Спосіб збору корисних копалин підводних родовищ та багатофункціональна система для його реалізації
Номер патенту: 89287
Опубліковано: 11.01.2010
Автори: Франчук Всеволод Петрович, Єгурнов Олександр Іванович, Півняк Геннадій Григорович, Євтєєв Володимир Васильович, Кириченко Євген Олексійович
Формула / Реферат
1. Спосіб збору корисних копалин підводних родовищ, що включає створення основного та додаткового потоків води, отримання потоку гідросуміші після введення елементів корисних копалин підводних родовищ у складі гірничої маси в основний потік води та транспортування потоку гідросуміші, який відрізняється тим, що попередньо задають умову співвідношення мінімального значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, до фактичного поточного значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, за допомогою багатофункціональної системи для збору корисних копалин підводних родовищ збирають природно сформований на дні водоймища прошарок гірничої маси, що містить утворені компонентами корисних копалин підводних родовищ елементи, видаляють мул із гірничої маси, яку збирають, шляхом її промивання частиною додаткового потоку води, транспортують промиту гірничу масу в додатковому потоці води через бункер на здрібнення, здрібнюють в дробарці промиту гірничу масу, утворюють потік гідросуміші шляхом подачі здрібненої гірничої маси разом з додатковим потоком води в основний потік води та транспортують потік гідросуміші від багатофункціональної системи для збору корисних копалин підводних родовищ, керують рухом багатофункціональної системи для збору корисних копалин підводних родовищ на підставі отриманої від інтегрованої навігаційно-координаційної системи інформації, визначають фактичне поточне значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, контролюють виконання заданої умови та забезпечують стабільність її виконання в часі шляхом регулювання величин витрат основного та додаткового потоків води.
2. Багатофункціональна система для збору корисних копалин підводних родовищ, яка містить самохідну платформу та встановлені на самохідній платформі бункер і насос з всмоктувальним та нагнітальним трубопроводами, яка відрізняється тим, що багатофункціональна система містить інтегровану навігаційно-координаційну систему, обладнана відповідним електромеханічним приводом дробарка з'єднана з бункером, самохідна платформа обладнана порожнистими шнековими рушіями, бункер сполучений з нагнітальним трубопроводом насоса через обладнаний керованою засувкою патрубок, електромеханічні приводи відповідних порожнистих шнекових рушіїв з'єднані з самохідною платформою, донна частина бункера обладнана приймальним люком, обладнаний електромеханічним приводом секційний колосниковий вібраційний врівноважений підбирач приєднаний до бункера в зоні приймального люка, всмоктувальний трубопровід насоса сполучений з басейном водоймища, в якому ведеться розробка підводного родовища корисних копалин, завантажувальне вікно дробарки сполучене з бункером, гнучкий трубопровід з'єднаний з нагнітальним трубопроводом насоса, випускне вікно дробарки сполучене через додатковий патрубок з нагнітальним трубопроводом насоса, в донній частині бункера між приймальним люком та дробаркою встановлений конвеєр з відповідним електромеханічним приводом, розташована між зонами з'єднання з обладнаним керованою засувкою патрубком та додатковим патрубком ділянка нагнітального трубопроводу насоса містить керовану засувку, обладнаний керованою засувкою патрубок з'єднаний з розташованим в бункері наконечником, датчик визначення величини концентрації твердих часток в потоці гідросуміші - консистометр - сполучений з розташованою між зонами з'єднання з додатковим патрубком та гнучким трубопроводом ділянкою нагнітального трубопроводу насоса, апарат спрямування руху гірничої маси встановлено в бункері, зона з'єднання нагнітального трубопроводу насоса з додатковим патрубком розташована по ходу руху потоку рідини в нагнітальному трубопроводі насоса після зони з'єднання обладнаного керованою засувкою патрубка з нагнітальним трубопроводом насоса, а блок керування з'єднаний з інтегрованою навігаційно-координаційною системою, насосом, консистометром, всіма керованими засувками та електромеханічними приводами дробарки, конвеєра, секційного колосникового вібраційного врівноваженого підбирача та відповідних порожнистих шнекових рушіїв.
3. Багатофункціональна система за п. 2, яка відрізняється тим, що площа поперечного перерізу з'єднаного з обладнаним керованою засувкою патрубком та розташованого в бункері наконечника збільшується по ходу руху в ньому потоку рідини.
Текст
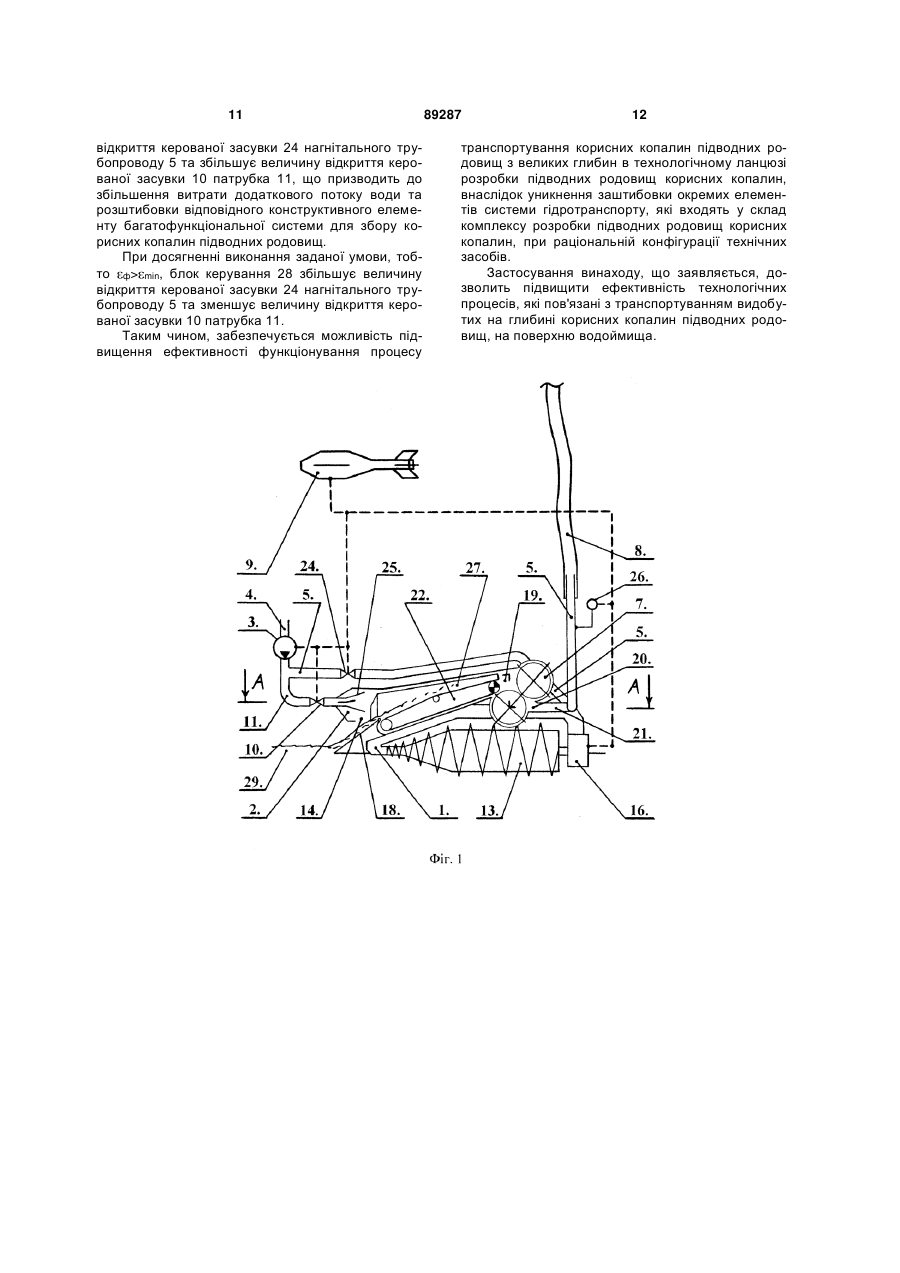
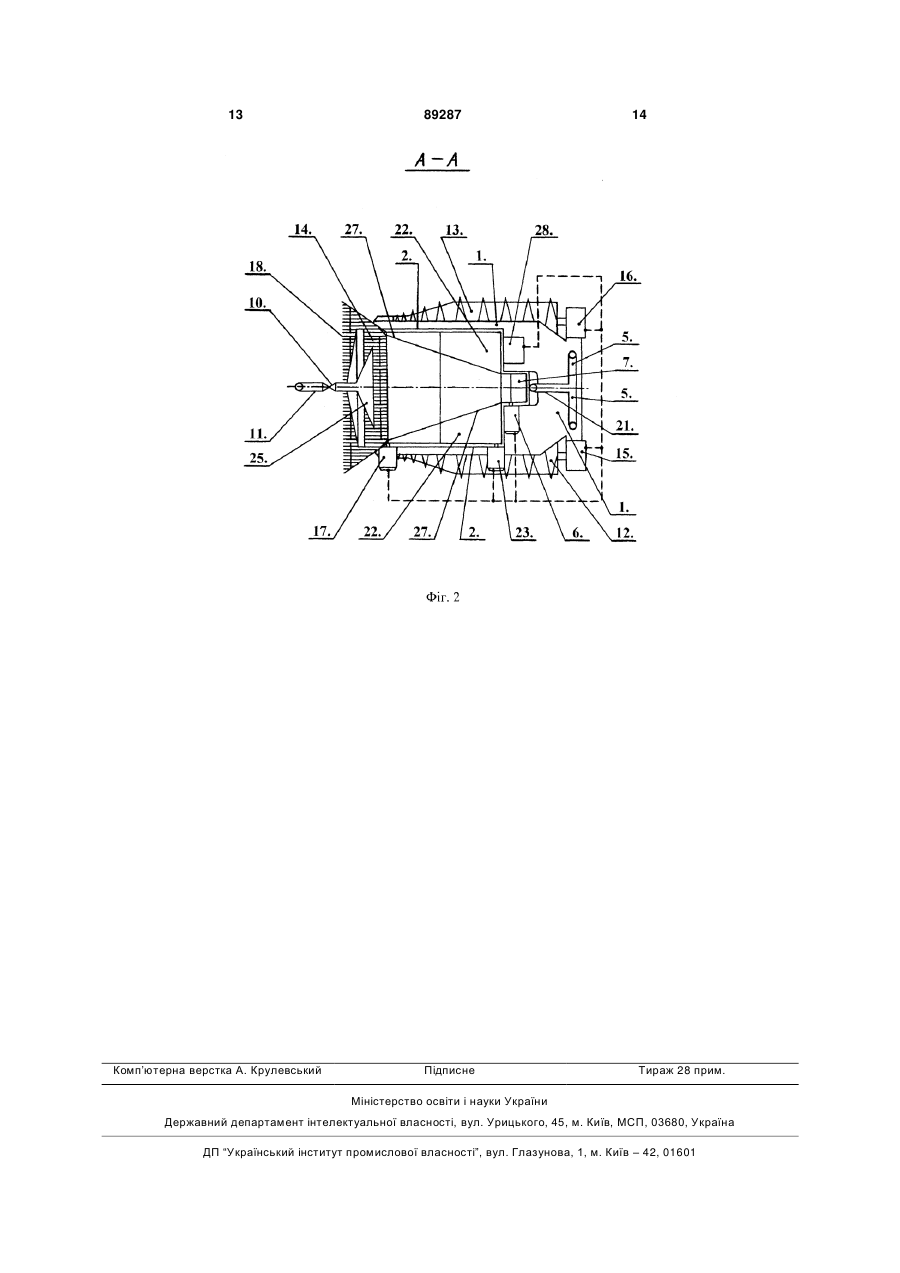
1. Спосіб збору корисних копалин підводних родовищ, що включає створення основного та додаткового потоків води, отримання потоку гідросуміші після введення елементів корисних копалин підводних родовищ у складі гірничої маси в основний потік води та транспортування потоку гідросуміші, який відрізняється тим, що попередньо задають умову співвідношення мінімального значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, до фактичного поточного значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, за допомогою багатофункціональної системи для збору корисних копалин підводних родовищ збирають природно сформований на дні водоймища прошарок гірничої маси, що містить утворені компонентами корисних копалин підводних родовищ елементи, видаляють мул із гірничої маси, яку збирають, шляхом її промивання частиною додаткового потоку води, транспортують промиту гірничу масу в додатковому потоці води через бункер на здрібнення, здрібнюють в дробарці промиту гірничу масу, утворюють потік гідросуміші шляхом подачі здрібненої гірничої маси разом з додатковим потоком води в основний потік води та транс 2 (19) 1 3 89287 4 вим патрубком ділянка нагнітального трубопроводу насоса містить керовану засувку, обладнаний керованою засувкою патрубок з'єднаний з розташованим в бункері наконечником, датчик визначення величини концентрації твердих часток в потоці гідросуміші - консистометр - сполучений з розташованою між зонами з'єднання з додатковим патрубком та гнучким трубопроводом ділянкою нагнітального трубопроводу насоса, апарат спрямування руху гірничої маси встановлено в бункері, зона з'єднання нагнітального трубопроводу насоса з додатковим патрубком розташована по ходу руху потоку рідини в нагнітальному трубопроводі насоса після зони з'єднання обладнаного керованою засувкою патрубка з нагнітальним трубопроводом насоса, а блок керування з'єднаний з інтегрованою навігаційно-координаційною системою, насосом, консистометром, всіма керованими засувками та електромеханічними приводами дробарки, конвеєра, секційного колосникового вібраційного врівноваженого підбирача та відповідних порожнистих шнекових рушіїв. 3. Багатофункціональна система за п. 2, яка відрізняється тим, що площа поперечного перерізу з'єднаного з обладнаним керованою засувкою патрубком та розташованого в бункері наконечника збільшується по ходу руху в ньому потоку рідини. Винахід відноситься безпосередньо до галузі розробки підводних родовищ корисних копалин. Відомий спосіб підйому гідросуміші з великих глибин, який включає завдання величини концентрації твердих часток в потоці гідросуміші всмоктувального трубопроводу насоса до виведення з його складу твердих часток, подачу елементів підводних родовищ корисних копалин у складі гідросуміші у всмоктувальний трубопровід насоса, транспортування гідросуміші у всмоктувальному трубопроводі насоса, безперервне виведення твердих часток зі складу потоку гідросуміші всмоктувального трубопроводу насоса в процесі підйому елементів підводних родовищ корисних копалин з глибини, подачу виведених зі складу потоку всмоктувального трубопроводу насоса твердих часток підводних родовищ корисних копалин в потік нагнітального трубопроводу насоса з подальшим транспортуванням елементів підводних родовищ корисних копалин у складі потоку гідросуміші нагнітального трубопроводу насоса, контролювання величини концентрації твердих часток в потоці гідросуміші нагнітального трубопроводу насоса після введення у його склад виведених з потоку гідросуміші всмоктувального трубопроводу насоса твердих часток, порівняння контрольованої величини з заданою та досягнення їх відповідності шляхом регулювання величиною витрати насоса (патент Російської Федерації №2310098, кл. F04D 7/04, F04D 13/08, 2005 р.) Недоліком відомого способу є можливість заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, що обумовлює низьку ефективність функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин. Відомий самохідний комбайн для видобутку конкрецій з морського дна з дистанційним керуванням, який містить V-подібну трубну раму, розташовані на кінцях рами три ходові самохідні платформи, два черпакових ланцюга для видобутку конкрецій, пристрій для первинної переробки видобутих конкрецій (корисних копалин), змонтовані в циліндричних корпусах комбайна електричні та гідравлічні засоби керування, а також механізми для занурення, баластування, повторного транс портування та фіксації в просторі під водою, (патент ФРГ № 2813751 кл. E21C 45/00, 1982 р.) Недоліком відомого комбайну є можливість заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, що обумовлює низьку ефективність функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин, а також значна металоємність комбайна. Найбільш близьким технологічним рішенням є спосіб роботи гідротранспортної установки, який включає завдання величини швидкості обертання робочого колеса, через лопаті якого проходить потік гідросуміші всмоктувального трубопроводу насоса, подачу елементів підводних родовищ корисних копалин у складі гідросуміші у всмоктувальний трубопровід насоса, транспортування гідросуміші у всмоктувальному трубопроводі насоса, безперервне виведення твердих часток зі складу потоку гідросуміші всмоктувального трубопроводу насоса в процесі підйому елементів підводних родовищ корисних копалин з глибини, подачу виведених зі складу потоку всмоктувального трубопроводу насоса твердих часток підводних родовищ корисних копалин в потік нагнітального трубопроводу насоса з подальшим транспортуванням елементів підводних родовищ корисних копалин у складі потоку гідросуміші нагнітального трубопроводу насоса, контролювання величини швидкості обертання обладнаного лопатями робочого колеса під час надходження в потік нагнітального трубопроводу насоса твердих часток підводних родовищ корисних копалин, порівняння контрольованої величини з заданою та досягнення їх відповідності шляхом регулювання величиною витрати спрямованої подачі частини високонапірного потоку нагнітального трубопроводу насоса на лопаті робочого колеса (патент Російської Федерації №2310097, кл. F04D 7/04, F04D 13/08, 2005 р.) Недоліком найбільш близького технологічного рішення є можливість заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, що обумовлює низьку ефективність функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в 5 технологічному ланцюзі розробки підводних родовищ корисних копалин. Найбільш близьким технологічним рішенням є пристрій для збору на великих глибинах з морського дна рудних відкладень, який містить самохідну платформу, встановлений на самохідній платформі бункер, встановлений в нижній частині бункера струменевий насос, розташований на поверхні водоймища, в якому ведеться розробка корисних копалин, базовий плаваючий засіб, сполучений з базовим плаваючим засобом нагнітальний трубопровід струменевого насоса, встановлений на базовому плаваючому засобі насос високого тиску, сполучений з струменевим насосом нагнітальний трубопровід насоса високого тиску, утворену двома паралельно з'єднаними трубопроводами ділянку нагнітального трубопроводу струменевого насоса, встановлені в ставах кожного паралельного трубопроводу відповідні завантажувальні та випускні клапани, з'єднаний з нагнітальним трубопроводом насоса високого тиску додатковий трубопровід, обладнані відповідними клапанами, а також сполучені з басейном водоймища, в якому ведеться розробка корисних копалин, та з розташованими між завантажувальними та випускними клапанами відповідними ділянками паралельних трубопроводів відповідні патрубки, встановлену на самохідній платформі та обладнану шнековим робочим органом стрілу, при цьому додатковий трубопровід сполучений через відповідні клапани подачі тиску з розташованими між завантажувальними та випускними клапанами відповідними ділянками паралельних трубопроводів, а зони з'єднання паралельних трубопроводів з відповідними патрубками знаходяться по ходу руху потоку рідини в відповідних паралельних трубопроводах після зон з'єднання відповідних паралельних трубопроводів з додатковим трубопроводом (заявка Японії № 57-52479, кл. E21C 45/00, 1982 р.) Недоліком найбільш близького технологічного рішення є можливість заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, що обумовлює низьку ефективність функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин. В основу винаходу поставлена задача удосконалення способу збору корисних копалин підводних родовищ, в якому, шляхом вибору інших технологічних параметрів для контролювання, забезпечується можливість підвищення ефективності функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин, внаслідок уникнення заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин. Поставлена задача розв'язується таким чином, що відомий спосіб збору корисних копалин підводних родовищ, що включає створення основного та додаткового потоків води, отримання пото 89287 6 ку гідросуміші після введення елементів корисних копалин підводних родовищ у складі гірничої маси в основний потік води та транспортування потоку гідросуміші, який відповідно до винаходу відрізняється тим, що попередньо задають умову співвідношення мінімального значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, до фактичного поточного значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, за допомогою багатофункціональної системи для збору корисних копалин підводних родовищ збирають природно сформований на дні водоймища прошарок гірничої маси, що містить створені компонентами корисних копалин підводних родовищ елементи, видаляють мул із гірничої маси, яку збирають, шляхом її промивання частиною додаткового потоку води, транспортують промиту гірничу масу в додатковому потоці води через бункер на здрібнення, здрібнюють в дробарці промиту гірничу масу, утворюють потік гідросуміші шляхом подачі здрібненої гірничої маси разом з додатковим потоком води в основний потік води та транспортують потік гідросуміші від багатофункціональної системи для збору корисних копалин підводних родовищ, керують рухом багатофункціональної системи для збору корисних копалин підводних родовищ на підставі отриманої від інтегрованої навігаційно-координаційної системи інформації, визначають фактичне поточне значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, контролюють виконання заданої умови та забезпечують стабільність її виконання в часі, шляхом регулювання величинами витрат основного та додаткового потоків води. В основу винаходу поставлена задача удосконалення багатофункціональної системи для збору корисних копалин підводних родовищ, в якій, шляхом введення додаткових елементів та інших з'єднань у відому конструктивну схему, забезпечується можливість підвищення ефективності функціонування процесу транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин, внаслідок уникнення заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, при раціональній конфігурації технічних засобів. Поставлена задача розв'язується таким чином, що відома багатофункціональна система для збору корисних копалин підводних родовищ, що містить самохідну платформу та встановлені на самохідній платформі бункер і насос з всмоктувальним та нагнітальним трубопроводами, яка відповідно до винаходу відрізняється тим, що багатофункціональна система містить інтегровану навігаційно-координаційну систему, обладнана відповідним електромеханічним приводом дробар 7 ка з'єднана з бункером, самохідна платформа обладнана порожнистими шнековими рушіями, бункер сполучений з нагнітальним трубопроводом насоса через обладнаний керованою засувкою патрубок, електромеханічні приводи відповідних порожнистих шнекових рушіїв з'єднані з самохідною платформою, донна частина бункера обладнана приймальним люком, обладнаний електромеханічним приводом секційнийколосниковий вібраційний врівноважений підбирач приєднаний до бункера в зоні приймального люка, всмоктувальний трубопровід насоса сполучений з басейном водоймища, в якому ведеться розробка підводного родовища корисних копалин, завантажувальне вікно дробарки сполучене з бункером, гнучкий трубопровід з'єднаний з нагнітальним трубопроводом насоса, випускне вікно дробарки сполучене через додатковий патрубок з нагнітальним трубопроводом насоса, в донній частині бункера між приймальним люком та дробаркою встановлений конвеєр з відповідним електромеханічним приводом, розташована між зонами з'єднання з обладнаним керованою засувкою патрубком та додатковим патрубком ділянка нагнітального трубопроводу насоса містить керовану засувку, обладнаний керованою засувкою патрубок з'єднаний з розташованим в бункері наконечником, датчик визначення величини концентрації твердих часток в потоці гідросуміші - консистометр сполучений з розташованою між зонами з'єднання з додатковим патрубком та гнучким трубопроводом ділянкою нагнітального трубопроводу насоса, апарат спрямування руху гірничої маси встановлено в бункері, зона з'єднання нагнітального трубопроводу насоса з додатковим патрубком розташована по ходу руху потоку рідини в нагнітальному трубопроводі насоса після зони з'єднання обладнаного керованою засувкою патрубка з нагнітальним трубопроводом насоса, а блок керування з'єднаний з інтегрованою навігаційно-координаційною системою, насосом, консистометром, всіма керованими засувками та електромеханічними приводами дробарки, конвеєра, секційного колосникового вібраційного врівноваженого підбирача та відповідних порожнистих шнекових рушіїв. Крім того, площа поперечного перетину з'єднаного з обладнаним керованою засувкою патрубком та розташованого в бункері наконечника збільшується по ходу руху в ньому потоку рідини. На фігурах 1 та 2 зображена схема багатофункціональної системи для збору корисних копалин підводних родовищ. Багатофункціональна система для збору корисних копалин підводних родовищ містить самохідну платформу 1, встановлені на самохідній платформі 1 бункер 2 та насос 3 з всмоктувальним 4 та нагнітальним 5 трубопроводами, з'єднану з бункером 2 та обладнану відповідним електромеханічним приводом 6 дробарку 7, з'єднаний з нагнітальним трубопроводом 5 гнучкий трубопровід 8, інтегровану навігаційно-координаційну систему 9, при цьому бункер 2 сполучений з нагнітальним трубопроводом 5 через обладнаний керованою засувкою 10 патрубок 11, самохідна платформа 1 обладнана порожнистими шнековими рушіями 12 89287 8 та 13, донна частина бункера 2 обладнана приймальним люком 14, електромеханічні приводи 15 та 16 відповідних порожнистих шнекових рушіїв 12 та 13 з'єднані з самохідною платформою 1, обладнаний електромеханічним приводом 17 секційний колосниковий вібраційний врівноважений підбирач 18 з'єднаний з бункером 2 в зоні приймального люка 14, всмоктувальний трубопровід 4 сполучений з басейном водоймища, в якому ведеться розробка підводного родовища корисних копалин, завантажувальне вікно 19 дробарки 7 сполучене з бункером 2, випускне вікно 20 дробарки 7 сполучене через додатковий патрубок 21 з нагнітальним трубопроводом 5, в донній частині бункера 2 між приймальним люком 14 та дробаркою 7 встановлений конвеєр 22 з відповідним електромеханічним приводом 23, розташована між зонами з'єднання з обладнаним керованою засувкою 10 патрубком 11 та додатковим патрубком 21 ділянка нагнітального трубопроводу 5 містить керовану засувку 24, обладнаний керованою засувкою 10 патрубок 11 з'єднаний з розташованим в бункері 2 наконечником 25, датчик визначення величини концентрації твердих часток в потоці гідросуміші консистометр 26 сполучений з розташованою між зонами з'єднання з додатковим патрубком 21 та гнучким трубопроводом 8 ділянкою нагнітального трубопроводу 5, апарат спрямування руху гірничої маси 27 встановлено в бункері 2, зона з'єднання нагнітального трубопроводу 5 з додатковим патрубком 21 знаходиться по ходу руху потоку рідини в нагнітальному трубопроводі 5 після зони з'єднання обладнаного керованою засувкою 10 патрубка 11 з нагнітальним трубопроводом 5, а блок керування 28 з'єднаний з електромеханічними приводами 15, 16 порожнистих шнекових рушіїв 12, 13 відповідно, інтегрованою навігаційнокоординаційною системою 9, насосом 3, електромеханічними приводами 6 та 23 дробарки 7 та конвеєра 22 відповідно, консистометром 26 та всіма керованими засувками 10, 24. Крім того, площа поперечного перетину з'єднаного з обладнанимкерованою засувкою 10 патрубком 11 та розташованого в бункері 2 наконечника 25 збільшується по ходу руху в ньому потоку рідини, а багатофункціональна система для збору корисних копалин підводних родовищ відпрацьовує природно сформований на дні водоймища прошарок гірничої маси 29, який має вміст створених компонентами корисних копалин підводних родовищ елементів. Спосіб за допомогою багатофункціональної системи для збору корисних копалин підводних родовищ реалізується наступним чином. Попередньо задають умову співвідношення мінімального значення робочої величини концентрації твердих часток ( min) в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, до фактичного поточного значення робочої величини концентрації твердих часток ( ф) в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ: 9 Перед запуском багатофункціональної системи для збору корисних копалин підводних родовищ керовані засувки 10 та 24 повністю закриті. Блок керування 28 виконує запуск насоса 3 та електромеханічних приводів 6, 23, 17 та 15, 16 дробарки 7, конвеєра 22, секційного колосникового вібраційного врівноваженого підбирача 18 та порожнистих шнекових рушіїв 12, 13 відповідно, а також повністю та частково відкриває керовані засувки 24 та 10 відповідно. Внаслідок цього порожнисті шнекові рушії 12 та 13 забезпечують рух багатофункціональної системи для збору корисних копалин підводних родовищ по природно сформованому на дні водоймища прошарку гірничої маси 29. Насос 3 створює основний потік води, який рухається по нагнітальному трубопроводу 5, через повністю відкриту керовану засувку 24, безпосередньо в гнучкий трубопровід 8. З основного потоку води нагнітального трубопроводу 5 формується додатковий потік води, який надходить по патрубку 11, через частково відкриту керовану засувку 10, наконечник 25, бункер 2, дробарку 7, додатковий патрубок 21 знову в основний потік нагнітального трубопроводу 5 і далі транспортується у його складі. Запуск електромеханічних приводів 17, 23 та 6 забезпечує роботу секційного колосникового вібраційного врівноваженого підбирача 18, конвеєра 22 та дробарки 7. При цьому блок керування 28 на підставі отриманої від інтегрованої навігаційно-координаційної системи 9 інформації, керує рухом багатофункціональної системи для збору корисних копалин підводних родовищ, шляхом регулювання за допомоги електромеханічних приводів 15 та 16, швидкостями обертання відповідних порожнистих шнекових рушіїв 12 та 13. При цьому порожнисті шнекові рушії 12 та 13 також виконують функцію баків плавучості, що перешкоджає досягненню критичного рівня просідання багатофункціональної системи для збору корисних копалин підводних родовищ в мулисті відкладення дна водоймища, в якому ведеться розробка підводного родовища. Після початку руху багатофункціональної системи для збору корисних копалин підводних родовищ, блок керування 28 за допомогою електромеханічного приводу 17 заглиблює секційний колосниковий вібраційний врівноважений підбирач 18 в прошарок гірничої маси 29. Таким чином, створені компонентами корисних копалин підводних родовищ елементи у складі гірничої маси по секційному колосниковому вібраційному врівноваженому підбирачеві 18 починають рухатися в бункер 2. В бункер 2 надходить додатковий потік води, внаслідок чого, величина абсолютного тиску в бункері 2 перевищує величину абсолютного тиску в оточуючому бункер 2 середовищі, що обумовлює вихід частини додаткового потоку води, через розташований в донній частині бункера 2 приймальний люк 14, в басейн водоймища. Питома вага створених компонентами корисних копалин підводних родовищ елементів, перевищує питому вагу 89287 10 мулу, який входить у склад прошарку гірничої маси 29, який розробляється. Таким чином, вихід частини додаткового потоку води через приймальний люк 14 в басейн водоймища, при використанні секційного вібраційного врівноваженого підбирача 18 колосникового типу, забезпечить ефективне видалення значної кількості мулу з гірничої маси, яку збирають, шляхом її промивання частиною додаткового потоку води. При цьому, в бункер 2 буде надходити гірнича маса з високою концентрацією створених компонентами корисних копалин підводних родовищ елементів. Після надходження в бункер 2, промита гірнича маса з високою концентрацією створених компонентами корисних копалин підводних родовищ елементів, транспортується за допомогою конвеєра 22 та додаткового потоку води в дробарку 7. Збільшення площі поперечного перетину наконечника 25, по ходу руху в ньому потоку рідини, підвищує рівномірність транспортування промитої гірничої маси через об'єм бункера 2. Встановлений в бункері 2 апарат спрямування руху гірничої маси 27 забезпечує надходження промитої гірничої маси, яка транспортується через бункер 2, в завантажувальне вікно 19 дробарки 7. В дробарці 7 відбувається здрібнення промитої гірничої маси з наступним транспортуванням здрібненої гірничої маси в додатковому потоці води через випускне вікно 20 дробарки 7 та додатковий патрубок 21 в основний потік води, який рухається в нагнітальному трубопроводі 5. Після надходження здрібненої гірничої маси разом з додатковим потоком води в основний потік води, в нагнітальному трубопроводі 5 утворюється потік гідросуміші, який далі транспортується від багатофункціональної системи для збору корисних копалин підводних родовищ. Паралельно з запуском насоса 3, в блок керування 28 від консистометра 26 надходить інформація про фактичне поточне значення робочої величини концентрації твердих часток в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ. Після фіксації консистометром 26 мінімального значення робочої величини концентрації твердих часток ( min) в потоці гідросуміші, який рухається від багатофункціональної системи для збору корисних копалин підводних родовищ, блок керування 28 розпочинає контролювати виконання заданої умови. У разі виникнення заштибовки бункера 2, або інших конструктивних елементів багатофункціональної системи для збору корисних копалин підводних родовищ, рух твердих часток через цей конструктивний елемент ускладнюється, що сприяє подальшому прогресуванню процесу заштибовки відповідного конструктивного елемента та вступу твердої складової в місцях заштибовки в процеси агломерації. При цьому фактичне поточне значення робочої величини концентрації твердих часток ( ф) в потоці гідросуміші, який транспортують від багатофункціональної системи для збору корисних копалин підводних родовищ, зменшується. При не виконанні заданої умови, тобто min= ф, або min> ф , блок керування 28 зменшує величину 11 відкриття керованої засувки 24 нагнітального трубопроводу 5 та збільшує величину відкриття керованої засувки 10 патрубка 11, що призводить до збільшення витрати додаткового потоку води та розштибовки відповідного конструктивного елементу багатофункціональної системи для збору корисних копалин підводних родовищ. При досягненні виконання заданої умови, тобто ф> min, блок керування 28 збільшує величину відкриття керованої засувки 24 нагнітального трубопроводу 5 та зменшує величину відкриття керованої засувки 10 патрубка 11. Таким чином, забезпечується можливість підвищення ефективності функціонування процесу 89287 12 транспортування корисних копалин підводних родовищ з великих глибин в технологічному ланцюзі розробки підводних родовищ корисних копалин, внаслідок уникнення заштибовки окремих елементів системи гідротранспорту, які входять у склад комплексу розробки підводних родовищ корисних копалин, при раціональній конфігурації технічних засобів. Застосування винаходу, що заявляється, дозволить підвищити ефективність технологічних процесів, які пов'язані з транспортуванням видобутих на глибині корисних копалин підводних родовищ, на поверхню водоймища. 13 Комп’ютерна верстка А. Крулевський 89287 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for collection of minerals of underwater deposits and multi-functional system for its realization
Автори англійськоюPivniak Hennadii Hryhorovych, Franchuk Vsevolod Petrovych, Kyrychenko Yevhen Oleksiiovych, Yehurnov Oleksandr Ivanovych, Yevteiev Volodymyr Vasyliovych
Назва патенту російськоюСпособ сбора полезных ископаемых подводных месторождений и многофункциональная система для его реализации
Автори російськоюПивняк Геннадий Григорьевич, Франчук Всеволод Петрович, Кириченко Евгений Алексеевич, Егурнов Александр Иванович, Евтеев Владимир Васильевич
МПК / Мітки
МПК: E21C 50/00, F04F 1/00, E21C 45/00
Мітки: родовищ, багатофункціональна, реалізації, корисних, підводних, копалин, система, збору, спосіб
Код посилання
<a href="https://ua.patents.su/7-89287-sposib-zboru-korisnikh-kopalin-pidvodnikh-rodovishh-ta-bagatofunkcionalna-sistema-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб збору корисних копалин підводних родовищ та багатофункціональна система для його реалізації</a>
Спосіб ерліфтного підйому компонентів підводних родовищ корисних копалин та система для його реалізації
Номер патенту: 84608
Опубліковано: 10.11.2008
Автори: Кириченко Євген Олексійович, Євтєєв Володимир Васильович, Кириченко Володимир Євгенович, Саксонов Геннадій Михайлович, Шворак Віталій Григорович
МПК: F04F 1/20, E21C 45/00
Мітки: родовищ, компонентів, ерліфтного, корисних, реалізації, підводних, підйому, копалин, система, спосіб
Формула / Реферат:
1. Спосіб ерліфтного підйому компонентів підводних родовищ корисних копалин, що включає підйом елементів підводних родовищ корисних копалин у складі гідросуміші, створення багатокомпонентної суміші після надходження стисненого повітря в потік гідросуміші, транспортування потоку багатокомпонентної суміші в підйомній трубі морського ерліфта, подачу стисненого повітря в окремий потік води з наступним транспортуванням стисненого повітря у складі...
Спосіб збагачення корисних копалин підводних родовищ та система для його реалізації
Номер патенту: 82228
Опубліковано: 25.03.2008
Автори: Півняк Геннадій Григорович, Єгурнов Олександр Іванович, Франчук Всеволод Петрович, Шворак Віталій Григорович, Кириченко Євген Олексійович
МПК: F04F 1/20, E21C 45/00
Мітки: спосіб, родовищ, підводних, збагачення, реалізації, система, корисних, копалин
Формула / Реферат:
1. Спосіб збагачення корисних копалин підводних родовищ, що включає підйом елементів прошарку дна водоймища, який розробляється, у складі гідросуміші, створення багатокомпонентної суміші після надходження стисненого повітря в потік гідросуміші, транспортування потоку багатокомпонентної суміші в підйомній трубі ерліфта, утворення окремого потоку води, подачу стисненого повітря в окремий потік води з наступним транспортуванням стисненого...
Спосіб електрифікації технології підводної розробки родовищ корисних копалин та система для його реалізації
Номер патенту: 82229
Опубліковано: 25.03.2008
Автори: Кириченко Євген Олексійович, Єгурнов Олександр Іванович, Євтєєв Володимир Васильович, Франчук Всеволод Петрович, Півняк Геннадій Григорович
МПК: F04F 1/20, E21C 45/00
Мітки: підводної, корисних, електрифікації, спосіб, родовищ, технології, система, реалізації, розробки, копалин
Формула / Реферат:
1. Спосіб електрифікації технології підводної розробки родовищ корисних копалин, що включає підйом елементів підводних родовищ корисних копалин у складі гідросуміші, створення багатокомпонентної суміші після надходження стисненого повітря в потік гідросуміші, транспортування потоку багатокомпонентної суміші після надходження стисненого повітря в потік гідросуміші, транспортування потоку багатокомпонентної суміші в підйомній трубі ерліфта,...
Спосіб транспортування схильних до агломерації корисних копалин підводних родовищ
Номер патенту: 88731
Опубліковано: 10.11.2009
Автори: Кириченко Євген Олексійович, Татуревич Артем Аркадійович, Романюков Артем Валерійович, Євтєєв Володимир Васильович
Мітки: транспортування, родовищ, копалин, підводних, агломерації, спосіб, схильних, корисних
Формула / Реферат:
1. Спосіб транспортування схильних до агломерації корисних копалин підводних родовищ, який включає підйом з великих глибин, створених компонентами корисних копалин, підводних родовищ елементів гірничої маси в потоці транспортуючого середовища, що рухається у поставі транспортного трубопроводу, який відрізняється тим, що попередньо задають умову співвідношення мінімального значення робочої величини концентрації антикоагулянту в хімічному...
Спосіб підвищення ефективності розробки підводних родовищ корисних копалин
Номер патенту: 89250
Опубліковано: 11.01.2010
Автори: Шворак Віталій Григорович, Кириченко Євген Олексійович, Кириченко Володимир Євгенович, Бешта Олександр Степанович, Євтєєв Володимир Васильович
МПК: F04F 1/00, E21C 45/00
Мітки: спосіб, ефективності, корисних, копалин, підвищення, підводних, родовищ, розробки
Формула / Реферат:
1. Спосіб підвищення ефективності розробки підводних родовищ корисних копалин, який включає підйом утворених компонентами підводних родовищ корисних копалин елементів гірничої маси в потоці транспортуючого середовища, що рухається в поставі транспортного трубопроводу, який відрізняється тим, що попередньо виконують геологічне дослідження підводних родовищ корисних копалин та задають величину робочої витрати первинно збагаченої гірничої маси...
Попередній патент: Радіаційний монітор
Наступний патент: Спосіб визначення екологічного стану водойм
Випадковий патент: Напрямний апарат та діафрагма напрямного апарата в газотурбінному двигуні