Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 108731
Опубліковано: 25.07.2016
Автори: Варавва Микола Олегович, Мусаєв Ікрам Мохтарам огли, Грабко Валентин Володимирович, Грабко Володимир Віталійович


Формула / Реферат
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, два генератори імпульсів, дільник частоти, три елементи І, три цифрових компаратори, датчик положення, блок задання положення, розподілювач тактів, два регістри, цифровий суматор, два тригери, блок задання швидкості, індикатор, n окремих інфрачервоних сенсорів інфрачервоного приймача, блок підготовки даних, комутатор, буферний регістр, лічильник, два керованих підсилювачі, відеоконтрольний блок, генератор напруги, блок пам'яті, причому вихід дільника частоти підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних з'єднані з виходом комутатора, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів інфрачервоного приймача, вихід блока підготовки даних підключений в кола ЕОМ, вихідна цифрова шина блока задання положення з'єднана з першою вхідною цифровою шиною першого цифрового компаратора, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого та другого регістрів підключені до вихідної цифрової шини датчика положення, вихід першого цифрового компаратора з'єднаний з першим входом першого елемента І, другий вхід якого підключений до першого виходу другого тригера, а вихід з'єднаний з першим входом першого тригера, другий вхід якого разом з входом індикатора підключені до другого виходу другого тригера, вихід другого елемента І з'єднаний з другим входом блока підготовки даних, друга вхідна цифрова шина другого цифрового компаратора підключена до вихідної цифрової шини блока задання швидкості, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого та другого регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів, третій вихід якого підключений до другого входу другого тригера, вихідні цифрові шини першого та другого регістрів з'єднані відповідно з першою і другою вхідними цифровими шинами третього цифрового компаратора, вихід якого підключений до першого входу третього елемента І, другий вхід якого з'єднаний з виходом другого цифрового компаратора, а вихід підключений до першого входу другого тригера, вихід першого тригера з'єднаний з першим входом другого елемента І, другий вхід якого підключений до виходу першого генератора імпульсів, а вихід з'єднаний зі входами дільника частоти, генератора напруги та комутатора, який відрізняється тим, що в нього введено диференціюючий елемент, елемент HI та четвертий елемент І, причому вихід першого цифрового компаратора підключений до входу диференціюючого елемента, вихід якого з'єднаний з другим входом розподілювача тактів та зі входом елемента HI, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з виходом другого генератора імпульсів, а вихід підключений до першого входу розподілювача тактів.
Текст
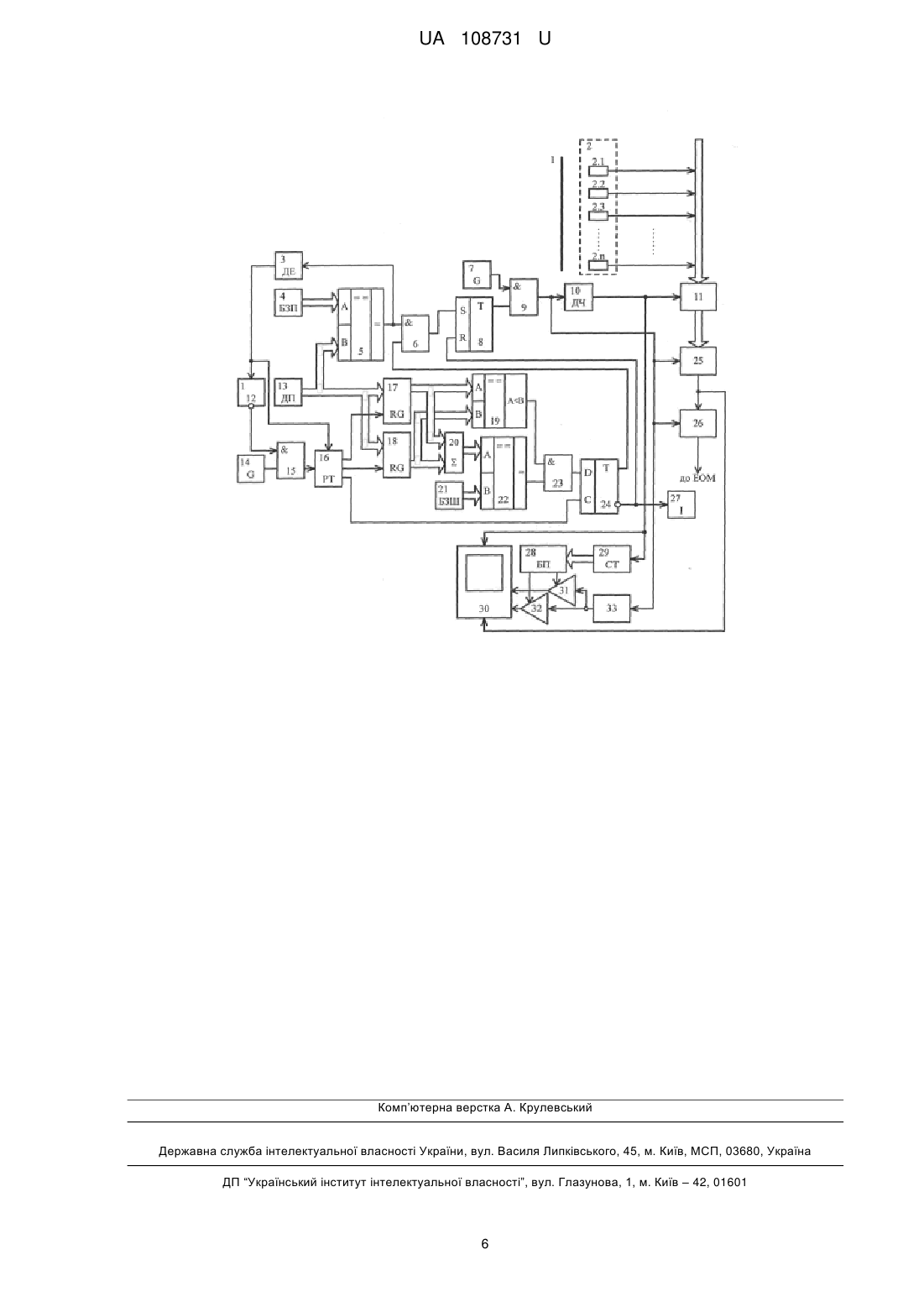
Реферат: Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, два генератори імпульсів, дільник частоти, три елементи І, три цифрових компаратори, датчик положення, блок задання положення, розподілювач тактів, два регістри, цифровий суматор, два тригери, блок задання швидкості, індикатор, n окремих інфрачервоних сенсорів інфрачервоного приймача, блок підготовки даних, комутатор, буферний регістр, лічильник, два керованих підсилювачі, відеоконтрольний блок, генератор напруги, блок пам'яті. Також додатково містить диференціюючий елемент, елемент HI та четвертий елемент І. UA 108731 U (54) ПРИСТРІЙ ДЛЯ БЕЗКОНТАКТНОГО ВИМІРЮВАННЯ ТЕМПЕРАТУРИ РОТОРА ГІДРОГЕНЕРАТОРА UA 108731 U UA 108731 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до безконтактної термометрії і може бути використана для вимірювання температури об'єктів, що обертаються, зокрема ротора гідрогенераторів. Відомий пристрій для безконтактного вимірювання температури ротора гідрогенератора (Патент України № 66866, М. кл. G01К 13/08, бюл. № 2, 2012), що містить об'єктив, дільник частоти, вихід якого підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних з'єднані з виходом комутатора, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів інфрачервоного приймача, вихід блока підготовки даних підключений в кола ЕОМ, вихідна цифрова шина блока задання положення з'єднана з першою вхідною цифровою шиною першого цифрового компаратора, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого та другого регістрів підключені до вихідної цифрової шини датчика положення, вихід першого цифрового компаратора з'єднаний з першим входом першого елемента І, другий вхід якого підключений до першого виходу другого тригера, а вихід з'єднаний з першим входом першого тригера, другий вхід якого разом з входом індикатора підключені до другого виходу другого тригера, перший вхід якого з'єднаний з виходом другого цифрового компаратора, друга вхідна цифрова шина якого підключена до вихідної цифрової шини блока задання швидкості, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого та другого регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів, третій вихід якого підключений до другого входу другого тригера, вихід другого генератора імпульсів з'єднаний з входом розподілювача тактів, вихід першого тригера підключений до першого входу другого елемента І, другий вхід якого з'єднаний з виходом першого генератора імпульсів, а вихід підключений до входів дільника частоти, генератора напруги, комутатора та до другого входу блока підготовки даних. Головним недоліком даного пристрою є те, що при визначенні швидкості обертання ротора гідрогенератора можуть виникати помилки, обумовлені відсутністю контролю за початковим кодом датчика положення. За найближчий аналог вибрано пристрій для безконтактного вимірювання температури ротора гідрогенератора (Патент України № 80569, М. кл. G01К 13/08, бюл. № 11, 2013), що містить об'єктив, дільник частоти, вихід якого підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних з'єднані з виходом комутатора, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів інфрачервоного приймача, вихід блока підготовки даних підключений в кола ЕОМ, вихідна цифрова шина блока задання положення з'єднана з першою вхідною цифровою шиною першого цифрового компаратора, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого та другого регістрів підключені до вихідної цифрової шини датчика положення, вихід першого цифрового компаратора з'єднаний з першим входом першого елемента І, другий вхід якого підключений до першого виходу другого тригера, а вихід з'єднаний з першим входом першого тригера, другий вхід якого разом з входом індикатора підключені до другого виходу другого тригера, вихід другого елемента І з'єднаний з другим входом блока підготовки даних, друга вхідна цифрова шина другого цифрового компаратора підключена до вихідної цифрової шини блока задання швидкості, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого та другого регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів, третій вихід якого підключений до другого входу другого тригера, вихід другого генератора імпульсів з'єднаний з входом розподілювача тактів, вихід першого тригера підключений до першого входу другого елемента І, другий вхід якого з'єднаний з виходом першого генератора імпульсів, а вихід підключений до входів дільника частоти, генератора напруги та комутатора, вихідні цифрові шини першого та другого регістрів з'єднані відповідно з першою і другою вхідними цифровими 1 UA 108731 U 5 10 15 20 25 30 35 40 45 50 55 60 шинами третього цифрового компаратора, вихід якого підключений до першого входу третього елемента І, другий вхід якого з'єднаний з виходом другого цифрового компаратора, а вихід підключений до першого входу другого тригера. Головним недоліком даного пристрою є те, що при визначенні швидкості обертання ротора гідрогенератора можуть виникати помилки обумовлені відсутністю контролю за початковим кодом датчика положення. Наприклад, коли в перший регістр записується код з датчика положення, що відповідає максимальному значенню, а в другий регістр записується код дещо більший коду, який відповідає нульовому положенню, то визначення швидкості в суматорі здійснюється некоректно. В основу корисної моделі поставлена задача створення пристрою для безконтактного вимірювання температури ротора гідрогенератора, в якому за рахунок введення нових блоків та зв'язків між ними з'являється можливість коректного визначення швидкості обертання, що дозволяє підвищити точність роботи пристрою. Поставлена задача вирішується тим, що в пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, два генератори імпульсів, дільник частоти, три елементи І, три цифрових компаратори, датчик положення, блок задання положення, розподілювач тактів, два регістри, цифровий суматор, два тригери, блок задання швидкості, індикатор, n окремих інфрачервоних сенсорів інфрачервоного приймача, блок підготовки даних, комутатор, буферний регістр, лічильник, два керованих підсилювачі, відеоконтрольний блок, генератор напруги, блок пам'яті, причому вихід дільника частоти підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних з'єднані з виходом комутатора, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів інфрачервоного приймача, вихід блока підготовки даних підключений в кола ЕОМ, вихідна цифрова шина блока задання положення з'єднана з першою вхідною цифровою шиною першого цифрового компаратора, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого та другого регістрів підключені до вихідної цифрової шини датчика положення, вихід першого цифрового компаратора з'єднаний з першим входом першого елемента І, другий вхід якого підключений до першого виходу другого тригера, а вихід з'єднаний з першим входом першого тригера, другий вхід якого разом з входом індикатора підключені до другого виходу другого тригера, вихід другого елемента І з'єднаний з другим входом блока підготовки даних, друга вхідна цифрова шина другого цифрового компаратора підключена до вихідної цифрової шини блока задання швидкості, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого та другого регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів, третій вихід якого підключений до другого входу другого тригера, вихідні цифрові шини першого та другого регістрів з'єднані відповідно з першою і другою вхідними цифровими шинами третього цифрового компаратора, вихід якого підключений до першого входу третього елемента І, другий вхід якого з'єднаний з виходом другого цифрового компаратора, а вихід підключений до першого входу другого тригера, вихід першого тригера з'єднаний з першим входом другого елемента І, другий вхід якого підключений до виходу першого генератора імпульсів, а вихід з'єднаний зі входами дільника частоти, генератора напруги та комутатора, введено диференціюючий елемент, елемент HI та четвертий елемент І, причому вихід першого цифрового компаратора підключений до входу диференціюючого елемента, вихід якого з'єднаний з другим входом розподілювача тактів та зі входом елемента HI, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з виходом другого генератора імпульсів, а вихід підключений до першого входу розподілювача тактів. Пристрій для безконтактного вимірювання температури ротора гідрогенератора пояснюється кресленням, на якому зображена його структурна схема. На схемі: 1 - об'єктив; 2 - інфрачервоний приймач, що містить n окремих інфрачервоних сенсорів; 3 - диференціюючий елемент; 4 - блок задання положення; 5 - перший цифровий компаратор; 6 - перший елемент І; 7 - перший генератор імпульсів; 8 - перший тригер; 9 - другий елемент І; 10 - дільник частоти; 11 - буферний регістр; 12 - елемент HI; 13 - датчик положення; 14 - другий генератор імпульсів; 15 - четвертий елемент І; 16 - розподілювач тактів; 17 - перший 2 UA 108731 U 5 10 15 20 25 30 35 40 45 50 55 60 регістр; 18 - другий регістр; 19 - третій цифровий компаратор; 20 - цифровий суматор; 21 - блок задання швидкості; 22 - другий цифровий компаратор; 23 - третій елемент І; 24 - другий тригер; 25 - комутатор; 26 - блок підготовки даних; 27 - індикатор; 28 - блок пам'яті; 29 - лічильник; 30 відеоконтрольний блок; 31, 32 - перший та другий керовані підсилювачі відповідно; 33 генератор напруги, причому вихід дільника частоти 10 підключений до входів буферного регістра 11, лічильника 29 та до першого входу відеоконтрольного блока 30, другий та третій входи якого з'єднані відповідно з виходами першого 31 та другого 32 керованих підсилювачів, перші входи яких підключені до виходу генератора напруги 33, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті 28, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника 29, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних 26 з'єднані з виходом комутатора 25, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра 11, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів 2.1-2.n інфрачервоного приймача 2, вихід блока підготовки даних 26 підключений в кола ЕОМ, вихідна цифрова шина блока задання положення 4 з'єднана з першою вхідною цифровою шиною першого цифрового компаратора 5, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого 17 та другого 18 регістрів підключені до вихідної цифрової шини датчика положення 13, вихід першого цифрового компаратора 5 з'єднаний з першим входом першого елемента І 6, другий вхід якого підключений до першого виходу другого тригера 24, а вихід з'єднаний з першим входом першого тригера 8, другий вхід якого разом з входом індикатора 27 підключені до другого виходу другого тригера 24, вихід другого елемента І 9 з'єднаний з другим входом блока підготовки даних 26, друга вхідна цифрова шина другого цифрового компаратора 22 підключена до вихідної цифрової шини блока задання швидкості 21, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора 20, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого 17 та другого 18 регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів 16, третій вихід якого підключений до другого входу другого тригера 24, вихідні цифрові шини першого 17 та другого 18 регістрів з'єднані відповідно з першою і другою вхідними цифровими шинами третього цифрового компаратора 19, вихід якого підключений до першого входу третього елемента І 23, другий вхід якого з'єднаний з виходом другого цифрового компаратора 22, а вихід підключений до першого входу другого тригера 24, вихід першого тригера 8 з'єднаний з першим входом другого елемента І 9, другий вхід якого підключений до виходу першого генератора імпульсів 7, а вихід з'єднаний зі входами дільника частоти 10, генератора напруги 33 та комутатора 11, вихід першого цифрового компаратора 5 підключений до входу диференціюючого елемента 3, вихід якого з'єднаний з другим входом розподілювача тактів 16 та зі входом елемента HI 12, вихід якого підключений до першого входу четвертого елемента І 15, другий вхід якого з'єднаний з виходом другого генератора імпульсів 14, а вихід підключений до першого входу розподілювача тактів 16. Запропонований пристрій працює так. При подачі напруги живлення перший 7 та другий 14 генератори імпульсів починають формувати відповідні послідовності імпульсів. Потік інфрачервоного випромінювання, який створюється поверхнею ротора гідрогенератора, що знаходиться на деякій відстані від оптичної системи пристрою, потрапляє через об'єктив 1 на лінійку n окремих інфрачервоних сенсорів 2.1-2.n інфрачервоного приймача 2, розташованих вздовж радіуса ротора. Очевидно, що при обертанні ротора гідрогенератора в кожен момент часу в поле зору інфрачервоного приймача 2 потрапляє лише фрагмент поверхні вздовж радіуса ротора. Отримуючи фрагменти теплового зображення, можна побудувати тепловий портрет всієї поверхні ротора гідрогенератора в процесі його роботи. Якщо ротор гідрогенератора знаходиться в нерухомому стані або його швидкість обертання менша від номінальної, то на екран відеоконтрольного блока 30 теплове зображення поверхні ротора не виводиться. Це обумовлено наступним. Під впливом сигналів другого генератора імпульсів 14 почергово на виходах розподілювача тактів 16 формуються сигнали. Сигналом з першого виходу розподілювача тактів 16 в перший регістр 17 записується код з виходу датчика положення 13. В другий регістр 18 сигналом з другого виходу розподілювача тактів 16 записується інший код з виходу датчика положення 13. Різниця зазначених кодів за одиницю часу, що забезпечується другим генератором імпульсів 14, являє собою швидкість обертання ротора гідрогенератора, що і визначається в цифровому суматорі 20 та подається на перший вхід другого цифрового компаратора 22, в якому здійснюється порівняння у вигляді кодів поточної швидкості обертання ротора гідрогенератора з номінальною, яка записана в блоці задання швидкості 21. Одночасно сигнали з виходів першого 17 та другого 18 регістрів надходять на входи третього цифрового компаратора 19, де відбувається перевірка напряму 3 UA 108731 U 5 10 15 20 25 30 35 40 45 50 55 обертання ротора гідрогенератора. В разі коректного вимірювання швидкості, на виході третього цифрового компаратора 19 з'являється сигнал логічної одиниці, який відкриває третій елемент І 23. У випадку, коли швидкість менша від номінальної, на виході другого цифрового компаратора 22 з'являється сигнал логічного нуля, який через третій елемент І 23 під дією сигналу з третього виходу розподілювача тактів 16 записується в другий тригер 24. При цьому індикатор 27 залишається ввімкненим, тепловий портрет ротора не фіксується. Якщо ж швидкість обертання ротора гідрогенератора стає рівною номінальній, то на другому виході другого тригера 24 з'являється сигнал логічного нуля, індикатор 27 вимикається, на першому виході другого тригера 24 з'являється сигнал логічної одиниці, який подається на вхід першого елемента І 6. В момент обертання ротора, коли він знаходиться в умовному початковому положенні, коди з виходу датчика положення 13 та з виходу блока задання положення 4 співпадають, на виході першого цифрового компаратора 5 з'являється сигнал логічної одиниці, яким через перший елемент І 6 встановлюється в одиничний стан перший тригер 8. Внаслідок цього імпульси з виходу першого генератора імпульсів 7 через другий елемент І 9 починають надходити в блоки, за допомогою яких формується тепловий портрет на екрані відеоконтрольного блока 30. Коректність вимірювання швидкості обертання ротора гідрогенератора забезпечується так. В момент появи сигналу логічної одиниці на виході першого цифрового компаратора 5 на виході диференціюючого елемента 3 з'являється короткий імпульс, яким встановлюєтьсяу початкове положення розподілювач тактів 16. В цей момент через елемент HI 12 елемент І 15 закривається і подача імпульсів з другого генератора імпульсів 14 в розподілювач тактів 16 блокується. Після завершення імпульсу з виходу диференціюючого елемента 3 робота розподілювача тактів 16 розпочинається спочатку. Така дія дозволяє уникнути ситуації, коли в перший регістр 17 з датчика положення 13 записується код, який має значення, близьке до максимального, а в другий регістр 18 записується код, значення якого дещо більше за початкове. Очевидно, що при цьому обчислення швидкості ротора гідрогенератора буде некоректним. В залежності від кутової швидкості обертання ω ротора гідрогенератора вибрана частота формування імпульсів f 1 першого генератора імпульсів, що пов'язано співвідношенням f1/n=/(2m), де m=360°/, - мінімальний сектор поверхні ротора, що потрапляє в поле зору інфрачервоного приймача 2, n - коефіцієнт ділення дільника частоти 10, що відповідає кількості окремих інфрачервоних сенсорів інфрачервоного приймача 2. Отже, з частотою f1/n, при номінальній швидкості обертання ротора, на виході дільника частоти 10 з'являються імпульси, якими фіксуються у буферному регістрі 11 на час Τ=n/f1 електричні сигнали в аналоговому вигляді з виходів n окремих інфрачервоних сенсорів інфрачервоного приймача 2. Амплітуди цих сигналів пропорційні температурі елементарних ділянок поверхні об'єкта (кількість таких ділянок N=nm). Комутатором 25 здійснюється зчитування інформації з буферного регістра 11 з наступним її перетворенням із паралельного виду представлення в послідовний. Сформований таким чином сигнал з виходу комутатора 25 потрапляє на вхід відеоконтрольного блока 30 і на вхід блока підготовки даних 26, в якому він перетворюється в цифрову форму та приводиться до зручного виду для передачі в ЕОМ. Генератор напруги 33, перший 31 та другий 32 керовані підсилювачі і блок пам'яті 28 призначені для формування сигналів розгортки відеоконтрольного блока 30. Сигнал частотою f1, що надходить на вхід генератора напруги 33, на виході приймає ступінчасту форму (містить n складових) і подається на входи першого 31 і другого 32 керованих підсилювачів, коефіцієнт підсилення яких задається вихідними сигналами блока пам'яті 28. При цьому коефіцієнти підсилення першого 31 та другого 32 керованих підсилювачів задаються так, що на їх виходах формуються сигнали, пропорційні Risinj та Ricosj відповідно, де Ri - радіус, j - кут координати елементарної ділянки поверхні ротора в полярній системі координат, що обумовлено сигналами з датчика положення 13. При цьому i 0, n , j 0, m . На вхід блока пам'яті 28 сигнали надходять з лічильника 29, коефіцієнт перерахунку якого дорівнює m. В результаті на екрані відеоконтрольного блока 30 при наявності одного інформаційного сигналу, двох сигналів розгортки та сигналу з виходу дільника частоти 10 формується зображення, що відповідає тепловому портрету ротора гідрогенератора. Очевидно, що згідно з запропонованим алгоритмом сканування ротора гідрогенератора здійснюється спочатку вздовж деякого радіуса Rj. Коли закінчено сканування n точок, що лежать на радіусі Rj, здійснюється сканування n точок, що лежать на радіусі R j+1. Так знаходиться кругова розгортка всього теплового зображення ротора гідрогенератора в процесі його роботи. 60 4 UA 108731 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 35 40 Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, два генератори імпульсів, дільник частоти, три елементи І, три цифрових компаратори, датчик положення, блок задання положення, розподілювач тактів, два регістри, цифровий суматор, два тригери, блок задання швидкості, індикатор, n окремих інфрачервоних сенсорів інфрачервоного приймача, блок підготовки даних, комутатор, буферний регістр, лічильник, два керованих підсилювачі, відеоконтрольний блок, генератор напруги, блок пам'яті, причому вихід дільника частоти підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна цифрова шина якого підключена до вихідної цифрової шини лічильника, четвертий вхід відеоконтрольного блока разом з першим входом блока підготовки даних з'єднані з виходом комутатора, вхідна цифрова шина якого підключена до вихідної цифрової шини буферного регістра, вхідна цифрова шина якого з'єднана з виходами n окремих інфрачервоних сенсорів інфрачервоного приймача, вихід блока підготовки даних підключений в кола ЕОМ, вихідна цифрова шина блока задання положення з'єднана з першою вхідною цифровою шиною першого цифрового компаратора, друга вхідна цифрова шина якого разом з вхідними цифровими шинами першого та другого регістрів підключені до вихідної цифрової шини датчика положення, вихід першого цифрового компаратора з'єднаний з першим входом першого елемента І, другий вхід якого підключений до першого виходу другого тригера, а вихід з'єднаний з першим входом першого тригера, другий вхід якого разом з входом індикатора підключені до другого виходу другого тригера, вихід другого елемента І з'єднаний з другим входом блока підготовки даних, друга вхідна цифрова шина другого цифрового компаратора підключена до вихідної цифрової шини блока задання швидкості, а перша вхідна цифрова шина з'єднана з вихідною цифровою шиною цифрового суматора, перша і друга вхідні цифрові шини якого підключені відповідно до вихідних цифрових шин першого та другого регістрів, входи яких з'єднані відповідно з першим та другим виходами розподілювача тактів, третій вихід якого підключений до другого входу другого тригера, вихідні цифрові шини першого та другого регістрів з'єднані відповідно з першою і другою вхідними цифровими шинами третього цифрового компаратора, вихід якого підключений до першого входу третього елемента І, другий вхід якого з'єднаний з виходом другого цифрового компаратора, а вихід підключений до першого входу другого тригера, вихід першого тригера з'єднаний з першим входом другого елемента І, другий вхід якого підключений до виходу першого генератора імпульсів, а вихід з'єднаний зі входами дільника частоти, генератора напруги та комутатора, який відрізняється тим, що в нього введено диференціюючий елемент, елемент HI та четвертий елемент І, причому вихід першого цифрового компаратора підключений до входу диференціюючого елемента, вихід якого з'єднаний з другим входом розподілювача тактів та зі входом елемента HI, вихід якого підключений до першого входу четвертого елемента І, другий вхід якого з'єднаний з виходом другого генератора імпульсів, а вихід підключений до першого входу розподілювача тактів. 5 UA 108731 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01K 13/08
Мітки: гідрогенератора, температури, безконтактного, вимірювання, пристрій, ротора
Код посилання
<a href="https://ua.patents.su/8-108731-pristrijj-dlya-bezkontaktnogo-vimiryuvannya-temperaturi-rotora-gidrogeneratora.html" target="_blank" rel="follow" title="База патентів України">Пристрій для безконтактного вимірювання температури ротора гідрогенератора</a>
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80569
Опубліковано: 10.06.2013
Автори: Грабко Володимир Віталійович, Варавва Микола Олегович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: ротора, гідрогенератора, вимірювання, безконтактного, пристрій, температури
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, дільник частоти, вихід якого підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані відповідно з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80567
Опубліковано: 10.06.2013
Автори: Грабко Володимир Віталійович, Варавва Микола Олегович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: безконтактного, гідрогенератора, вимірювання, ротора, температури, пристрій
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, дільник частоти, вихід якого підключений до входу буферного регістра та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані з виходами першого та другого керованих підсилювачів, перші входи яких підключені до виходу генератора напруги, а другі входи з'єднані відповідно з першим та другим виходами блока пам'яті, вхідна...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 90253
Опубліковано: 26.05.2014
Автори: Варавва Микола Олегович, Бомбик Вадим Сергійович, Грабко Володимир Віталійович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: температури, пристрій, вимірювання, ротора, гідрогенератора, безконтактного
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, інфрачервоний приймач, що містить n окремих інфрачервоних сенсорів, дільник частоти, буферний регістр, комутатор, блок підготовки даних, два генератори імпульсів, два керовані підсилювачі, відеоконтрольний блок, лічильник, генератор напруги, блок пам'яті, датчик положення, блок задання положення, блок задання швидкості, розподілювач тактів, два...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 80566
Опубліковано: 10.06.2013
Автори: Варавва Микола Олегович, Грабко Володимир Віталійович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: температури, гідрогенератора, безконтактного, пристрій, ротора, вимірювання
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, за яким n дзеркал закріплені на оптичній лінійці таким чином, що їх площини утворюють кут 45° з головною оптичною віссю і на одній оптичній осі з дзеркалами встановлені n лінз, вихід дільника частоти підключений до входів буферного регістра, лічильника та до першого входу відеоконтрольного блока, другий та третій входи якого з'єднані з виходами...
Пристрій для безконтактного вимірювання температури ротора гідрогенератора
Номер патенту: 98350
Опубліковано: 27.04.2015
Автори: Грабко Володимир Віталійович, Варавва Микола Олегович, Грабко Валентин Володимирович
МПК: G01K 13/08
Мітки: ротора, гідрогенератора, пристрій, безконтактного, температури, вимірювання
Формула / Реферат:
Пристрій для безконтактного вимірювання температури ротора гідрогенератора, що містить об'єктив, інфрачервоний приймач, що містить n окремих інфрачервоних сенсорів, дільник частоти, буферний регістр, комутатор, блок підготовки даних, два генератори імпульсів, два керовані підсилювачі, відеоконтрольний блок, лічильник, генератор напруги та блок пам'яті, датчик положення, блок задання положення, блок задання швидкості, розподілювач тактів, два...
Попередній патент: Спосіб діагностики розвитку остеопорозу
Наступний патент: Система продувки азотом двигунів ракети-носія
Випадковий патент: Спосіб виробництва продукту для розчинного напою