Спосіб ослаблення високочастотних гармонік споживаного струму мережі
Номер патенту: 111076
Опубліковано: 25.10.2016
Автори: Кривошеєв Сергій Юрійович, Сокол Євген Іванович, Конопльов Ігор Анатолійович, Тимченко Микола Олександрович, Вержановська Марія Ростиславівна
Формула / Реферат
Спосіб ослаблення високочастотних гармонік струму, споживаного від напруги мережі при імпульсному навантаженні, при якому контролюють напругу та струм і використовують ці сигнали для формування сигналу керування корегуючим пристроєм об'єкта керування, а сигнал керування синхронізують з робочими інтервалами напруги мережі, який відрізняється тим, що безперервно контролюють співвідношення сигналів: інтегрованого квадрата добутку струму та напруги, що споживаються від мережі, і в яких блокована перша гармоніка, та інтегрованого квадрата добутку сигналів струму та напруги, що споживаються від мережі, це співвідношення сигналів використовують як контрольний сигнал зворотного зв'язку з об'єктом керування.
Текст
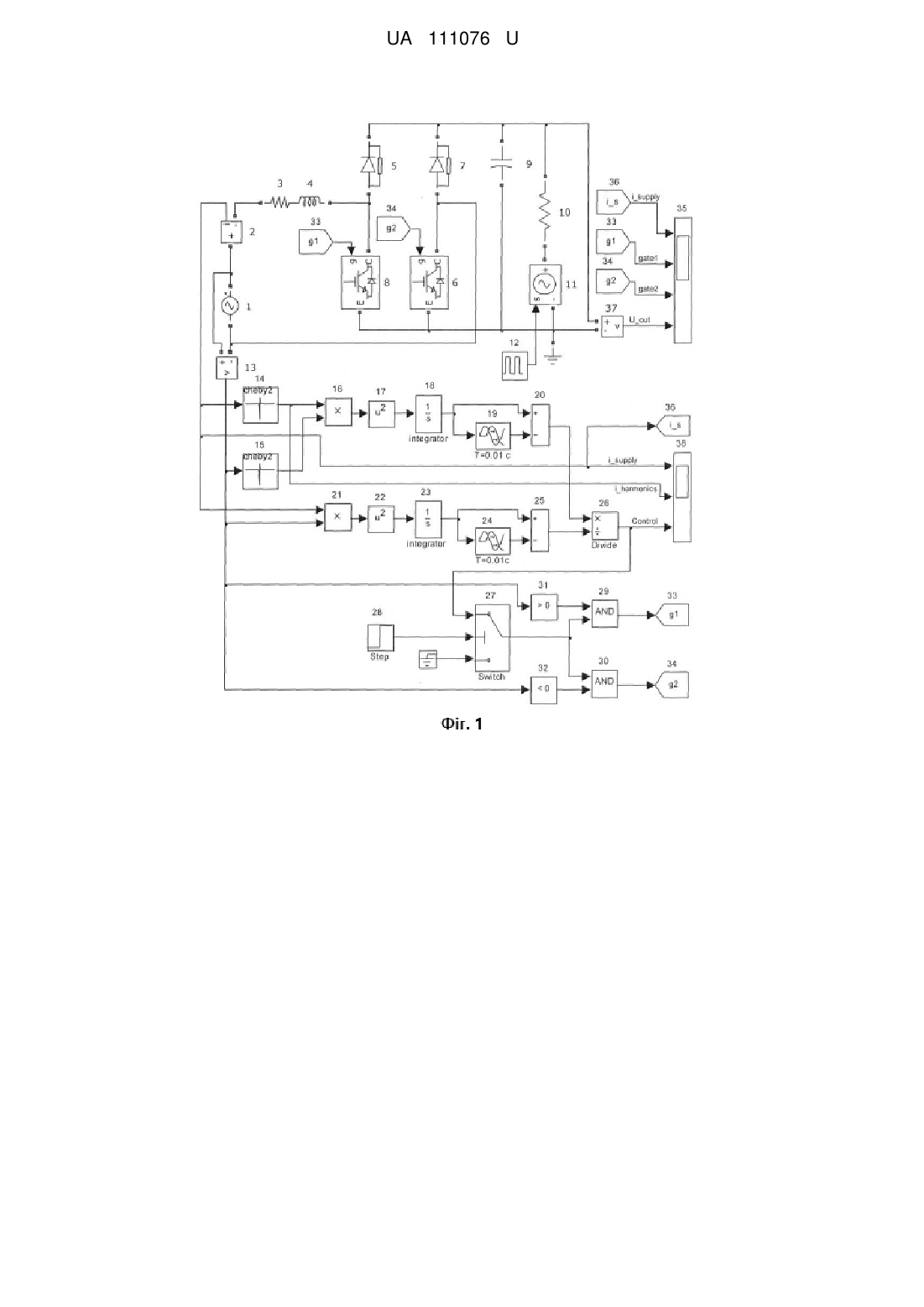
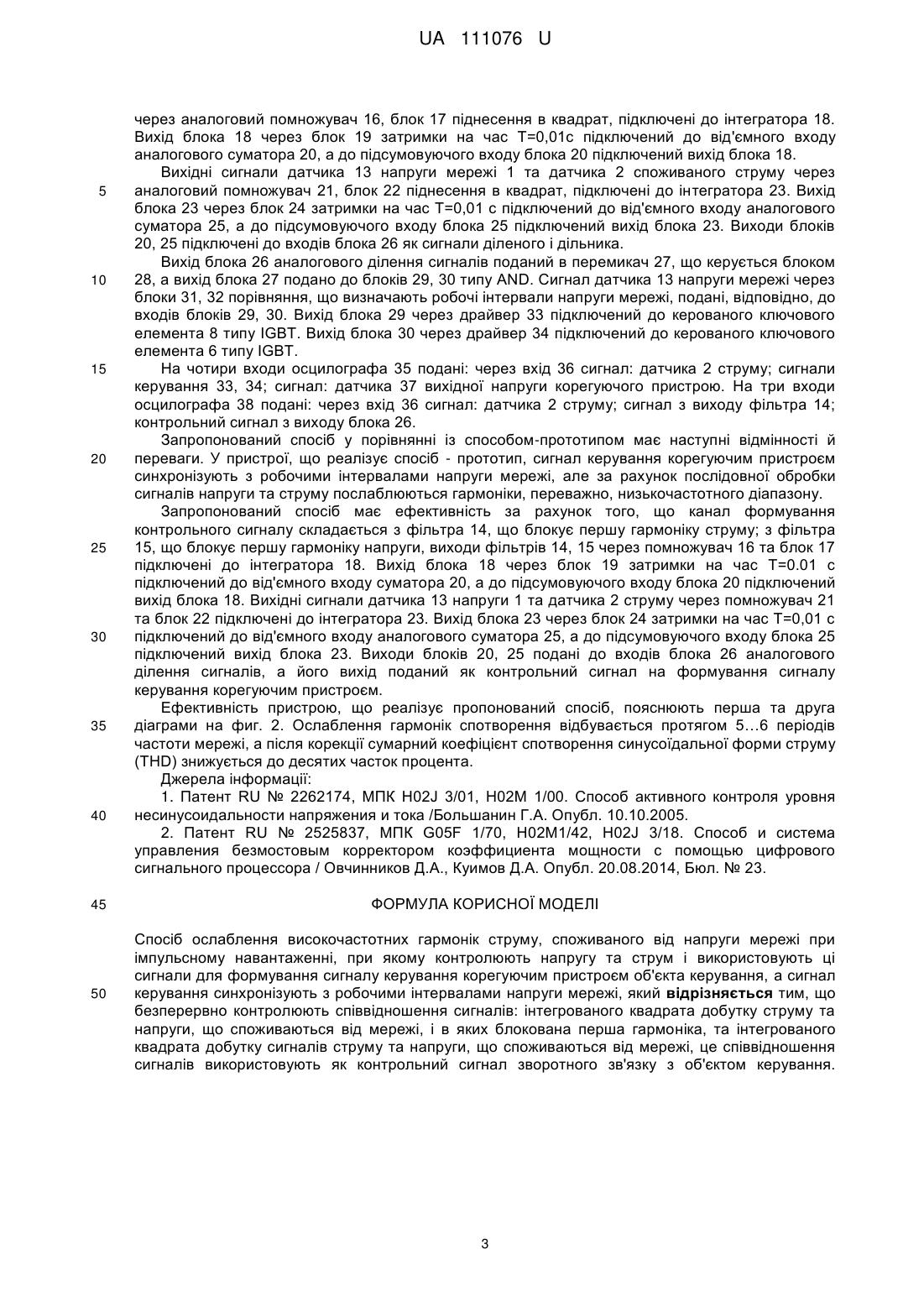
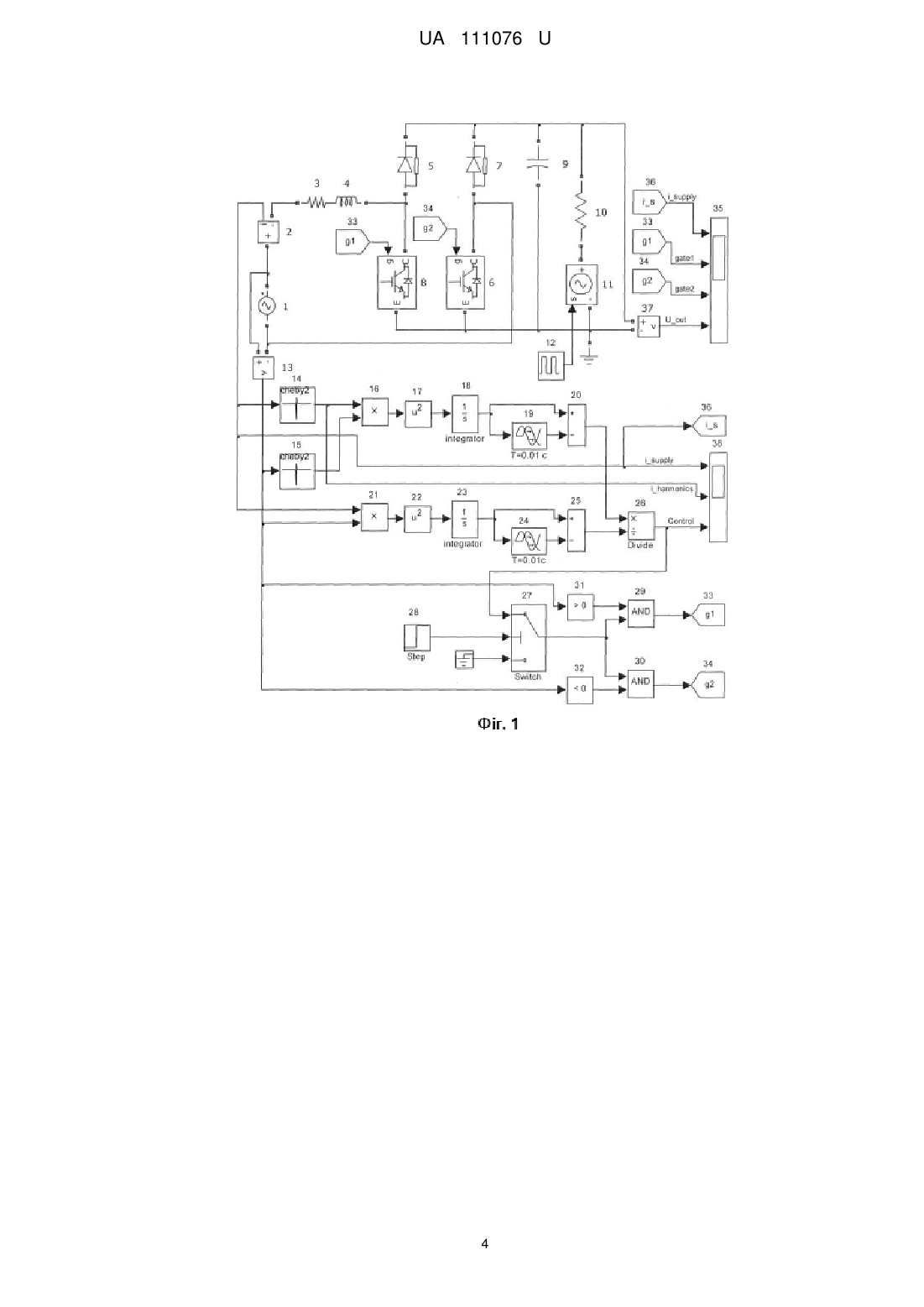
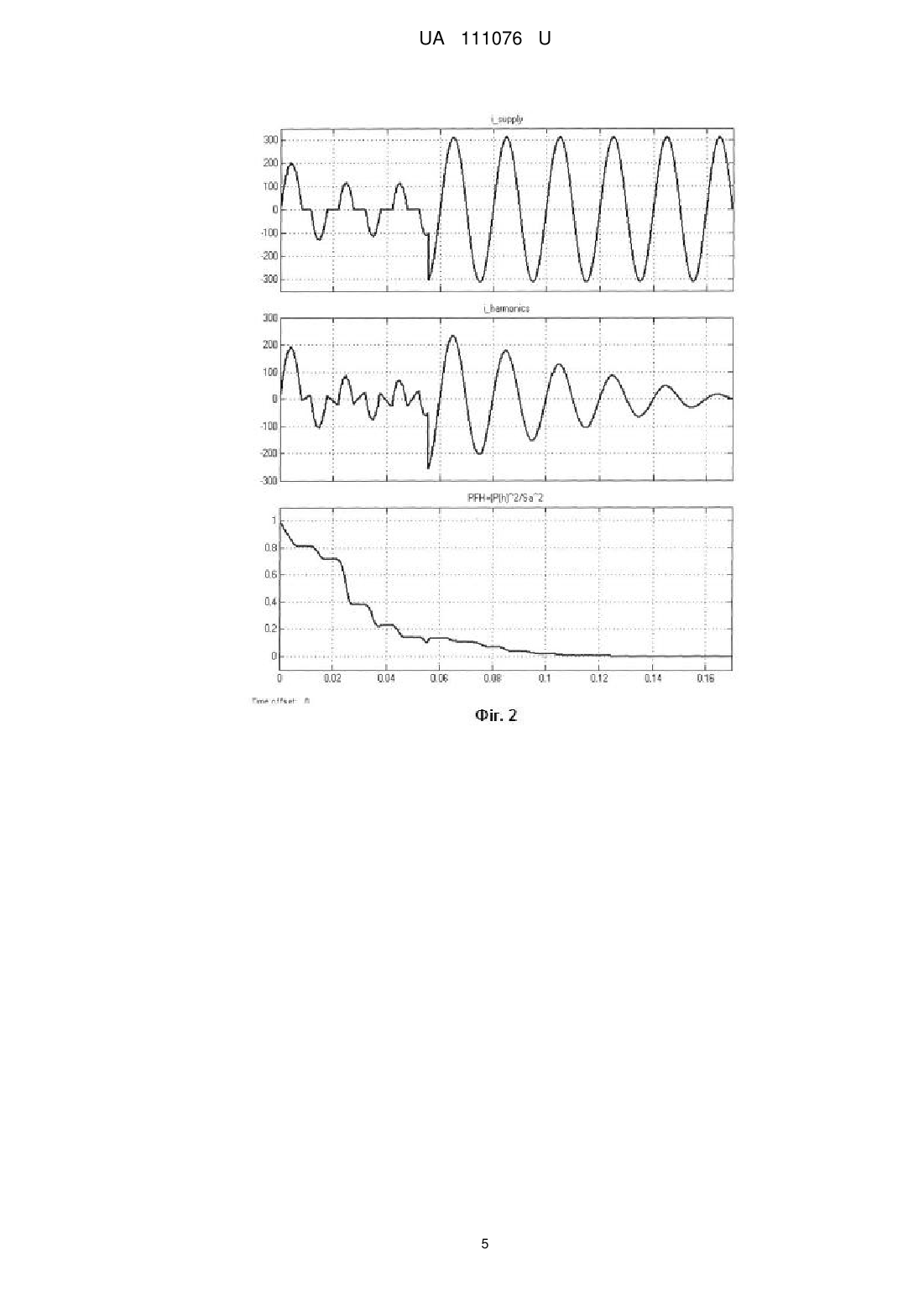
Реферат: Спосіб ослаблення високочастотних гармонік струму, споживаного від напруги мережі при імпульсному навантаженні, при якому контролюють напругу та струм і використовують ці сигнали для формування сигналу керування корегуючим пристроєм об'єкта керування, а сигнал керування синхронізують з робочими інтервалами напруги мережі. Крім цього, безперервно контролюють співвідношення сигналів: інтегрованого квадрата добутку струму та напруги, що споживаються від мережі, і в яких блокована перша гармоніка, та інтегрованого квадрата добутку сигналів струму та напруги, що споживаються від мережі, це співвідношення сигналів використовують як контрольний сигнал зворотного зв'язку з об'єктом керування. UA 111076 U (12) UA 111076 U UA 111076 U 5 10 15 20 25 30 35 40 Корисна модель належить до систем контролю та керування перетворювачами напруги мережі в змінну напругу підвищеної частоти і може бути використана для поліпшення електромагнітної сумісності перетворювачів, що містять нелінійні електричні навантаження. При цьому якість електроживлення забезпечується за рахунок ослаблення високочастотних гармонік струму, що спотворюють синусоїдальний струм частоти мережі. Аналогічний спосіб ослаблення гармонік споживаного струму мережі [1] передбачає контроль напруги та струму, а сигнал керування корегуючим пристроєм формується в моменти часу, коли обчислене значення коефіцієнта несинусоїдальності перевищує нормативний рівень. Недоліком цього аналогічного способу є відсутність синхронізації сигналу керування пристроєм, що корегує струм споживання від мережі, з робочими інтервалами напруги мережі. Відомий спосіб ослаблення гармонік споживаного струму мережі [2] передбачає контроль напруги та струму, а сигнал керування корегуючим пристроєм об'єкта керування синхронізують з робочими інтервалами напруги мережі. Цей спосіб є найбільш близьким до запропонованого по технічній суті і результату, що досягається, і тому обраний за найближчий аналог. Недоліками найближчого аналогічного способу є те, що сигнал керування корегуючим пристроєм формується послідовною обробкою, за визначеними критеріями, сигналів напруги та струму, що є співмножниками для визначення потужності. При цьому способі послаблюються гармоніки низькочастотного діапазону, але не враховуються високочастотні гармоніки, робочий напівперіод яких менше, ніж інтервал між моментами початку послідовної обробки сигналів напруги та струму (за теоремою Котельнікова-Шеннона). Тому точність корекції струму споживання при імпульсному навантаженні недостатня. В основі передбачуваної корисної моделі поставлене завдання - ослаблення високочастотних гармонік струму, споживаного від напруги мережі при імпульсному навантаженні, шляхом зниження сумарного коефіцієнта несинусоціальності струму. Це завдання виконується за рахунок того, що контролюють напругу та струм і використовують ці сигнали для формування сигналу керування корегуючим пристроєм об'єкта керування, а сигнал керування синхронізують з робочими інтервалами напруги мережі, що відрізняється тим, що безперервно контролюють співвідношення сигналів: інтегрованого квадрату добутку струму та напруги, що споживаються від мережі і в яких блокована перша гармоніка, та інтегрованого квадрату добутку сигналів струму та напруги, що споживаються від мережі, це співвідношення сигналів використовують як контрольний сигнал зворотного зв'язку з об'єктом керування. Сутність відмінних ознак даного способу від найближчого аналогічного способу полягає в тому, що сигнал керування корегуючим пристроєм об'єкта керування формують наступним чином. Сигнали, що отримані з датчика напруги us(t) і датчика споживаного струму мережі іs(t), несинусоїдальні та містять ряди гармонік струму і напруги. Сигнал, пропорційний квадрату добутку цих сигналів, має в своєму складі сигнал подвоєної частоти мережі з періодом повторення Т=0.01с та однополярну форму: S ( t ) ((uS ( t ) iS ( t ))2 0 . Якщо для перших гармонік напруги та струму сигналу S ( t ) виділити квадрат добутку діючих значень, то маємо співвідношення: n 0 lim n 45 50 (USk ISk )2 k 2 2 (US1 IS1 ) n (USk ISk ) 1 , (1) 2 k 2 де k - номера гармонік; n - число гармонік. Визначаємо діапазон значень співвідношення (1) - воно більше нуля, але менше одиниці для моментів часу, коли споживаний струм несинусоїдальний та містить гармоніки спотворення. Але якщо гармоніки спотворення послаблюються, то це співвідношення наближається до нуля. Безпосередня реалізація співвідношення (1) потребує повного гармонічного аналізу, що веде до зростання часу на обчислення, тому для наближеної реалізації переходимо до сигналу, що змінюється в часі: S ( t ) (uS ( t ) iS ( t ))2 , а при блокуванні сигналів перших гармонік напруги uS1( t ) , та струму iS1( t ) частоти 50 Гц маємо сигнал: 1 UA 111076 U SA ( t ) ((uS ( t ) uS1( t )) (iS ( t ) (iS1( t )))2 . Для реалізації сигналів S ( t ),SA ( t ) використаємо підсумовування складових функції до інтегрування функції: n Ньютона-Лейбніца від i1 перехід 0 f ( x i )x i f ( x )dx. n lim 5 10 Для безперервного контролю за співвідношенням (1) використовуємо інтегрування функції S ( t ) . Щоб визначити значення інтеграла в момент часу t>Т, то від поточного значення інтегратора віднімається збережена величина інтеграла за період T=0,01 с повторення функції S ( t ) : 1 t 1t 1T S ( t )dt S ( t )dt S ( t )dt. T t T T0 T0 Таким чином, щоб реалізувати співвідношення (1) для керування перетворювачем, використаємо наступний вираз: k( t ) 1 t 2 ((uS ( t ) u1( t )) (iS ( t ) i1( t ))) dt T t T 1 t 2 [uS ( t ) iS ( t )] dt T t T . 1 маємо контрольний сигнал зворотного зв'язку з об'єктом T керування, що подається в систему керування: При скороченні величини 15 t k( t ) 2 ((uS ( t ) u1( t )) (iS ( t ) i1( t ))) dt t T t . (2) 2 ((uS ( t ) iS ( t )) dt t T 20 25 30 35 40 45 Технічний результат зниження сумарного коефіцієнта несинусоїдальності струму, споживаного від мережі, досягається завдяки використанню властивості співвідношення (2). При будь-якому спотворенні синусоїдальної форми сигналу значення співвідношення (2) відхиляється від нуля до одиниці, тому формування корегуючого сигналу для послаблення гармонік несинусоїдального струму виконується по значенню співвідношення (2). У випадку, коли сигнал струму є синусоїдальним, співвідношення (2) дорівнює нулю незалежно від амплітуди та частоти сигналу, що контролюється. Таким чином, даний спосіб для контролю та корегування спотворення синусоїдального сигналу інваріантний до зміни моменту визначення амплітуди та фази першої гармоніки струму, що споживається перетворювачем напруги від мережі. Запропонований спосіб реалізований наступним чином. На фіг. 1 наведено функціональну схему, що реалізує запропонований спосіб ослаблення високочастотних гармонік споживаного струму мережі. На фіг. 2 наведені часові діаграми: споживаний струм мережі (перша діаграма), складові споживаного струму мережі, що містять спотворюючі гармоніки (друга діаграма) та контрольний сигнал, що представляє відношення (3) сигналів (третя діаграма). На фіг. 3 наведені часові діаграми: споживаний струм мережі (перша діаграма), сигнали керування ключами корегуючого пристрою (друга та третя діаграми) та вихідна напруга корегуючого пристрою (четверта діаграма). На діаграмах фіг. 2, 3 встановлено загальний час моделювання 0,17 с, а підключення корегуючого пристрою для ослаблення високочастотних гармонік споживаного струму встановлено через 0,055 с з початку моделювання. До змінної напруги живлення частоти мережі 1 (фіг. 1) через датчик 2 споживаного струму, резистор 3, індуктивність 4 підключені діагональні ключові елементи 5, 6, а також 7, 8 мостової схеми корегуючого пристрою. Вихід мостової схеми з однополярною напругою подано до конденсатора 9, до якого через резистор 10 підключений перетворювач напруги 11, що керується високочастотним генератором 12. Вихідні сигнали датчика 13 напруги мережі 1 та датчика 2 споживаного струму подані в канал формування контрольного сигналу, цей канал складається з фільтра 14, що блокує першу гармоніку струму, з фільтра 15, що блокує першу гармоніку напруги, виходи фільтрів 14, 15 2 UA 111076 U 5 10 15 20 25 30 35 40 45 50 через аналоговий помножувач 16, блок 17 піднесення в квадрат, підключені до інтегратора 18. Вихід блока 18 через блок 19 затримки на час T=0,01с підключений до від'ємного входу аналогового суматора 20, а до підсумовуючого входу блока 20 підключений вихід блока 18. Вихідні сигнали датчика 13 напруги мережі 1 та датчика 2 споживаного струму через аналоговий помножувач 21, блок 22 піднесення в квадрат, підключені до інтегратора 23. Вихід блока 23 через блок 24 затримки на час T=0,01 с підключений до від'ємного входу аналогового суматора 25, а до підсумовуючого входу блока 25 підключений вихід блока 23. Виходи блоків 20, 25 підключені до входів блока 26 як сигнали діленого і дільника. Вихід блока 26 аналогового ділення сигналів поданий в перемикач 27, що керується блоком 28, а вихід блока 27 подано до блоків 29, 30 типу AND. Сигнал датчика 13 напруги мережі через блоки 31, 32 порівняння, що визначають робочі інтервали напруги мережі, подані, відповідно, до входів блоків 29, 30. Вихід блока 29 через драйвер 33 підключений до керованого ключового елемента 8 типу IGBT. Вихід блока 30 через драйвер 34 підключений до керованого ключового елемента 6 типу IGBT. На чотири входи осцилографа 35 подані: через вхід 36 сигнал: датчика 2 струму; сигнали керування 33, 34; сигнал: датчика 37 вихідної напруги корегуючого пристрою. На три входи осцилографа 38 подані: через вхід 36 сигнал: датчика 2 струму; сигнал з виходу фільтра 14; контрольний сигнал з виходу блока 26. Запропонований спосіб у порівнянні із способом-прототипом має наступні відмінності й переваги. У пристрої, що реалізує спосіб - прототип, сигнал керування корегуючим пристроєм синхронізують з робочими інтервалами напруги мережі, але за рахунок послідовної обробки сигналів напруги та струму послаблюються гармоніки, переважно, низькочастотного діапазону. Запропонований спосіб має ефективність за рахунок того, що канал формування контрольного сигналу складається з фільтра 14, що блокує першу гармоніку струму; з фільтра 15, що блокує першу гармоніку напруги, виходи фільтрів 14, 15 через помножувач 16 та блок 17 підключені до інтегратора 18. Вихід блока 18 через блок 19 затримки на час T=0.01 с підключений до від'ємного входу суматора 20, а до підсумовуючого входу блока 20 підключений вихід блока 18. Вихідні сигнали датчика 13 напруги 1 та датчика 2 струму через помножувач 21 та блок 22 підключені до інтегратора 23. Вихід блока 23 через блок 24 затримки на час T=0,01 с підключений до від'ємного входу аналогового суматора 25, а до підсумовуючого входу блока 25 підключений вихід блока 23. Виходи блоків 20, 25 подані до входів блока 26 аналогового ділення сигналів, а його вихід поданий як контрольний сигнал на формування сигналу керування корегуючим пристроєм. Ефективність пристрою, що реалізує пропонований спосіб, пояснюють перша та друга діаграми на фиг. 2. Ослаблення гармонік спотворення відбувається протягом 5…6 періодів частоти мережі, а після корекції сумарний коефіцієнт спотворення синусоїдальної форми струму (THD) знижується до десятих часток процента. Джерела інформації: 1. Патент RU № 2262174, МПК H02J 3/01, Н02М 1/00. Способ активного контроля уровня несинусоидальности напряжения и тока /Большанин Г.А. Опубл. 10.10.2005. 2. Патент RU № 2525837, МПК G05F 1/70, Н02М1/42, H02J 3/18. Способ и система управления безмостовым корректором коэффициента мощности с помощью цифрового сигнального процессора / Овчинников Д.А., Куимов Д.А. Опубл. 20.08.2014, Бюл. № 23. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб ослаблення високочастотних гармонік струму, споживаного від напруги мережі при імпульсному навантаженні, при якому контролюють напругу та струм і використовують ці сигнали для формування сигналу керування корегуючим пристроєм об'єкта керування, а сигнал керування синхронізують з робочими інтервалами напруги мережі, який відрізняється тим, що безперервно контролюють співвідношення сигналів: інтегрованого квадрата добутку струму та напруги, що споживаються від мережі, і в яких блокована перша гармоніка, та інтегрованого квадрата добутку сигналів струму та напруги, що споживаються від мережі, це співвідношення сигналів використовують як контрольний сигнал зворотного зв'язку з об'єктом керування. 3 UA 111076 U 4 UA 111076 U 5 UA 111076 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: спосіб, високочастотних, споживаного, струму, ослаблення, гармонік, мережі
Код посилання
<a href="https://ua.patents.su/8-111076-sposib-oslablennya-visokochastotnikh-garmonik-spozhivanogo-strumu-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб ослаблення високочастотних гармонік споживаного струму мережі</a>
Спосіб перетворення змінної напруги в змінну напругу підвищеної частоти з ослабленням високочастотних гармонік споживаного струму
Номер патенту: 86511
Опубліковано: 10.01.2014
Автори: Сокол Євген Іванович, Кривошеєв Сергій Юрійович, Конопльов Ігор Анатолійович, Вержановська Марія Ростиславівна, Тимченко Микола Олександрович
Мітки: частоти, гармонік, напругу, ослабленням, змінної, споживаного, струму, змінну, перетворення, спосіб, напруги, підвищеної, високочастотних
Формула / Реферат:
Спосіб перетворення змінної напруги в змінну напругу підвищеної частоти з ослабленням високочастотних гармонік споживаного струму, при якому контролюють значення вхідного струму і вхідної напруги перетворювача, синхронізують контрольовані значення з напругою мережі, формують нормуючі значення для контрольованих значень вхідного струму і вхідної напруги, визначають фазовий зсув між вхідним струмом і вхідною напругою, через індуктивний зв'язок...
Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі
Номер патенту: 79554
Опубліковано: 25.06.2007
Автори: Кашкалов Володимир Іванович, Коровін Сергій Леонідович
МПК: H02J 1/02, H03H 11/00, H03H 7/00
Мітки: компенсації, активний, вищих, електричної, напруги, мережі, струму, фільтр, гармонік
Формула / Реферат:
1. Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі, який містить блок аналізу і вимірювання вищих гармонік, блок генерації протигармонік і силовий блок для передачі генерованих гармонік в електричну мережу, який відрізняється тим, що як силовий блок використана синхронна електрична машина, блок генерації протигармонік виконаний у вигляді додаткового малопотужного збудника, вхід якого з'єднаний з виходом...
Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі
Номер патенту: 82746
Опубліковано: 12.05.2008
Автори: Кашкалов Володимир Іванович, Жежеленко Ігор Володимирович, Коровін Сергій Леонідович, Саєнко Юрій Леонідович
МПК: H03H 7/00, H02J 1/02, H03H 11/00
Мітки: активний, гармонік, компенсації, струму, напруги, фільтр, вищих, електричної, мережі
Формула / Реферат:
1. Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі, який містить блок аналізу і вимірювання вищих гармонік, вихід якого з'єднаний з входом блока генерації протифазних вищих гармонік, вихід останнього з'єднано із входом силового блока, вихід якого призначений для включення в мережу, який відрізняється тим, що додатково містить блок задання напруги, блок трансформаторів струму статора і блок трансформаторів...
Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі
Номер патенту: 19481
Опубліковано: 15.12.2006
Автори: Жежеленко Ігор Володимирович, Кашкалов Володимир Іванович, Коровін Сергій Леонідович, Саєнко Юрій Леонідович
МПК: H03H 7/00, H02J 1/02, H03H 11/00
Мітки: гармонік, компенсації, напруги, активний, фільтр, електричної, вищих, мережі, струму
Формула / Реферат:
1. Активний фільтр для компенсації вищих гармонік напруги та струму електричної мережі, який містить блок аналізу і вимірювання вищих гармонік, з'єднаний з входом блока генерації протигармонік, вихід якого з'єднано із силовим блоком, з виходом, призначеним для вмикання в мережу, який відрізняється тим, що він додатково містить блок задання напруги, блок трансформаторів струму статора і блок трансформаторів струму ротора, блок трансформаторів...
Спосіб моніторингу вищих гармонік у розподільчій електричній мережі
Номер патенту: 35180
Опубліковано: 10.09.2008
Автори: Наконечний Тарас Ігорович, Варецький Юрій Омелянович
МПК: G01R 23/16
Мітки: спосіб, моніторингу, вищих, електричний, мережі, гармонік, розподільчий
Формула / Реферат:
Спосіб моніторингу вищих гармонік у розподільчій електричній мережі, що полягає у вимірюванні миттєвих значень напруги і струму, у визначенні їх гармонічного складу на основі розкладу у ряд Фур'є та у визначенні коефіцієнтів скривлення напруги і струму з використанням одного стаціонарного вимірного пристрою гармонік, який відрізняється тим, що додатково вимірюють на шинах інших підстанцій електричної мережі електричні величини, такі як...
Попередній патент: Куля
Наступний патент: Спосіб експрес-ідентифікації водних розчинів середньої та високої мінералізації
Випадковий патент: Лікувальний препарат "теофедрин - нео"