, поліуретану, ретинаксу тощо, який може бути прикріплено до контактних поверхонь рухомого або висувного упорів 13, 14, відповідно. Повзун 20 розташовано у вертикальних напрямних станини 1 і з'єднано з тілом шатуна 7 через гвинт 21, а також з урівноважувачами 22 повзуна, наприклад пневматичного типу. При обертанні ексцентрикової втулки 6 разом з кривошипним валом 5 (див. Фіг.6) вона накопичує певну кінетичну енергію W, яка після удару рухомого упора 13 по висувному упору 14 практично уся переходить в роботу А Д пружної деформації контактних поверхонь упорів. Величина накопиченої кінетичної енергії залежить від моменту інерції І ексцентрикової втулки 6 і квадрата кутової швидкості її обертання з приводом від кривошипного вала 5 I 2 Wk 2 Момент інерції ексцентрикової втулки 6 дорівнює m R2 R4 B B B , I 2 2 89260 6 де m - масса ексцентрикової втулки; - густина матеріалу, з якого виготовлена ексцентрикова втулка; RB - радіус зовнішньої циліндричної поверхні ексцентрикової втулки; В - товщина ексцентрикової втулки (див. Фіг.6 та 7). На підставі рівності Wk А Д визначається сила удару рухомого упора 13 по нерухомому висунутому вгору упору 14 R4 B 2 АД B P , l 4 l де А Д - робота пружної деформації контактних поверхонь упорів; l - величина пружної деформації контактних поверхонь. Умова міцності на зминання контактних поверхонь P зм зм F Де F - площа контактної поверхні упорів, яка дорівнює F=А В; зм - допустиме напруження на зминання найбільш слабкого матеріалу з деталей, що входять в контакт. Після підстановки значень R4 B 2 B зм 4 l A B визначається ширина А упора з умови міцності контактних поверхонь упорів на зминання 2 R4 B A , 4 l зм де - кутова швидкість ексцентрикової втулки та кривошипного вала, яка залежить від кількості подвійних ходів п повзуна пресса в хвилину n 30 Коли рухомий упор прикріплений до плоскої торцевої поверхні ексцентрикової втулки 6 і виступає над нею на величину Н, яка вибирається рівною товщині втулки В=Н (див. Фіг.7), вище знайдена залежність має аналогічний вигляд. Для механічних пресів із середньою (найбільш розповсюдженою) кількістю подвійних ходів повзуна n=100 ходів у хвилину при пружній деформації контактних поверхонь l 1мм ширина упора А залежить від матеріалу та розмірів ексцентрикової втулки і допустимого напруження зминання найбільш слабкої контактної поверхні, де відбувається удар рухомого упора по видвинутому упору R4 B. A 86 зм Заявлений прес працює наступним чином. Встановлений на станині 1 електродвигун 2 через гнучкий зв'язок 3 приводить до обертання маховик 4 і жорстко з'єднаний з ним кривошипний вал 5. При відсутності подачі енергоносія (стисне 7 ного повітря, робочої рідини під тиском тощо) в поршневу порожнину силового циліндра 16 його поршень, шток 15 та висувний упор 14 під дією пружини 17 знаходяться в крайньому нижньому положенні (див. Фіг.3 та 5). Висувний упор 14, відведений униз на величину S, яка не менш ширини А рухомого упора 13, не заважає обертатися ексцентриковій втулці 6, що автоматично з'єднується з кривошипним валом 5 за допомогою фіксатора кульки 9. Остання виштовхується з радіального отвору 8 пружиною 10 і попадає в конічну лунку 12 на шипі вала 5. При цьому фіксатор - кулька 9 заходить в конічну лунку менше ніж на половину свого діаметра. Тоді ексцентрикова втулка 6 компенсує кутовий поворот кривошипного вала 5 своїм провертанням в той же бік на однаковий кут, так як ексцентриситет Е втулки 6 дорівнює радіусу кривошипа R кривошипного вала 5. При холостому обертанні останнього разом з ексцентриковою втулкою 6, як єдиного циліндричного тіла, повзун 20 залишається нерухомим і утримується пневматичними урівноважувачами 22 в крайньому верхньому положенні. Після підведення енергоносія в поршневу порожнину силового циліндра 16 його поршень стискає пружину 17 і разом із штоком 15 та висувним упором 14 пересувається вгору до центра ексцентрикової втулки 6 (див. Фіг.2 та 4). Рухомий упор 13, який обертався разом з ексцентриковою втулкою 6, доходить до висувного упора 14, упирається в нього і гальмує ексцентрикову втулку 6 до її повної зупинки. В цей час фіксатор - кулька 9 витискається кривошипним валом 5, що продовжує обертатися, із конічної лунки 12 в радіальний отвір 8 ексцентрикової втулки 6 і залишається в "зануреному" стані за рахунок стиснення пружини 10. Після зупинки ексцентрикова втулка 6, наприклад виготовлена із бронзи, виконує роль підшипника ковзання, а повзун 20 при подальшому обертанні кривошипного вала 5 здійснює поступальний рух униз, виконує технологічну операцію штампування і підіймається вгору. Одночасно із зворотнопоступальним рухом повзуна 20 відбувається переміщення рухомих частин урівноважувачів 22. Після вимикання силового циліндра 16 або при аварійному припиненні підведення енергоносія висувний упор 14 разом із штоком 15 та порш 89260 8 нем під дією пружини 17 переміщується униз від центра ексцентрикової втулки 6 і звільняє останню (див. Фіг.3 та 5). Вона з'єднується фіксаторомкулькою 9, що потрапляє під тиском пружини 10 в конічну лунку 12, з кривошипним валом 5 і починає обертатися разом з ним. При холостому обертанні кривошипного вала 5 з ексцентриковою втулкою 6 повзун 20 зупиняється в крайньому верхньому положенні, в якому утримується урівноважувачами 22. Використання заявленого механічного безмуфтового преса забезпечує наступні переваги: - підвищення надійності роботи, зменшення витрат на експлуатацію, обслуговування та ремонт за рахунок спрощення конструкції запропонованої безмуфтової системи вмикання; - збільшення терміну служби преса і поліпшення умов його експлуатації; - зменшення втрат енергії на тертя при переміщенні рухомих елементів і покращення умов їх охолодження та змащення у відкритій системі безмуфтового вмикання. Запропонована в формулі винаходу сполука основних ознак забезпечує якісно нову конструкцію механічного безмуфтового преса, яка є недосяжною при традиційному рішенні. Конструкція преса не є очевидною для спеціалістів і вносить нові можливості в процес проектування сучасного кривошипного обладнання, що дозволяє зробити висновок про відповідність цього технічного рішення критерію «винахідницький рівень». Перелічені відмінні суттєві ознаки характеризують новизну заявленого технічного рішення і забезпечують позитивний ефект у вигляді спрощення конструкції та підвищення надійності в роботі. Заявлений винахід може знайти використання в ковальсько-штампувальному обладнанні в якості нової безмуфтової конструкції універсальних одностоякових та двостоякових кривошипних пресів відкритого й закритого типів, тобто відповідає умові «промислове застосування». Техніко-економічні переваги запропонованого механічного безмуфтового преса полягають в спрощенні конструкції, зменшенні габаритних розмірів та підвищенні надійності його роботи. 9 89260 10 11 89260 12 13 Комп’ютерна верстка М. Ломалова 89260 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical clutchless press
Автори англійськоюZaporozhchenko Vitalii Serhiiovych
Назва патенту російськоюМеханический безмуфтовый пресс
Автори російськоюЗапорожченко Виталий Сергеевич
МПК / Мітки
МПК: B30B 1/26, B30B 15/00
Мітки: механічний, безмуфтовий, прес
Код посилання
<a href="https://ua.patents.su/7-89260-mekhanichnijj-bezmuftovijj-pres.html" target="_blank" rel="follow" title="База патентів України">Механічний безмуфтовий прес</a>
Механічний безмуфтовий прес
Номер патенту: 33694
Опубліковано: 15.02.2001
Автор: Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: механічний, прес, безмуфтовий
Текст:
...клиновим упором 12, виконаним, наприклад, у вигляді приливка, відлитого за одне суцільне з тілом шатуна 9. Повернуті одна до одної поверхні рухомого 11 і нерухомого 12 упорів виконані циліндричними однакового радіуса R1, а поздовжню вісь циліндричної поверхні нерухомого упору 12 розміщено на осі 8 шарніра кришки 7. Шатун має пружину стискання 13, яку, розташовано між вільним кінцем кришки 7 та тілом шатуна 9. Повзун 14 розміщено у...
Механічний безмуфтовий прес
Номер патенту: 34111
Опубліковано: 15.02.2001
Автори: Осауленко Оксана Олександрівна, Дейнекін Сергій Олексійович, Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: механічний, безмуфтовий, прес
Текст:
...8 виконано поглиблення 17, наприклад конічної форми. Повзун 18 розміщено у вертикальних напрямних станини 1 і з'єднано з тілом шатуна 11 через регулювальний гвинт 10, а також з урівноважувачем 20, наприклад пневматичного типу. Запропонований прес працює таким чином. Встановлений на станині 1 електродвигун 2 через гнучкий зв'язок приводить до обертання маховик 3 і жорстко з'єднаний з ним кривошипний вал 4. При відсутності подачі стисненого...
Механічний безмуфтовий прес
Номер патенту: 46900
Опубліковано: 11.01.2010
Автори: Кириченко Руслан Олексійович, Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: механічний, безмуфтовий, прес
Формула / Реферат:
Механічний безмуфтовий прес, що містить станину, кривошипний вал, змонтований у підшипникових опорах станини і зв'язаний з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикову втулку з ексцентриситетом, рівним радіусу кривошипа, яка встановлена на останньому та охоплюється великою головкою шатуна, в тілі якого розміщено радіальну канавку, а в тілі ексцентрикової втулки в радіальному напрямку виконано отвір, напроти якого...
Механічний безмуфтовий прес
Номер патенту: 31934
Опубліковано: 25.04.2008
Автори: Бондарев Олексій Олегович, Жиленко Олександр Іванович, Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: безмуфтовий, прес, механічний
Формула / Реферат:
Механічний безмуфтовий прес, що містить станину, кривошипний вал, змонтований у підшипникових опорах станини і зв'язаний з електродвигуном за допомогою маховика та гнучкого зв'язку, встановлену на кривошипі ексцентрикову втулку, яка має ексцентриситет, що дорівнює радіусу кривошипа, і охоплюється великою головкою шатуна, повзун, розміщений у вертикальних напрямних станини і з'єднаний з шатуном та зрівноважувачем повзуна, а також засіб...
Механічний безмуфтовий прес
Номер патенту: 26313
Опубліковано: 10.09.2007
Автори: Запорожченко Віталій Сергійович, Зимин Максим Олександрович
МПК: B30B 15/00
Мітки: механічний, безмуфтовий, прес
Формула / Реферат:
Механічний безмуфтовий прес, що складається з станини, кривошипного вала, змонтованого в підшипникових опорах станини і зв'язаного з електродвигуном за допомогою маховика та гнучкого зв'язку, встановленої на кривошипі ексцентрикової втулки, що має ексцентриситет, рівний радіусу кривошипа, і охоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, в якому розміщено рухомий фіксатор, а напроти, в зовнішній...
Попередній патент: Спосіб виготовлення штучного скляного волоконного продукту і пристрій для його здійснення
Наступний патент: Гравійний фільтр
Випадковий патент: Пристрій для підвищення осьового навантаження