Спосіб визначення прогнозованого положення космічних об’єктів
Номер патенту: 102045
Опубліковано: 27.05.2013
Автори: Ракушев Михайло Юрійович, Ковбасюк Сергій Валентинович, Каневський Леонід Броніславович
Формула / Реферат
Спосіб визначення прогнозованого положення космічних об’єктів, згідно з яким виконують просторово-часовий прийом локаційного сигналу та визначають вектор початкових умов і вектор випадкових параметрів космічних об'єктів, здійснюють розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок, який відрізняється тим, що перед оцінюванням прогнозованих параметрів виконують лінеаризацію шуканих вихідних параметрів відносно відповідних вхідних параметрів, далі розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок та математичного сподівання проводять в області зображень математичного апарата диференціальних перетворень, після чого на основі моделі збуреного руху космічних об'єктів отримують диференціальний спектр вихідних параметрів в області зображень, далі розрахунок можливих положень космічних об'єктів здійснюють з урахуванням другої похідної від вихідних параметрів за вхідними параметрами, а отриманий результат з області зображень переводять в область оригіналів.
Текст
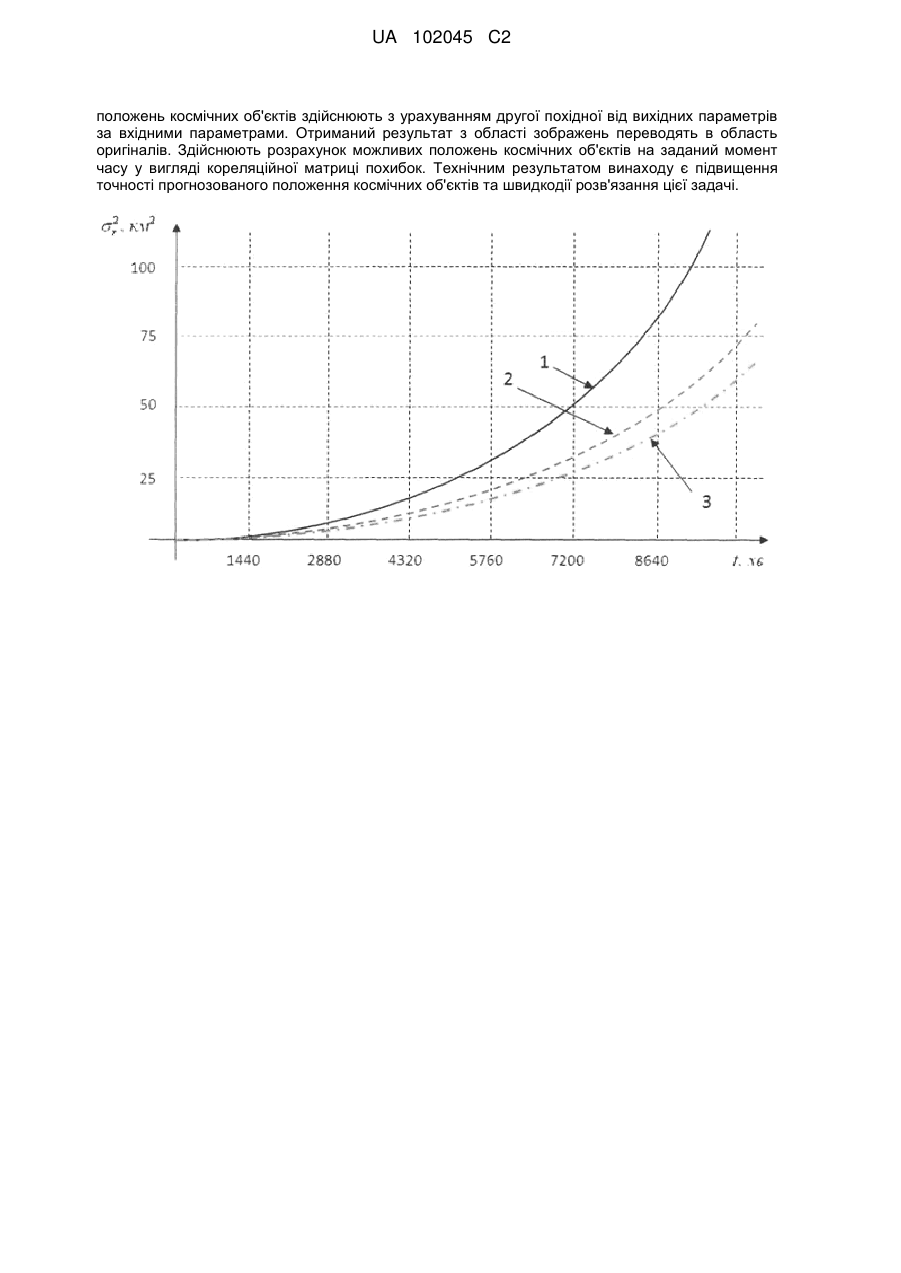
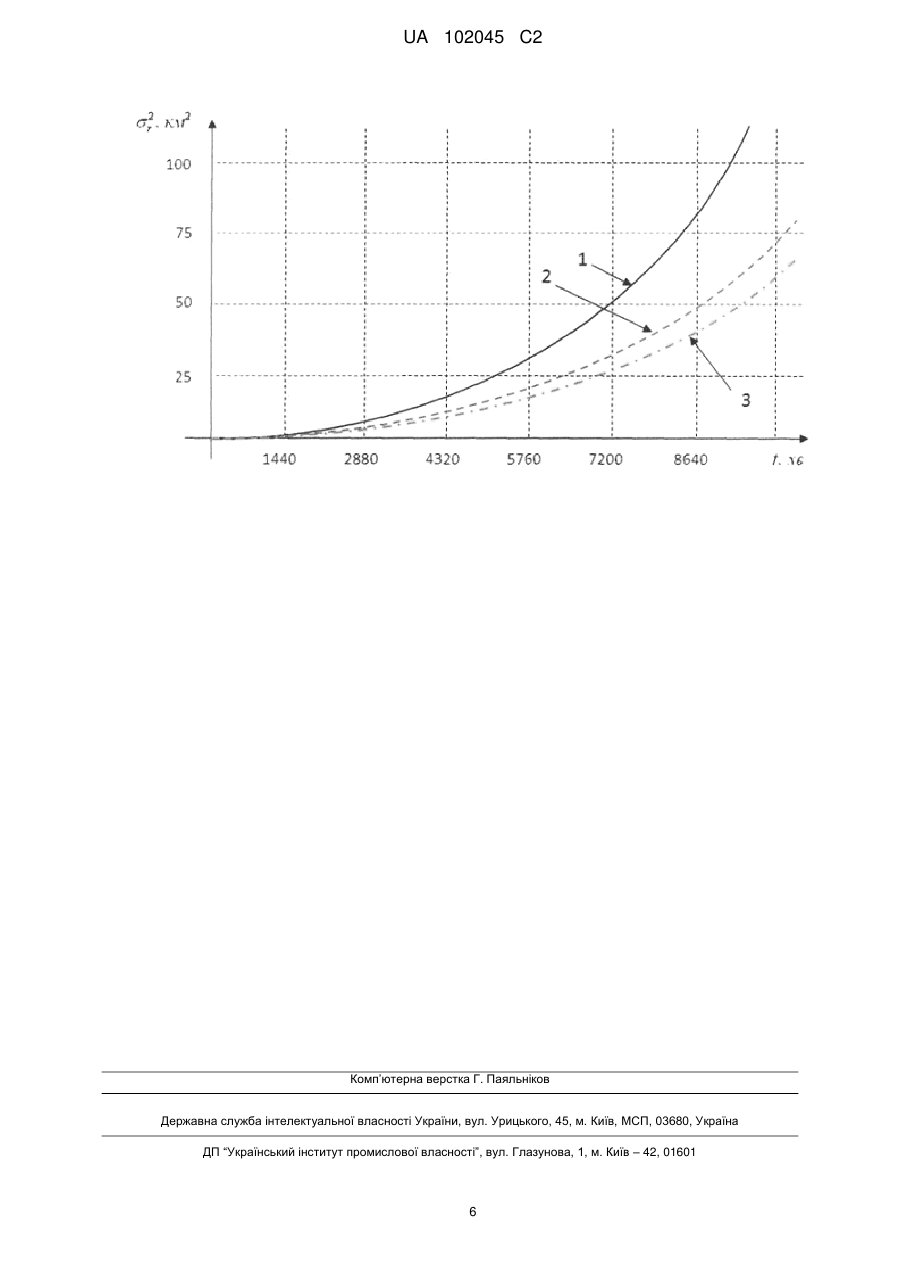
Реферат: Винахід стосується космічної галузі і може застосовуватися для балістико-навігаційного забезпечення (прогнозу) руху космічних об'єктів, попередження загрози зіткнення в навколоземному просторі космічних об'єктів при використанні різних локаційних засобів контролю космічного простору. Спосіб визначення прогнозованого положення космічних об'єктів полягає у просторово-часовому прийомі локаційного сигналу та визначенні вектора початкових умов і вектора випадкових параметрів космічних об'єктів. Після цього проводять лінеаризацію шуканих вихідних параметрів відносно відповідних вхідних. Розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок та математичного сподівання проводять в області зображень математичного апарата диференціальних перетворень. На основі моделі збуреного руху космічних об'єктів отримують диференціальний спектр вихідних параметрів в області зображень. Розрахунок можливих UA 102045 C2 (12) UA 102045 C2 положень космічних об'єктів здійснюють з урахуванням другої похідної від вихідних параметрів за вхідними параметрами. Отриманий результат з області зображень переводять в область оригіналів. Здійснюють розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок. Технічним результатом винаходу є підвищення точності прогнозованого положення космічних об'єктів та швидкодії розв'язання цієї задачі. UA 102045 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до космічної галузі й може застосовуватися для балістико-навігаційного забезпечення (прогнозу) руху космічних об'єктів (КО), попередження загрози зіткнення в навколоземному просторі КО при використанні різних локаційних засобів контролю космічного простору. Відомий спосіб прогнозу руху КО [1, с. 232]. Як і в запропонованому способі, у відомому способі здійснюють розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок. Але на відміну від способу-винаходу, у відомому способі кореляційну матрицю похибок прогнозу визначають без урахування перетворень вихідної кореляційної матриці похибок визначення координат КО у проміжні системи координат і числового розв'язку рівняння Кеплера. Це призводить до збільшення розмірів просторового строба можливого знаходження КО на момент прогнозу і, як наслідок, дає значну похибку в оцінці точності положення КО на момент прогнозу. Крім того, внаслідок використання класичних методів обрахунку відомий спосіб має низьку швидкодію. Таким чином, суттєвими недоліками відомого способу є низька точність та швидкодія прогнозованого положення КО. Найбільш близьким способом, обраним за прототип, є спосіб визначення прогнозованого положення балістичних об'єктів [2]. У способі-прототипі, як і в заявленому способі, виконують просторово-часовий прийом локаційного сигналу та визначають вектор початкових умов і вектор випадкових параметрів КО, здійснюють розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок. Але на відміну від заявленого способу, у способі-прототипі для розрахунку кореляційної матриці похибок прогнозу проводять перетворення вихідної кореляційної матриці похибок визначення координат КО у проміжні системи координат і числового розв'язку рівняння Кеплера [2], але традиційними числовими методами. Крім того, в основу цього способу покладена модель незбуреного руху КО. Усе це призводить до низької точності оцінювання як параметрів руху КО, так і області похибок прогнозу на великих інтервалах часу прогнозу, а використання традиційних числових методів обрахунку призводить до високої обчислювальної складності, а значить до низької швидкодії. Таким чином, суттєвими недоліками способу-прототипу є низька точність та швидкодія прогнозованого положення КО. В основу винаходу поставлено задачу вдосконалення способу визначення прогнозованого положення балістичних об'єктів, щоб забезпечити підвищення точності прогнозованого положення КО та швидкодії. Поставлена задача розв'язується тим, що в способі визначення прогнозованого положення КО, згідно з яким виконують просторово-часовий прийом локаційного сигналу та визначають вектор початкових умов і вектор випадкових параметрів КО, здійснюють розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок, згідно з винаходом перед оцінюванням прогнозованих параметрів виконують лінеаризацію шуканих вихідних параметрів відносно відповідних вхідних параметрів, далі розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок та математичного сподівання проводять в області зображень математичного апарата диференціальних перетворень, після чого на основі моделі збуреного руху КО отримують диференціальний спектр вихідних параметрів в області зображень, далі розрахунок можливих положень КО здійснюють з урахуванням другої похідної від вихідних параметрів за вхідними параметрами, а отриманий результат з області зображень переводять в область оригіналів. Результатом прогнозу є випадкові значення поточних параметрів руху КО, тоді точність прогнозу буде оцінюватися областю можливого його положення. Розв'язання цієї задачі в більшості випадків вдається звести до розрахунку ймовірнісних характеристик вихідних параметрів таких об'єктів за заданим стохастичним диференціальним рівнянням та ймовірнісними характеристиками його вхідних випадкових параметрів: Y F( t, Y, X) y q f q ( t, Y, X) при t [ t 0 , t 1 ] , Y0 Y( t 0 ) , (1) де Y0 Y( t 0 ) - вектор розміром m ; тобто q 1 m , , 55 mN , N - натуральні числа; t - проміжок часу від початкового моменту t 0 0 до визначеного - t 1 ; F, f q - функції відповідних залежностей; Y0 - вектор початкових умов в початковий момент часу; 1 UA 102045 C2 X ( x i ) - вектор випадкових параметрів розміром n N; 5 10 15 20 а ймовірнісні характеристики для випадкового вектора X задані щільністю розподілу ймовірності x ( X) . Перерахунок похибок в початкових умовах, що визначаються кореляційною матрицею, на визначений момент часу, динаміка зміни з часом яких (похибок) проводитимо за відомою моделлю збуреного руху КО [1], F 2 r (t) r (t) , 0 3 t 2 r ( t ) mKO де r ( t ) - радіус-вектор КО, F - додаткові сили, що діють на КО в польоті, окрім 3 2 центральної сили земного тяжіння, 0 =3,986·105 км /с - гравітаційний параметр Землі, m KO маса КО, - диференціювання. При розрахунках використаємо математичний апарат диференціальних перетворень (ДП) [3, 4], що при розв'язанні стохастичних рівнянь дозволяє отримати в області зображень їх точні моделі в межах кореляційної теорії. Оскільки рух КО являє собою математичну модель нелінійної системи, що описується диференціальними рівняннями (1) відносно вихідних координат, то задача аналізу точності нелінійних систем може бути зведена до визначення необхідних імовірнісних характеристик деяких функціоналів від вхідних координат системи, що досліджується при заданих імовірнісних характеристиках випадкових відхилень і випадкових величин. При подальшому розгляді для спрощення математичних викладок визначення ймовірнісних характеристик зведемо до обрахунку математичного очікування та кореляційної матриці: M Y M t, Y t M l M l t, Y t , при l 1 L , (2) ,..., 25 K Y K Y Y K ls K l ( t, Y( t )) s ( t, Y( t )) , при l, s 1 ,..., (3) де Y - деякий функціонал, що має вигляд Y ( t, Y( t )) l l ( t, Y( t )) ; L - кінцеве значення заданого відрізка; T - знак транспонування; T 30 35 - знак над величиною показує її центрованість. Застосування ДП [3, 4] дозволяє при спрощенні процедури проведення математичного моделювання фізичних процесів (об'єктів) отримувати для них в області зображень точні диференціальні моделі, де можливе застосування різноманітних аналогів відомих аналітичних i чисельно-аналітичних методів аналізу й синтезу випадкових процесів і нелінійних стохастичних систем. Аналітичні перетворення математичних моделей випадкових процесів значно скорочують об'єм обчислень, а потенційна можливість диференціальних перетворень дає змогу отримати точне рішення (відновлення) завдань в області оригіналів. Використання методу оцінювання ймовірнісних характеристик за виразом (4) дає змогу остаточно розв'язати задачу в рамках лінійної теорії, де кореляційна матриця похибок результату буде виражена через кореляційну матрицю похибок вхідних даних, відповідно, вектор похибок вихідних даних являтиме собою випадкову величину, розподілену за нормальним законом: m X ( t, Y( t, X)) ( X) m X X m X X T m X X X n m l ( X) l m X X l (m X ) l X x i x i i1 T 40 де X , (4) x i x i m xi - центрований випадковий параметр відносно математичного очікування m xi . 2 UA 102045 C2 5 Підвищення точнісних характеристик здійснюємо за допомогою додаткового врахування нелінійних членів - других похідних від вихідних параметрів за вхідними. У результаті при розгляді функції в області зображень врахуємо ще один квадратичний член ряду Тейлора, при цьому в задачі розрахунку імовірнісних характеристик рівняння (1) незалежних змінних n+1 (час та складові вектора X ) при її розв'язку застосуємо багатомірні ДП, де пряме та обернене перетворення для детермінованих функцій відповідно мають вигляд [3]: y q (k, X) Hk dk y q ( t, X) q , (5) k! dt k t t* k t y q (k, X) y q (k, X) , (6) k 0 Hq де y q (k, X) - дискретна функція цілочислового аргументу k 0,1 2, 3,... і заданої , випадкової величини X ; d - оператор диференціювання в області зображень; Hq - довжина відрізка часового аргументу, на якому розглядається функція y q ( t, X) ; 10 значення 15 Hq повинно бути менше, ніж радіус збіжності рядів Тейлора в околі точки t t * . З урахуванням нелінійних членів отримаємо підвищення точності за величинами математичного сподівання та кореляційної матриці відповідно на такі величини: Ml ( X ) K l s 1 2 n 1 2 1 2 n n n 2 l x x i i1 j1 n n n i 1 j 1 r 1 n i 1 j 1 r 1 K ij j , (7) 1 2s 3 ijr x i x jx r s 2l 1 3 ijr x i x jx r 4 n n n n i 1 j 1 r 1 p 1 3 ijr , 4 ijrp 20 25 30 35 21 2s 4 ijrp K ijK rp , x ix j x r x p , (8) де - третій та четвертий центральні моменти випадкових параметрів. Отже, використання математичного апарата ДП дає змогу підвищити швидкодію процедури екстраполяції даних руху КО за рахунок зменшення обчислювальних операцій, що обумовлено способом розрахунку диференціальних спектрів. А підвищення точності визначення прогнозованого просторово-часового положення КО досягається за рахунок самої схеми ДП, оскільки вона, на відміну від числових схем, не містить методичних похибок, а також завдяки врахуванню ще одної складової - квадратичного члена ряду Тейлора. Таким чином, запропонований спосіб визначення прогнозованого положення КО забезпечує підвищення точності та швидкодії прогнозованого положення КО. Заявлений спосіб визначення прогнозованого положення космічних об'єктів виконують у такій послідовності. 1. Виконують просторово-часовий прийом локаційного сигналу за допомогою будь-яких існуючих засобів контролю космічного простору та визначають вектор початкових умов і вектор випадкових параметрів КО. 2. Перед оцінюванням прогнозованих параметрів для отримання розрахункової схеми прогнозування руху КО на часовому інтервалі прогнозу iз застосуванням методу багатомірних ДП виконують лінеаризацію шуканих вихідних параметрів відносно відповідних вхідних параметрів за виразом (4). 3. Розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок та математичного сподівання проводять в області зображень математичного апарата ДП: 3 UA 102045 C2 T T Mлін[( X)] M(m X ) X M[m X ] M X X X T M X m X X m X Mлін[( X)] m X , , (9) T T T K M ( X)( X) M ( X) M X X X X T T T , (10) M X X M X XT KX X X X X X лін Y лін T лін 2 КХ X X лін лін де M , K - лінеаризовані математичне очікування та кореляційна матриця. T 3і Kѐ Y 5 4. На основі моделі збуреного руху КО отримують диференціальний спектр вихідних параметрів Y(k, X) в області зображень розв'язку рівняння (1). При цьому застосовують математичний апарат ДП (5) до рівняння (1) в області зображень й отримують математичну модель у формі рекурентного виразу Hq f t(k ), Y(k, X), X, k 1 q y q (0) y q0 , q 1 m, ,..., yi (k 1 X) , 10 , (11) де послідовно змінюючи значення аргументу k 0,12, згідно з виразом (11) розв'язують , задачу, яка містить у собі моделювання диференціального рівняння (1) в області зображень. 5. Розрахунок можливих положень КО здійснюють з урахуванням другої похідної від вихідних параметрів за вхідними параметрами, тобто враховують квадратичний член ряду Тейлора: ( t, Y( t, X)) ( X) m X X m X T 1 2 X XT X X 2 X 2 l ( X ) l m X X n l (m X ) 15 20 i 1 l m X 1 xi x i 2 n n i 1 j 1 2 l xi x j . x ix j . (12) Тим самим для виразів (9) та (10) отримаємо відповідні поправки у вигляді (7) та (8). 6. Отриманий результат з області зображень переводять в область оригіналів за виразом (6), визначаючи необхідні ймовірнісні характеристики за диференціальним спектром Y(k, X) математичної моделі, що здійснюють з урахуванням заданих параметрів умов (1) імовірнісних характеристик випадкових величин X ( X) : M ( t(k ), Y(k, X)) . . 7. Здійснюють розрахунок можливих положень КО на заданий момент часу у вигляді кореляційної матриці похибок. Експериментальне підтвердження 4 UA 102045 C2 1. З метою перевірки було проведено моделювання руху КО запропонованим способом (Із застосуванням ДП) і способом-прототипом (за традиційним числовим методом розрахунку), за умови однакової точності та різних значень ексцентриситету e . При цьому була визначена результуюча обчислювальна складність N ад - кількість арифметичних дій, що проводилась на 5 одному кроці t відстані часової сітки з урахуванням того, що максимальний модуль вектора методичної похибки визначення радіуса вектора КО на часовому інтервалі прогнозу не перевищував одного метра. Отримані результати наведені в таблиці. Таблиця 0,001 e 0,01 e 0,001 Метод прогнозу N ад Метод Адамса 738 7-го порядку Метод ДП 287 10 15 20 25 30 ефект за t (с) швидк. (рази) t (с) 12-15 ефект за швидк. (рази) 10-12 3.1-4.1 120 100-120 3.1-3.9 0,01 e 0,1 ефект за t (с) швидк. (рази) 10 3,1-3,5 80-90 2. Враховуючи тактико-технічні характеристики та особливості роботи наявних в Україні наземних засобів спостереження, було проведено імітаційне моделювання, де було здійснено тижневий прогноз руху низькоорбітального космічного апарата типу "Січ-2". Отримані результати, з урахуванням першої та другої похідної, у вигляді зміни середньоквадратичного відхилення наведено на кресленні. Лінії 1 відповідають оцінки середньоквадратичного відхилення похибки, отриманої за відомим способом, лінії 2 - за способом-прототипом, а лінії 3 запропонованим способом. Аналіз наведених залежностей показує, що оцінка похибок прогнозу параметрів руху космічного апарата запропонованим способом дозволяє найточніше визначати елементи кореляційної матриці похибок прогнозу, про що свідчить збіг динаміки зміни значень похибок з радіусом-вектором космічного апарата запропонованим способом. Таким чином, проведені вдосконалення дозволили вирішити поставлену задачу підвищення точності та швидкодії прогнозу положення КО. Джерела інформації: 1. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации/ С.З. Кузьмин. - М.: Сов. Радио, 1974-432 с. 2. Патент України № 72409 А, МПК G01S 13/00 Спосіб визначення прогнозованого положення балістичних об'єктів / С.В. Ковбасюк, О.О. Писарчук, О.М. Хімчик. - Опубл. 15.02.05, Бюл. № 2. 3. Пухов Г.Е. Дифференциальные спектры и модели/ Г.Е. Пухов. - К.: Наукова думка, 1990.184 с. 4. Пухов Г.Е. Дифференциальные преобразования и математическое моделирование физических процессов / Г.Е. Пухов. - К.: Наукова думка, 1986.-159 с. ФОРМУЛА ВИНАХОДУ 35 40 45 Спосіб визначення прогнозованого положення космічних об’єктів, згідно з яким виконують просторово-часовий прийом локаційного сигналу та визначають вектор початкових умов і вектор випадкових параметрів космічних об'єктів, здійснюють розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок, який відрізняється тим, що перед оцінюванням прогнозованих параметрів виконують лінеаризацію шуканих вихідних параметрів відносно відповідних вхідних параметрів, далі розрахунок можливих положень космічних об'єктів на заданий момент часу у вигляді кореляційної матриці похибок та математичного сподівання проводять в області зображень математичного апарата диференціальних перетворень, після чого на основі моделі збуреного руху космічних об'єктів отримують диференціальний спектр вихідних параметрів в області зображень, далі розрахунок можливих положень космічних об'єктів здійснюють з урахуванням другої похідної від вихідних параметрів за вхідними параметрами, а отриманий результат з області зображень переводять в область оригіналів. 5 UA 102045 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of predicted position of space objects
Автори англійськоюKovbasiuk Serhii Valentynovych, Rakushev Mykhailo Yuriiovych, Kanevskyi Leonid Bronislavovych
Назва патенту російськоюСпособ определения прогнозируемого положения космических объектов
Автори російськоюКовбасюк Сергей Валентинович, Ракушев Михаил Юрьевич, Каневский Леонид Брониславович
МПК / Мітки
МПК: G01S 11/00, G01S 13/66, B64G 3/00
Мітки: об'єктів, прогнозованого, положення, космічних, спосіб, визначення
Код посилання
<a href="https://ua.patents.su/8-102045-sposib-viznachennya-prognozovanogo-polozhennya-kosmichnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення прогнозованого положення космічних об’єктів</a>
Спосіб визначення прогнозованого положення балістичних об’єктів
Номер патенту: 72409
Опубліковано: 15.02.2005
Автори: Писарчук Олексій Олександрович, Хімчик Олексій Миколайович, Ковбасюк Сергій Валентинович
МПК: G06F 7/00, G01S 13/00
Мітки: положення, балістичних, об'єктів, спосіб, визначення, прогнозованого
Формула / Реферат:
Спосіб визначення прогнозованого положення балістичних об'єктів, що полягає в розрахунку, відносно радіолокаційної станції, прогнозованих координат балістичного об'єкта на заданий момент часу за результатами оцінки поточного положення об'єкта, а також просторової області похибок прогнозу, що визначається елементами кореляційної матриці похибок екстраполяції, який відрізняється тим, що розрахунок кореляційної матриці похибок екстраполяції...
Спосіб визначення параметрів руху космічних об’єктів наземними оптичними засобами
Номер патенту: 79216
Опубліковано: 10.04.2013
Автори: Ковбасюк Сергій Валентинович, Каневський Леонід Броніславович
МПК: G01S 11/00
Мітки: наземними, руху, засобами, космічних, об'єктів, визначення, параметрів, спосіб, оптичними
Формула / Реферат:
Спосіб визначення параметрів руху космічних об'єктів наземними оптичними засобами, згідно з яким виконують просторово-часовий прийом локаційного сигналу, який на часовому інтервалі вимірювань представляють у вигляді масиву кутових даних, потім з вимірювальної системи координат дані переводять у систему шуканих параметрів, що є областю оригіналів, визначають часткові похідні від параметрів руху космічного об'єкта за наближеними умовами, після...
Спосіб визначення геометричних розмірів космічних об’єктів

Номер патенту: 18972
Опубліковано: 15.11.2006
Автори: Моргун Олександр Андрійович, Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: H04B 7/00
Мітки: геометричних, спосіб, визначення, об'єктів, розмірів, космічних
Формула / Реферат:
Спосіб визначення геометричних розмірів космічних об'єктів, який полягає у тому, що при опромінюванні космічних об'єктів радіолокаційними системами з довжиною хвилі, більшою за розміри об'єкту, спостерігається ефект релеєвського розсіювання, при якому ефективна відбиваюча поверхня об'єкту стає значно більшою від площини поперечного зрізу та залежить від розмірів об'єкту та довжини хвилі, що при використанні випромінювання на різних довжинах...
Система для визначення положення мобільного радіотрансивера (варіанти) та спосіб визначення положення мобільного радіотрансивера
Номер патенту: 64780
Опубліковано: 15.03.2004
Автори: Гілгаузен Клайн С., Соліман Самір С.
МПК: G01S 5/02, G01S 1/00, G01S 5/00
Мітки: система, радіотрансивера, мобільного, положення, варіанти, спосіб, визначення
Формула / Реферат:
1. Система для визначення положення мобільного радіотрансивера, яка має: базову станцію , яка відрізняється тим, що вміщує засоби обчислення доплерівського зсуву відносно базової станції сигналів, які передають перший, другий і третій супутники, засоби обчислення першого набору псевдовідстаней 2, 3 відповідно першого і другого супутників відносно базової станції, засоби передачі інформації, яка ідентифікує супутник, інформації про...
Спосіб визначення прогнозованого залишкового ресурсу металоконструкцій
Номер патенту: 71333
Опубліковано: 10.07.2012
Автори: Ардашев В'ячеслав Миколайович, Рейдерман Юрій Ізраілевич, Яковлєв Герман Михайлович, Дзяк Георгій Вікторович, Носов Денис Геннадійович, Чибісов Віктор Іванович, Сухомлин Володимир Іванович
МПК: G01N 3/00
Мітки: спосіб, залишкового, металоконструкцій, прогнозованого, ресурсу, визначення
Формула / Реферат:
Спосіб визначення прогнозованого залишкового ресурсу металоконструкцій, що включає додаткове виконання імітаційної моделі, по якій прогнозують залишковий ресурс елементів конструкції з урахуванням характеристик по довготривалій міцності, пластичності та повзучості металу елементів діючої конструкції і відповідних коефіцієнтів запасу, який відрізняється тим, що визначення ресурсу металоконструкції виконують шляхом порівняння градієнта (на...
Попередній патент: Спосіб, електронна система гарантійного обліку та спосіб обробки інформації, пов’язаної з гарантійним обліком
Наступний патент: Важкогорюча полімерна композиція
Випадковий патент: Спосіб сушіння харчових продуктів в функціональних місткостях тепломасообмінного модуля