Спосіб визначення положення ступеневого перемикача
Номер патенту: 113003
Опубліковано: 25.11.2016
Автори: Шмід Себастіан, Плітцко Домінік, Бірінгер Альфред
Формула / Реферат
1. Спосіб визначення положення оснащеного моторним приводом силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора,
який відрізняється тим, що включає стадії:
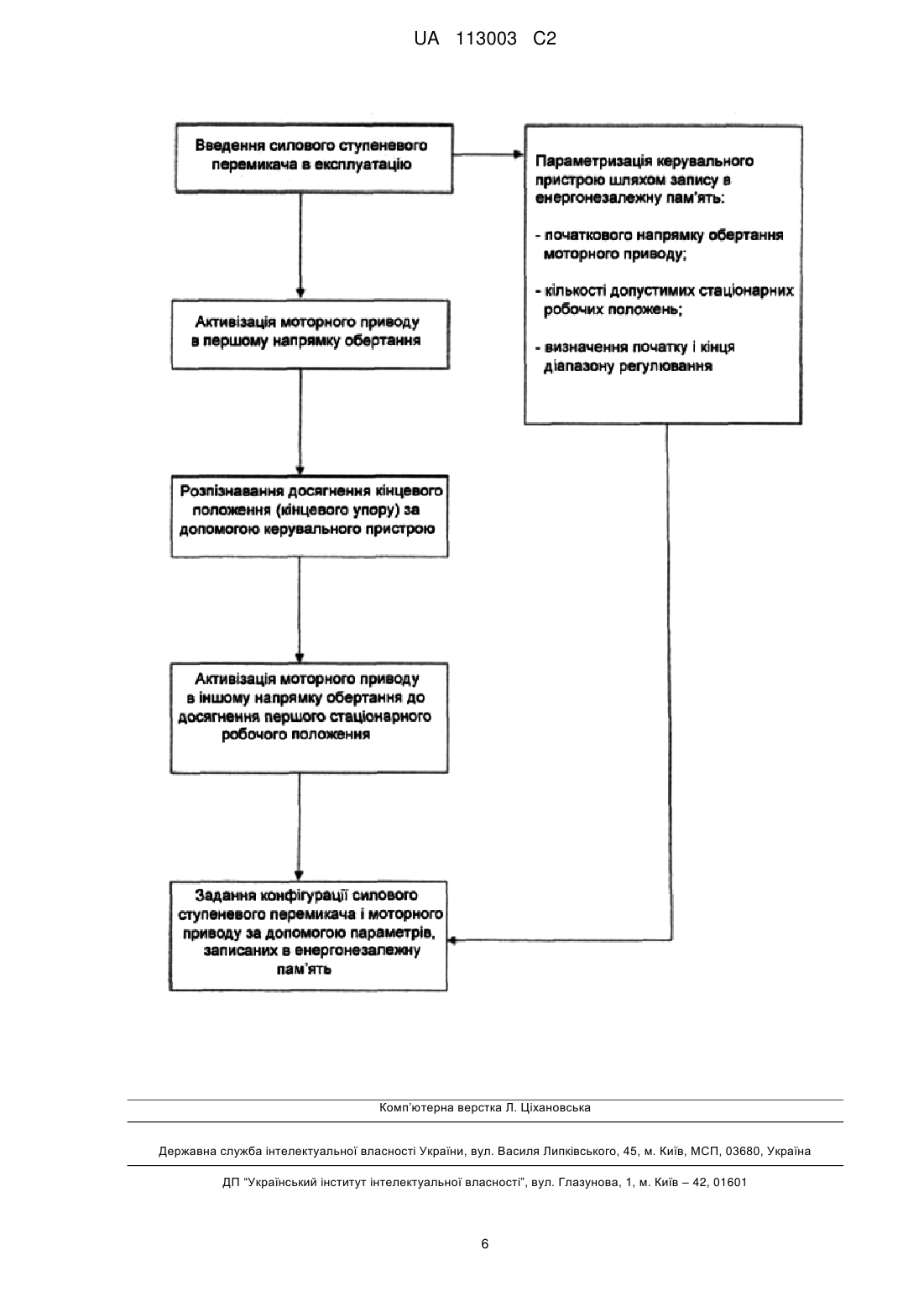
- після введення силового ступеневого перемикача в експлуатацію моторний привід активізують у першому напрямку обертання за допомогою параметризованого керувального пристрою, причому починають перемикання силового ступеневого перемикача в його стаціонарні робочі положення, тобто підключення різних відводів обмотки ступеневого трансформатора, в напрямку першого відводу обмотки,
- за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача,
- активізують моторний привід в іншому напрямку обертання, причому перемикання силового ступеневого перемикача здійснюють у межах діапазону регулювання в протилежному напрямку до досягнення першого стаціонарного робочого положення,
- потім визначають конфігурацію першого стаціонарного робочого положення як попередньо визначеного робочого положення шляхом запису параметрів керувального пристрою в енергонезалежну пам'ять.
2. Спосіб за п. 1, який відрізняється тим, що
за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача шляхом запису в енергонезалежну пам'ять сили струму моторного приводу після його активізації в першому напрямку обертання,
а через визначені проміжки часу, ці записані в енергонезалежну пам'ять значення сили струму, порівнюють із максимально допустимим значенням, встановленим у керувальному пристрої як порогове значення струму,
при перевищенні попередньо встановленого заданого значення сили струму генерують електричний сигнал, причому керувальний пристрій сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача.
3. Спосіб за п. 1, який відрізняється тим, що
за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача шляхом вимірювання датчиком швидкості обертання привідного вала моторного приводу через рівномірні проміжки часу,
при досягненні значення виміряної швидкості обертання, яке дорівнює нулю, генерують електричний сигнал за допомогою керувального пристрою, який сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача.
4. Спосіб за п. 1, який відрізняється тим, що
за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача, причому при перемиканні силового ступеневого перемикача в рамках діапазону регулювання в першому напрямку обертання при досягненні кожного наступного стаціонарного робочого положення підключають один сигнальний контакт,
а момент часу спрацьовування, тобто підключення сигнального контакту, записують в енергонезалежну пам'ять за допомогою керувального пристрою,
проміжок між двома моментами часу спрацьовування порівнюють із максимально допустимим пороговим значенням,
і при перевищенні максимально допустимого порогового значення генерують електричний сигнал, причому керувальний пристрій сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача.
Текст
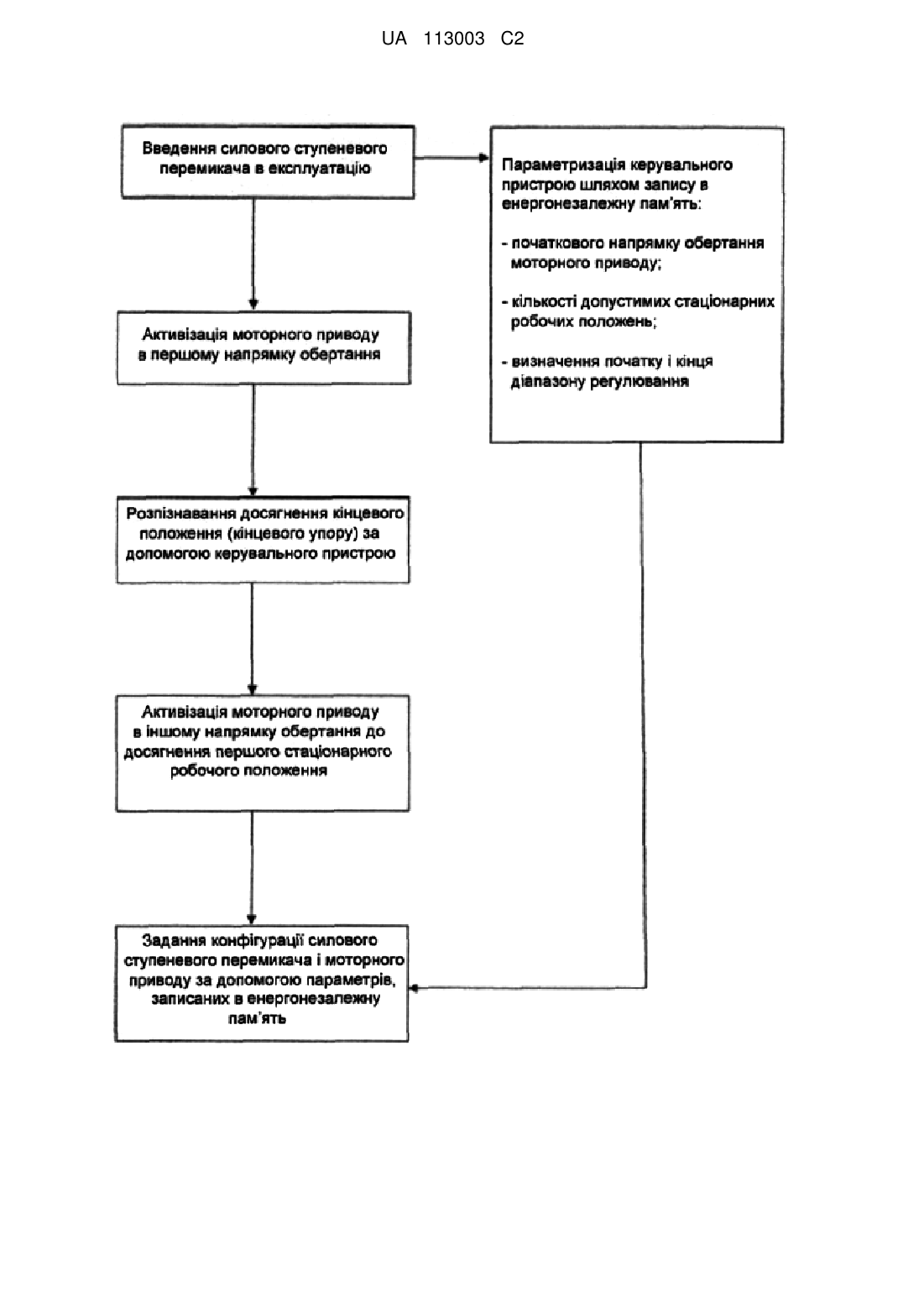
Реферат: Винахід стосується способу визначення положення силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора. Загальна винахідницька ідея полягає в досягненні попередньо визначеного робочого положення силового ступеневого перемикача шляхом активізації моторного приводу в першому напрямку обертання після введення в експлуатацію силового ступеневого перемикача за допомогою параметризованого керувального пристрою, причому здійснюють перемикання силового ступеневого перемикача в його стаціонарні робочі положення, тобто починають підключення різних відводів обмотки силового ступеневого перемикача в напрямку першого відводу обмотки, причому за допомогою керувального пристрою розпізнають досягнення кінцевого положення силового ступеневого перемикача, причому після цього активізують моторний привід в іншому напрямку, причому здійснюють перемикання силового ступеневого перемикача в межах діапазону регулювання в протилежному напрямку до досягнення першого стаціонарного робочого положення, і причому після цього визначають конфігурацію першого стаціонарного робочого положення як попередньо визначеного робочого положення на підставі параметрів керувального пристрою, записаних у енергонезалежну пам'ять. UA 113003 C2 (12) UA 113003 C2 UA 113003 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується способу визначення положення силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора. Протягом багатьох років силові ступеневі перемикачі широко застосовують у всьому світі для безрозривного перемикання різних відводів обмотки ступеневих трансформаторів. Так звані реакторні перемикачі, особливо широко застосовувані в Північній Америці, містять реактивний перемикальний елемент, який забезпечує можливість повільного безрозривного перемикання. Силові ступеневі перемикачі, що діють за принципом швидкодіючих резисторних перемикачів, зазвичай містять селектор для електроенергонезалежного вибору відповідного відводу обмотки ступеневого трансформатора, на який має бути здійснене перемикання, та силовий перемикач для перемикання з попереднього на новий, попередньо вибраний відвід обмотки. Для цього у силовому перемикачі зазвичай передбачені перемикальні контакти і резисторні контакти. Перемикальні контакти при цьому використовують для прямого з'єднання відповідного відводу обмотки з силовим відводом, а резисторні контакти - для короткочасного підключення, тобто шунтування за допомогою одного або кількох перехідних резисторів. Проте, наукові розробки протягом останніх років не передбачають застосування силових перемикачів із механічними перемикальними контактами в ізолювальному маслі. Замість цього як перемикальні елементи все частіше застосовують вакуумні перемикальні елементи. Подібний силовий ступеневий перемикач із вакуумними перемикальними елементами відомий, наприклад, із публікації DE 10 2009 043 171 А1. Цей силовий перемикач містить виконаний з можливістю приведення в дію енергоакумулятором привідний вал із розміщеним на ньому принаймні одним кулачковим диском. На кулачковому диску передбачено кілька керуючих профілів, причому два виконаних на торці кулачкового диска керуючих профілі мають відмінний від кола контур у формі кулачків, по кожному з яких із контактним замиканням напрямляють сполучений перекидним важелем із вакуумним перемикальним елементом ролик, що переміщують вздовж контуру відповідного керуючого профілю. Зазвичай відомі з рівня техніки силові ступеневі перемикачі відправляють замовнику в формі готових змонтованих виробів, які він вбудовує в існуючий ступеневий трансформатор безпосередньо на місці застосування. Для цього виробник додає інструкцію з експлуатації, що містить легкозрозумілі вказівки щодо монтажу та відповідну документацію. Введення в експлуатацію, тобто приєднання ступеневого регулювального пристрою разом із моторним приводом до ступеневого трансформатора і його електронного блоку керування на окремих стадіях монтажу вимагає керованого вручну підключення різних ступенів регулювальної обмотки ступеневого трансформатора, причому здійснюють перемикання ступеневого регулювального пристрою між сусідніми нерухомими контактами, електрично сполученими з регулювальною обмоткою. Цей процес згідно з рівнем техніки потребує великих витрат часу та іноді призводить до несправностей. У публікації DE 197 05 576 А1 описаний пристрій позиційної сигналізації для силових ступеневих перемикачів. Пристрої позиційної сигналізації як компонент моторного приводу ступеневих перемикачів тощо призначені для реєстрації поточного положення ступеневого перемикача тощо і передачі отриманих даних електричними методами; це, в свою чергу, з однієї сторони є відправним пунктом для індикації положення, а з іншої сторони - забезпечує можливість використання дійсних значень як основи для виконання наступних функцій керування і регулювання. Відомі пристрої позиційної сигналізації для ступеневих перемикачів містять множину сигнальних контактів, розташованих у формі кола, причому кожному сигнальному контакту відповідає конкретне робоче положення ступеневого перемикача. При цьому підключення сигнальних контактів здійснюють за допомогою обертового центрального сигнального контактного важеля, який сполучений зі ступеневим перемикачем, точніше кажучи - з моторним приводом ступеневого перемикача. При кожній зміні робочого положення ступеневого перемикача, тобто при перемиканні з поточного відводу обмотки на наступний відвід обмотки, сигнальний контактний важіль переміщується лише на невеликий кут перемикання, який відповідає відстані між двома сусідніми сигнальними контактами. Проте, внаслідок безперервного переміщення сигнального контактного важеля розімкнення контактів відбувається дуже повільно і може тривати кілька секунд залежно від конкретного процесу перемикання. Отже, такий пристрій позиційної сигналізації не є придатним до застосування в тому випадку, якщо сигнальні контакти включені в ланцюги струму, по яких напрямляють постійний струм, або якщо взагалі необхідно перемикати великі електричні струми. Таким чином, у цих відомих із рівня техніки пристроях позиційної сигналізації кожному сигнальному контакту відповідає стаціонарне робоче положення ступеневого перемикача, тобто відвід регулювальної обмотки ступеневого трансформатора. При цьому механічне з'єднання та 1 UA 113003 C2 5 10 15 20 25 30 35 40 45 50 55 60 регулювання ступеневого перемикача з індикацією позиційної сигналізації також необхідно здійснювати згідно з чітко визначеною схемою перемикання, оскільки в іншому випадку пристрій позиційної сигналізації не відображатиме дійсні робочі положення. Тому задачею винаходу є розроблення способу визначення положення силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора, який без ручного керування підключенням різних ступенів регулювальної обмотки забезпечує можливість регулювання попередньо визначеного робочого положення силового ступеневого перемикача. Цю задачу вирішено в способі визначення положення силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора ознаками першого пункту формули винаходу. Залежні пункти формули винаходу при цьому стосуються особливо переважних вдосконалених форм виконання винаходу. Під визначенням положення в рамках цього винаходу слід розуміти досягнення попередньо заданого робочого положення силового ступеневого перемикача. Загальна винахідницька ідея полягає в досягненні попередньо визначеного робочого положення силового ступеневого перемикача шляхом активізації моторного приводу в першому напрямку обертання після введення силового ступеневого перемикача в експлуатацію за допомогою параметризованого керувального пристрою, причому починають послідовне перемикання силового ступеневого перемикача в його стаціонарні робочі положення, тобто підключення різних відводів обмотки ступеневого трансформатора, в напрямку першого відводу обмотки, причому досягнення кінцевого положення силового ступеневого перемикача розпізнають за допомогою керувального пристрою, після чого моторний привід активізують в іншому напрямку обертання, після чого перемикають силовий ступеневий перемикач в межах усього діапазону регулювання в протилежному напрямку до досягнення першого стаціонарного робочого положення, і причому перше стаціонарне робоче положення конфігурують як попередньо визначене робоче положення за допомогою записаних в енергонезалежну пам'ять параметрів керувального пристрою. Таким чином, відповідний винаходові спосіб після введення силового ступеневого перемикача в експлуатацію незалежно визначає перше стаціонарне робоче положення як вихідний параметр для всіх наступних операцій з перемикання. Оскільки це визначене робоче положення за допомогою програмного забезпечення записане в енергонезалежну пам'ять, згодом у будь-який момент часу можна відтворити кількість і напрямок здійснених перемикань силового ступеневого перемикача, і, таким чином, насамкінець, поточне стаціонарне робоче положення силового ступеневого перемикача. Іншими словами, згідно з суттю винаходу передбачене механічне обмеження діапазону регулювання силового ступеневого перемикача для забезпечення можливості нормування відносно визначеного стаціонарного робочого положення силового ступеневого перемикача. Згідно з особливою вдосконаленою формою виконання винаходу керувальний пристрій розпізнає механічний кінцевий упор, що обмежує діапазон регулювання силового ступеневого перемикача, шляхом запису сили струму моторного приводу після його активізації в першому напрямку обертання в енергонезалежну пам'ять і порівняння записаного значення через визначені проміжки часу із встановленим у керувальному пристрої максимально допустимим пороговим значенням струму. При перевищенні певного заданого значення поточного струму генерують електричний сигнал, який вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Згідно з іншою формою виконання винаходу для виявлення досягнення механічного кінцевого упору, який обмежує діапазон регулювання силового ступеневого перемикача, використовують керувальний пристрій, причому за допомогою датчика через рівномірні проміжки часу визначають швидкість обертання привідного вала моторного приводу. Якщо визначена швидкість обертання дорівнює нулю, генерують електричний сигнал, який вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Згідно з іншою формою виконання винаходу при перемиканні силового ступеневого перемикача в межах діапазону регулювання в першому напрямку обертання при досягненні кожного наступного стаціонарного робочого положення підключають один сигнальний контакт, причому момент часу спрацьовування, тобто підключення сигнального контакту, записують в енергонезалежну пам'ять за допомогою керувального пристрою, і причому проміжок між двома моментами часу спрацьовування порівнюють із максимально допустимим пороговим значенням, і причому при перевищенні максимально допустимого порогового значення генерують електричний сигнал, який вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Це може бути здійснене, наприклад, таким чином, що привідний вал моторного приводу передає обертальний рух шляхом введення в 2 UA 113003 C2 5 10 15 20 25 30 35 40 45 50 55 60 зачеплення принаймні на один кулачковий диск, який, у свою чергу, приводить у дію принаймні один мікроперемикач при здійсненні кожного оберту кулачкового диска. Залежно від передаточного числа обертання кулачкового диска може відбуватися синхронно з перемиканням силового перемикача з першого у сусіднє друге стаціонарне робоче положення. Таким чином, мікроперемикач спрацьовує один раз при здійсненні кожного оберту кулачкового диска, отже, при кожному перемиканні, тобто при досягненні допустимого стаціонарного робочого положення силового ступеневого перемикача, і таким чином сигналізує про успішне завершення процесу перемикання. Відповідний винаходові спосіб далі пояснюється докладніше на прикладі за допомогою креслення. На кресленні наведена схема здійснення відповідного винаходові способу. Вихідним пунктом відповідного винаходові способу є введення силового ступеневого перемикача зі ступеневим трансформатором в експлуатацію. При введенні в експлуатацію з'єднувальні контакти силового ступеневого перемикача підключають до регулювальної обмотки ступеневого трансформатора, монтують моторний привід, і силовий ступеневий перемикач разом із моторним приводом приєднують до підтримуваного програмним забезпеченням керувального пристрою, який, в свою чергу, може бути приєднаний до вивідного пристрою. Керувальний пристрій слід параметризувати при введенні в експлуатацію, зокрема, при цьому необхідно визначити початковий напрямок переміщення привідного вала моторного приводу; також слід вказати кількість допустимих стаціонарних робочих положень силового ступеневого перемикача і, насамкінець, визначити початок діапазону регулювання, тобто перше допустиме стаціонарне робоче положення, і кінець діапазону регулювання, тобто останнє допустиме робоче положення силового ступеневого перемикача. Ці параметри мають бути записані в енергонезалежну пам'ять керувального пристрою. Як описано вище, силові ступеневі перемикачі зазвичай містять селектор для електроенергонезалежного вибору відповідного відводу обмотки ступеневого перемикача, на який має бути здійснене перемикання, і силовий перемикач для перемикання з поточного на новий, попередньо вибраний відвід обмотки. Залежно від типу перемикача, покладеного в основу силового ступеневого перемикача, при регулювальній обмотці, наприклад із п'ятьма відводами, допустимими є п'ять стаціонарних робочих положень, якщо в основу покладений принцип швидкодіючого резисторного перемикача, і дев'ять стаціонарних робочих положень, якщо в основу покладений принцип реакторного перемикача, оскільки при цьому є допустимим використання середніх положень як стаціонарних робочих положень. Після цього моторний привід за допомогою параметризованого керувального пристрою активізують для приведення в дію в першому напрямку обертання, що спричиняє перемикання силового ступеневого перемикача в його стаціонарні робочі положення, тобто підключення різних витків обмотки ступеневого трансформатора, в напрямку першого відводу обмотки. Першим відводом обмотки в даному випадку є найближчий до основної обмотки ступеневого перемикача відвід регулювальної обмотки, тобто початок діапазону регулювання ступеневого трансформатора. Моторним приводом є, наприклад, відомий із рівня техніки кроковий двигун. На наступній стадії способу досягнення кінцевого положення розпізнають за допомогою керувального пристрою. Кінцевим положенням у рамках даного винаходу є механічний кінцевий упор силового ступеневого перемикача, до якого переміщується рухома частина силового ступеневого перемикача при досягненні початку чи кінця його діапазону регулювання. Це може відбуватися, наприклад, таким чином, що керувальний пристрій розпізнає механічний кінцевий упор діапазону регулювання силового ступеневого перемикача, причому силу струму моторного приводу після його активізації в першому напрямку обертання записують в енергонезалежну пам'ять і через рівномірні проміжки часу порівнюють із максимально допустимим значенням, яке параметризоване в керувальному пристрої як порогове значення струму. Якщо поточне значення струму перевищує певне задане значення, генерують електричний сигнал, який вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Альтернативно передбачена також можливість виявлення механічного кінцевого упору діапазону регулювання силового ступеневого перемикача за допомогою керувального пристрою, якщо датчик через рівномірні проміжки часу не виявляє обертання привідного вала моторного приводу. Якщо виміряна швидкість обертання дорівнює нулю, генерують електричний сигнал, який вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Згідно з іншою формою виконання винаходу при перемиканні силового ступеневого перемикача в межах діапазону регулювання в першому напрямку обертання при досягненні кожного найближчого стаціонарного робочого положення підключають один сигнальний контакт, 3 UA 113003 C2 5 10 15 20 25 30 причому момент часу спрацьовування, тобто підключення сигнального контакту, за допомогою керувального пристрою записують в енергонезалежну пам'ять, причому проміжок часу між двома моментами часу спрацьовування порівнюють із максимально допустимим пороговим значенням, причому при перевищенні максимально допустимого порогового значення генерують електричний сигнал, що вказує керувальному пристрою на досягнення механічного кінцевого упору силового ступеневого перемикача. Це може бути здійснене, наприклад, таким чином, що за допомогою привідного вала моторного приводу обертальний рух передають шляхом введення в зачеплення принаймні на один кулачковий диск, який, в свою чергу, приводить у дію принаймні один мікроперемикач при кожному оберті кулачкового диска. Залежно від передаточного числа обертання кулачкового диску може бути синхронізоване з перемиканням силового перемикача із першого в сусіднє друге стаціонарне робоче положення. Отже, мікроперемикач спрацьовує один раз при кожному оберті кулачкового диска, і, таким чином, при кожному перемиканні, тобто при допустимому стаціонарному робочому положенні силового ступеневого перемикача, і таким чином сигналізує про успішне завершення процесу перемикання. На наступній стадії способу моторний привід активізують за допомогою керувального пристрою в іншому напрямку обертання, після чого здійснюють перемикання селектора в межах діапазону регулювання в протилежному напрямку до досягнення першого стаціонарного робочого положення і припиняють перемикання при досягненні першого стаціонарного робочого положення. Насамкінець визначають конфігурацію першого стаціонарного робочого положення як попередньо визначеного робочого положення за допомогою записаних в енергонезалежну пам'ять параметрів керувального пристрою. Таким чином, відповідний винаходові спосіб після введення силового ступеневого перемикача в експлуатацію незалежно визначає перше стаціонарне робоче положення як вихідне значення для всіх наступних операцій перемикання. Оскільки це визначене робоче положення за допомогою програмного забезпечення записують в енергонезалежну пам'ять, в будь-який наступний момент часу забезпечується можливість відтворення кількості та напрямку перемикань силового ступеневого перемикача і, насамкінець, поточного стаціонарного робочого положення силового ступеневого перемикача. Іншими словами, згідно з суттю винаходу механічне обмеження діапазону регулювання силового ступеневого перемикача застосовують для забезпечення можливості наступного нормування відносно визначеного стаціонарного робочого положення силового ступеневого перемикача. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Спосіб визначення положення оснащеного моторним приводом силового ступеневого перемикача для перемикання різних відводів обмотки ступеневого трансформатора, який відрізняється тим, що включає стадії: - після введення силового ступеневого перемикача в експлуатацію моторний привід активізують у першому напрямку обертання за допомогою параметризованого керувального пристрою, причому починають перемикання силового ступеневого перемикача в його стаціонарні робочі положення, тобто підключення різних відводів обмотки ступеневого трансформатора, в напрямку першого відводу обмотки, - за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача, - активізують моторний привід в іншому напрямку обертання, причому перемикання силового ступеневого перемикача здійснюють у межах діапазону регулювання в протилежному напрямку до досягнення першого стаціонарного робочого положення, - потім визначають конфігурацію першого стаціонарного робочого положення як попередньо визначеного робочого положення шляхом запису параметрів керувального пристрою в енергонезалежну пам'ять. 2. Спосіб за п. 1, який відрізняється тим, що за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача шляхом запису в енергонезалежну пам'ять сили струму моторного приводу після його активізації в першому напрямку обертання, а через визначені проміжки часу, ці записані в енергонезалежну пам'ять значення сили струму, порівнюють із максимально допустимим значенням, встановленим у керувальному пристрої як порогове значення струму, 4 UA 113003 C2 5 10 15 20 при перевищенні попередньо встановленого заданого значення сили струму генерують електричний сигнал, причому керувальний пристрій сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача. 3. Спосіб за п. 1, який відрізняється тим, що за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача шляхом вимірювання датчиком швидкості обертання привідного вала моторного приводу через рівномірні проміжки часу, при досягненні значення виміряної швидкості обертання, яке дорівнює нулю, генерують електричний сигнал за допомогою керувального пристрою, який сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача. 4. Спосіб за п. 1, який відрізняється тим, що за допомогою керувального пристрою виявляють досягнення кінцевого положення силового ступеневого перемикача, причому при перемиканні силового ступеневого перемикача в рамках діапазону регулювання в першому напрямку обертання при досягненні кожного наступного стаціонарного робочого положення підключають один сигнальний контакт, а момент часу спрацьовування, тобто підключення сигнального контакту, записують в енергонезалежну пам'ять за допомогою керувального пристрою, проміжок між двома моментами часу спрацьовування порівнюють із максимально допустимим пороговим значенням, і при перевищенні максимально допустимого порогового значення генерують електричний сигнал, причому керувальний пристрій сигналізує про досягнення механічного кінцевого упору силового ступеневого перемикача. 5 UA 113003 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for averaging the voltage in an on-load tap changer
Автори англійськоюBieringer, Alfred, Plitzko, Dominik, Schmid, Sebastian
Автори російськоюБирингер Альфред, Плитцко Доминик, Шмид Себастиан
МПК / Мітки
МПК: H01H 9/00
Мітки: спосіб, положення, перемикача, ступеневого, визначення
Код посилання
<a href="https://ua.patents.su/8-113003-sposib-viznachennya-polozhennya-stupenevogo-peremikacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення положення ступеневого перемикача</a>
Спосіб контролю функціонування ступеневого перемикача
Номер патенту: 112888
Опубліковано: 10.11.2016
Автори: Хохмут Харальд, Плітцко Домінік, Бірінгер Альфред, Шмід Себастіан
МПК: H01H 9/00
Мітки: спосіб, контролю, перемикача, функціонування, ступеневого
Формула / Реферат:
1. Спосіб контролю функціонування ступеневого перемикача, що приводиться в дію моторним приводом, для безрозривного перемикання відводів обмотки ступеневого трансформатора, який відрізняється тим, що включає наведені нижче стадії:після одержання виконавчої команди на перемикання навантаження (з відводу n на відвід n+1) здійснюють короткочасну активізацію моторного приводу разом зі ступеневим перемикачем, причому при належному...
Спосіб контролю ступеневого перемикача
Номер патенту: 112794
Опубліковано: 25.10.2016
Автори: Вінтерер Александер, Шмеккебір Маріо
Мітки: спосіб, ступеневого, контролю, перемикача
Формула / Реферат:
1. Спосіб контролю ступеневого перемикача,де в процесі приведення в дію ступеневого перемикача реєструють обертальний момент привідного двигуна,причому одночасно реєструють відповідне поточне положення ступеневого перемикача,після цього записують визначені протягом певного інтервалу часу значення обертального моменту,потім здійснюють синхронізацію за допомогою синхроімпульсу,і характеристику обертального...
Кроковий перемикальний механізм для силового ступеневого перемикача ступеневого трансформатора
Номер патенту: 109003
Опубліковано: 10.07.2015
Автори: Вільхельм Грегор, Хьопфль Клаус
МПК: F16H 55/10, H01F 29/02, F16H 1/24, H01H 9/00
Мітки: кроковий, механізм, ступеневого, трансформатора, перемикача, силового, перемикальний
Формула / Реферат:
1. Кроковий перемикальний механізм (10) для силового ступеневого перемикача або ступеневого селектора ступеневого трансформатора, в якому принаймні один кулачковий диск (18; 20), приведений у дію за допомогою кривошипного механізму (12), взаємодіє з веденим диском (22) із розміщеними на ньому зачіпними елементами (24), сполученим без можливості обертання з перемикальним валом (40), причому принаймні один кулачковий диск (18; 20) у взаємодії...
Моторний привід для ступеневого перемикача
Номер патенту: 110999
Опубліковано: 10.03.2016
Автор: Полівчик Дітер
Мітки: ступеневого, моторний, перемикача, привід
Формула / Реферат:
Моторний привід для ступеневого перемикача, що містить силовий привід і керуючий привід,причому силовий привід оснащений електродвигуном як привідним двигуном,причому привідний двигун виконаний у формі електродвигуна постійного струму з якірною обмоткою з однієї сторони, а такожпослідовною обмоткою і шунтовою обмоткою з іншої сторони,причому передбачений електричний гальмівний пристрій для привідного двигуна,...
Накопичувач енергії для ступеневого перемикача
Номер патенту: 73205
Опубліковано: 15.06.2005
Автор: Бертль Райнхольд
МПК: H01H 9/00, H01F 29/00
Мітки: перемикача, енергії, накопичувач, ступеневого
Формула / Реферат:
1. Накопичувач енергії для ступеневого перемикача, який містить несучий елемент, звідну каретку, встановлену з можливістю поздовжнього переміщення і сполучену з привідним валом, а також ведений елемент, встановлений з можливістю поздовжнього переміщення і сполучений з веденим валом, причому звідна каретка і ведений елемент встановлені на щонайменше двох орієнтованих у напрямку їх переміщення паралельних напрямних штангах, між звідною кареткою...
Попередній патент: Детектор на основі поверхневого плазмонного резонансу
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Спосіб одержання гідратцелюлозних оболонок