Спосіб побудови та дослідження комп’ютеризованих систем управління та пристрій для його реалізації
Номер патенту: 96317
Опубліковано: 25.10.2011
Автори: Кушпіль Андрій Анатолійович, Прус В'ячеслав В'ячеславович
Формула / Реферат
1. Спосіб побудови та дослідження комп'ютеризованих систем управління, що полягає у попередньому створенні прототипу системи, апробації на ньому алгоритмів управління, визначенні характеристик системи та вимог щодо необхідного набору елементної бази для реалізації реальної системи з використанням засобів віртуального моделювання, який відрізняється тим, що частину функцій прототипу реалізують шляхом цифрового або аналогового моделювання за допомогою електронних моделей відповідно об'єктів дискретної або безперервної дії з можливістю оперативної зміни їх параметрів та структури, з врахуванням нелінійностей об'єктів управління та зовнішніх збурень.
2. Пристрій для побудови та дослідження комп'ютеризованих систем управління, що містить персональну електронно-обчислювальну машину із середовищем візуального програмування для створення віртуальних моделей об'єктів, інтерфейсну плату для вводу/виводу сигналів віртуальних моделей, який відрізняється тим, що для створення електронних моделей об'єктів дискретної та безперервної дії передбачено набір елементарних уніфікованих блоків з використанням елементної бази програмованих логічних інтегральних схем та операційних підсилювачів.
Текст
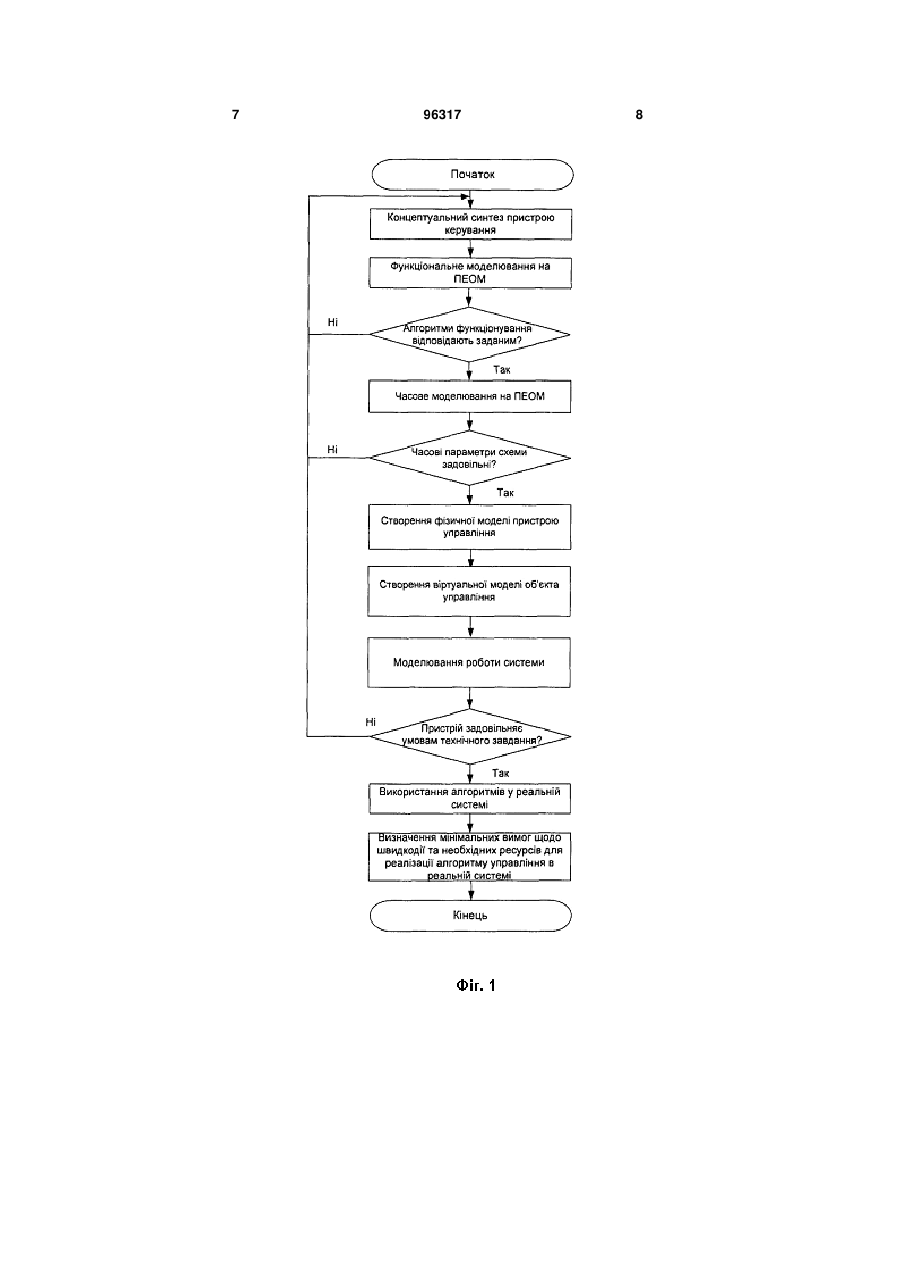
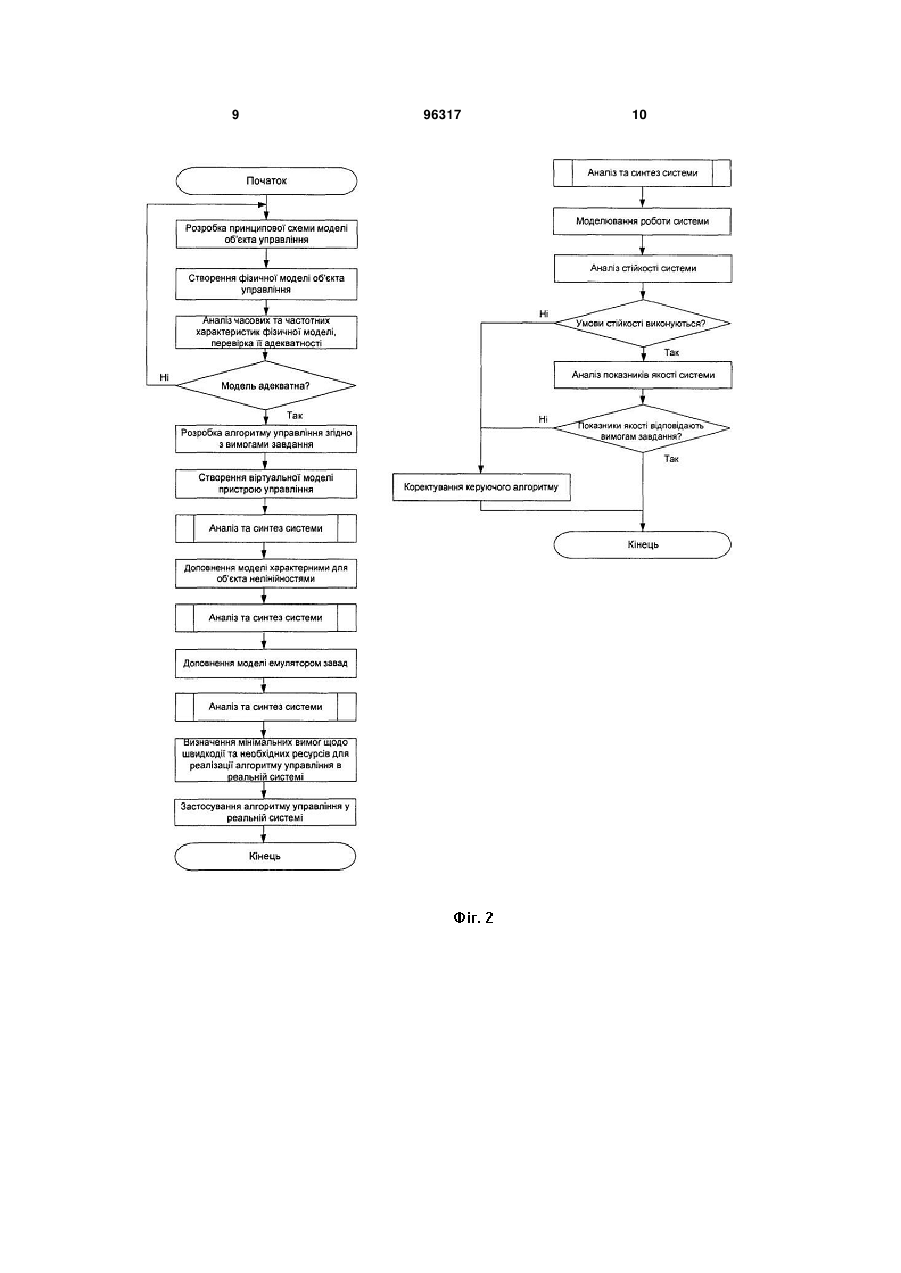
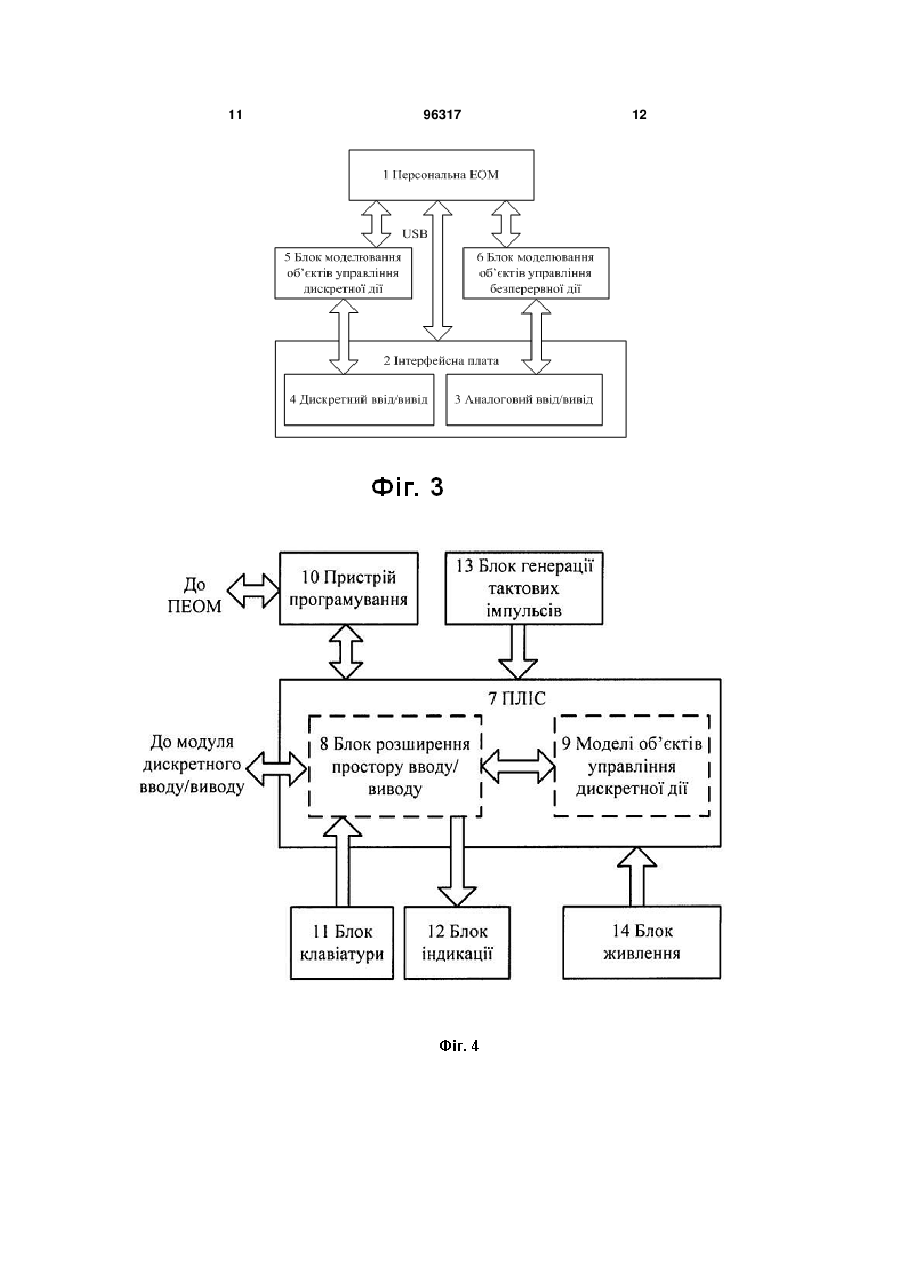
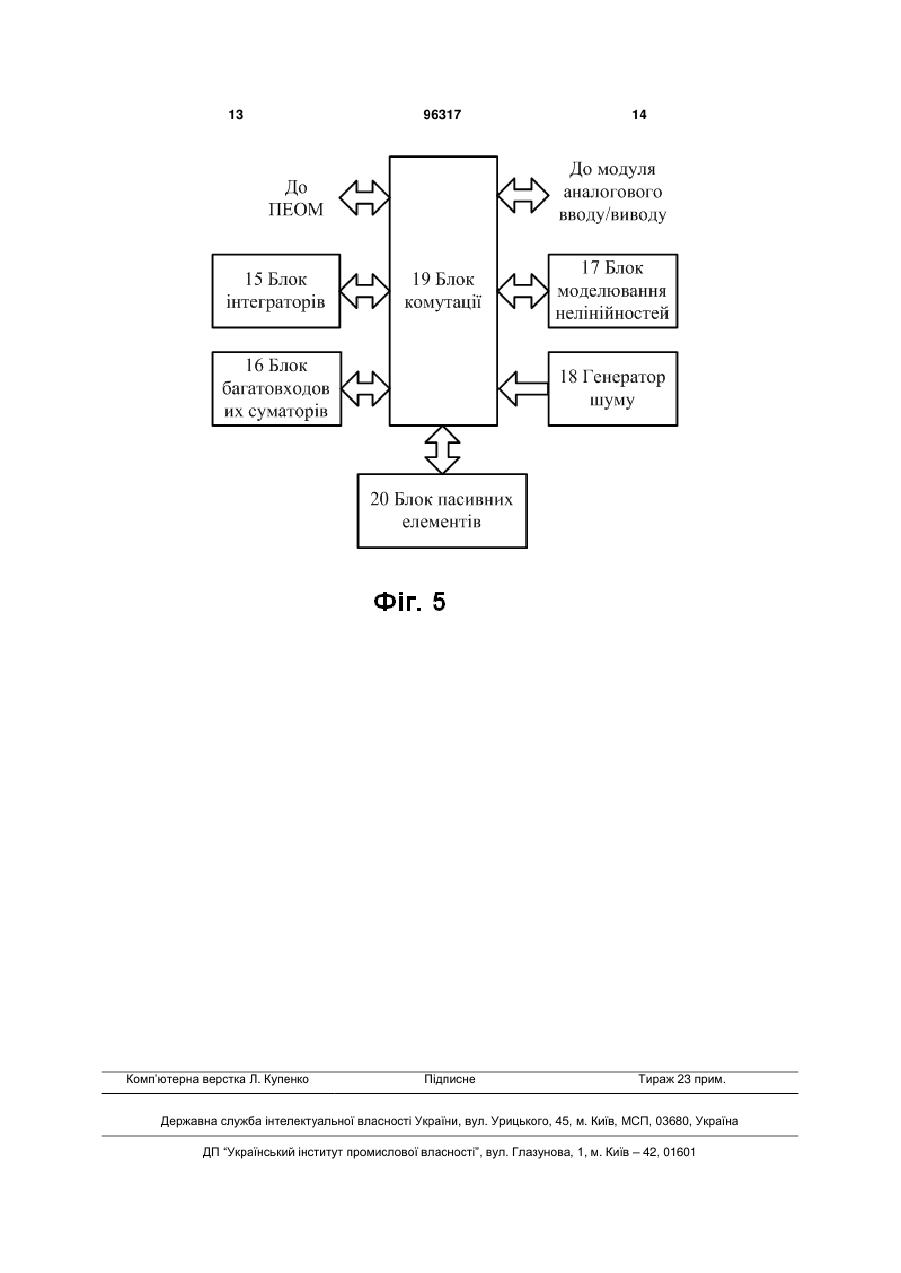
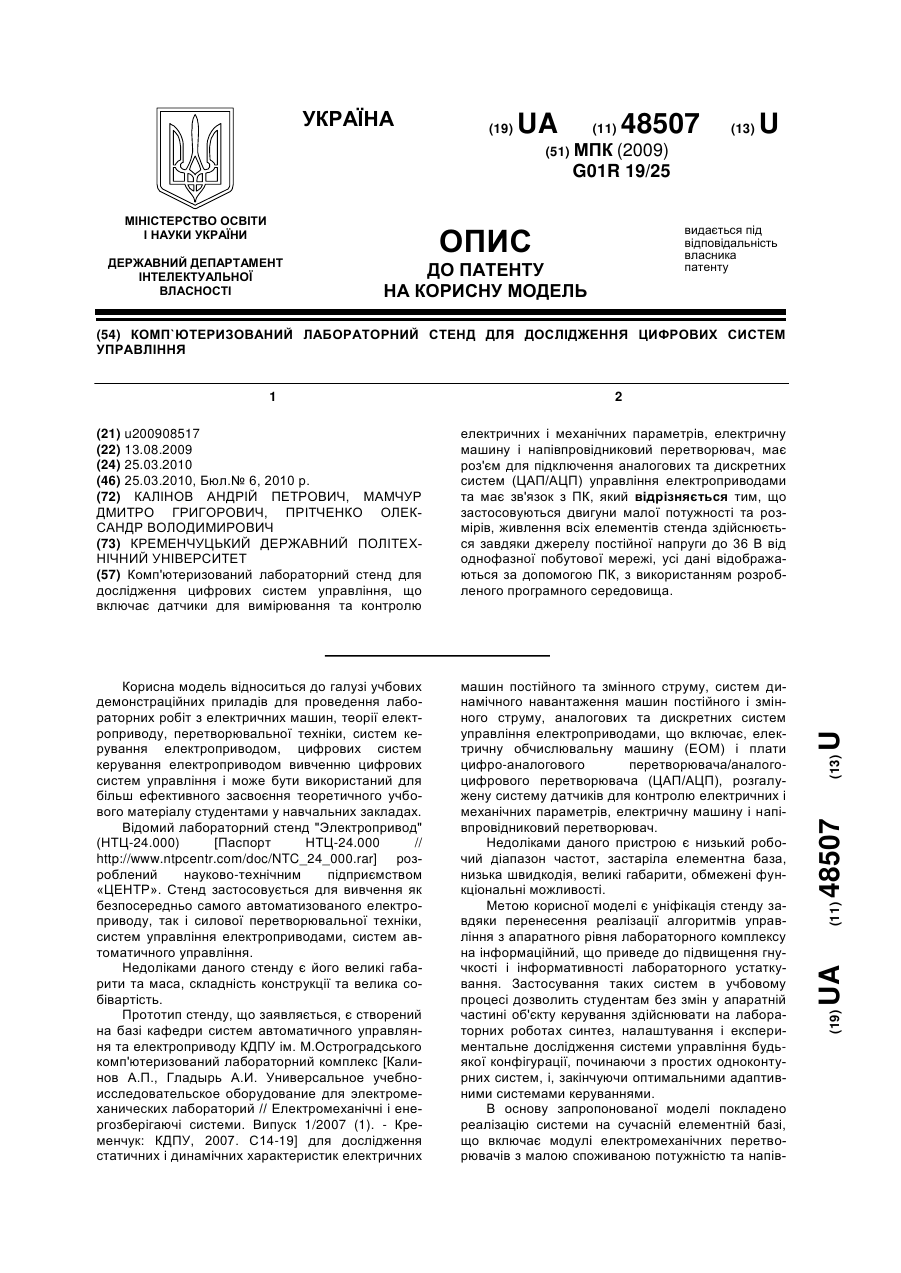
1. Спосіб побудови та дослідження комп'ютеризованих систем управління, що полягає у попередньому створенні прототипу системи, апробації на ньому алгоритмів управління, визначенні характеристик системи та вимог щодо необхідного на C2 2 (19) 1 3 модель-ориентированном проектировании встраиваемых систем управления // Материалы международной конф. «Образовательные, научные и инженерные приложения в среде LABVIEW и технологии National Instruments», M.: РУДН, 2005 стр. 50-58]. Суть способу полягає у попередньому створенні та налагодженні прототипу САУ за допомогою імітаційного та віртуального моделювання у програмних середовищах Matlab та LabView. Отримана в результаті моделювання структура за допомогою засобів автоматичної генерації програмного коду та інтегрованого середовища розробки переноситься у цифровий сигнальний процесор, що є пристроєм керування досліджуваної системи. Після цього здійснюється дослідження роботи системи з урахуванням основних функцій об'єкта управління шляхом безпосередньої фізичної реалізації окремих вузлів системи та їх підключення за допомогою пристроїв вводу/виводу інформації. Недоліком даного способу є складність налагодження та дослідження прототипу системи через високий рівень абстрагування та наявність декількох проміжних етапів від створення її комп'ютерної моделі до впровадження у реальну систему. Даний винахід прийнято як прототип способу. Відомий пристрій, призначений для дослідження цифрових систем керування [Універсальний дослідницький стенд для цифрових систем керування: патент України № 19515, МПК-8: G05В 15/00. Опубл. 15.12.2006, Бюл. № 12], що містить цифрову обчислювальну машину, аналогову обчислювальну машину, адаптер зв'язку, контролер, імітатор навантаження, вимірювачі обертів, двигун, підсилювач потужності. Недоліками пристрою є вузька спеціалізація, пов'язана із дослідженням реального технологічного об'єкта заданої структури; відсутність можливостей дослідження вузлів систем управління об'єктами дискретної дії; складність схемної реалізації, відсутність уніфікованих вузлів для побудови та дослідження систем управління різної конфігурації. Відомий пристрій для розробки та дослідження дискретних та безперервних систем [NI Educational Laboratory Virtual Instrumentation Suite (N1 ELVIS): Hardware User Manual [Electronic Resource] / National Instruments Corporation, April 2006. Mode of access: http://www.ni.com/pdf/manuals/373363d.pdfLast access: 2008. - Title from the screen; Lab VIEW: User Manual [Electronic Resource] / National Instruments Corporation, April 2003. - Mode of access: www.ni.com/pdf/manuals/320999e.pdf. - Last access: 2008. - Title from the screen], що включає макетну плату для монтажу електричних кіл, датчиків, керованих систем, джерело живлення, генератори сигналів, пристроїв вводу/виводу інформації від персональної електронно-обчислювальної машини (ПЕОМ), середовище графічного програмування LabVIEW для обробки інформації. Недоліками даного пристрою є трудомісткість монтажу об'єктів керування та їх імітаторів на макетній платі; надлишковість та недостатня гнучкість апаратних засобів платформи; недостатня 96317 4 наочність процесу проектування з використанням стандартних програмних функцій. Даний винахід прийнято за прототип пристрою. В основу винаходу поставлена задача вдосконалення способів побудови та дослідження комп'ютеризованих систем управління при їх проектуванні, а також при навчанні шляхом створення та дослідження прототипів систем зі спільним використанням віртуальних та електронних моделей об'єктів дискретної (ОДД) та безперервної (ОБД) дії, реалізованих на базі запропонованого пристрою за допомогою набору уніфікованих елементарних електронних вузлів. Це забезпечує можливості: зменшення рівня абстрагування прототипу САУ від реальної системи для кращого розуміння її структури та зменшення часу проектування; проведення оцінки необхідних апаратних ресурсів для реалізації синтезованого алгоритму управління; дослідження роботи систем з об'єктами змінної структури; отримання при навчанні додаткових практичних навичок роботи із засобами електроніки; здійснення всіх етапів проектування без необхідності особливих знань спеціальних інструментальних засобів розробки, що дозволяє при навчанні зосередити всю увагу на методах аналізу та синтезу систем управління; можливість реалізації необхідних функцій на мінімальному наборі стандартного обладнання. Винахід пояснюється за допомогою креслень: фігура 1 - алгоритм синтезу та дослідження САУ ОДД; фігура. 2 - алгоритм синтезу та дослідження САУ ОБД; фігура 3 - структура пристрою для побудови та дослідження комп'ютеризованих систем управління; фігура 4 - імітатор ОДД; фігура 5 - імітатор ОБД. Спосіб реалізується наступним чином. При дослідженні САУ ОБД спосіб передбачає реалізацію об'єктів управління у вигляді електронних моделей, а пристроїв управління - у вигляді віртуальних моделей. При дослідженні САУ ОДД використовуються віртуальні моделі об'єктів управління та моделі пристроїв управління, проімітовані на електронних компонентах. Порядок створення та дослідження прототипу САУ ОДД пояснюється алгоритмом, зображеним на фіг. 1. Проводиться концептуальний синтез пристрою управління на основі вимог технічного завдання, відомостей про об'єкт управління з використанням теорії алгебри логіки, апарата комбінаційних та послідовнісних логічних схем. Здійснюється функціональне та часове моделювання синтезованої структури з використанням програмних засобів. Якщо параметри схеми не задовольняють умови завдання, відбувається повернення до етапу синтезу. В іншому випадку створюється еквівалентна електронна модель пристрою управління, за допомогою віртуальних інструментів реалізується алгоритм об'єкта управління та проводиться спільне моделювання їх роботи, в ході якого перевіряється відпрацювання системою різноманітних, у тому числі аварійних, ситуацій. Якщо результати позитивні, проводять аналіз необхідної кількості та параметрів ресурсів для реалізації 5 отриманої структури пристрою управління для використання у реальній системі. Послідовність процесу дослідження САУ ОБД пояснюється алгоритмом, що зображено на фіг. 2. На основі апріорних даних про структуру технологічного об'єкта створюється його ідеалізована модель: складається математичний опис об'єкта за допомогою апарата диференціальних рівнянь чи передавальних функцій, розробляється та апаратно реалізується еквівалентна принципова схема моделі. За допомогою засобів віртуального моделювання на вході об'єкта генеруються тестові сигнали, аналізуються сигнали виходу та на основі отриманих експериментальних даних із активною участю користувача проводиться перевірка адекватності моделі, процедури синтезу коректуючого пристрою та аналізу показників стійкості та якості системи. Процес синтезу ітеративний, при незадовільних показниках системи проводиться коректування керуючого алгоритму та повторний аналіз САУ. Після досягнення позитивного результату перевіряється грубість керуючого алгоритму при моделюванні збурюючих впливів на об'єкт управління. За необхідності до складу моделі об'єкта вводяться типові нелінійності, після чого повторно проводяться етапи аналізу та синтезу системи. Після завершення тестування прототипу, з урахуванням складності отриманого алгоритму управління та вимог щодо мінімальної частоти квантування, оцінюють необхідні значення параметрів елементної бази для реалізації алгоритму у реальній системі. Принцип роботи пристрою для побудови та дослідження комп'ютеризованих систем управління пояснюється кресленням, де на фіг. 3 показана його структура. Пристрій містить ПЕОМ - 1 з прикладним програмним забезпеченням для здійснення процесу проектування та реалізації віртуальних моделей за допомогою технології графічного програмування; інтерфейсну плату - 2; блок моделювання ОДД - 5 та блок моделювання ОБД - 6 на електронних компонентах з можливостями оперативної зміни їх параметрів та структури. Інтерфейсна плата 2 служить для узгодження ПЕОМ та електронних моделей об'єктів управління. Містить модуль аналогового вводу/виводу 3, де здійснюється цифро-аналогове та аналогоцифрове перетворення сигналів, модуль дискретного вводу/виводу 4, що складається з каналів з дискретними рівнями сигналів. Структура блока моделювання ОДД 5 зображено на фіг. 4. Блок виконано на базі програмованої логічної інтегральної схеми (ПЛІС) 7. До складу програмного проекту для ПЛІС входить блок розширення простору дискретного вводу/виводу 8, що реалізує алгоритм розподілу у часі існуючих фізичних ліній інтерфейсної плати, а також безпосередньо моделі ОДД 9 у вигляді цифрового автомата, комбінаційної схеми. Побудова необхідної моделі здійснюється шляхом конфігурування мікросхеми 96317 6 ПЛІС за допомогою пристрою програмування 10, підключеного до паралельного порту ЕОМ. Додатково для емуляції впливів об'єкта управління та відображення реакції моделі пристрою управління 10 передбачено блок клавіатури 11 та індикації 12. Для формування тактових сигналів різної частоти, напруги вводу/виводу та ядра ПЛІС введено блок генерації тактових імпульсів 13, блок живлення 14. Блок моделювання ОБД 6 (фіг. 5) складається з блока інтеграторів 15 та багатовходових суматорів 16, які виконані за типовими схемами включення операційних підсилювачів. Блок моделювання нелінійностей 17 містить нелінійні функціональні перетворювачі на операційних підсилювачах. Генератор шуму 18 - схемне рішення, призначене для емуляції впливу завад на систему. Створення моделі ОБД необхідної конфігурації здійснюється шляхом механічної комутації каскадів схем за допомогою блока комутації 19 та включення до складу схем пасивних елементів необхідних номіналів зі складу блока пасивних елементів 20. Пристрій працює наступним чином. Перед проведенням моделювання створюють прототип САУ: проводять конфігурування блоків моделювання ОДД 5 та ОБД 6, створюють віртуальні інструменти для реалізацій алгоритмів управління САУ ОБД та об'єкта управління САУ ОДД на ПЕОМ 1. Принцип створення електронної моделі ОДД полягає у вводі попередньо створеного опису алгоритму керування з використанням схемного редактора системи автоматизованого проектування (САПР) для ПЛІС, подальшій компіляції, часовому та функціональному моделюванні та програмуванні ПЛІС засобами САПР та пристрою програмування 10. Принцип створення моделі ОБД полягає у проектуванні принципової схеми, що описує динаміку досліджуваного об'єкта, з використанням елементів блока моделювання ОБД 6 та реалізації цієї схеми. На ПЕОМ 1 за допомогою прикладного програмного забезпечення з використанням технології візуального програмування реалізуються функції пристрою управління САУ ОБД, алгоритми функціонування об'єкта управління САУ ОДД, алгоритми аналізу та синтезу САУ, інтерфейсу з користувачем та іншими апаратними блоками. Взаємодія програмного забезпечення ПЕОМ та інтерфейсної плати 2 здійснюється за допомогою стандартного протоколу USB. Вхідні сигнали модулів аналогового та дискретного вводу/виводу знімаються з виходів відповідно блоків моделювання ОБД 6 та ОДД 5, містять інформацію про поточний стан об'єкта управління безперервної дії та сигнал управління для об'єкта управління дискретної дії. Вихідні сигнали - подаються на входи моделей та є сигналами управління для об'єкта управління безперервної дії та сигналами зворотного зв'язку об'єкта управління дискретної дії. 7 96317 8 9 96317 10 11 96317 12 13 Комп’ютерна верстка Л. Купенко 96317 Підписне 14 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюBuilding and research method for computer-assisted command systems and device for its implementation
Автори англійськоюPrus Viacheslav Viacheslavovych, Kushpil Andrii Anatoliiovych
Назва патенту російськоюСпособ построения и исследования компьютеризированных систем управления и устройство для его реализации
Автори російськоюПрус Вячеслав Вячеславович, Кушпиль Андрей Анатольевич
МПК / Мітки
МПК: G05B 17/00
Мітки: систем, пристрій, комп'ютеризованих, реалізації, спосіб, побудови, управління, дослідження
Код посилання
<a href="https://ua.patents.su/7-96317-sposib-pobudovi-ta-doslidzhennya-kompyuterizovanikh-sistem-upravlinnya-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови та дослідження комп’ютеризованих систем управління та пристрій для його реалізації</a>
Комп`ютеризований лабораторний стенд для дослідження цифрових систем управління
Номер патенту: 48507
Опубліковано: 25.03.2010
Автори: Прітченко Олександр Володимирович, Мамчур Дмитро Григорович, Калінов Андрій Петрович
МПК: G01R 19/25
Мітки: комп`ютеризований, систем, цифрових, управління, дослідження, стенд, лабораторний
Формула / Реферат:
Комп'ютеризований лабораторний стенд для дослідження цифрових систем управління, що включає датчики для вимірювання та контролю електричних і механічних параметрів, електричну машину і напівпровідниковий перетворювач, має роз'єм для підключення аналогових та дискретних систем (ЦАП/АЦП) управління електроприводами та має зв'язок з ПК, який відрізняється тим, що застосовуються двигуни малої потужності та розмірів, живлення всіх елементів...
Спосіб дистанційного управління електроприймачем та пристрій для його реалізації
Номер патенту: 36890
Опубліковано: 16.08.2004
Автори: Дзюбан Віталій Серафимович, Марченко Віктор Миколайович, Діденко Валерій Петрович
МПК: H02J 13/00
Мітки: пристрій, дистанційного, реалізації, управління, електроприймачем, спосіб
Формула / Реферат:
1. Спосіб дистанційного управління електроприймачем, який полягає в тому, що управління виконують за допомогою поста управління по лінії зв'язку означеного поста з джерелом живлення змінної напруги, обмежують струм в лінії зв'язку, шунтують одну полярність живильної напруги в кінці лінії зв'язку, вхідний сигнал порівнюють з опорним сигналом і отриманий в результаті порівняння сигнал використовують для вмикання та вимикання електроприймача,...
Спосіб гальмування механічних систем і пристрій для його реалізації
Номер патенту: 74496
Опубліковано: 15.12.2005
Автори: Боровський Євген Павлович, Мацелевич Павло Михайлович, Малянов Микола Іванович
МПК: B60T 1/00
Мітки: гальмування, спосіб, реалізації, пристрій, механічних, систем
Формула / Реферат:
1. Спосіб гальмування механічних систем, який включає використання гідродинамічного опору робочої рідини, який відрізняється тим, що як гальмівний елемент використовують порожнисту еластичну стрічку, яка містить щонайменше дві гідравлічно сполучені між собою камери, робочу рідину подають щонайменше в одну з камер, збільшуючи її об'єм, і створюють рухому перешкоду у вигляді хвилі, що біжить перед рухомим елементом, жорстко зв'язаним з об'єктом...
Спосіб управління насосною станцією та пристрій для його реалізації
Номер патенту: 62490
Опубліковано: 15.12.2003
Автори: Родькін Дмитро Йосипович, Коренькова Тетяна Валеріївна, Живора Валерій Федорович, Костюк Сергій Миколайович, Перекрест Андрій Леонідович
МПК: F04D 27/00, H02P 5/74
Мітки: станцією, пристрій, управління, реалізації, насосною, спосіб
Формула / Реферат:
1. Спосіб управління насосною станцією, яка включає перший і другий насосні агрегати з електроприводом і засувками на вході та на подачі, що полягає в контролі параметрів насосних агрегатів, регулюванні їхньої продуктивності та тиску за заданим параметром шляхом впливу на швидкість обертання насосних агрегатів, який відрізняється тим, що другий насосний агрегат, обладнаний насосом-турбіною з регульованим електроприводом, включається в...
Спосіб регулювання та перевірки блока управління станції радіотехнічного контролю і пристрій для його реалізації
Номер патенту: 72063
Опубліковано: 17.01.2005
Автори: Смородін Микола Максимович, Яковлев Віталій Васильович, Кікалов Сергій Григорович, РЯБЦЕВ АНАТОЛІЙ МИХАЙЛОВИЧ, Мамигонов Борис Вілорович, Мережко Сергій Олексійович, Передерій Людмила Василівна, Гришко Микола Мефодійович
МПК: G01R 31/28, G05B 23/00, G06F 15/00, G05B 13/00, H04B 3/46, G06F 11/00
Мітки: перевірки, реалізації, управління, контролю, пристрій, спосіб, регулювання, станції, блока, радіотехнічного
Формула / Реферат:
1. Спосіб регулювання та перевірки блока управління станції радіотехнічного контролю, який містить в собі операції комплектування з відповідною комутацією схеми регулювання і перевірки блока управління вимірювальними приладами, джерелами тестових впливів та ЕОМ, підключення схеми регулювання і перевірки до мережі живлення і формування узагальненого показника контролю, який відрізняється тим, що на портах обміну аналоговою та цифровою...
Наступний патент: Світлодіодний індикатор
Випадковий патент: Спосіб профілактики та корекції знижених функціональних можливостей центральної нервової системи