Електромеханічний привід
Номер патенту: 104641
Опубліковано: 25.02.2014
Автори: Алєксашін Анатолій Алєксєєвіч, Нєстєров Віктор Антоновіч, Урсу Валєнтін Євгєньєвіч
Формула / Реферат
1. Електромеханічний привід, що складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевими частинами, електродвигуна, що має статор та закріплений на валу ротор; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними у ньому у кілька рядів тілами кочення, що переміщуються встановленими на ексцентрично розташованих поверхнях робочими дисками відносно хвилеутворювача у жорсткому колесі першого ступеня, яке має на зовнішній частині ексцентрично розташовані поверхні для другого ступеня; сепаратор другого ступеня з розміщеними в ньому у кілька рядів тілами кочення, що переміщуються кільцями, встановленими на ексцентрично розташованих на жорсткому колесі поверхнях, відносно другого хвилеутворювача на внутрішній поверхні циліндричної частини корпуса; вихідного вала, що спирається на тіла кочення та підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів та обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм та електродвигуном датчика положення ротора електродвигуна, з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом, який відрізняється тим, що корпус є нерухомою частиною електромеханічного приводу, електродвигун розташований всередині жорсткого колеса двоступеневої хвильової передачі, ексцентриковий вузол першого ступеня розташований поза ротором електродвигуна, вихідний вал приєднаний до сепаратора другого ступеня.
2. Електромеханічний привід за п. 1, який відрізняється тим, що співвідношення довжини статора та його внутрішнього діаметра знаходиться в інтервалі 1-2.
3. Електромеханічний привід за п. 1, який відрізняється тим, що кількість ексцентрично розташованих поверхонь є парною, при цьому осі суміжних ексцентрично розташованих поверхонь суміщені у протилежні напрямки від центральної осі.
4. Електромеханічний привід за п. 1, який відрізняється тим, що передатне відношення двоступеневої хвильової передачі знаходиться в інтервалі 500-2500 при частоті обертання ротора електродвигуна 5000-25000 хв-1.
Текст
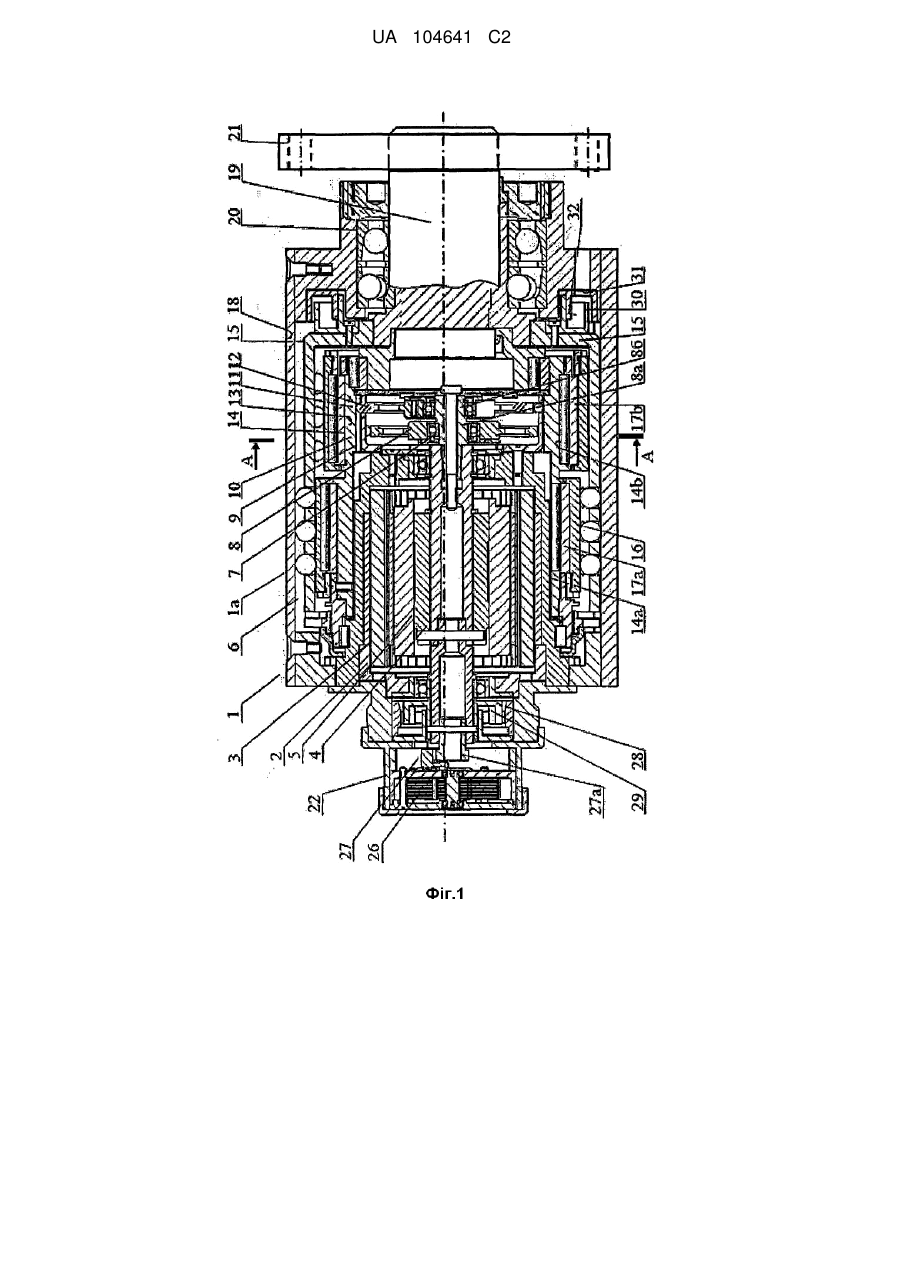
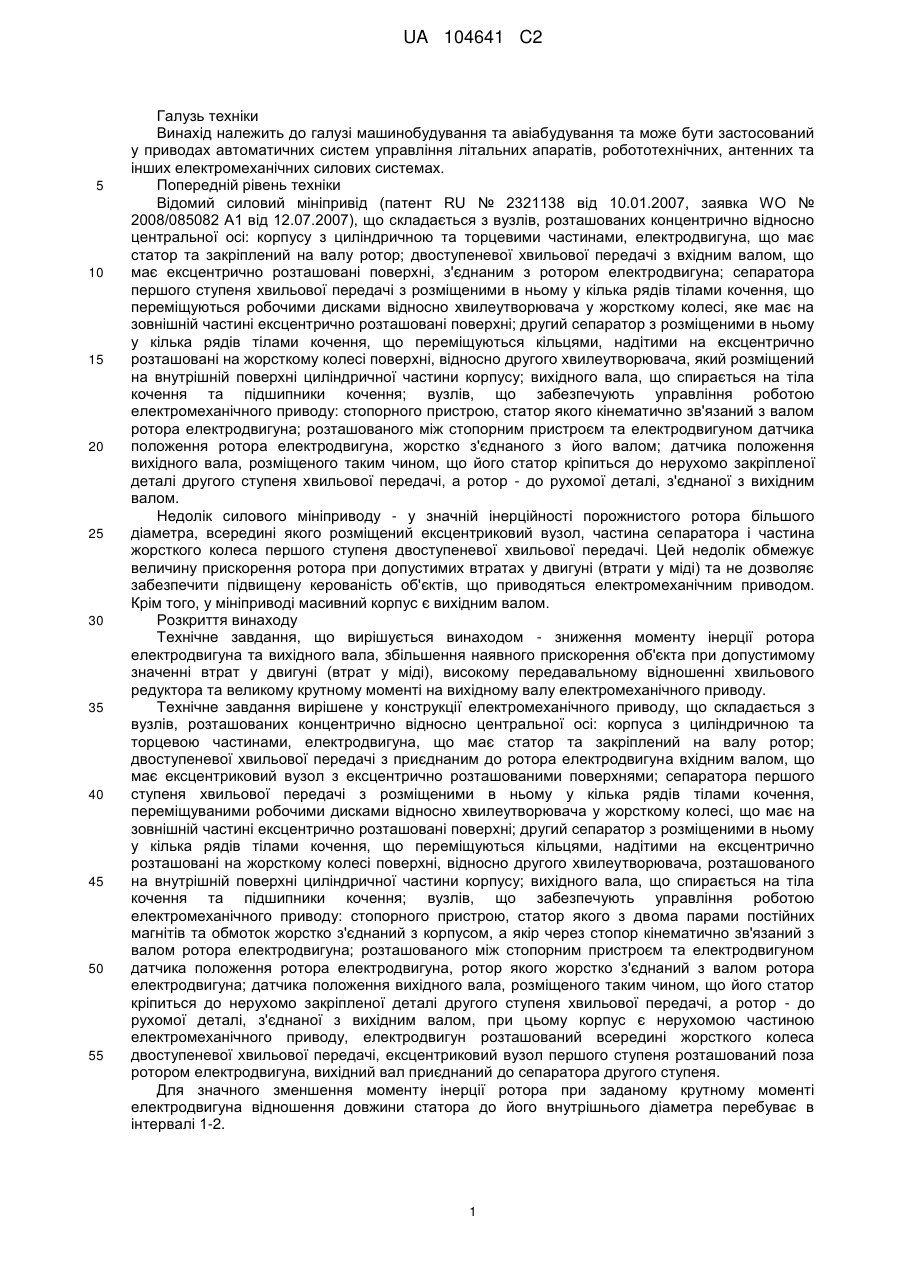
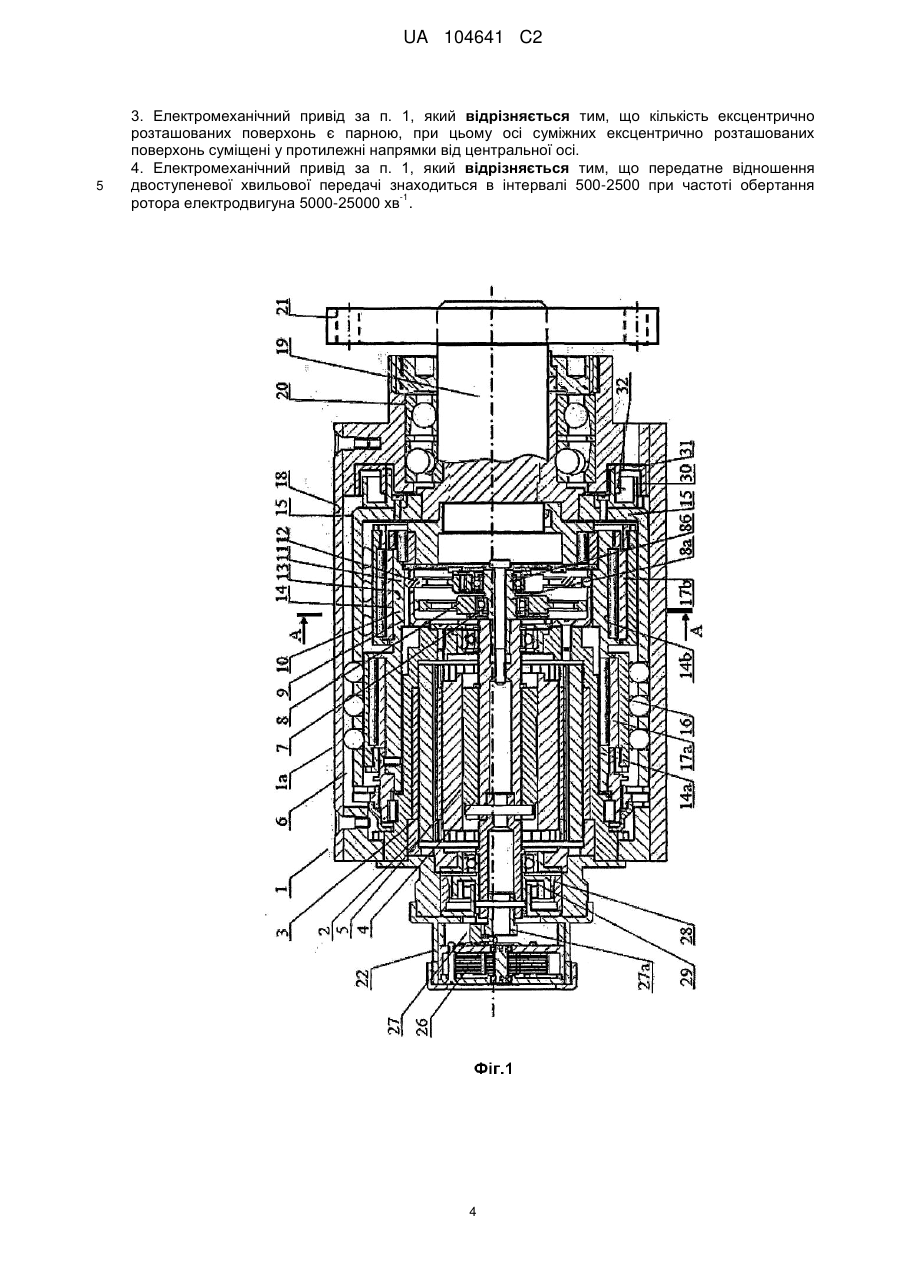
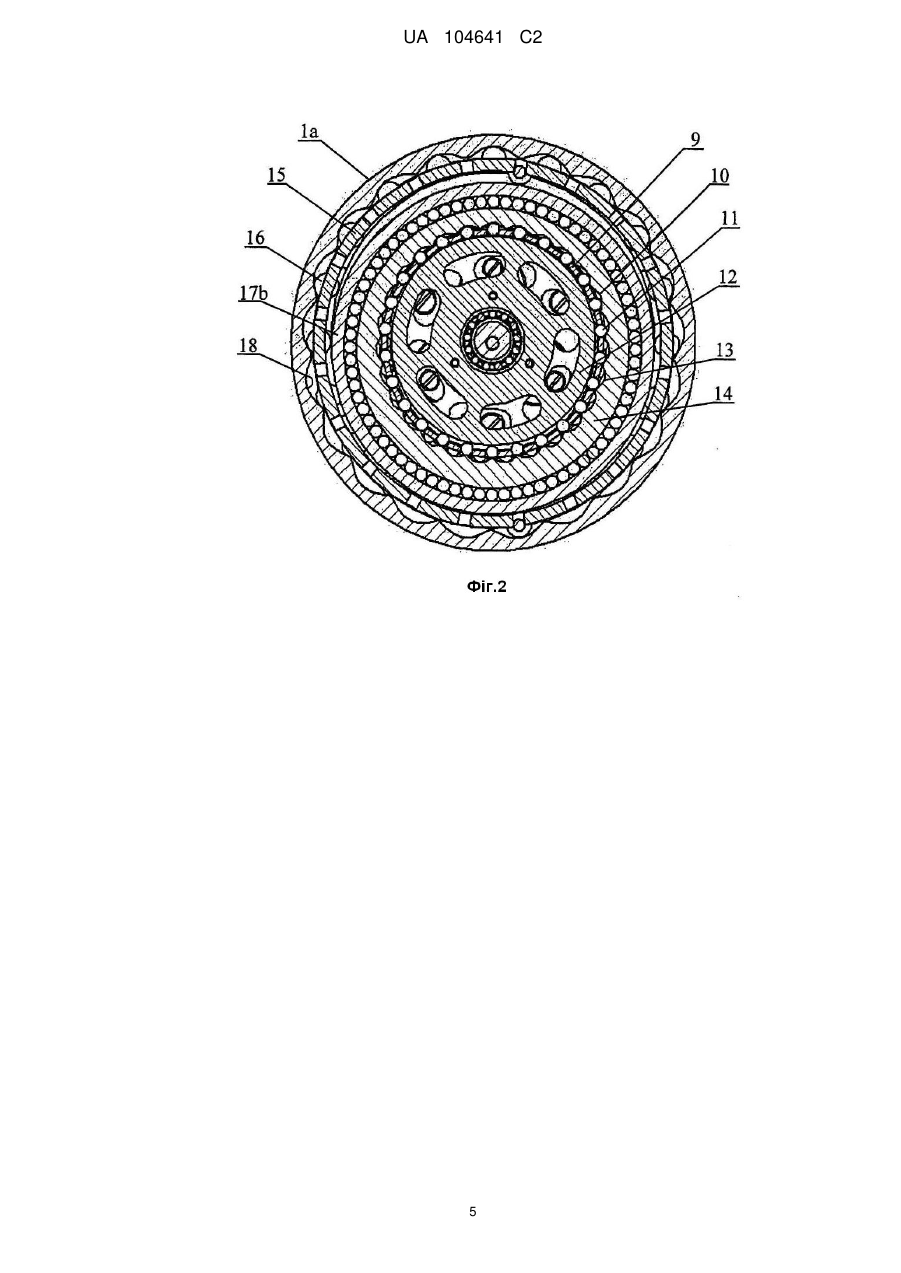
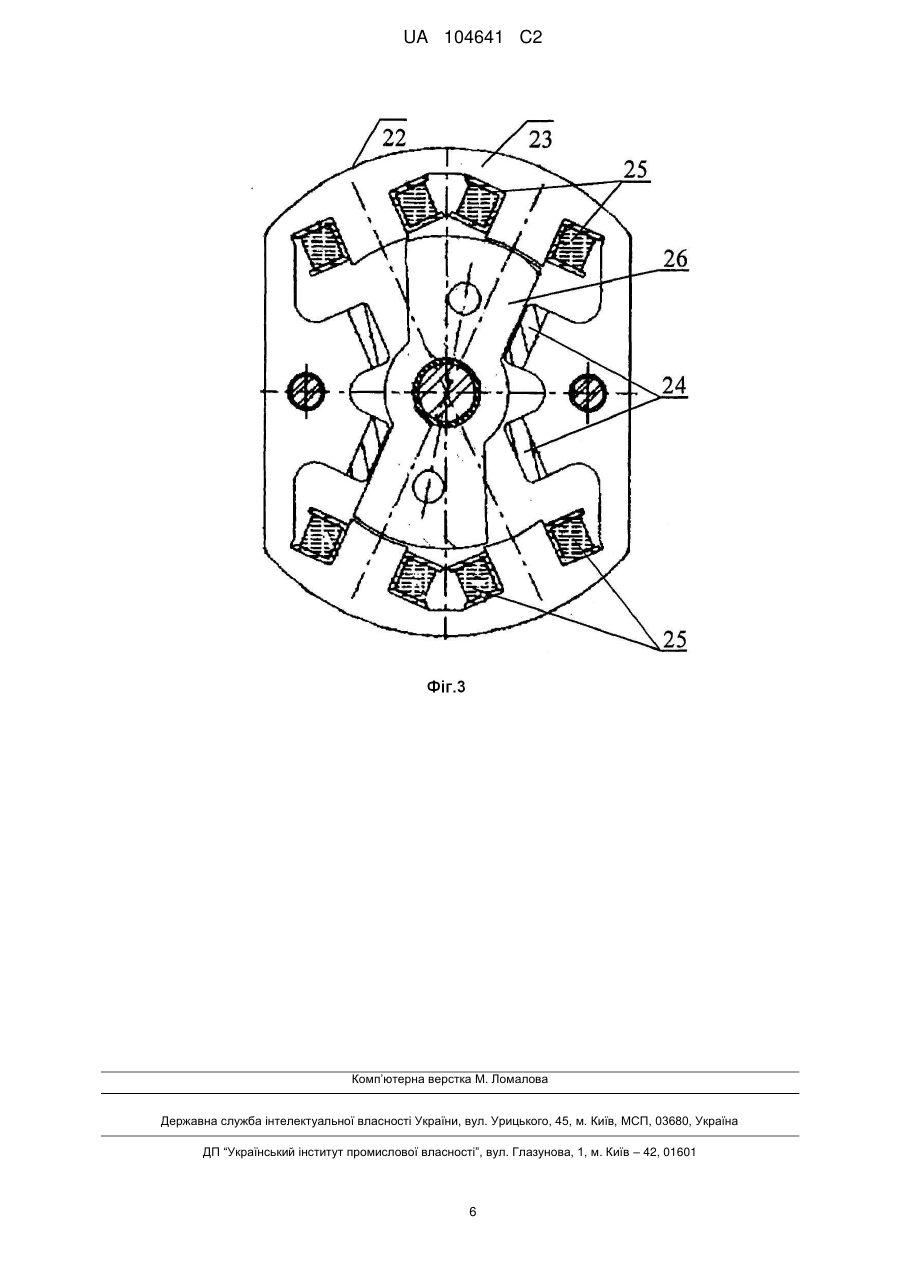
Реферат: Винахід належить до галузі машинобудування та авіабудування та може бути застосований у приводах автоматичних систем управління літальних апаратів, робототехнічних, антенних та інших електромеханічних силових системах. Електромеханічний привід складається з вузлів, розташованих концентрично відносно центральної осі: корпуса, електродвигуна, двоступеневої передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол, сепаратора першого ступеня хвильової передачі з переміщуваними відносно хвилеутворювача у жорсткому колесі першого ступеня тілами кочення; сепаратор другого ступеня з розміщеними в ньому тілами кочення, що переміщуються ексцентрично розташованими на жорсткому колесі кільцями відносно другого хвилеутворювача на внутрішній поверхні корпуса; вихідного вала, що спирається на тіла кочення та підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу; стопорного пристрою, статор якого з двома парами постійних магнітів та обмоток жорстко з'єднаний з корпусом, а якір кінематично зв'язаний з валом ротора електродвигуна; датчика положення ротора електродвигуна, з'єднаного з валом; датчика положення вихідного вала, при цьому корпус є нерухомою частиною електромеханічного приводу, електродвигун розташований всередині жорсткого колеса двоступеневої хвильової передачі, ексцентриковий вузол першого ступеня розташований поза ротором електродвигуна, вихідний вал приєднаний до сепаратора другого ступеня. UA 104641 C2 (12) UA 104641 C2 UA 104641 C2 5 10 15 20 25 30 35 40 45 50 55 Галузь техніки Винахід належить до галузі машинобудування та авіабудування та може бути застосований у приводах автоматичних систем управління літальних апаратів, робототехнічних, антенних та інших електромеханічних силових системах. Попередній рівень техніки Відомий силовий мініпривід (патент RU № 2321138 від 10.01.2007, заявка WO № 2008/085082 А1 від 12.07.2007), що складається з вузлів, розташованих концентрично відносно центральної осі: корпусу з циліндричною та торцевими частинами, електродвигуна, що має статор та закріплений на валу ротор; двоступеневої хвильової передачі з вхідним валом, що має ексцентрично розташовані поверхні, з'єднаним з ротором електродвигуна; сепаратора першого ступеня хвильової передачі з розміщеними в ньому у кілька рядів тілами кочення, що переміщуються робочими дисками відносно хвилеутворювача у жорсткому колесі, яке має на зовнішній частині ексцентрично розташовані поверхні; другий сепаратор з розміщеними в ньому у кілька рядів тілами кочення, що переміщуються кільцями, надітими на ексцентрично розташовані на жорсткому колесі поверхні, відносно другого хвилеутворювача, який розміщений на внутрішній поверхні циліндричної частини корпусу; вихідного вала, що спирається на тіла кочення та підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою, статор якого кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм та електродвигуном датчика положення ротора електродвигуна, жорстко з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом. Недолік силового мініприводу - у значній інерційності порожнистого ротора більшого діаметра, всередині якого розміщений ексцентриковий вузол, частина сепаратора і частина жорсткого колеса першого ступеня двоступеневої хвильової передачі. Цей недолік обмежує величину прискорення ротора при допустимих втратах у двигуні (втрати у міді) та не дозволяє забезпечити підвищену керованість об'єктів, що приводяться електромеханічним приводом. Крім того, у мініприводі масивний корпус є вихідним валом. Розкриття винаходу Технічне завдання, що вирішується винаходом - зниження моменту інерції ротора електродвигуна та вихідного вала, збільшення наявного прискорення об'єкта при допустимому значенні втрат у двигуні (втрат у міді), високому передавальному відношенні хвильового редуктора та великому крутному моменті на вихідному валу електромеханічного приводу. Технічне завдання вирішене у конструкції електромеханічного приводу, що складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевою частинами, електродвигуна, що має статор та закріплений на валу ротор; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними в ньому у кілька рядів тілами кочення, переміщуваними робочими дисками відносно хвилеутворювача у жорсткому колесі, що має на зовнішній частині ексцентрично розташовані поверхні; другий сепаратор з розміщеними в ньому у кілька рядів тілами кочення, що переміщуються кільцями, надітими на ексцентрично розташовані на жорсткому колесі поверхні, відносно другого хвилеутворювача, розташованого на внутрішній поверхні циліндричної частини корпусу; вихідного вала, що спирається на тіла кочення та підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів та обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм та електродвигуном датчика положення ротора електродвигуна, ротор якого жорстко з'єднаний з валом ротора електродвигуна; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом, при цьому корпус є нерухомою частиною електромеханічного приводу, електродвигун розташований всередині жорсткого колеса двоступеневої хвильової передачі, ексцентриковий вузол першого ступеня розташований поза ротором електродвигуна, вихідний вал приєднаний до сепаратора другого ступеня. Для значного зменшення моменту інерції ротора при заданому крутному моменті електродвигуна відношення довжини статора до його внутрішнього діаметра перебуває в інтервалі 1-2. 1 UA 104641 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для підвищення рівномірності роботи хвильової передачі кількість ексцентрично розташованих поверхонь є парною, при цьому осі суміжних поверхонь зміщені в протилежних напрямках від центральної осі. Для значного збільшення крутного моменту на вихідному валу електромеханічного приводу -1 за частоти обертання ротора електродвигуна 5000-25000 хв передавальне відношення двоступеневої хвильової передачі перебуває в інтервалі 500-2500. Технічний ефект, що отримується від винаходу - збільшення наявного прискорення об'єкта при допустимому значенні втрат у двигуні (втрат у міді) при високому крутному моменті на вихідному валу електромеханічного двигуна, досягнутий за рахунок введення такої сукупності визначальних ознак: корпус є нерухомою частиною електромеханічного приводу, електродвигун розташований всередині жорсткого колеса двоступеневої хвильової передачі, ексцентриковий вузол першого ступеня розташований поза ротором електродвигуна, вихідний вал приєднаний до сепаратора другого ступеня. Така сукупність ознак електромеханічного приводу, що забезпечує технічний ефект, не виявлена при проведенні патентно-інформаційних досліджень. Відповідно винахід відповідає критерію "новизна". Короткий опис креслень На фіг. 1/3 показаний поздовжній переріз електромеханічної передачі. На фіг. 2/3 - переріз А-А на фіг 1. На фіг. 3/3 - вигляд В на фіг. 1. Переважний приклад здійснення винаходу Електромеханічний привід (фіг. 1, 2) складається з вузлів, розташованих концентрично відносно центральної осі: корпуса 1 з циліндричною частиною 1а, що є нерухомою частиною електромеханічного приводу, електродвигуна 2, що має статор 3 і закріплений на валу 4 ротор 5; двоступеневої хвильової передачі 6 із вхідним валом 7, що має ексцентриковий вузол 8 з ексцентрично розташованими поверхнями 8а та 8b, з'єднаний з валом 4; сепаратора 9 (фіг. 2) першого ступеня 10 хвильової передачі 6 з розміщеними в ньому у кілька рядів тілами кочення 11, що переміщуються робочими дисками 12 відносно хвилеутворювача 13 у жорсткому колесі 14, яке має на зовнішній частині ексцентрично розташовані поверхні 14а, 14b (фіг. 1); другий сепаратор 15 з розміщеними на ньому у кілька рядів тілами кочення 16, що переміщуються кільцями 17а та 17b (фіг. 1, 2), надітими на ексцентрично розташовані на жорсткому колесі 14 поверхні 14а, 14b, відносно другого хвилеутворювача 18, розміщеного на внутрішній поверхні циліндричної частини 1а корпуса 1; вихідного вала 19 (фіг. 1), з'єднаного із сепаратором, який спирається на тіла кочення 16 та підшипники кочення 20, із фланцем 21, що приєднується до привідного об'єкта регулювання (не показаний); вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою 22 (фіг. 3), статор 23 якого з двома парами постійних магнітів 24 та обмоток 25 жорстко з'єднаний з корпусом 1, а якір 26 через стопор 27 (фіг. 1) кінематично зв'язаний з валом 4 ротора 5; розташованого між стопорним пристроєм 22 (фіг. 1, 3) та електродвигуном 2 датчика 28 положення ротора 5 електродвигуна 2, ротор 29 якого жорстко з'єднаний з валом 4; датчика 30 положення вихідного вала 19, розміщеного таким чином, що його статор 31 кріпиться до нерухомо закріпленої деталі корпуса 1, а ротор 32 - до сепаратора 15, з'єднаного з вихідним валом 19. Розташування електродвигуна 2 всередині жорсткого колеса 14 двоступеневої хвильової передачі 6, ексцентрикового вузла 8 першого ступеня 10 хвильової передачі 6 поза ротором електродвигуна 2 та приєднання вихідного вала 19 до сепаратора 15 забезпечує зниження моменту інерції обертових деталей та технічний ефект - збільшення наявного прискорення об'єкта при допустимому значенні втрат у двигуні (втрат у міді) при високому крутому моменті на вихідному валу електромеханічного двигуна. Відношення довжини статора 3 до його внутрішнього діаметра перебуває в інтервалі 1-2. Кількість ексцентрично розташованих на вхідному валу 7 або на жорсткому колесі 14 поверхонь 8а, 8b, 14f, 14b найкраще є парним, при цьому осі суміжних поверхонь зміщені у протилежні напрямки від центральної осі. Передатне відношення двоступеневої хвильової передачі 6 перебуває в інтервалі 500-2500 -1 при частоті обертання 5000-25000 хв ротора 5 електродвигуна 2. За передатного відношення -1 менше 500 та частоти обертання ротора 5 менше 5000 хв забезпечення необхідного моменту досягається при значеннях струму, за яких відбувається посилене нагрівання електродвигуна за -1 рахунок теплових втрат в обмотці. За частоти обертання більше 25000 хв у роторі 5 виникають значні напруги від відцентрових сил. При включенні електромеханічного приводу подається напруга на пару обмоток 25 статора 23 стопорного пристрою 22 (фіг. 3), якір 25 повертається, розриваючи кінематичний зв'язок стопора 27 із зубчастим колесом 27а, з'єднаним з валом 4, і таким чином вивільняє вал 4. Якір 2 UA 104641 C2 5 10 15 20 25 30 26 фіксується в цьому положенні постійними магнітами 24 після зняття напруги з обмоток 25 статора 23 стопорного пристрою 22. Блок управління електромеханічного приводу (не показаний) на основі командного сигналу, сигналів із сигнальних обмоток датчика 30 (фіг. 1), положення вихідного вала 19 і датчика 28 положення ротора 5, зрушує ротор 5, вал 4 і з'єднаний з ним вхідний вал 7 першого ступеня хвильової передачі 6. При обертанні вхідного вала 7 обертаються ексцентрично розташовані поверхні 8а і 8b таким чином, що їх ексцентрично зміщені осі та диски 12 здійснюють за одне обертання вхідного вала 7 повне обертання навколо його осі. Сепаратор 9 дозволяє тілам кочення 11 переміщуватися тільки в радіальному напрямі, здійснюючи хвилеподібні рухи з періодом, що дорівнює періоду одного обертання вхідного вала 7 та амплітудою, що дорівнює подвійному ексцентриситету поверхні 8а та 8b. Тіла кочення 11, взаємодіючи з профільованою поверхнею хвилеутворювача 13 жорсткого колеса 14, повертають його на кут, менший кута повороту вхідного вала 7 у кількість разів, що дорівнює кількості хвиль профільованої поверхні хвилеутворювача 13 жорсткого колеса 14. Поворот жорсткого колеса 14 першого ступеня хвильової передачі 6 зрушує ексцентрично розташовані поверхні 14а і 14b, при цьому ексцентрично зміщені осі поверхонь 14а та 14b кільця здійснюють за одне обертання жорсткого колеса 14 повне обертання навколо його осі. Сепаратор 15 дозволяє тілам кочення 16 переміщуватися у гніздах в радіальному напрямку таким чином, що тіла кочення 16 при русі коліс здійснюють складний рух, який є сукупністю обертового руху сепаратора 15 та радіального руху в гніздах сепаратора 15 з амплітудою, що дорівнює подвоєному ексцентриситету поверхні 14а або 14b. Тіла кочення 16, взаємодіючи з поверхнею другого хвилеутворювача 18, закріпленого нерухомо, повертають сепаратор 15 на кут, менший кута повороту жорсткого колеса 14 у кількість разів, на одиницю меншу кількості хвиль внутрішньої профільованої поверхні хвилеутворювача 18. Разом із сепаратором 15 повертається вихідний вал 19. При відключенні електромеханічного приводу подається напруга на пару обмоток 25 статора 23 стопорного пристрою 22, якір 26 обертається у вихідне положення, забезпечуючи кінематичний зв'язок 27а стопора 27 та фіксуючи вал 4 ротора 5 електродвигуна 2. Якір 26 фіксується у вихідному положенні постійними магнітами 24 після зняття напруги з обмоток статора 25 стопорного пристрою 22. Вихідний вал 19 утримується у заданому положенні. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Електромеханічний привід, що складається з вузлів, розташованих концентрично відносно центральної осі: корпуса з циліндричною та торцевими частинами, електродвигуна, що має статор та закріплений на валу ротор; двоступеневої хвильової передачі з приєднаним до ротора електродвигуна вхідним валом, що має ексцентриковий вузол з ексцентрично розташованими поверхнями; сепаратора першого ступеня хвильової передачі з розміщеними у ньому у кілька рядів тілами кочення, що переміщуються встановленими на ексцентрично розташованих поверхнях робочими дисками відносно хвилеутворювача у жорсткому колесі першого ступеня, яке має на зовнішній частині ексцентрично розташовані поверхні для другого ступеня; сепаратор другого ступеня з розміщеними в ньому у кілька рядів тілами кочення, що переміщуються кільцями, встановленими на ексцентрично розташованих на жорсткому колесі поверхнях, відносно другого хвилеутворювача на внутрішній поверхні циліндричної частини корпуса; вихідного вала, що спирається на тіла кочення та підшипники кочення; вузлів, що забезпечують управління роботою електромеханічного приводу: стопорного пристрою, статор якого з двома парами постійних магнітів та обмоток жорстко з'єднаний з корпусом, а якір через стопор кінематично зв'язаний з валом ротора електродвигуна; розташованого між стопорним пристроєм та електродвигуном датчика положення ротора електродвигуна, з'єднаного з його валом; датчика положення вихідного вала, розміщеного таким чином, що його статор кріпиться до нерухомо закріпленої деталі другого ступеня хвильової передачі, а ротор - до рухомої деталі, з'єднаної з вихідним валом, який відрізняється тим, що корпус є нерухомою частиною електромеханічного приводу, електродвигун розташований всередині жорсткого колеса двоступеневої хвильової передачі, ексцентриковий вузол першого ступеня розташований поза ротором електродвигуна, вихідний вал приєднаний до сепаратора другого ступеня. 2. Електромеханічний привід за п. 1, який відрізняється тим, що співвідношення довжини статора та його внутрішнього діаметра знаходиться в інтервалі 1-2. 3 UA 104641 C2 5 3. Електромеханічний привід за п. 1, який відрізняється тим, що кількість ексцентрично розташованих поверхонь є парною, при цьому осі суміжних ексцентрично розташованих поверхонь суміщені у протилежні напрямки від центральної осі. 4. Електромеханічний привід за п. 1, який відрізняється тим, що передатне відношення двоступеневої хвильової передачі знаходиться в інтервалі 500-2500 при частоті обертання -1 ротора електродвигуна 5000-25000 хв . 4 UA 104641 C2 5 UA 104641 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical actuator
Назва патенту російськоюЭлектромеханический привод
Автори російськоюАлексашин Анатолий Алексеевич, Нестеров Виктор Антонович, Урсу Валентин Евгеньевич
МПК / Мітки
МПК: H02K 7/116, F04B 1/20
Мітки: привід, електромеханічний
Код посилання
<a href="https://ua.patents.su/8-104641-elektromekhanichnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний привід</a>
Електромеханічний привід шиберного затвора

Номер патенту: 39728
Опубліковано: 15.06.2001
Автори: Цихмістро Олена Сергійовна, Ошовська Олена Володимирівна, Лифенко Микола Трохимович, Єронько Сергій Петрович, Руденко Ростислав Володимирович, Білобров Юрій Миколаєвич
МПК: B22D 41/08
Мітки: шиберного, електромеханічний, затвора, привід
Формула / Реферат:
1. Електромеханічний привід шиберного затвора, до складу якого входять електричний двигун, кінематично зв'язаний з швидкохідним валом редуктора, який складається з коробчастої форми корпусу з двома внутрішніми подовжніми стінками, система зубчастих передач та тихохідний вал, який виконаний одноколінним та наділений шатуном, який відрізняється тим, що шийки одноколінного вала обладнані нерухомо закріпленими зубчастими колесами, які...
Електромеханічний осьовий привід варіатора
Номер патенту: 63458
Опубліковано: 17.07.2006
Автор: Власов Іван Петрович
МПК: F16H 25/00, F16H 25/20, A01D 69/00, F16H 9/26
Мітки: електромеханічний, привід, варіатора, осьовий
Формула / Реферат:
1. Спосіб екстракційного вилучення мікрокількостей рутенію (III) при сумісній присутності з паладієм (II), родієм (ПІ) та кольоровими металами, який включає утворення комплексних сполук цих металів з органічними реагентами, послідовне вилучення екстрагуванням органічним розчинником спочатку сполук паладію та кольорових металів, а потім сполук рутенію, вимірювання оптичної густини екстрактів, за якими визначають вміст Ru(III), який...
Електромеханічний осьовий привід варіатора
Номер патенту: 52774
Опубліковано: 15.01.2003
Автор: Власов Іван Петрович
МПК: F16H 25/20, F16H 9/02, A01D 69/00
Мітки: варіатора, електромеханічний, осьовий, привід
Формула / Реферат:
1. Електромеханічний осьовий привід варіатора, що містить утворений рухомим і взаємодіючим із ним через сателіти нерухомим центральними зубчастими колесами планетарний редуктор, корпус якого з'єднаний по торцях з електродвигуном і з циліндричним корпусом приводу з встановленими в ньому і взаємодіючими між собою гвинтом із двома зовнішніми опорними підшипниками і гайкою, що виконана як одне ціле з порожнистим штоком із кріпильним елементом на...
Електромеханічний осьовий привід варіатора
Номер патенту: 67002
Опубліковано: 17.07.2006
Автори: Власов Іван Петрович, Цепур Леонід Іванович
МПК: F16H 25/00, F16H 25/20, A01D 69/00, F16H 9/26
Мітки: варіатора, осьовий, електромеханічний, привід
Формула / Реферат:
Висівний апарат сівалки, що містить прямокутний конусоподібний бункер для насіння з одним отвором на його задній стінці, роторний щітковий механізм усередині бункера й один поворотний висівний диск з отворами різного розміру, що встановлений із зовнішньої сторони на задній стінці бункера, який відрізняється тим, що бункер для насіння має два поворотних висівних диски з отворами різного розміру, що встановлені із зовнішніх боків на задній і...
Привід основов’язальної машини
Номер патенту: 77655
Опубліковано: 25.02.2013
Автори: Чабан Віталій Васильович, Піпа Борис Федорович
МПК: D04B 23/00
Мітки: машини, основов'язальної, привід
Формула / Реферат:
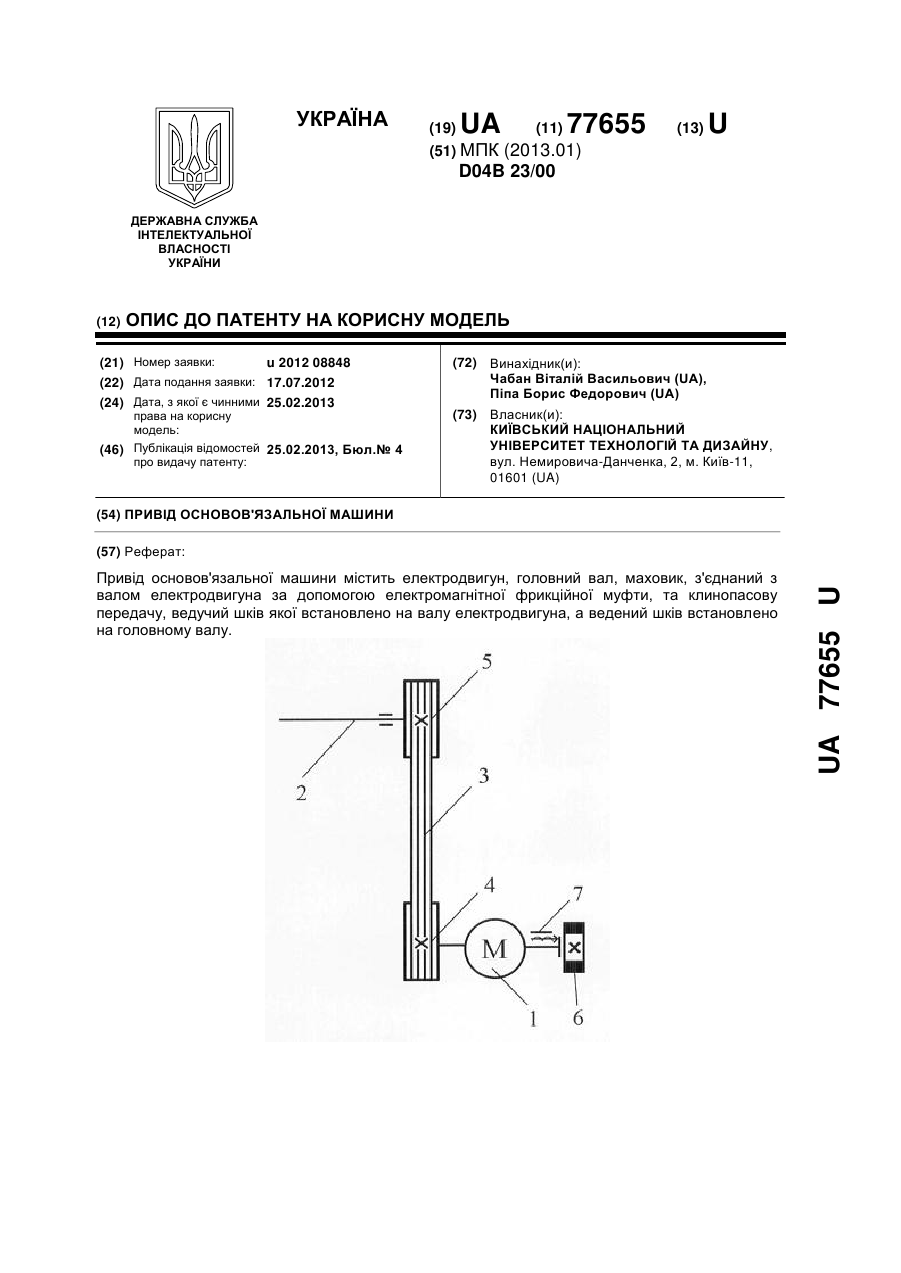
Привід основов'язальної машини, що містить електродвигун, головний вал та клинопасову передачу, ведучий шків якої встановлено на валу електродвигуна, а ведений шків встановлено на головному валу, який відрізняється тим, що додатково обладнаний маховиком та електромагнітною фрикційною муфтою, причому маховик з'єднаний з валом електродвигуна за допомогою електромагнітної фрикційної муфти.
Попередній патент: Пристрій для одержання зливків мультикристалічного кремнію індукційним методом та холодний тигель, використаний в ньому
Наступний патент: Електромеханічний привід
Випадковий патент: Двопотоковий гідропривід одноковшового екскаватора