Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків
Номер патенту: 89546
Опубліковано: 25.04.2014
Автори: Петровський Микола Сергійович, Кокряцька Наталья Іванівна, Тимченко Леонід Іванович, П'яних Павло Андрійович
Формула / Реферат
Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків, що містить лічильник, блок обчислення координат, інформаційний вхід та входи керування, а також вихідний мультиплексор, який відрізняється тим, що у нього введено вхідний буфер, блок проміжного зберігання та блок класифікації зображень вихід якого підключений до другого виходу пристрою, перший вхід до виходу буфера, п'ятий вхід з'єднаний з третім входом дозволу роботи, другий вхід під'єднаний до другого виходу блока проміжного зберігання, перший вихід якого з'єднаний з вихідним мультиплексором, вихід якого з'єднаний з першим виходом пристрою, а третій вхід з входом вибору даних, четвертий вихід блока проміжного зберігання з'єднаний з другим входом дозволу роботи, а першим входом з'єднаний з виходом блока обчислення координат, п'ятий вхід якого з'єднаний з першим входом дозволу роботи, перший вхід якого з'єднаний з інформаційним входом приладу та першим входом буфера, а другий вхід з'єднаний з першим виходом лічильника, вхід якого з'єднаний з входом тактової частоти, що також з'єднана з третіми входами блока обчислення координат і блока класифікації зображень, другими входами блока проміжного зберігання і буфера, вхід асинхронного скидання з'єднаний з другими входами лічильника і вихідного мультиплексора, третім входом блока проміжного зберігання даних та четвертими входами блока обчислення координат і блока класифікації зображень.
Текст
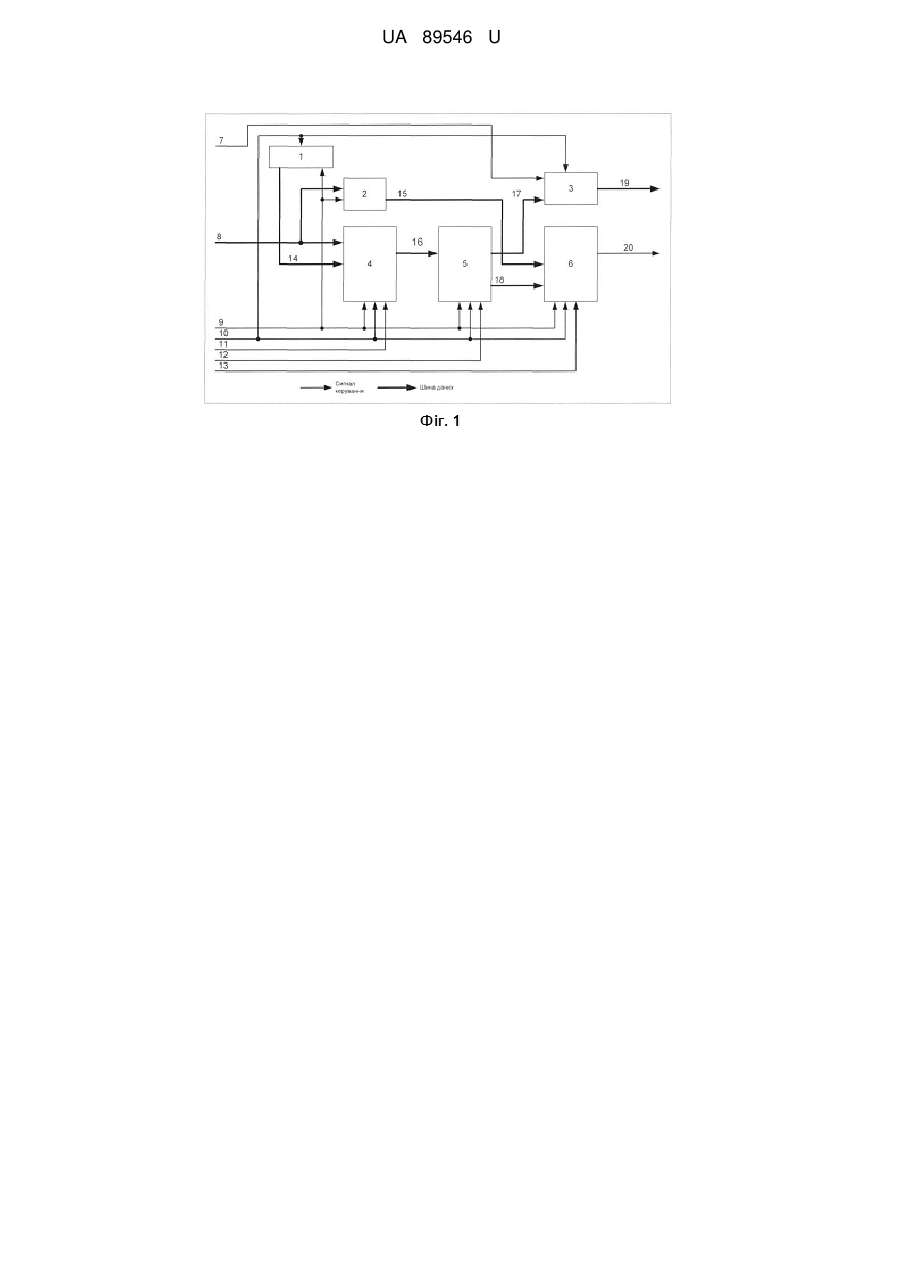
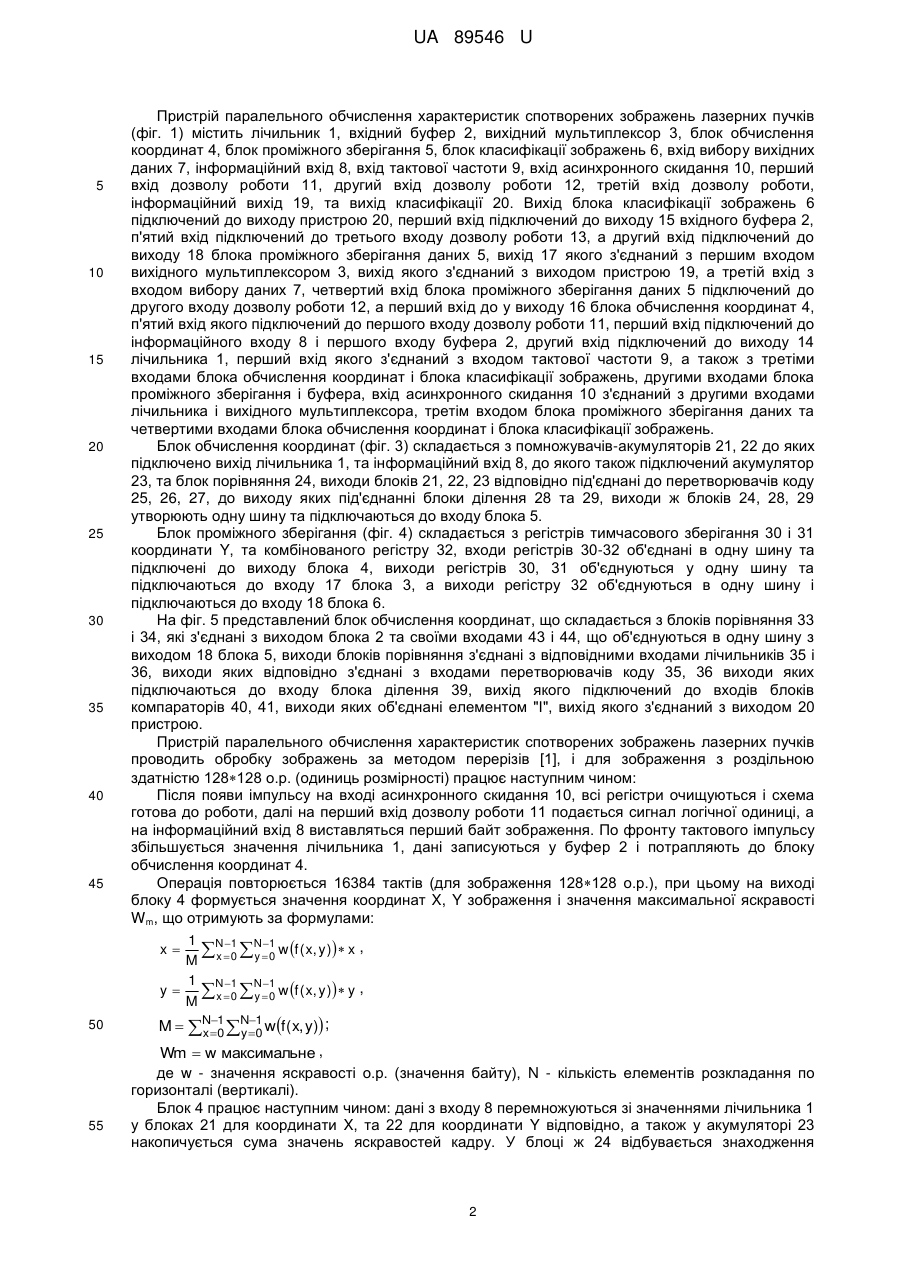
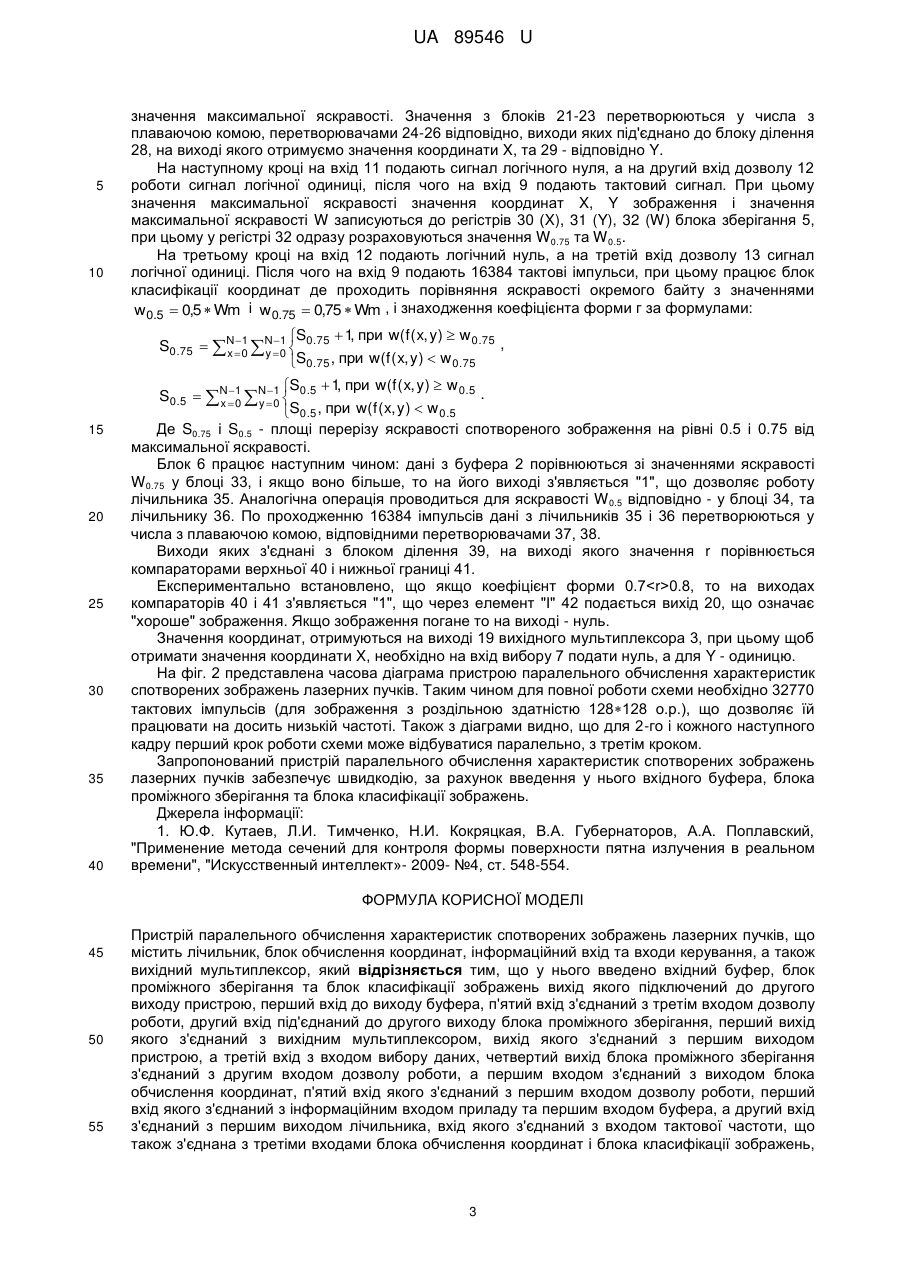
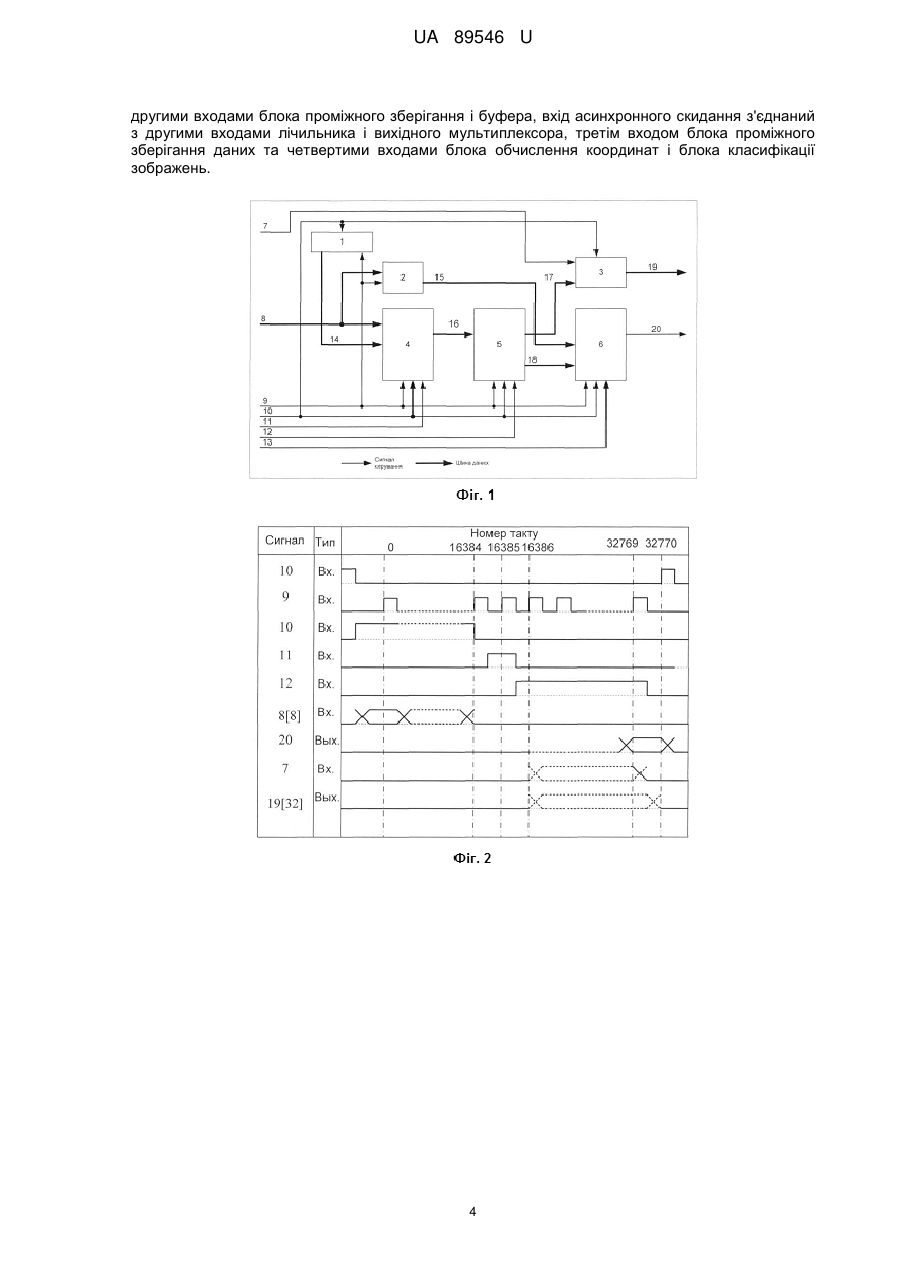
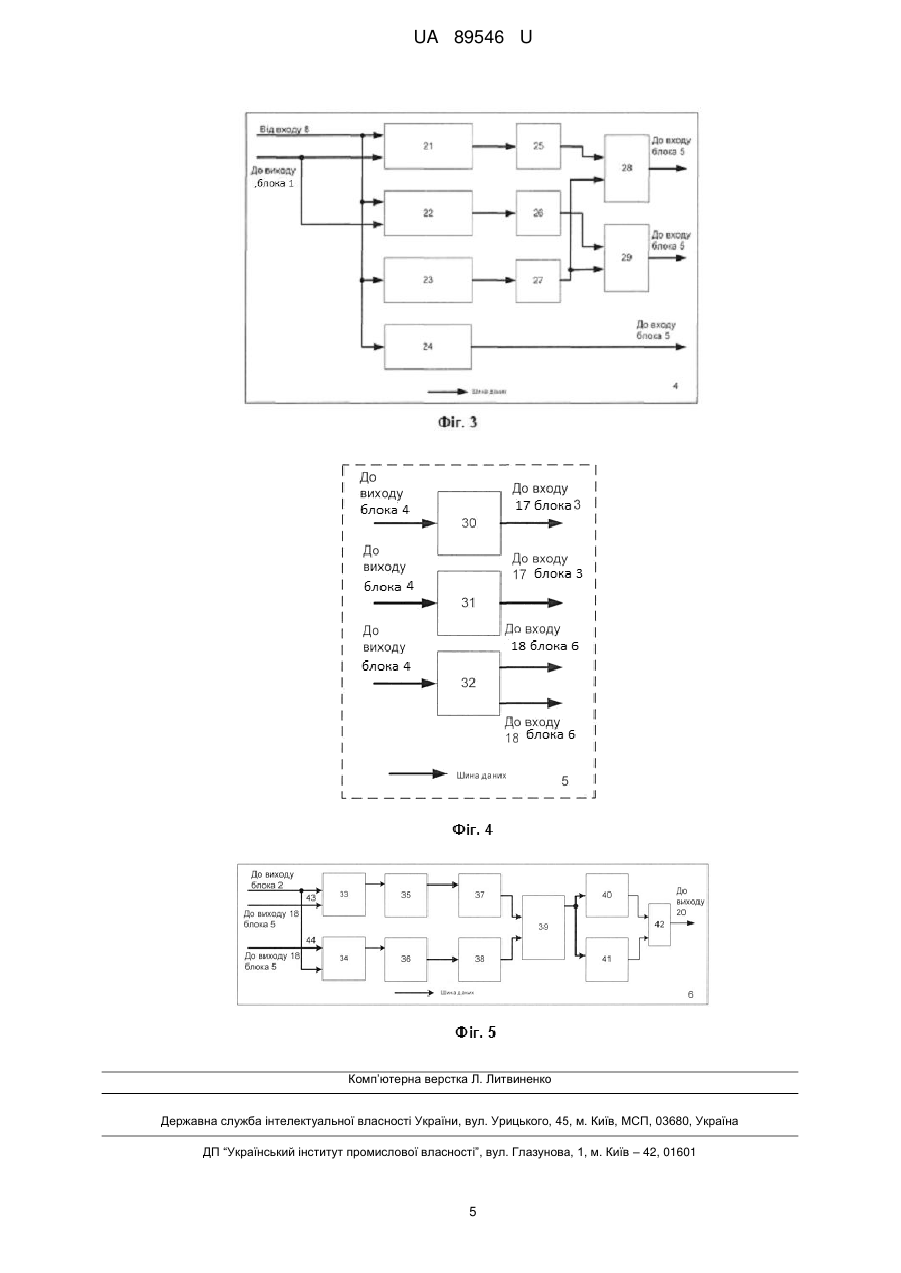
Реферат: Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків містить лічильник, блок обчислення координат, інформаційний вхід та входи керування, а також вихідний мультиплексор, вхідний буфер, блок проміжного зберігання та блок класифікації зображень вихід якого підключений до другого виходу пристрою, перший вхід до виходу буфера, п'ятий вхід з'єднаний з третім входом дозволу роботи, другий вхід під'єднаний до другого виходу блока проміжного зберігання, перший вихід якого з'єднаний з вихідним мультиплексором, вихід якого з'єднаний з першим виходом пристрою, а третій вхід з входом вибору даних, четвертий вихід блока проміжного зберігання з'єднаний з другим входом дозволу роботи, а першим входом з'єднаний з виходом блока обчислення координат, п'ятий вхід якого з'єднаний з першим входом дозволу роботи, перший вхід якого з'єднаний з інформаційним входом приладу та першим входом буфера, а другий вхід з'єднаний з першим виходом лічильника, вхід якого з'єднаний з входом тактової частоти, що також з'єднана з третіми входами блока обчислення координат і блока класифікації зображень, другими входами блока проміжного зберігання і буфера, вхід асинхронного скидання з'єднаний з другими входами лічильника і вихідного мультиплексора, третім входом блока проміжного зберігання даних та четвертими входами блока обчислення координат і блока класифікації зображень. UA 89546 U (54) ПРИСТРІЙ ПАРАЛЕЛЬНОГО ОБЧИСЛЕННЯ ХАРАКТЕРИСТИК СПОТВОРЕНИХ ЗОБРАЖЕНЬ ЛАЗЕРНИХ ПУЧКІВ UA 89546 U UA 89546 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі обчислювальної техніки і може бути використана в пристроях обробки зображень і в системах передачі даних за допомогою лазерного променя (атмосферно-оптичних лініях зв'язку). Відомий пристрій виділення контуру на основі низькочастотної фільтрації (патент на корисну модель UA 42953 U, G06K 9/20), що містить два низькочастотні фільтри, схему віднімання, який відрізняється тим, що в нього введено послідовно розташовані та електрично з'єднані пристрій введення, пристрій виведення, блок двопортової пам'яті, входи якого пов'язані з виходами пристрою введення, а виходи пов'язані з входами низькочастотних фільтрів, виходи яких пов'язані з входами схеми віднімання, вихід якої пов'язаний з входом пристрою виведення. Недоліком даного пристрою є можливість використання лише для попередньої обробки зображення з метою вилучення зашумлених зображень. Відомий пристрій для визначення координат енергетичного центру зображення світлової плями (патент на корисну модель UA 28111 U, G06K 9/46), що містить фотоприймальний блок у вигляді фотоматриці, блок керування та обробки даних, який відрізняється тим, що в нього введено аналогово-цифровий перетворювач, вхід якого пов'язаний з виходом фотоматриці, а вихід є входом блока керування та обробки даних, системи горизонтального та вертикального зсуву, входи яких пов'язані з виходами блока керування та обробки даних і механічно пов'язані з фотоматрицею. Недоліком даного пристрою є низька швидкодія через те, що для визначення координат зображення плями її необхідно зсувати по осям координат фотоматриці х і у, і також велика кількість обчислень. Найбільш близьким аналогом є пристрій, що реалізується способом знаходження центру тяжіння зображення (патент RU 2013029 С1, H04N17/00), який містить телекамеру, що з'єднана з аналогово-цифровим перетворювачем, виходи якого з'єднані з накопичувальним суматором і блок керування, що має інвертор, перший, другий, третій блоки співпадіння, дві схеми виділення заднього фронту, два лічильники й десять виходів, що з'єднані з восьма накопичувальними суматорами, виходи яких з'єднані з шістьма комбінаційними суматорами, що під'єднані до обчислювача. Недоліком даного пристрою є: необхідність сортування вхідного зображення на два масиви, що ускладнюють обчислення, та виконання частини операцій на окремій ЕОМ (а саме операції ділення), а також даний пристрій не може одночасно класифікувати зображення. В основу корисної моделі поставлено задачу створення паралельного обчислення характеристик спотворених зображень лазерних пучків, у якому за рахунок введення елементів класифікації зображення та тимчасового зберігання даних збільшується швидкодія системи, а також за рахунок модульності з'являється можливість простої переробки пристрою для зображень різної розмірності. Поставлена здача вирішується тим, що пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків, що містить лічильник, блок обчислення координат, інформаційний вхід та входи керування, а також вихідний мультиплексор, відрізняється тим, що у нього введено вхідний буфер, блок проміжного зберігання та блок класифікації зображень, вихід якого підключений до другого виходу пристрою, перший вхід до виходу буфера, п'ятий вхід з'єднаний з третім входом дозволу роботи, другий вхід під'єднаний до другого виходу блока проміжного зберігання, перший вихід якого з'єднаний з вихідним мультиплексором, вихід якого з'єднаний з першим виходом пристрою, а третій вхід з входом вибору даних, четвертий вихід блока проміжного зберігання з'єднаний з другим входом дозволу роботи, а першим входом з'єднаний з виходом блока обчислення координат, п'ятий вхід якого з'єднаний з першим входом дозволу роботи, перший вхід якого з'єднаний з інформаційним входом приладу та першим входом буфера, а другий вхід з'єднаний з першим виходом лічильника, вхід якого з'єднаний з входом тактової частоти, що також з'єднана з третіми входами блока обчислення координат і блока класифікації зображень, другими входами блока проміжного зберігання і буфера, вхід асинхронного скидання з'єднаний з другими входами лічильника і вихідного мультиплексора, третім входом блока проміжного зберігання даних та четвертими входами блока обчислення координат і блока класифікації зображень. На фіг. 1 представлена функціональна схема паралельного обчислення характеристик спотворених зображень лазерних пучків; на фіг. 2 - часова діаграма пристрою паралельного обчислення характеристик спотворених зображень лазерних пучків; на фіг. 3 - блок обчислення координат; на фіг. 4 - блок проміжного зберігання даних; на фіг. 5 - блок класифікації зображень. 1 UA 89546 U 5 10 15 20 25 30 35 40 45 50 55 Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків (фіг. 1) містить лічильник 1, вхідний буфер 2, вихідний мультиплексор 3, блок обчислення координат 4, блок проміжного зберігання 5, блок класифікації зображень 6, вхід вибору вихідних даних 7, інформаційний вхід 8, вхід тактової частоти 9, вхід асинхронного скидання 10, перший вхід дозволу роботи 11, другий вхід дозволу роботи 12, третій вхід дозволу роботи, інформаційний вихід 19, та вихід класифікації 20. Вихід блока класифікації зображень 6 підключений до виходу пристрою 20, перший вхід підключений до виходу 15 вхідного буфера 2, п'ятий вхід підключений до третього входу дозволу роботи 13, а другий вхід підключений до виходу 18 блока проміжного зберігання даних 5, вихід 17 якого з'єднаний з першим входом вихідного мультиплексором 3, вихід якого з'єднаний з виходом пристрою 19, а третій вхід з входом вибору даних 7, четвертий вхід блока проміжного зберігання даних 5 підключений до другого входу дозволу роботи 12, а перший вхід до у виходу 16 блока обчислення координат 4, п'ятий вхід якого підключений до першого входу дозволу роботи 11, перший вхід підключений до інформаційного входу 8 і першого входу буфера 2, другий вхід підключений до виходу 14 лічильника 1, перший вхід якого з'єднаний з входом тактової частоти 9, а також з третіми входами блока обчислення координат і блока класифікації зображень, другими входами блока проміжного зберігання і буфера, вхід асинхронного скидання 10 з'єднаний з другими входами лічильника і вихідного мультиплексора, третім входом блока проміжного зберігання даних та четвертими входами блока обчислення координат і блока класифікації зображень. Блок обчислення координат (фіг. 3) складається з помножувачів-акумуляторів 21, 22 до яких підключено вихід лічильника 1, та інформаційний вхід 8, до якого також підключений акумулятор 23, та блок порівняння 24, виходи блоків 21, 22, 23 відповідно під'єднані до перетворювачів коду 25, 26, 27, до виходу яких під'єднанні блоки ділення 28 та 29, виходи ж блоків 24, 28, 29 утворюють одну шину та підключаються до входу блока 5. Блок проміжного зберігання (фіг. 4) складається з регістрів тимчасового зберігання 30 і 31 координати Y, та комбінованого регістру 32, входи регістрів 30-32 об'єднані в одну шину та підключені до виходу блока 4, виходи регістрів 30, 31 об'єднуються у одну шину та підключаються до входу 17 блока 3, а виходи регістру 32 об'єднуються в одну шину і підключаються до входу 18 блока 6. На фіг. 5 представлений блок обчислення координат, що складається з блоків порівняння 33 і 34, які з'єднані з виходом блока 2 та своїми входами 43 і 44, що об'єднуються в одну шину з виходом 18 блока 5, виходи блоків порівняння з'єднані з відповідними входами лічильників 35 і 36, виходи яких відповідно з'єднані з входамиперетворювачів коду 35, 36 виходи яких підключаються до входу блока ділення 39, вихід якого підключений до входів блоків компараторів 40, 41, виходи яких об'єднані елементом "І", вихід якого з'єднаний з виходом 20 пристрою. Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків проводить обробку зображень за методом перерізів [1], і для зображення з роздільною здатністю 128128 о.р. (одиниць розмірності) працює наступним чином: Після появи імпульсу на вході асинхронного скидання 10, всі регістри очищуються і схема готова до роботи, далі на перший вхід дозволу роботи 11 подається сигнал логічної одиниці, а на інформаційний вхід 8 виставляться перший байт зображення. По фронту тактового імпульсу збільшується значення лічильника 1, дані записуються у буфер 2 і потрапляють до блоку обчислення координат 4. Операція повторюється 16384 тактів (для зображення 128128 о.р.), при цьому на виході блоку 4 формується значення координат X, Y зображення і значення максимальної яскравості W m, що отримують за формулами: 1 1 1 x N 0 N 0 w f ( x, y ) x , y M x 1 1 1 y N 0 N 0 w f ( x, y ) y , y M x 1 1 M N0 N0 wf ( x, y) ; x y Wm w максимальне , де w - значення яскравості о.р. (значення байту), N - кількість елементів розкладання по горизонталі (вертикалі). Блок 4 працює наступним чином: дані з входу 8 перемножуються зі значеннями лічильника 1 у блоках 21 для координати X, та 22 для координати Y відповідно, а також у акумуляторі 23 накопичується сума значень яскравостей кадру. У блоці ж 24 відбувається знаходження 2 UA 89546 U 5 10 значення максимальної яскравості. Значення з блоків 21-23 перетворюються у числа з плаваючою комою, перетворювачами 24-26 відповідно, виходи яких під'єднано до блоку ділення 28, на виході якого отримуємо значення координати X, та 29 - відповідно Y. На наступному кроці на вхід 11 подають сигнал логічного нуля, а на другий вхід дозволу 12 роботи сигнал логічної одиниці, після чого на вхід 9 подають тактовий сигнал. При цьому значення максимальної яскравості значення координат X, Y зображення і значення максимальної яскравості W записуються до регістрів 30 (X), 31 (Y), 32 (W) блока зберігання 5, при цьому у регістрі 32 одразу розраховуються значення W 0.75 та W 0.5. На третьому кроці на вхід 12 подають логічний нуль, а на третій вхід дозволу 13 сигнал логічної одиниці. Після чого на вхід 9 подають 16384 тактові імпульси, при цьому працює блок класифікації координат де проходить порівняння яскравості окремого байту з значеннями w 0.5 0,5 Wm і w 0.75 0,75 Wm , і знаходження коефіцієнта форми г за формулами: , 1 1 S0.75 1 при w( f ( x, y ) w 0.75 , S0.75 N 0 N 0 x y S0.75 , при w( f ( x, y ) w 0.75 15 20 25 30 35 40 , 1 1 S0.5 1 при w ( f ( x, y ) w 0.5 . S0.5 N 0 N 0 x y S0.5 , при w( f ( x, y ) w 0.5 Де S0.75 і S0.5 - площі перерізу яскравості спотвореного зображення на рівні 0.5 і 0.75 від максимальної яскравості. Блок 6 працює наступним чином: дані з буфера 2 порівнюються зі значеннями яскравості W 0.75 у блоці 33, і якщо воно більше, то на його виході з'являється "1", що дозволяє роботу лічильника 35. Аналогічна операція проводиться для яскравості W 0.5 відповідно - у блоці 34, та лічильнику 36. По проходженню 16384 імпульсів дані з лічильників 35 і 36 перетворюються у числа з плаваючою комою, відповідними перетворювачами 37, 38. Виходи яких з'єднані з блоком ділення 39, на виході якого значення r порівнюється компараторами верхньої 40 і нижньої границі 41. Експериментально встановлено, що якщо коефіцієнт форми 0.70.8, то на виходах компараторів 40 і 41 з'являється "1", що через елемент "І" 42 подається вихід 20, що означає "хороше" зображення. Якщо зображення погане то на виході - нуль. Значення координат, отримуються на виході 19 вихідного мультиплексора 3, при цьому щоб отримати значення координати X, необхідно на вхід вибору 7 подати нуль, а для Y - одиницю. На фіг. 2 представлена часова діаграма пристрою паралельного обчислення характеристик спотворених зображень лазерних пучків. Таким чином для повної роботи схеми необхідно 32770 тактових імпульсів (для зображення з роздільною здатністю 128128 о.р.), що дозволяє їй працювати на досить низькій частоті. Також з діаграми видно, що для 2-го і кожного наступного кадру перший крок роботи схеми може відбуватися паралельно, з третім кроком. Запропонований пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків забезпечує швидкодію, за рахунок введення у нього вхідного буфера, блока проміжного зберігання та блока класифікації зображень. Джерела інформації: 1. Ю.Ф. Кутаев, Л.И. Тимченко, Н.И. Кокряцкая, В.А. Губернаторов, А.А. Поплавский, "Применение метода сечений для контроля формы поверхности пятна излучения в реальном времени", "Искусственный интеллект»- 2009- №4, ст. 548-554. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків, що містить лічильник, блок обчислення координат, інформаційний вхід та входи керування, а також вихідний мультиплексор, який відрізняється тим, що у нього введено вхідний буфер, блок проміжного зберігання та блок класифікації зображень вихід якого підключений до другого виходу пристрою, перший вхід до виходу буфера, п'ятий вхід з'єднаний з третім входом дозволу роботи, другий вхід під'єднаний до другого виходу блока проміжного зберігання, перший вихід якого з'єднаний з вихідним мультиплексором, вихід якого з'єднаний з першим виходом пристрою, а третій вхід з входом вибору даних, четвертий вихід блока проміжного зберігання з'єднаний з другим входом дозволу роботи, а першим входом з'єднаний з виходом блока обчислення координат, п'ятий вхід якого з'єднаний з першим входом дозволу роботи, перший вхід якого з'єднаний з інформаційним входом приладу та першим входом буфера, а другий вхід з'єднаний з першим виходом лічильника, вхід якого з'єднаний з входом тактової частоти, що також з'єднана з третіми входами блока обчислення координат і блока класифікації зображень, 3 UA 89546 U другими входами блока проміжного зберігання і буфера, вхід асинхронного скидання з'єднаний з другими входами лічильника і вихідного мультиплексора, третім входом блока проміжного зберігання даних та четвертими входами блока обчислення координат і блока класифікації зображень. 4 UA 89546 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюTymchenko Leonid Ivanovych
Автори російськоюТимченко Леонид Иванович
МПК / Мітки
МПК: H03M 13/00
Мітки: спотворених, пучків, паралельного, лазерних, характеристик, пристрій, обчислення, зображень
Код посилання
<a href="https://ua.patents.su/7-89546-pristrijj-paralelnogo-obchislennya-kharakteristik-spotvorenikh-zobrazhen-lazernikh-puchkiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій паралельного обчислення характеристик спотворених зображень лазерних пучків</a>
Пристрій виділення контуру слабоконтрастних розмитих зображень
Номер патенту: 73138
Опубліковано: 10.09.2012
Автори: Микулка Ірина Володимирівна, Білинський Йосип Йосипович
МПК: G06K 9/20
Мітки: зображень, розмитих, слабоконтрастних, контуру, виділення, пристрій
Формула / Реферат:
Пристрій виділення контуру слабоконтрастних розмитих зображень, який містить схему віднімання, який відрізняється тим, що в нього введено інтерфейс введення, який послідовно з'єднаний з паралельними блоками аналізу гістограми, виводи яких пов'язані з входами комутатора, вивід якого з'єднано з входом регістра, виводи якого пов'язані з входами блока порівняння, виходи якого почергово з'єднані з двома паралельними регістрами, виходи яких...
Пристрій для обчислення усіченого перетворення фур’є в остаточних класах
Номер патенту: 4264
Опубліковано: 17.01.2005
Автори: Дуденко Сергій Васильович, Сумцов Дмитро Вікторович, Рубан Ігор Вікторович, Третяк В'ячеслав Федорович
МПК: G06F 7/04, G06F 7/495
Мітки: класах, усіченого, обчислення, перетворення, пристрій, фур'є, остаточних
Формула / Реферат:
Пристрій для обчислення усіченого перетворення Фур'є в остаточних класах, який містить блок оперативної пам'яті, перший, другий, третій та четвертий блоки постійної пам'яті, перший, другий та третій блоки, які реалізують операцію складання по модулю два, перший, другий, третій та четвертий допоміжні блоки постійної пам'яті, перший, другий, третій та четвертий регістри, блок управління, до складу якого входять генератор тактових імпульсів,...
Пристрій для обчислення показникової функції

Номер патенту: 34951
Опубліковано: 26.08.2008
Автори: Баранов Георгій Леонідович, Баранов Володимир Леонідович, Жуков Ігор Анатолійович, Мартинова Оксана Петрівна
МПК: G06F 7/544
Мітки: обчислення, пристрій, показникової, функції
Формула / Реферат:
Пристрій для обчислення показникової функції, який містить три регістри, перший комутатор, перетворювач кодів і блок керування, причому інформаційні входи пристрою з'єднані з інформаційними входами першого регістра, виходи другого регістра з'єднані з інформаційними входами третього регістра, перший вихід блока керування з'єднаний з установочними входами першого, другого і третього регістрів, другий вихід блока керування з'єднаний з керуючим...
Пристрій для обчислення сигмоїдальної функції
Номер патенту: 75455
Опубліковано: 17.04.2006
Автори: Баранов Георгій Леонідович, Жуков Ігор Анатолійович, Кременецький Георгій Миколайович, Баранов Володимир Леонідович
МПК: G06F 17/10, G06F 7/544
Мітки: сигмоїдальної, пристрій, функції, обчислення
Формула / Реферат:
1. Пристрій для обчислення сигмоїдальної функції, який містить три регістри і блок множення, причому інформаційні входи пристрою з'єднані з інформаційними входами першого регістра, а виходи блока множення з'єднані з інформаційними входами другого регістра, який відрізняється тим, що в нього додатково введені три комутатори, перетворювач кодів і блок керування, перший вихід якого з'єднаний з установочними входами першого, другого і третього...
Пристрій для обчислення експоненціальної функції
Номер патенту: 75439
Опубліковано: 17.04.2006
Автори: Жуков Ігор Анатолійович, Баранов Георгій Леонідович, Баранов Володимир Леонідович, Кременецький Георгій Миколайович
МПК: G06F 7/556
Мітки: функції, обчислення, пристрій, експоненціальної
Формула / Реферат:
1. Пристрій для обчислення експоненціальної функції, що містить три регістри, квадратор і зсувач, інформаційні входи якого з'єднані з виходами першого регістра, а виходи другого регістра з'єднані з інформаційними входами третього регістра, який відрізняється тим, що в нього введені перетворювач кодів, комутатор і блок керування, перший вихід котрого з'єднаний з установними входами першого, другого і третього регістрів, друга група виходів...
Попередній патент: Пристрій для обробки отворів
Наступний патент: Перетворювач постійної напруги
Випадковий патент: Гербіцидна композиція