Вітроротор
Номер патенту: 122813
Опубліковано: 25.01.2018
Автори: Шульга Дмитро Валерійович, Вязьмітінов Ігор Анатолійович, Вязьмітінов Олег Ігорович

Формула / Реферат
1. Вітроротор, що містить вал з вертикальною віссю обертання й принаймні дві лопаті, закріплені на валу за допомогою поперечних балок, який відрізняється тим, що лопаті обмежені віртуальними поверхнями еліпсоїдів обертання, параметричне завдання яких має вигляд:
![]() ,
, ![]() ,
, ![]() , (1)
, (1)
де ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() і
і ![]() - малі й великі півосі обмежуючих еліпсоїдів,
- малі й великі півосі обмежуючих еліпсоїдів,
при цьому поверхні лопатей описуються рівняннями
 (2)
(2)
![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() ,
,
а лінії їх перетинання з поверхнями обмежуючих еліпсоїдів обертання мають вигляд:
 (3)
(3)
при ![]() ,
, ![]() ,
, ![]() .
.
2. Вітроротор за п. 1, який відрізняється тим, що лопаті додатково обмежені в осьовому напрямку віртуальними поверхнями кругових конусів
![]() ,
, ![]() ,
, ![]() , (4)
, (4)
i
![]() ,
, ![]() ,
, ![]() , (5)
, (5)
де ![]() ,
, ![]() - половинні кути при вершинах конусів, які вибираються з інтервалів значень
- половинні кути при вершинах конусів, які вибираються з інтервалів значень
![]() і
і ![]() ,
, ![]() ,
, ![]() ,
, ![]() , а параметри
, а параметри ![]() й
й ![]() зв'язані співвідношенням
зв'язані співвідношенням ![]() .
.
3. Вітроротор за п. 1 або 2, який відрізняється тим, що поверхня, що задається рівняннями (3), являє собою медіанну поверхню лопаті, яка в перерізі віртуальною біконічною поверхнею
![]() ,
, ![]() ,
, ![]() , (6)
, (6)
де ![]() ,
, ![]() , має аеродинамічний профіль, звернений носком у протилежну обертанню сторону.
, має аеродинамічний профіль, звернений носком у протилежну обертанню сторону.
Текст
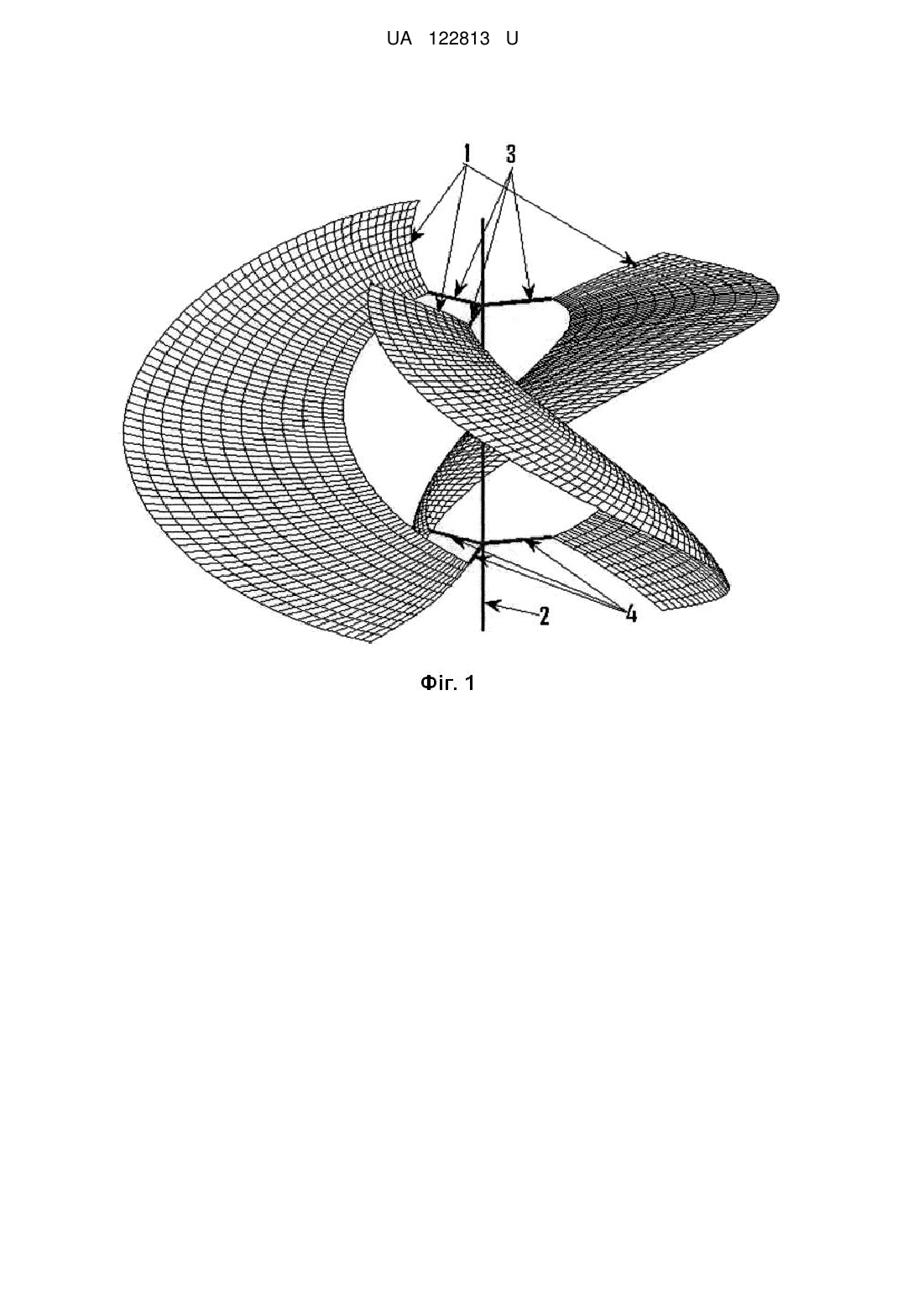
Реферат: Вітроротор містить вал з вертикальною віссю обертання й принаймні дві лопаті, закріплені на валу за допомогою поперечних балок. Лопаті обмежені віртуальними поверхнями еліпсоїдів обертання, параметричне завдання яких має вигляд: x a1,2 sin() cos( ) , y a1,2 sin() sin() , z c1,2 cos( ) , (1) де [0, ] , [0, 2] , a2 a1 , c 2 c1 , a1,2 і c1,2 - малі й великі півосі обмежуючих еліпсоїдів, при цьому поверхні лопатей описуються рівняннями: x a sin() cos( (n 1) 2 / N), y a sin() sin( (n 1) 2 / N), (2) z c cos( ); [0, ] , , a [a1, a2 ] , c [c1, c 2 ] n 1 2,,N , , а лінії їх перетинання з поверхнями обмежуючих еліпсоїдів обертання мають вигляд: x a1,2 sin() cos( (n 1) 2 / N), y a1,2 sin() sin( (n 1) 2 / N), z c1,2 cos( ); при [0, ] , , n 1 2,,N . , (3) UA 122813 U (12) UA 122813 U UA 122813 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вітряних двигунів з віссю обертання ротора, перпендикулярною повітряному потоку, що входить у ротор. Відомий вітроротор Савоніуса (патент US 1697574), що містить вертикальний вал і встановлені уздовж нього дві лопаті, які виконані у вигляді відрізків напівциліндрів, зміщених у діаметральному напрямку відносно один одного з невеликим перекриттям, а також його різні модифікації, що містять більшу кількість напівциліндричних лопатей, які з'єднуються з валом ортогональними до нього балками (траверсами) (Лагода Филипп Иванович, Суков Станислав Викторович, Бубенчикова Татьяна Валерьевна. "Молодой учёный" №22 (126) ноябрь 2016). У цих модифікаціях перекриття відсутнє. При взаємодії лопатей ротора Савоніуса з потоком повітря на їхніх опуклих і ввігнутих частинах створюються різні опори. Це приводить до виникнення обертаючого моменту. Коефіцієнт використання енергії вітру (КВЕВ) ротора Савоніуса звичайно не перевищує 0,15 (теоретична межа КВЕВ для ідеального вітряного двигуна становить 0,59, практично ж він не перевищує значення 0,42). Перевагою вітророторів Савоніуса є високий момент обертання при малій стартовій швидкості і те, що пристрій працює при будь-якому напрямку горизонтального потоку повітря не потрібна система орієнтації - і відсутність обертових зчленувань, що забезпечують електричне з'єднання генератора з іншими системами вітроелектричної станції (ВЕС), тому що генератор нерухомий. До недоліків слід віднести малу швидкохідність, тому що низька частота обертання ротора приводить до необхідності використання мультиплексорів або дорогих багатополюсних генераторів. Недоліком цих вітророторів також є циклічно повторювана сильна зміна умов обтікання лопаті вітровим потоком за один період оберту ротора. Останнє приводить до необхідності всі деталі вітроротора виготовляти з більшим запасом міцності, що дозволяє уникнути механічного руйнування елементів конструкції й серйозних аварій. Відомі вітроротори Дарьє (патент US 1835018) і Дарьє-подібні конструкції роторів (http://vetrogenerator.com.ua/vetrogenerator/vertikal/18 5-moderniziro vannyy-rotor-dare-vetrorotor-izukrainy.html), які містять вертикальний вал, з'єднані з валом вузькі лопаті, медіанна площина яких становить гострий кут із площиною, дотичною до поверхні ротора, і які мають аеродинамічний профіль поперечного перерізу. Обертаючий момент обумовлений виникненням "піднімальної" сили при обтіканні лопатей пристрою вітровим потоком. Таким чином, вітроротор Дарьє являє собою типову ліфт-машину, на відміну від ротора Савоніуса, який є драг-машиною, як, наприклад, вітрило або чашковий анемометр. Ці ротори належать до класу швидкохідних (швидкість найбільш віддаленої від осі обертання точки лопаті в кілька раз перевищує швидкість вітру), а КВЕВ досягає 0,3-0,35. До переваг ротора Дарьє й Дарьє-подібних конструкцій, як і ротора Савоніуса, можна віднести відсутність необхідності в системі орієнтації й обертових зчленувань, що забезпечують електричне з'єднання генератора з іншими системами ВЕС, високі значення КВЕВ, за якими ротори Дарьє не поступаються перед горизонтально-осьовим конструкціями вітрогенераторів, знижений, у порівнянні з горизонтально-осьовими ветрогенераторами, шум, створюваний при роботі, що обумовлене майже рівномірним, через швидкохідність ротора, обтіканням лопат. Недоліки ротора Дарьє значною мірою обумовлені його ж перевагами. Головним із цих недоліком, очевидно, слід уважати високу стартову швидкість вітрового потоку. Оскільки ротор Дарьє являє собою ліфт-машину, для його обертання необхідно створити значну різницю тиску на взаємно протилежних поверхнях лопатей. Це стає можливим тільки при досить високих швидкостях потоку, що обтікає лопаті, повітря. Звідси - висока стартова швидкість потоку. У зв'язку із цим для запуску вітроротора застосовують його попереднє розкручування за допомогою додаткових пристроїв, що знижує загальний коефіцієнт корисної дії ВЕС. Із цим недоліком намагаються боротися використовуючи Дарьє-подібні ротори із прямими вертикальними лопатями, кут атаки яких може регулюватися залежно від швидкості вітру (http://greenvolt.ru/energiva-vetra/vertikalnye-vetrogeneratory/) Слід зазначити ще один недолік, обумовлений високою швидкохідністю ротора Дарьє і йому подібних, а саме: - значні навантаження на щоглу, пов'язані з ефектом Магнуса. Відома гелікоїдна турбіна Горлова (патент US 5451137), яка фактично є вдосконаленою моделлю ротора Дарьє. Вона має закріплені на валу за допомогою поперечних балок спіралеподібні лопаті, робочі поверхні яких являють собою частини прямого гелікоїда. Поперечний переріз лопатей може мати аеродинамічний профіль. Вісь турбіни розташовується ортогонально напрямку потоку повітря або води. Переваги турбіни Горлова забезпечуються саме гелікоїдною (спіралеподібною) формою лопатей і полягають у тому, що вона має малу стартову швидкість потоку енергоносія - близько трьох метрів у секунду в повітрі й півтора метра в секунду у воді, високу плавність ходу при 1 UA 122813 U 5 10 15 20 25 30 35 40 45 50 55 60 швидкохідності приблизно у два - три рази меншій, ніж у ротора Дарьє і, на відміну від останнього, не вимагає попереднього розкручування для запуску. Турбіна Горлова призначена, в основному, для роботи в потоці рідини. Тому інформація про значення КВЕВ відсутня, але відомо, що її енергетична ефективність при роботі у воді досягає значення 0,35. Недоліком конструкції, як, втім, і розглянутих вище пристроїв, є низька ефективність роботи при напрямках швидкості потоку енергоносія, що відхиляється від нормалі до осі обертання турбіни. При співвісному напрямку потоку ефективність роботи пристрою наближається до нуля. Відомий вітроротор Оніпка (патент UA 102689), робочі поверхні лопатей якого, фактично, є вирізками з гелікоїда з мінливою довжиною утворюючої, має вигляд плавної монотонної кривої. Неробоча поверхня - циліндрична спіральна стрічка, радіус намотування якої збільшується в міру віддалення від вершини гелікоїда. Пристрій призначений для роботи зі співвісними вітровими потоками і має максимальну ефективність при певному кроці гелікоїда, що забезпечує на кожному витку співвідношення між висотою робочої поверхні і її неробочою частиною не менш ніж один до двох. Перевагою цього пристрою є мала стартова швидкість. За наявною інформацією одержання енергії можливе при швидкостях вітрового потоку меншій одного метра в секунду, у той час як лопатеві вітряки починають працювати при швидкості не меншій трьох метрів у секунду. Таким чином, вітроротор Оніпка являє собою типову драг-машину (неробоча поверхня лопатей у вигляді циліндричної спіральної стрічки з радіусом намотування, що збільшується, перешкоджає виникненню піднімальної сили) горизонтально-осьового типу з усіма властивими таким пристроям недоліками, а саме: - необхідність мати систему орієнтації, зчленування, що обертається, для передачі електроенергії "споживачам" (іншим системам вітрової електростанції), тому що генератор механічно пов'язаний з валом ротора й під дією системи орієнтації має повертатися в горизонтальній площині, в тому числі й на кут, що перевищує 360 градусів. Крім цього швидкохідність ротора мала, що вимагає застосування мультиплексорів для передачі крутного моменту від вала ротора до генератора або застосування багатополюсних генераторів. Зазначені недоліки деякою мірою нівелюються названими вище перевагами пристрою, але що виявиться кращим - поки що не ясно. Найближчим до вітроротора, що заявляється, є шнековий вітроротор з воронкоподібними гвинтовими лопатями, виконаними у вигляді косого гелікоїда (патент RU 2101560). Внаслідок воронкоподібності лопатей при рівності площ поверхні ліворуч і праворуч від осі обертання їх кривизни не однакові, що обумовлює наявність різниці сил взаємодії з вітровим потоком і, отже, виникнення обертаючого моменту. Крайки робочих поверхонь (увігнутих) гвинтових лопатей шнекового ротора мають гострий кут атаки з потоком, що набігає, і обертаючий момент створюється як за рахунок різниці опору лопатей по обидві сторони від осі ротора, так і за рахунок піднімальних сил. Внаслідок цього КВЕВ підвищується в порівнянні з ротором Савоніуса. Крім цього при обертанні в шнековому роторі немає перерв у взаємодії робочих поверхонь лопатей з вітровим потоком, внаслідок чого ефективність збільшується й КВЕВ досягає величини 0,3, що порівняно з коефіцієнтом використання енергії вітру багатолопатевих вітроколіс. Переваги шнекового вітроротора з воронкоподібними гвинтовими лопатями полягають у тому, що в порівнянні з ротором Савоніуса шнековий вітроротор з воронкоподібними гвинтовими поверхнями лопатей характеризується високою плавністю роботи, відсутністю вібрацій і втомного навантаження, викликаних циклічністю роботи, має більший коефіцієнт використання енергії вітру. У порівнянні зі швидкохідними Дарьє й Дарьє-подібними роторами він створює значно менші акустичні й електромагнітні перешкоди, піддається меншим згинаючим й відцентровим навантаженням, забезпечує більшу енергонфективнвсть при малих швидкостях вітрового потоку і, отже, не вимагає попереднього розкручування. Усе це дозволяє стверджувати, що шнековий вітроротор з воронкоподібними гвинтовими поверхнями лопатей являє собою вдалий симбіоз драг- і ліфт-машини з усіма перевагами, властивими вітророторам з вертикальною віссю обертання. Автори патенту RU 2101560 відзначають, що вітроротор може використовуватися у вертикальному положенні, що конструктивно спрощує вітроустановку й дозволяє ефективно використовувати енергію вітру незалежно від його напрямку. Однак при нахилі осі ротора "за вітром", коли між його віссю й напрямком вітрового потоку утворюється кут, що не є прямим, ефективність відбору енергії вітру шнековим ротором з воронкоподібними гвинтовими поверхнями лопатей підвищується. Таким чином, описаний вітроротор здатний відбирати енергію вітрового потоку, що має як нормальну, так і тангенціальну компоненти швидкості щодо осі ротора. Для одержання 2 UA 122813 U 5 10 15 максимальної ефективності роботи пристрою автори патенту RU 2101560 пропонують у місцевостях з незмінним напрямком вітру використовувати пристрій у фіксованому похилому положенні. У тих місцевостях, де вітер часто змінює напрямок, максимальна ефективність досягається при використанні ротора в складі конструкцій, що орієнтуються. Недоліком шнекового ротора з воронкоподібними гвинтовими лопатями є те, що максимальна ефективність його роботи досягається тільки при похилому розташуванні конструкції щодо вектора швидкості вітрового потоку, що можливо лише при наявності додаткових підтримуючих конструкцій і системи його орієнтації. Цей недолік сильно ускладнює конструкцію ВЕС у цілому й, практично, зводить до нуля переваги використання в її складі вітроротора з вертикальною віссю обертання. Технічною задачею, на вирішення якої направлена корисна модель, є підвищення ефективності роботи вітроротора з вертикальною віссю обертання за рахунок максимального добування енергії як з нормальної, так і тангенціальної щодо осі вітроротора компоненти вітрового потоку, тобто з горизонтальних, що приходять із будь-якого напрямку, і з висхідних потоків енергоносія - вітру. У вітророторі, що містить вал з вертикальною віссю обертання і принаймні дві лопаті, закріплені на валу за допомогою поперечних балок, поставлена задача вирішена тим, що лопаті обмежені віртуальними поверхнями еліпсоїдів обертання, параметричне завдання яких має вигляд: 20 x a1, 2 sin( ) cos( ) , y a1, 2 sin( ) sin( ) , (1) z c1, 2 cos( ) , де [0, ] , [0, 2 ] , a 2 a1 , c 2 c1 , 1, 2 і еліпсоїдів, при цьому поверхні лопатей описуються рівняннями a c1, 2 - малі й великі півосі обмежуючих 25 x a sin( ) cos( (n 1) 2 / N ), y a sin( ) sin( (n 1) 2 / N ), (2) z c cos( ); [0, ] , , a [a1 , a 2 ] , c [c1 , c 2 ] n 1, 2,, N , а лінії їх перетинання з поверхнями обмежуючих еліпсоїдів обертання мають вигляд: x a1, 2 sin( ) cos( (n 1) 2 / N ), y a1, 2 sin( ) sin( (n 1) 2 / N ), (3) z c1, 2 cos( ); 30 при [0, ] , , n 1, 2,, N . Краще, щоб лопаті додатково були обмежені в осьовому напрямку віртуальними поверхнями кругових конусів x1con a1con 01 cos( ) , y1con a1con 01 sin( ) , (4) z1con c1con 01 z 01 , 35 i 3 UA 122813 U x 2con a 2con 02 cos( ) , y 2con a 2 con 02 sin( ) , (5) z 2con c 2con 02 z 02 , де 01 , 02 - половинні кути при вершинах конусів, які вибираються з інтервалів значень 0 01 / 2 і / 2 02 , [0, 2 ] , 0 z 01 c1 , c1 z 02 0 , а параметри a1, 2c on й c1, 2con зв'язані співвідношенням a1, 2con / c1, 2con tg (01, 02 ) . 5 Поверхня, що задається рівняннями (3), являє собою медіанну поверхню лопаті, яка в перерізі віртуальною біконічною поверхнею x con a con 0 cos( ) , y con a con 0 sin( ) , (6) z con c con 0 , 10 15 20 25 30 35 40 45 де 01 0 02 , [0, 2 ] має аеродинамічний профіль, звернений носком у протилежну обертанню сторону. На Фіг. 1 схематично представлений вітроротор згідно з корисною моделлю, на Фіг. 2 наведені залежності швидкості обертання ротора від швидкості потоку повітря. Вітроротор містить лопаті 1, закріплені на валу 2 за допомогою поперечних балок (траверс) 3 і 4. Лопаті, обмежені зсередини й зовні віртуальними поверхнями еліпсоїдів, в окремому випадку - сфер, загальний центр яких лежить на осі обертання, а зверху й знизу - віртуальними конічними поверхнями, вершини яких також лежать на осі обертання, виконані у формі поверхні, утвореної переміщенням двовимірної лінії із заданою кривизною (твірної) уздовж спадної гілки кривої (напрямної) типу Вівіані так, що площина, якій належить твірна, постійно залишається ортогональною внутрішній обмежуючій поверхні й дотичною до напрямної, при цьому довжина твірної постійно залишається обмеженою внутрішньою й зовнішньою віртуальними еліпсоїдальними поверхнями й досягає максимуму в екваторіальній площині, тобто при нульовому значенні кута місця в сферичній системі координат, початок якої збігається з точкою центрів віртуальних обмежуючих еліпсоїдальних поверхонь. У випадку, коли внутрішня обмежуюча поверхня є сферою, напрямна точно збігається із частиною кривої Вівіані. Вітроротор працює в такий спосіб. При ортогональному осі напрямку вітру обертаючий момент виникає за рахунок різниці лобових опорів увігнутих (внутрішніх) і опуклих (зовнішніх) поверхонь лопатей, тобто вітроротор у початковий момент часу працює як драг-машина, що забезпечує малі значення стартової швидкості. Випробування моделі вітроротора в аеродинамічній трубі показали, що в цих умовах обертання починається при швидкості потоку повітря, що не перевищує півтора метра в секунду. Зі збільшенням кількості обертів завдяки наявності гострих кутів атаки лопатей щодо напрямку швидкості потоку починає проявлятися піднімальна сила, що зростає зі збільшенням швидкості обертання й вітроротор переходить у гібридний режим. Відхилення напрямку швидкості потоку повітря супроводжується додатковим збільшенням швидкості обертання ротора, що свідчить про високу ефективність енерговідбору також і від тангенціальних осі обертання компонент потоку. На Фіг. 2 наведені залежності швидкості обертання ротора від швидкості потоку повітря для трьох напрямків щодо осі вітроротора. Лінія, маркована кружечками, відповідає ортогональному осі обертання напрямку потоку, лінія маркована сніжинками - спрямованому під кутом 45 градусів, лінія маркована хрестиками, - співвісному потоку. При виході на гібридний режим роботи швидкохідність моделі вітроротора з максимальним діаметром в 600 мм становить 2,3-2,5. Випробування, проведені з трилопатевою моделлю (Фіг. 1) в аеродинамічній трубі, підтвердили розв'язання поставленого технічного завдання. Висока ефективність відбору енергії тангенціальних компонентів швидкості енергоносія і мала стартова швидкість дозволять при установці вітроротора на природніх або штучних височинах (без використання високих 4 UA 122813 U 5 підтримуючих щогл) забезпечити стабільність одержання енергії навіть при близькій до штильової обстановки. Пристрій, що заявляється, також може ефективно працювати в потоці рідини аналогічно турбіні Горлова, з тією лише різницею, що, на відміну від турбіни Горлова, його ефективність збільшується при відхиленні швидкості потоку енергоносія від нормалі до осі обертання й досягає максимуму при співвісному потоці. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 1. Вітроротор, що містить вал з вертикальною віссю обертання й принаймні дві лопаті, закріплені на валу за допомогою поперечних балок, який відрізняється тим, що лопаті обмежені віртуальними поверхнями еліпсоїдів обертання, параметричне завдання яких має вигляд: x a1,2 sin() cos( ) , y a1,2 sin( ) sin( ) , z c1,2 cos( ) , (1) 15 де [0, ] , [0, 2] , a2 a1 , c 2 c1 , a1,2 і c1,2 - малі й великі півосі обмежуючих еліпсоїдів, при цьому поверхні лопатей описуються рівняннями: x a sin() cos( (n 1) 2 / N), y a sin() sin( (n 1) 2 / N), (2) z c cos( ); [0, ] , , a [a1, a2 ] , c [c1, c 2 ] n 1 2,,N , , а лінії їх перетинання з поверхнями обмежуючих еліпсоїдів обертання мають вигляд: x a1,2 sin() cos( (n 1) 2 / N), 20 y a1,2 sin() sin( (n 1) 2 / N), (3) z c1,2 cos( ); при [0, ] , , n 1 2,,N . , 2. Вітроротор за п. 1, який відрізняється тим, що лопаті додатково обмежені в осьовому напрямку віртуальними поверхнями кругових конусів: x1con a1con 01 cos( ) , y1con a1con 01 sin( ) , z1con c1con 01 z01 , (4) 25 i x 2con a2con 02 cos( ) , y 2con a2con 02 sin( ) , z 2con c 2con 02 z02 , (5) де 01 , 02 - половинні кути при вершинах конусів, які вибираються з інтервалів значень 0 01 / 2 і / 2 02 , [0, 2] , 0 z01 c1 , c1 z02 0 , а параметри a1,2con й c1,2 con зв'язані співвідношенням a1,2con / c1,2con tg(01, 02 ) . 30 3. Вітроротор за п. 1 або 2, який відрізняється тим, що поверхня, що задається рівняннями (3), являє собою медіанну поверхню лопаті, яка в перерізі віртуальною біконічною поверхнею xcon acon 0 cos( ) , y con a con 0 sin() , zcon c con 0 , (6) де 01 0 02 , [0, 2] , має аеродинамічний профіль, звернений носком у протилежну обертанню сторону. 5 UA 122813 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F03D 3/06
Мітки: вітроротор
Код посилання
<a href="https://ua.patents.su/8-122813-vitrorotor.html" target="_blank" rel="follow" title="База патентів України">Вітроротор</a>
Вітроротор
Номер патенту: 77731
Опубліковано: 25.02.2013
Автори: Богаєнко Микола Володимирович, Барабаш В'ячеслав Андрійович, Попков Володимир Сергійович
МПК: F03D 7/00
Мітки: вітроротор
Формула / Реферат:
Вітроротор, що має вертикальний вал з прикріпленими до нього траверсами, на яких змонтовані лопаті аеродинамічного профілю, який відрізняється тим, що лопать в перерізі виконана у вигляді скоби з полками, направленими уподовж хорди лопаті з умовним їх перетином на хорді, полки мають різну довжину і з'єднані між собою рядом перемичок, при цьому рівновеликі полки лопатей направлені до вертикального вала.
Вітроротор
Номер патенту: 56605
Опубліковано: 15.05.2003
Автор: Ходаковський Володимир Іванович
Мітки: вітроротор
Формула / Реферат:
1. Вітроротор, який містить порожнисті лопаті з незамкненим аеродинамічним профілем, встановлені відкритою порожниною зовні і закріплені під зазначеним кутом установки на відповідних траверсах, зв'язаних з вертикальним валом, який відрізняється тим, що траверси мають симетричний відносно горизонтальної площини порожнистий незамкнений профіль із закругленим носком.2. Вітроротор за п. 1, який відрізняється тим, що профіль траверс...
Пристрій для використання енергії потоку
Номер патенту: 63018
Опубліковано: 15.01.2004
Автор: Скрипчінський Вадим Володимирович
МПК: F03D 1/00, F03B 17/06
Мітки: використання, енергії, потоку, пристрій
Формула / Реферат:
Пристрій для використання енергії потоку, що складається з опори, елементів корпусу, ротора, з віссю обертання паралельно потоку і який має лопаті, виконані з можливістю обертання навколо своїх осей в одному напрямі з створенням підйомної сили завдяки ефекту Магнуса, приводів для обертання лопатей, елементів концентрації потоку, регулювання кутової швидкості, обмеження індуктивного опору, орієнтування, а також приймача енергії, який...
Вітродвигун
Номер патенту: 48239
Опубліковано: 10.03.2010
Автори: Пономарчук Ігор Анатолійович, Пономарчук Роксана Олександрівна
МПК: F03D 3/00
Мітки: вітродвигун
Формула / Реферат:
Вітродвигун, що містить ротор з лопатями, який відрізняється тим, що лопаті виконані з можливістю обертання відносно ротора, при цьому обертання лопатей відносно ротора зв'язано з обертанням ротора передаточним відношенням 0,5.
Вітровий двигун
Номер патенту: 6059
Опубліковано: 15.04.2005
Автор: Бордюжа Всеволод Вікторович
МПК: F03D 5/00
Формула / Реферат:
Вітровий двигун, що має не менше трьох лопатей з паралельними осями обертання, розташованих на кінцях важелів, симетрично зв'язаних із ротором, який відрізняється тим, що вільне обертання кожної лопаті обмежене з одного і того ж боку уявною площиною, якій належать осі ротора та відповідної лопаті.
Попередній патент: Комбінований (електро-)магнітний підшипник алєєва кемпа-1
Наступний патент: Змішувач напівфабрикатів
Випадковий патент: Спосіб роздублювання шкіряних відходів