Спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах
Номер патенту: 98433
Опубліковано: 10.05.2012
Автори: Дурманов Максим Анатолійович, Скорик Іван Вікторович, Широков Ігор Борисович

Формула / Реферат
Спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах, що включає задання частоти проходження імпульсів широтно-імпульсної послідовності зовнішнім задавальним генератором, використання вбудованого в мікроконтролер модуля широтно-імпульсної модуляції, вимірювання частоти проходження імпульсів, здійснюване за допомогою вбудованого в мікроконтролер модуля таймер-лічильника і здійснюване шляхом порівняння цієї частоти з частотою високостабільного опорного генератора, який відрізняється тим, що мікроконтролер тактують генератором, керованим напругою, при цьому тактові імпульси високостабільного опорного генератора підраховують таймер-лічильником мікроконтролера, а частоту генератора, керованого напругою, додатково ділять за допомогою подільника із змінним коефіцієнтом ділення до частоти зовнішнього задавального генератора і синхронізують з цією частотою зовнішнього задавального генератора за допомогою кільця фазового автопідстроювання частоти, причому коефіцієнт ділення подільника із змінним коефіцієнтом ділення задають за допомогою мікроконтролера, подаючи відповідний код, що керує, з виходу керування мікроконтролера на вхід керування подільника із змінним коефіцієнтом ділення, при цьому величину коефіцієнта ділення визначають шляхом вимірювання частоти проходження імпульсів генератора, керованого напругою, здійснюване шляхом порівняння її з частотою високостабільного опорного генератора, при цьому змінюють коефіцієнт ділення подільника із змінним коефіцієнтом ділення кожного разу при наближенні частоти генератора, керованого напругою, до верхньої або нижньої межі його діапазону перебудови частоти, при цьому запобігаючий нестійкій роботі системи гістерезис вводять програмно, а скважність вихідної широтно-імпульсної послідовності задають за допомогою вбудованого в мікроконтролер модуля широтно-імпульсної модуляції шляхом введення в мікроконтролер двійкового коду будь-яким доступним способом, наприклад за допомогою будь-якого стандартного цифрового інтерфейсу або за допомогою вбудованого в мікроконтролер модуля аналогово-цифрового перетворювача, подаючи на його вхід деякий рівень постійної напруги, при цьому зовнішнім індикатором, підключеним до виходу мікроконтролера, відображають частоту проходження широтно-імпульсної послідовності і задане значення скважності, а вихідну широтно-імпульсну послідовність формують на виході мікроконтролера, який відповідає виходу вбудованого модуля широтно-імпульсної модуляції, при цьому частоту проходження широтно-імпульсної послідовності змінюють в широких межах зовнішнім задавальним генератором, при цьому частота вихідної широтно-імпульсної послідовності завжди в точності дорівнює частоті проходження імпульсів зовнішнього задавального генератора, а скважність при цьому завжди постійна, причому величину скважності задають виключно цифровим кодом, який вводять в мікроконтролер.
Текст
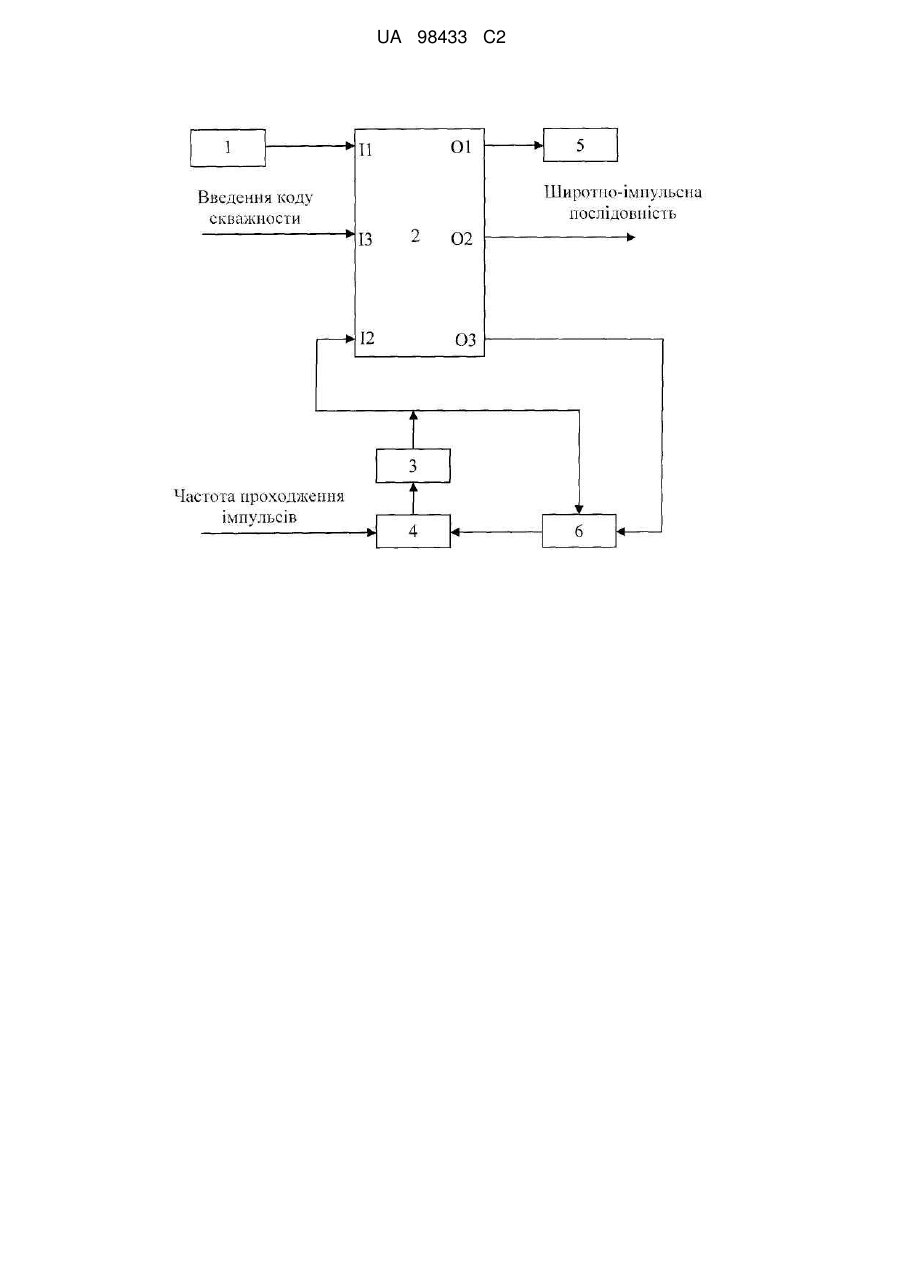
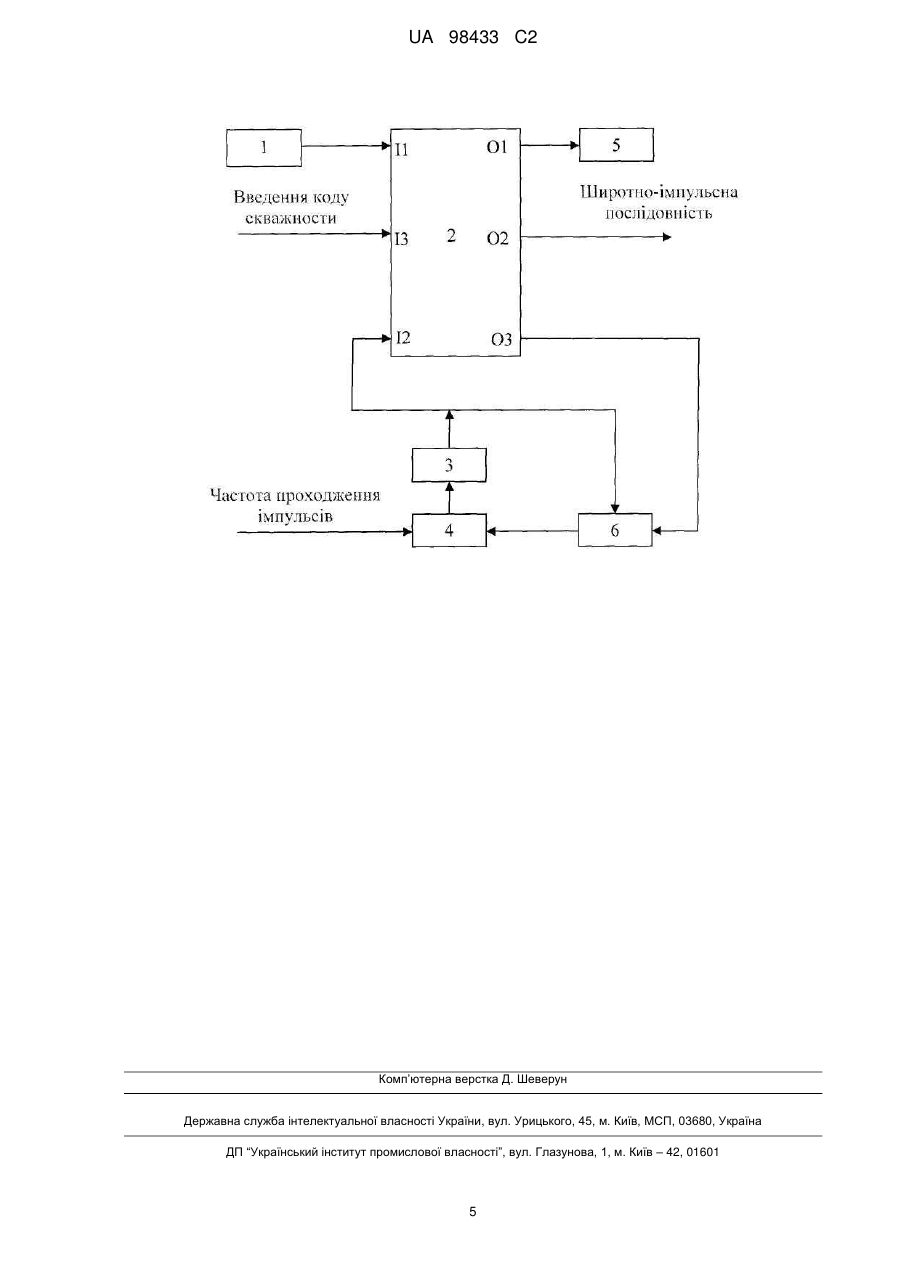
Реферат: Винахід належить до галузі цифрової техніки і може бути використаний для формування широтно-імпульсної послідовності із заданою скважністю з високою точністю, яка не залежить від зміни частоти інформаційного сигналу. В основу винаходу поставлена задача одержання широтно-імпульсної послідовності із заданою скважністю з високою точністю при зміні частоти інформаційного сигналу. Порівняння пропонованого винаходу з відомими способами і прототипом показує, що спосіб, що заявляється, проявляє нові технічні властивості, які полягають в одержанні широтно-імпульсної послідовності із заданою скважністю, причому значення скважності залишається незмінним при зміні частоти інформаційного сигналу. Такий спосіб дозволяє задавати скважність широтно-імпульсної послідовності з високою точністю. Використання індикатора дозволяє однозначно контролювати частоту і задане значення скважності широтно-імпульсної послідовності. Пристрій для формування широко-імпульсної послідовності із змінною частотою повторення і заданою скважністю складається з високостабільного опорного генератора, мікроконтролера, генератора, керованого напругою, фазового детектора, індикатора, подільника із змінним коефіцієнтом ділення. Мікроконтролер по заданому алгоритму програмного коду керує підключеними до нього пристроями. Перевага даного способу формування широко-імпульсної послідовності полягає в можливості одержання широтно-імпульсної послідовності із заданою скважністю при зміні частоти вхідного інформаційного сигналу. UA 98433 C2 (12) UA 98433 C2 UA 98433 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі цифрової техніки і може бути використаний для формування сигналів широтно-імпульсної модуляції (ШІМ) із заданою скважністю з високою точністю і не залежить від зміни частоти проходження імпульсів. Відомі способи формування широтно-імпульсної послідовності сигналів, описані, наприклад, в кн. Шкритек П. Справочное руководство по звуковой схемотехнике. Перевод с нем. - М.: МИР, 1991. - 446 с. За цим способом скважність вихідної широтно-імпульсної послідовності задається за допомогою генератора лінійно-змінюючої напруги (ГЛЗН) і аналогового компаратора, на один вхід якого подають опорну напругу, а на інший - сигнал ГЛЗН. Для зміни скважності вихідної широтно-імпульсної послідовності необхідно змінювати або швидкість наростання напруги ГЛЗН, змінюючи, наприклад, постійну часу RС-ланцюга, або змінювати величину опорної напруги. Частота проходження при цьому залишається постійною. При зміні частоти проходження імпульсів неможливо зробити адекватний перерахунок постійної часу RС-ланцюга або перерахунок опорної напруги для збереження незмінним співвідношення періоду проходження імпульсів до їх тривалості, що в ряді випадків виявляється неприйнятним. Найбільш близьким по технічній суті до пропонованого винаходу є спосіб формування широтно-імпульсної послідовності за допомогою мікроконтролера з вбудованим модулем ШИМ, який описаний, наприклад, в довідковому листку на мікроконтролери серії PIC16F87X (www.microchip.com). За цим способом мікроконтролером вимірюють частоту вхідного інформаційного сигналу і формують вихідну широтно-імпульсну послідовність, задаючи необхідну скважність. У мікроконтролері формування вихідної широтно-імпульсної послідовності зі змінною скважністю здійснюють, наприклад, шляхом введення деякого двійкового коду через будь-який стандартний цифровий паралельний або послідовний інтерфейс, або подачею напруги постійного струму на вхід включеного в мікроконтролер аналого-цифрового перетворювача. Однак такий спосіб формування широтно-імпульсної послідовності має істотний недолік, який полягає в тому, що при зміні частоти слідування імпульсів співвідношення періоду проходження імпульсів до їх тривалості може вимірюватися дискретно. Частота проходження імпульсів широтно-імпульсної послідовності також може при цьому змінюватися виключно дискретно, причому крок зміни частоти залежить від самої частоти проходження імпульсів. У результаті точність задання скважності широтно-імпульсної послідовності обмежується при цьому розрядністю регістрів мікроконтролера і скінченністю кроку зміни скважності вихідної широтно-імпульсної послідовності. Частота вихідної широтно-імпульсної послідовності при цьому не дорівнює частоті задавального генератора, а задається з деякою помилкою, що визначається частотою тактового генератора мікроконтролера, можливостями модуля широтноімпульсної модуляції і значенням самої частоти проходження імпульсів. В основу винаходу поставлена задача отримання широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти проходження імпульсів в широких межах. Поставлена задача вирішується тим, що спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах, що включає задання частоти проходження імпульсів широтноімпульсної послідовності зовнішнім задавальним генератором, використання вбудованого в мікроконтролер модуля широтно-імпульсної модуляції, вимірювання частоти проходження імпульсів, здійснюване за допомогою вбудованого в мікроконтролер модуля таймер-лічильника і здійснюване шляхом порівняння цієї частоти з частотою високостабільного опорного генератора, відрізняється від відомого тим, що мікроконтролер тактують генератором, керованим напругою, при цьому тактові імпульси високостабільного опорного генератора підраховують таймер-лічильником мікроконтролера, а частоту генератора, керованого напругою, додатково ділять за допомогою подільника із змінним коефіцієнтом ділення до частоти зовнішнього задавального генератора і синхронізують з цією частотою зовнішнього задавального генератора за допомогою кільця фазового автопідстроювання частоти, причому коефіцієнт ділення подільника із змінним коефіцієнтом ділення задають за допомогою мікроконтролера, подаючи відповідний код, що керує, з виходу керування мікроконтролера на вхід керування подільника із змінним коефіцієнтом ділення, при цьому величину коефіцієнта ділення визначають шляхом вимірювання частоти проходження імпульсів генератора, керованого напругою, здійснюване шляхом порівняння її з частотою високостабільного опорного генератора, при цьому змінюють коефіцієнт ділення подільника із змінним коефіцієнтом ділення кожного разу при наближенні частоти генератора, керованого напругою, до верхньої або нижньої межі його діапазону перебудови частоти, при цьому запобігаючий нестійкій роботі системи гістерезис вводять програмно, а скважність вихідної широтно-імпульсної послідовності 1 UA 98433 C2 5 10 15 20 25 30 35 40 45 50 55 задають за допомогою вбудованого в мікроконтролер модуля широтно-імпульсної модуляції шляхом введення в мікроконтролер двійкового коду будь-яким доступним способом, наприклад за допомогою будь-якого стандартного цифрового інтерфейсу або за допомогою вбудованого в мікроконтролер модуля аналогово-цифрового перетворювача, подаючи на його вхід деякий рівень постійної напруги, при цьому зовнішнім індикатором, підключеним до виходу мікроконтролера, відображають частоту проходження широтно-імпульсної послідовності і задане значення скважності, а вихідну широтно-імпульсну послідовність формують на виході мікроконтролера, який відповідає виходу вбудованого модуля широтно-імпульсної модуляції, при цьому частоту проходження широтно-імпульсної послідовності змінюють в широких межах зовнішнім задавальним генератором, при цьому частота вихідної широтно-імпульсної послідовності завжди в точності дорівнює частоті проходження імпульсів зовнішнього задавального генератора, а скважність при цьому завжди постійна, причому величину скважності задають виключно цифровим кодом, який вводять в мікроконтролер. Порівняння пропонованого винаходу з відомими способами і прототипом показало, що цей спосіб виявляє нові технічні властивості, які полягають в отриманні широтно-імпульсної послідовності заданої скважності і частоти, причому значення скважності залишається незмінним при зміні частоти проходження імпульсів в широких межах. Розрядність мікроконтролера і можливості модуля ШІМ при цьому не впливають на дискретність формування частоти вихідної послідовності імпульсів. Значення частоти вихідної широтноімпульсної послідовності визначається при цьому не можливостями вбудованого в мікроконтролер модуля ШІМ і тактовою частотою мікроконтролера, а виключно значенням частоти зовнішнього задавального генератора, причому значення вихідної частоти широтноімпульсної послідовності в точності дорівнює значенню частоти зовнішнього задавального генератора. Такий спосіб дозволяє отримати можливість задання скважності і частоти проходження широтно-імпульсної послідовності з більш високою точністю. Використання індикатора дозволяє однозначно контролювати частоту і задане значення скважності широтноімпульсної послідовності. Зазначений спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах можна реалізувати за допомогою пристрою, схема якого показана на малюнку. Пристрій для формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах містить: високостабільний опорний генератор 1, мікроконтролер 2, генератор керований напругою 3, фазовий детектор 4, індикатор 5, подільник з змінним коефіцієнтом ділення 6. При цьому вихід високостабільного опорного генератора 1 з'єднують з першим входом мікроконтролера 2, який відповідає входу вбудованого в мікроконтролер модуля таймер-лічильника, при цьому другий вхід мікроконтролера 2, який відповідає тактовому системному входу мікроконтролера, з'єднують з виходом генератора керованого напругою, при цьому на третій вхід мікроконтролера 2 подають сигнал, що визначає скважність вихідної широтно-імпульсної послідовності, при цьому вихід генератора керованого напругою 3 з'єднують також з сигнальним входом подільника зі змінним коефіцієнтом ділення 6, при цьому вихід подільника зі змінним коефіцієнтом ділення 6 з'єднують з першим входом фазового детектора 4, вихід якого з'єднують із входом генератора керованого напругою 3, при цьому на другий вхід фазового детектора 4 подають інформаційний сигнал від зовнішнього задавального генератора, при цьому перший вихід мікроконтролера 2 з'єднують з входом індикатора 5, при цьому на другому виході мікроконтролера 2 одержують широтно-імпульсну послідовність, при цьому третій вихід мікроконтролера 2 з'єднують з входом керування подільника зі змінним коефіцієнтом ділення 6. Працює пристрій наступним чином. Сигнал від зовнішнього задавального генератора, частота якого може змінюватися в широких межах, подають на перший вхід фазового детектора. На другий вхід фазового детектора подають сигнал з виходу подільника з змінним коефіцієнтом ділення. В результаті цього на виході фазового детектора формується певний рівень постійної напруги, що залежить від різниці частот і фаз сигналів, що надходять на його входи. Цю напругу постійного струму подають на вхід генератора керованого напругою. Генератор керований напругою під дією керуючого сигналу настроюють у відносно вузькому діапазоні частот. Коефіцієнт перекриття по частоті генератора, керованого напругою, повинен становити не менше 2 та може незначно перевищувати цю величину. Реалізований алгоритм роботи мікроконтролера допускає, що частота на виході генератора керованого напругою повинна змінюватися рівно в два рази. Деяке перевищення коефіцієнта перекриття по частоті 2 UA 98433 C2 5 10 15 20 25 30 35 40 45 50 55 60 зазначеної величини необхідно для усунення впливу дестабілізуючих факторів. Очевидно, що, наприклад, 10 % запас перекриття по частоті буде цілком достатнім. Сигнал з виходу генератора, керованого напругою, подають на тактовий системний вхід мікроконтролера. Оскільки частота на виході генератора, керованого напругою, змінюється не більше ніж в два рази, час виконання команд мікроконтролера також змінюється в межах цієї величини, що при відомих допущеннях не відбивається на роботі мікроконтролера з периферійними пристроями. Крім того, сам час використання реалізованого алгоритму роботи мікроконтролера залишається досить малим при тому, що частота проходження імпульсів зовнішнього задавального генератора може змінюватися в широких межах. Сигнал з виходу генератора, керованого напругою, одночасно подають і на сигнальний вхід подільника частоти із змінним коефіцієнтом ділення. Фазовий детектор спільно з генератором керованим напругою і подільником зі змінним коефіцієнтом розподілу утворюють кільце фазового автопідстроювання частоти. Коефіцієнт ділення цього подільника може змінюватися ступінчасто і може становити величини, що дорівнюють степеню числа 2. Мінімальне значення коефіцієнта розподілу визначається можливостями модуля ШІМ мікроконтролера з формуванням вихідної широтно-імпульсної послідовності необхідної частоти і скважності з необхідною роздільною здатністю при заданій тактовій частоті мікроконтролера. Максимальне значення коефіцієнта ділення також обмежено можливостями модуля ШІМ мікроконтролера з формуванням послідовності імпульсів мінімальної частоти при заданій тактовій частоті мікроконтролера. У будь-якому випадку діапазон частот формованої мікроконтролером широтно-імпульсної послідовності досить широкий і може складати декілька декад при зміні частоти тактового системного генератора в два рази. При цьому коефіцієнти ділення частоти внутрішнього подільника частоти модуля ШІМ мікроконтролера (з урахуванням можливого підключення попереднього подільника частоти тактового генератора) і зовнішнього подільника частоти із змінним коефіцієнтом ділення повинні бути цілком ідентичні. Таким чином, подільник із змінним коефіцієнтом ділення здійснює ділення частоти генератора, керованого напругою, до величини частоти вхідного задавального сигналу. При роботі системи фазового автопідстроювання частоти в режимі синхронізації ці дві частоти будуть рівні одна одній в точності. Крім того, частота проходження імпульсів вихідної широтно-імпульсної послідовності буде в точності дорівнювати частоті зовнішнього задавального генератора. Програмний код, закладений в пам'ять мікроконтролера по заданому алгоритму в залежності від наближення до верхньої або нижньої межі робочого діапазону частот генератора, керованого напругою, подає цифрову комбінацію на вхід керування подільника зі змінним коефіцієнтом ділення, змінюючи його коефіцієнт ділення вдвічі (збільшення вдвічі при наближенні частоти до верхньої межі діапазону або зменшення вдвічі при наближенні до нижньої межі діапазону). Процес перемикання відбувається повторно при кожному наступному наближенні до меж частотного діапазону генератора керованого напругою. Для вимірювання частоти сигналу генератора, керованого напругою, необхідно джерело опорного сигналу з високою стабільністю частоти. Сигнал цього високостабільного опорного генератора подають на вхід мікроконтролера, який відповідає входу модуля таймер-лічильника мікроконтролера. При цьому здійснюють вимірювання частоти генератора керованого напругою методом, єдина відмінність якого від відомого методу полягає в тому, що сигнал високостабільного опорного генератора подають не на тактовий системний вхід мікроконтролера і вимірюваний сигнал на вхід таймера-лічильника, а навпаки, сигнал високостабільного опорного генератора подають на вхід таймера-лічильника і вимірюваний сигнал подають на тактовий системний вхід мікроконтролера. У будь-якому з цих двох випадків інформація про частоту генератора керованого напругою буде адекватна. Якщо поточне значення частоти зовнішнього задавального генератора апріорі невідоме і при черговій зміні коефіцієнта ділення подільника зі змінним коефіцієнтом ділення вдвічі частота генератора керованого напругою не змінилася вдвічі в адекватний бік, то це означає, що система фазового автопідстроювання частоти ще не працює в режимі синхронізації і коефіцієнт ділення потрібно змінити вдвічі ще раз в той же бік. Цю процедуру необхідно повторювати до тих пір, поки система фазового автопідстроювання частоти не буде працювати в режимі синхронізації (при зміні вдвічі коефіцієнта ділення частота також змінюється вдвічі). Після того, як система фазового автопідстроювання частоти була введена в режим синхронізації і частота проходження вихідних імпульсів модуля широтно-імпульсної модуляції стала рівною в точності частоті проходження імпульсів зовнішнього задавального генератора, приступають до формування заданої скважності імпульсів. Для цього в мікроконтролер вводять необхідний цифровий код будь-яким відомим чином. У більшості випадків 256 градацій скважності виявляється більш ніж достатньо, тому в цьому випадку необхідно вводити 8 3 UA 98433 C2 5 10 15 20 25 30 35 40 45 значний двійковий код. Це можна зробити, використовуючи, наприклад, будь-який стандартний паралельний або послідовний цифровий інтерфейс мікроконтролера або вбудований модуль аналого-цифрового перетворювача, подаючи на його вхід деякий рівень постійної напруги. Введений цифровий код задає відповідну скважність вихідної послідовності імпульсів, яка не буде залежати від частоти проходження імпульсів. Індикатор, вхід якого з'єднаний з першим виходом мікроконтролера, дозволяє отримати наочність процесу, відображаючи частоту повторення імпульсів і задану скважність вихідної широтно-імпульсної послідовності. ФОРМУЛА ВИНАХОДУ Спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах, що включає задання частоти проходження імпульсів широтно-імпульсної послідовності зовнішнім задавальним генератором, використання вбудованого в мікроконтролер модуля широтно-імпульсної модуляції, вимірювання частоти проходження імпульсів, здійснюване за допомогою вбудованого в мікроконтролер модуля таймер-лічильника і здійснюване шляхом порівняння цієї частоти з частотою високостабільного опорного генератора, який відрізняється тим, що мікроконтролер тактують генератором, керованим напругою, при цьому тактові імпульси високостабільного опорного генератора підраховують таймер-лічильником мікроконтролера, а частоту генератора, керованого напругою, додатково ділять за допомогою подільника із змінним коефіцієнтом ділення до частоти зовнішнього задавального генератора і синхронізують з цією частотою зовнішнього задавального генератора за допомогою кільця фазового автопідстроювання частоти, причому коефіцієнт ділення подільника із змінним коефіцієнтом ділення задають за допомогою мікроконтролера, подаючи відповідний код, що керує, з виходу керування мікроконтролера на вхід керування подільника із змінним коефіцієнтом ділення, при цьому величину коефіцієнта ділення визначають шляхом вимірювання частоти проходження імпульсів генератора, керованого напругою, здійснюване шляхом порівняння її з частотою високостабільного опорного генератора, при цьому змінюють коефіцієнт ділення подільника із змінним коефіцієнтом ділення кожного разу при наближенні частоти генератора, керованого напругою, до верхньої або нижньої межі його діапазону перебудови частоти, при цьому запобігаючий нестійкій роботі системи гістерезис вводять програмно, а скважність вихідної широтно-імпульсної послідовності задають за допомогою вбудованого в мікроконтролер модуля широтно-імпульсної модуляції шляхом введення в мікроконтролер двійкового коду будь-яким доступним способом, наприклад за допомогою будь-якого стандартного цифрового інтерфейсу або за допомогою вбудованого в мікроконтролер модуля аналогово-цифрового перетворювача, подаючи на його вхід деякий рівень постійної напруги, при цьому зовнішнім індикатором, підключеним до виходу мікроконтролера, відображають частоту проходження широтноімпульсної послідовності і задане значення скважності, а вихідну широтно-імпульсну послідовність формують на виході мікроконтролера, який відповідає виходу вбудованого модуля широтно-імпульсної модуляції, при цьому частоту проходження широтно-імпульсної послідовності змінюють в широких межах зовнішнім задавальним генератором, при цьому частота вихідної широтно-імпульсної послідовності завжди в точності дорівнює частоті проходження імпульсів зовнішнього задавального генератора, а скважність при цьому завжди постійна, причому величину скважності задають виключно цифровим кодом, який вводять в мікроконтролер. 4 UA 98433 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for shaping pulse duration sequence with preset pulse ratio and frequency with high accuracy at pulse repetition frequency varying within wide range
Автори англійськоюShyrokov Ihor Borysovych, Durmanov Maksym Anatoliiovych, Skoryk Ivan Viktorovych
Назва патенту російськоюСпособ формирования широтно-импульсной последовательности с заданной скважностью частоты с высокой точностью при изменении частоты повторения импульсов в широких пределах
Автори російськоюШироков Игорь Борисович, Дурманов Максим Анатольевич, Скорик Иван Викторович
МПК / Мітки
МПК: H03K 7/00, H03K 3/017
Мітки: високою, широтно-імпульсної, формування, точністю, межах, повторення, зміни, заданої, широких, частоти, скважності, спосіб, послідовності, імпульсів
Код посилання
<a href="https://ua.patents.su/7-98433-sposib-formuvannya-shirotno-impulsno-poslidovnosti-zadano-skvazhnosti-i-chastoti-z-visokoyu-tochnistyu-pri-zmini-chastoti-povtorennya-impulsiv-v-shirokikh-mezhakh.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування широтно-імпульсної послідовності заданої скважності і частоти з високою точністю при зміні частоти повторення імпульсів в широких межах</a>
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (шім)
Номер патенту: 57418
Опубліковано: 25.02.2011
Автори: Фурман Ілля Олександрович, Алєнін Дмитро Олексійович, Бутов Олександр Сергійович, Пушкар Олександр Миколайович, Малиновський Михайло Леонідович, Семчук Роман Вячеславович
МПК: G05B 19/18
Мітки: використанням, шім, спосіб, модуляції, безпечного, формування, широтно-імпульсної, сигналу, гармонічного
Формула / Реферат:
1. Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (ШІМ), який полягає у тому, що двома каналами формуються незалежні імпульсні ВЧ послідовності із близькими частотами з подальшим застосуванням для них логічної операції "Виключне АБО", при цьому різниця частот ВЧ послідовностей задається рівною частоті результуючого гармонічного сигналу, який відрізняється тим, що для зменшення...
Формувач послідовності імпульсів перестроюваної скважності і тривалості

Номер патенту: 63377
Опубліковано: 10.10.2011
Автори: Рубанов Василь Григорович, Харченко Вячеслав Сергійович, Коробков Микола Григорович, Коробкова Олена Миколаївна
МПК: H03K 3/00
Мітки: перестроюваної, формувач, скважності, імпульсів, послідовності, тривалості
Формула / Реферат:
Формувач послідовності імпульсів перестроюваної скважності і тривалості, кратної періоду безперервної періодичної послідовності імпульсів, що подаються на її вхід з виходу кварцового генератора, який містить два реверсивні двійкові лічильники, кожен з яких має вхід подачі імпульсів синхронізації, вхід налагодження на режим підсумовування/віднімання, вхід дозволу синхронного паралельного завантаження і входи подачі даних при завантаженні,...
Формувач послідовності імпульсів фіксованої скважності з перенастроюваною тривалістю
Номер патенту: 63378
Опубліковано: 10.10.2011
Автори: Харченко Вячеслав Сергійович, Коробков Микола Григорович, Рубанов Василь Григорович, Коробкова Олена Миколаївна
МПК: H03K 3/00
Мітки: імпульсів, фіксовано, тривалістю, формувач, послідовності, перенастроюваною, скважності
Формула / Реферат:
Формувач послідовності імпульсів фіксованої скважності з перенастроюваною тривалістю, який містить два реверсивні двійкові лічильники, налагоджених на режим віднімання, кожен з яких має вхід подачі імпульсів синхронізації, вхід налагодження на режим підсумовування/віднімання, вхід дозволу синхронного паралельного завантаження і входи подачі даних при завантаженні, вхід дозволу режиму рахування, вхід асинхронної установки в нульовий стан,...
Спосіб формування трапецеїдальної широтно-імпульсної модуляції напруги інвертора

Номер патенту: 67170
Опубліковано: 10.02.2012
Автори: Шокарьов Дмитро Анатолійович, Скапа Євген Іванович
МПК: H02M 7/00
Мітки: широтно-імпульсної, спосіб, модуляції, формування, інвертора, трапецеїдальної, напруги
Формула / Реферат:
Спосіб формування вихідної напруги інвертора частотою, що використовує широтно-імпульсну модуляцію частотою живильної постійної напруги , що перетворюється в змінне, огинаюча імпульсів якого трапецеїдальної форми амплітудою , який...
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (шім)
Номер патенту: 39228
Опубліковано: 10.02.2009
Автори: Тертишний Сергій Миколайович, Фурман Ілля Олександрович, Аллашев Олександр Юрійович, Бутов Олександр Сергійович, Борисенко Володимир Анатолійович, Бовчалюк Станіслав Ярославович, Малиновський Михайло Леонідович, Кощій Леонід Дмитрович
МПК: G05B 19/18
Мітки: спосіб, безпечного, модуляції, використанням, широтно-імпульсної, сигналу, гармонічного, формування, шім
Формула / Реферат:
Спосіб безпечного формування гармонічного сигналу з використанням широтно-імпульсної модуляції (ШІМ), в якому виконують фільтрацію ВЧ-сигналу зі змінною скважністю за допомогою фільтра високих частот, який відрізняється тим, що двома каналами формують незалежні імпульсні високочастотні (ВЧ) послідовності із близькими частотами та подальшим застосуванням логічної операції "Виключне АБО", при цьому різниця частот ВЧ- послідовностей...
Попередній патент: Спосіб добування метану з гідрату метану
Наступний патент: Спосіб отримання синтетичного газу із спікливого вугілля та/або вуглецевміщуючої шихти
Випадковий патент: Суцільнолита коронка при протезуванні на природних зубах або імплантатах