Машина для розкривання трубопроводу
Номер патенту: 29135
Опубліковано: 10.01.2008
Автори: Сляднєв Олег Всеволодович, Мусійко Володимир Данилович, Цибізов Олександр Георгійович, Уруський Олег Семенович, Карпенко Олександр Миколайович, Коваль Андрій Борисович, Лейченко Юрій Борисович
Формула / Реферат
1. Машина для розкривання трубопроводу, що містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана із базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елемента, який з'єднаний з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на відстані одна від одної, змонтовані на задній рамі привідне робоче знаряддя для риття траншей з боків трубопроводу, робоче знаряддя для розкривання трубопроводу зверху, евакуатор ґрунту, який пристосований для переміщення ґрунту від привідного робочого знаряддя у відвал, та пристрій для стеження за положенням трубопроводу, яка відрізняється тим, що вона оснащена щонайменше одним першим силовим приводом, який встановлений між передньою рамою та проміжним елементом і пристосований для примусового повороту та фіксації проміжного елемента відносно передньої рами.
2. Машина за попереднім пунктом, яка відрізняється тим, що вона оснащена щонайменше одним другим силовим приводом, який встановлений між передньою та задньою рамами або між проміжним елементом та задньою рамою і пристосований для примусового повороту та фіксації задньої рами відносно відповідно передньої рами або проміжного елемента.
3. Машина за будь-яким попереднім пунктом, яка відрізняється тим, що проміжний елемент виконаний у вигляді верхньої та нижньої серг, кінці яких за допомогою зазначених переднього та заднього шарнірних з'єднань зв'язані із відповідно передньою та задньою рамами.
4. Машина за будь-яким із пп. 1, 2, яка відрізняється тим, що проміжний елемент виконаний у вигляді Н-подібної проміжної рами, яка включає в себе верхню та нижню горизонтальні частини, кінці яких за допомогою зазначених переднього та заднього шарнірних з'єднань зв'язані із відповідно передньою та задньою рамами, та вертикальну частину, кінці якої жорстко з'єднані із верхньою та нижню горизонтальними частинами проміжної рами.
5. Машина за будь-яким попереднім пунктом, яка відрізняється тим, що оснащена пристроєм автоматичного керування, вихід якого зв'язаний з першим силовим приводом, а вхід - з пристроєм для стеження за положенням трубопроводу.
6. Машина за будь-яким із пп. 1-4, яка відрізняється тим, що вона оснащена пристроєм автоматичного керування, вихід якого зв'язаний з другим силовим приводом, а вхід - з пристроєм для стеження за положенням трубопроводу.
7. Машина за п. 2, яка відрізняється тим, що робоче знаряддя для розкривання трубопроводу зверху та пристрій для стеження за положенням трубопроводу пристосовані для того, щоб не перешкоджати переміщенню заднього кінця привідного робочого знаряддя для риття траншей з боків трубопроводу у напрямку, який по суті горизонтальний та перпендикулярний уявній поздовжній осі трубопроводу.
8. Машина за п. 7, яка відрізняється тим, що робоче знаряддя для розкривання трубопроводу зверху виконане в вигляді плуга, який має остов з опорними елементами, що пристосовані для переміщення по трубопроводу так, щоб поздовжня уявна вісь остова простягалася по суті вздовж поздовжньої уявної осі трубопроводу, та важіль, задній кінець якого зв'язаний з остовом шарнірним з'єднанням з можливістю повороту навколо першої по суті вертикальної уявної осі та по суті горизонтальної уявної осі, яка розташована перпендикулярно поздовжній осі трубопроводу, а передній кінець зв'язаний з привідним робочим знаряддям для риття траншей з боків трубопроводу або з задньою рамою, при цьому важіль має шарнірне з'єднання, яке визначає другу по суті вертикальну вісь повороту, яка в напрямі переміщення машини розташована на відстані від першої вертикальної осі, а пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої першої вертикальної осі повороту.
9. Машина за п. 2, яка відрізняється тим, що пристрій для стеження за положенням трубопроводу виконаний з можливістю визначення кутового та лінійного положення поздовжньої осі трубопроводу.
10. Машина за п. 8, яка відрізняється тим, що пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої другої вертикальної осі повороту.
11. Машина за будь-яким попереднім пунктом, яка відрізняється тим, що вона оснащена пристроєм механічного типу, який пристосований для фіксації одна з одною передньої та задньої рам, при цьому передня рама зв'язана з базовим шасі шарнірним з'єднанням з можливістю примусового повороту навколо уявної осі повороту, яка розташована по суті горизонтально та перпендикулярно уявній поздовжній осі базового шасі, яка визначається напрямком його руху.
12. Машина за п. 11, яка відрізняється тим, що вона оснащена щонайменше одним покажчиком такого положення серги та задньої рами, при якому їх поздовжні осі направлені по суті вздовж згаданої поздовжньої уявної осі базового шасі.
13. Машина за будь-яким із пп. 1-10, яка відрізняється тим, що вона оснащена пристроєм механічного типу, який пристосований для фіксації задньої рами із базовим шасі, при цьому передня рама зв'язана з базовим шасі жорстко.
14. Машина за попереднім пунктом, яка відрізняється тим, що пристрій механічного типу, який пристосований для фіксації задньої рами із базовим шасі, виконаний у вигляді двох фіксаторів, які встановлені на задній частині рами базового шасі або задній рамі і мають висувні пальці, а на відповідно задній рамі або рамі базового шасі виконані гнізда, пристосовані для введення в них зазначених пальців фіксаторів.
15. Машина за будь-яким попереднім пунктом, яка відрізняється тим, що вона оснащена щонайменше однією опорою, яка змонтована на задній рамі та пристосована для того, щоб за допомогою силового приводу примусово встановлюватись на ґрунт і примусово підніматись над ґрунтом, причому опора для обпирання на ґрунт розміщена в напрямку переміщення машини спереду привідного робочого знаряддя для риття траншей з боків трубопроводу та позаду осі згаданого заднього шарнірного з'єднання.
Текст
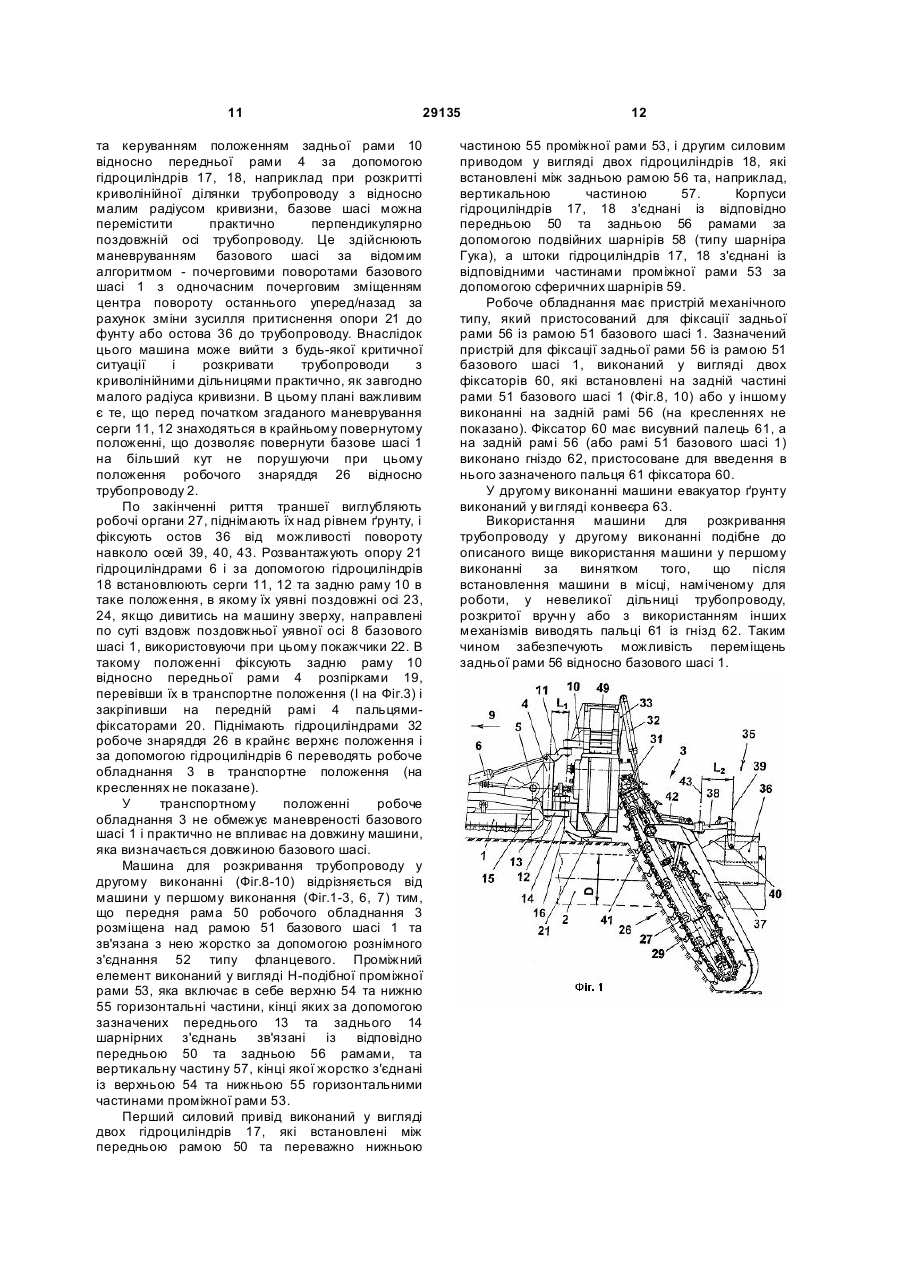
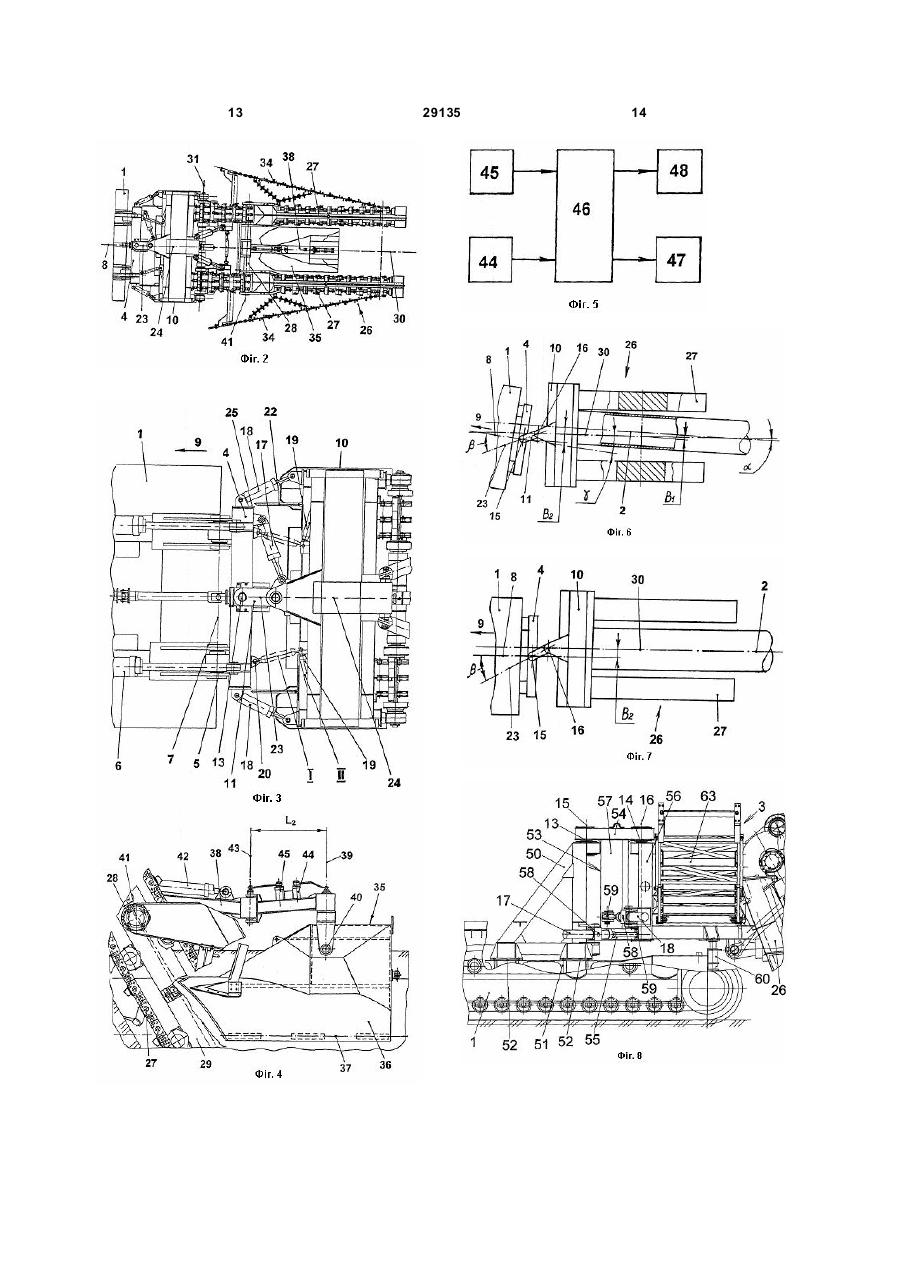
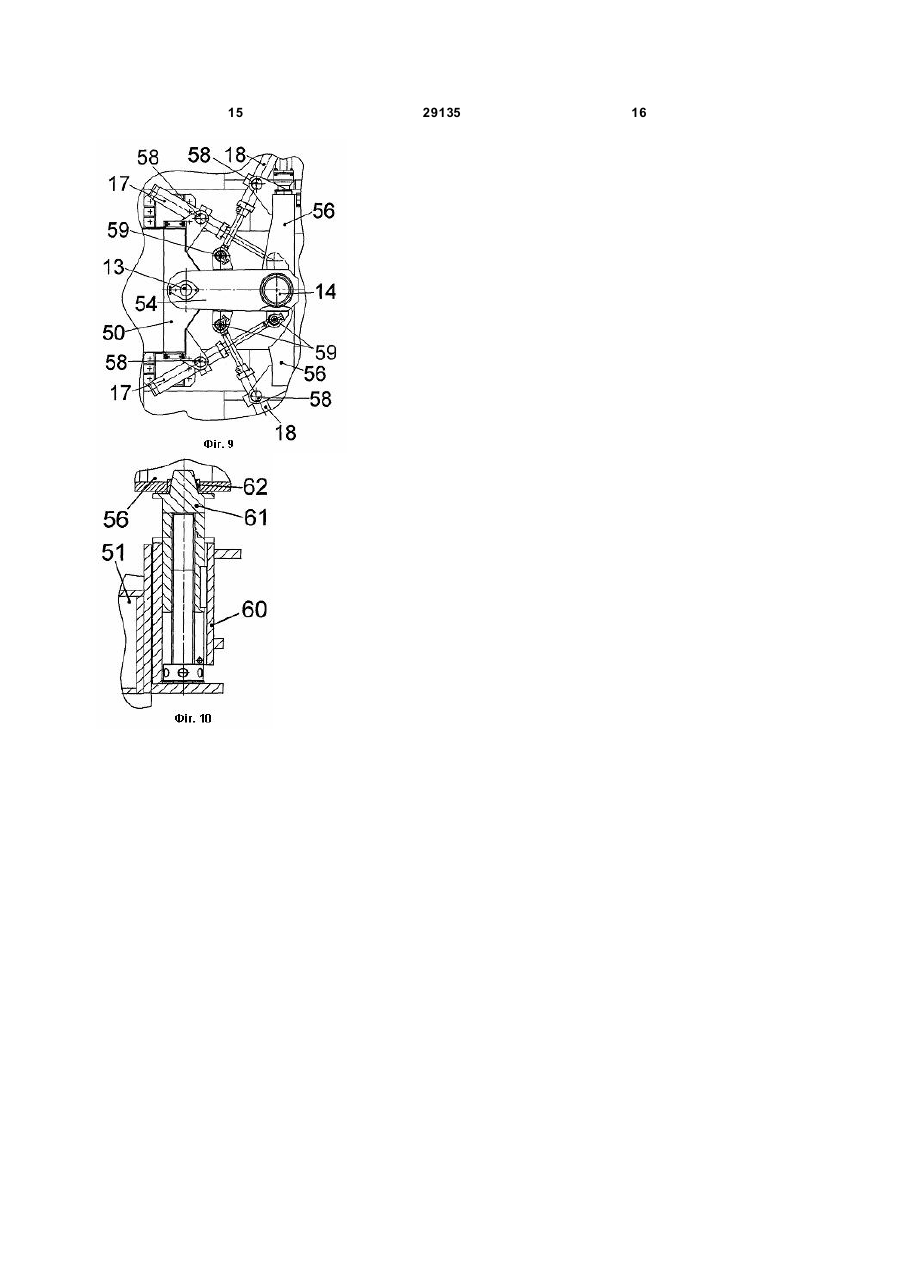
1. Машина для розкривання трубопроводу, що містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана із базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елемента, який з'єднаний з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на відстані одна від одної, змонтовані на задній рамі привідне робоче знаряддя для риття траншей з боків трубопроводу, робоче знаряддя для розкривання трубопроводу зверху, евакуатор ґрунту, який пристосований для переміщення ґрунту від привідного робочого знаряддя у відвал, та пристрій для стеження за положенням трубопроводу, яка відрізняється тим, що вона оснащена щонайменше одним першим силовим приводом, який встановлений між передньою рамою та проміжним елементом і пристосований для примусового повороту та фіксації проміжного елемента відносно передньої рами. 2. Машина за попереднім пунктом, яка відрізняє ться тим, що вона оснащена щонайменше одним другим силовим приводом, який встановлений між передньою та задньою рамами або між проміжним елементом та задньою рамою і пристосований для примусового повороту та фіксації задньої рами відносно відповідно передньої рами або проміжного елемента. 3. Ма шина за будь-яким попереднім пунктом, яка відрізняє ться тим, що проміжний елемент виконаний у вигляді верхньої та нижньої серг, кінці яких за допомогою зазначених переднього та 2 (19) 1 3 29135 4 переміщення машини розташована на відстані від першої вертикальної осі, а пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої першої вертикальної осі повороту. 9. Машина за п. 2, яка відрізняється тим, що пристрій для стеження за положенням трубопроводу виконаний з можливістю визначення кутового та лінійного положення поздовжньої осі трубопроводу. 10. Машина за п. 8, яка відрізняється тим, що пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої другої вертикальної осі повороту. 11. Машина за будь-яким попереднім пунктом, яка відрізняє ться тим, що вона оснащена пристроєм механічного типу, який пристосований для фіксації одна з одною передньої та задньої рам, при цьому передня рама зв'язана з базовим шасі шарнірним з'єднанням з можливістю примусового повороту навколо уявної осі повороту, яка розташована по суті горизонтально та перпендикулярно уявній поздовжній осі базового шасі, яка визначається напрямком його руху. 12. Машина за п. 11, яка відрізняється тим, що вона оснащена щонайменше одним покажчиком такого положення серги та задньої рами, при якому їх поздовжні осі направлені по суті вздовж згаданої поздовжньої уявної осі базового шасі. 13. Машина за будь-яким із пп. 1-10, яка відрізняє ться тим, що вона оснащена пристроєм механічного типу, який пристосований для фіксації задньої рами із базовим шасі, при цьому передня рама зв'язана з базовим шасі жорстко. 14. Машина за попереднім пунктом, яка відрізняє ться тим, що пристрій механічного типу, який пристосований для фіксації задньої рами із базовим шасі, виконаний у вигляді двох фіксаторів, які встановлені на задній частині рами базового шасі або задній рамі і мають висувні пальці, а на відповідно задній рамі або рамі базового шасі виконані гнізда, пристосовані для введення в них зазначених пальців фіксаторів. 15. Машина за будь-яким попереднім пунктом, яка відрізняє ться тим, що вона оснащена щонайменше однією опорою, яка змонтована на задній рамі та пристосована для того, щоб за допомогою силового приводу примусово встановлюватись на ґрунт і примусово підніматись над ґрунтом, причому опора для обпирання на ґрунт розміщена в напрямку переміщення машини спереду привідного робочого знаряддя для риття траншей з боків трубопроводу та позаду осі згаданого заднього шарнірного з'єднання. Корисна модель відноситься до області землерийних робіт при ремонті підземних трубопроводів для транспорту нафти, газу, нафтопродуктів або інших речовин, зокрема до області землерийних машин для розкривання трубопроводу з привідними робочими органами для риття траншей з боків трубопроводу. Відома машина для розкривання трубопроводу, що містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана з базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елементу, виконаного у вигляді верхньої та нижньої серг, кінці яких з'єднані з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на відстані одна від одної, змонтовані на задній рамі привідне робоче знаряддя для риття траншей з боків трубопроводу та робоче знаряддя для розкривання трубопроводу зверху, евакуатор ґрунту, який Пристосований для переміщення ґрунту від привідного робочого знаряддя у відвал, та пристрій для стеження за положенням трубопроводу. На відміну від заявленої відома машина не має силового приводу, який встановлений між передньою рамою та проміжним елементом. [Патент України №20377, М.Кл. Е02F5/06, 1997]. Внаслідок цього неможливо здійснювати примусовий поворот проміжного елемента відносно передньої рами і тим самим компенсувати відхилення базового шасі від поздовжньої осі трубопроводу. У відомій машині наявність проміжного елемента практично не покращує маневреність машини при розкритті трубопроводу. В основу корисної моделі поставлена задача в машині для розкривання трубопроводу шляхом оснащення силовим приводом для примусового повороту проміжного елемента відносно передньої рами покращити маневреність машини при розкритті тр убопроводу. Вказана задача вирішена тим, що машина для розкривання трубопроводу, яка містить базове шасі, яке пристосоване для переміщення машини вздовж трубопроводу, передню раму, що зв'язана із базовим шасі, задню раму, що зв'язана з передньою рамою за допомогою проміжного елемента, який з'єднаний з передньою та задньою рамами відповідно переднім та заднім шарнірними з'єднаннями, що мають по суті вертикальні уявні осі повороту, які в напрямі переміщення машини розташовані на відстані одна від одної, змонтовані на задній рамі привідне робоче знаряддя для риття траншей з боків трубопроводу, робоче знаряддя для розкривання трубопроводу зверху, евакуатор ґрунту, який пристосований для переміщення ґрунту від привідного робочого знаряддя у відвал, та пристрій для стеження за положенням трубопроводу, згідно з корисною 5 29135 моделлю оснащена щонайменше одним першим силовим приводом, який встановлений між передньою рамою та проміжним елементом і пристосований для примусового повороту та фіксації проміжного елемента відносно передньої рами. Завдяки наявності силового приводу, який встановлений між передньою рамою та проміжним елементом І пристосований для примусового повороту та фіксації проміжного елемента відносно передньої рами, покращується маневреність машини при розкритті трубопроводу. В окремих випадках здійснення корисної моделі машина оснащена щонайменше одним другим силовим приводом, який встановлений між передньою та задньою рамами або між проміжним елементом та задньою рамою і пристосований для примусового повороту та фіксації задньої рами відносно відповідно передньої рами або проміжного елемента. Завдяки цьому маневреність машини при розкритті трубопроводу покращується в більшій мірі. Крім того, зазначені вище позитивні властивості машини посилюються та доповнюються іншими завдяки тому, що проміжний елемент виконаний у вигляді верхньої та нижньої серг, кінці яких за допомогою зазначених переднього та заднього шарнірних з'єднань зв'язані із відповідно передньою та задньою рамами. Проміжний елемент виконаний у вигляді Н-подібної проміжної рами, яка включає в себе верхню та нижню горизонтальні частини, кінці яких за допомогою зазначених переднього та заднього шарнірних з'єднань зв'язані із відповідно передньою та задньою рамами, та вертикальну частину, кінці якої жорстко з'єднані із верхньою та нижню горизонтальними частинами проміжної рами. Машина оснащена пристроєм автоматичного керування, вихід якого зв'язаний з першим силовим приводом, а вхід з пристроєм для стеження за положенням трубопроводу. Машина оснащена пристроєм автоматичного керування, вихід якого зв'язаний з другим силовим приводом, а вхід з пристроєм для стеження за положенням трубопроводу. Робоче знаряддя для розкривання трубопроводу зверху та пристрій для стеження за положенням трубопроводу пристосовані для того, щоб не перешкоджати переміщенню заднього кінця привідного робочого знаряддя для риття траншей з боків трубопроводу у напрямку, який по суті горизонтальний та перпендикулярний уявній поздовжній осі трубопроводу. Робоче знаряддя для розкривання трубопроводу зверху виконане в вигляді плуга, який має остов з опорними елементами, що пристосовані для переміщення по трубопроводу так, щоб поздовжня уявна вісь остова простягалася по суті вздовж поздовжньої уявної осі трубопроводу, та важіль, задній кінець якого зв'язаний з остовом шарнірним з'єднанням з можливістю повороту навколо першої по суті вертикальної уявної осі та по суті горизонтальної уявної осі, яка розташована перпендикулярно поздовжній осі трубопроводу, а передній кінець зв'язаний з привідним робочим знаряддям для 6 риття траншей з боків трубопроводу або з задньою рамою, при цьому важіль має шарнірне з'єднання, яке визначає другу по суті вертикальну вісь повороту, яка в напрямі переміщення машини розташована на відстані від першої вертикальної осі, а пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої першої вертикальної осі повороту. Пристрій для стеження за положенням трубопроводу виконаний з можливістю визначення кутового та лінійного положення поздовжньої осі трубопроводу. Пристрій для стеження за положенням трубопроводу включає датчик або інший прилад для контролю кута повороту навколо згаданої другої вертикальної осі повороту. Машина оснащена пристроєм механічного типу, який пристосований для фіксації одна з одною передньої та задньої рам, при цьому передня рама зв'язана з базовим шасі шарнірним з'єднанням з можливістю примусового повороту навколо уявної осі повороту, яка розташована по суті горизонтально та перпендикулярно уявній поздовжній осі базового шасі, яка визначається напрямком його руху. Ма шина оснащена щонайменше одним покажчиком такого положення серги та задньої рами, при якому їх поздовжні осі направлені по суті вздовж згаданої поздовжньої уявної осі базового шасі. Машина оснащена пристроєм механічного типу, який пристосований для фіксації задньої рами із базовим шасі при цьому передня рама зв'язана з базовим шасі жорстко. Пристрій механічного типу, який пристосований для фіксації задньої рами із базовим шасі, виконаний у вигляді двох фіксаторів, які встановлені на задній частині рами базового шасі або задній рамі і мають висувні пальці, а на відповідно задній рамі або рамі базового шасі виконані гнізда, пристосовані для введення в них зазначених пальців фіксаторів. Машина оснащена щонайменше однією опорою, яка змонтована на задній рамі та пристосована для того, щоб за допомогою силового приводу примусово встановлюватись на фунт і примусово підніматись над фунтом, причому опора для обпирання на ґрунт розміщена в напрямку переміщення машини спереду привідного робочого знаряддя для риття траншей з боків трубопроводу та позаду осі згаданого заднього шарнірного з'єднання. Корисна модель пояснена кресленнями, на яких на: Фіг.1 показано перше виконання машини для розкривання трубопроводу, вигляд збоку; Фіг.2 - те ж, вид звер ху; Фіг.3 - вузол з'єднання між собою передньої та задньої рам машини за Фіг.1; Фіг.4 - робоче Знаряддя для розкривання трубопроводу зверху з датчиками пристрою для стеження за положенням трубопроводу; Фіг.5 - фрагмент блок схеми системи керування машиною; Фіг.6 - 7 - схематичні зображення, що пояснюють роботу машини у першому виконанні 7 29135 Фіг.8 - др угий варіант виконання машини для розкривання трубопроводу, фрагмент вигляду збоку Фіг.9 - вузол з'єднання між собою передньої та задньої рам машини за Фіг.8; Фіг.10 фіксатор пристрою, який пристосований для фіксації задньої рами із базовим шасі, машини за Фіг.8. Машина для розкривання трубопроводу у першому виконанні (Фіг.1-3, 6, 7) складається з базового шасі 1, яке пристосоване для переміщення машини вздовж трубопроводу 2, і робочого обладнання 3. Робоче обладнання 3 включає в себе передню раму 4, що розміщена позаду базового шасі 1 та зв'язана з рамою базового шасі 1 у першому виконанні машини шарнірним з'єднанням 5 з можливістю примусового повороту за допомогою гідроциліндрів 6 навколо уявної осі 7 шарнірного з'єднанням 5. Вісь 7 розташована по суті горизонтально та перпендикулярно уявній поздовжній осі 8 базового шасі 1, яка визначається напрямком його руху, що позначений на кресленні стрілкою 9. Робоче обладнання 3 включає в себе також задню раму 10, що зв'язана з передньою рамою 4 за допомогою проміжного елемента, виконаного у вигляді верхньої 11 та нижньої 12 серг, які з'єднані з передньою З та задньою 10 рамами відповідно переднім 13 та заднім 14 шарнірними з'єднаннями. Переднє 13 та заднє 14 шарнірні з'єднання мають по суті вертикальні уявні осі повороту відповідно 15, 16, які в напрямі переміщення машини розташовані на відстані Li одна від одної. Обладнання 3 оснащене першим силовим приводом у вигляді щонайменше одного гідроциліндра 17, який встановлений між передньою рамою 4 та переважно нижньою сергою 12, і другим силовим приводом у вигляді двох гідроциліндрів 18, які встановлені між передньою 4 та задньою 10 рамами. Корпуси та штоки гідроциліндрів 17, 18 з'єднані з рамами 4, 10 та сергою 12 шарнірами. У випадку коли передня рама 4 навішена на базове шасі 1 шарнірним з'єднанням 5 для можливості переведення робочого обладнання 3 в транспортне положення воно повинне мати пристрій для фіксації одна з одною передньої 4 та задньої 10 рам. Функції згаданого пристрою можуть виконувати перший та другий силові приводи (гідроциліндри 17, 18). Але в переважному виконанні машини згаданий пристрій виконаний механічного типу у вигляді розпірок 19, які мають гвинтовий механізм для регулювання їх довжини. Кожна розпірка 19 одним кінцем шарнірно закріплена на передньому торці задньої рами 10, а на іншому кінці має вушко з отвором для пальця-фіксатора 20, за допомогою якого розпірка 19 в робочому положенні машини зафіксована на задній рамі 10, а в транспортному положенні - з'єднана з передньою рамою 10 (Фіг.3). Робоче обладнання 3 оснащене щонайменше однією опорою 21, яка змонтована безпосередньо на задній рамі 10 та пристосована для того, щоб за допомогою силового приводу (гідроциліндрів 6) 8 примусово встановлюватись на ґрунт і примусово підніматись над ґрунтом. Робоче обладнання 3 оснащене покажчиками 22 такого положення серг 11, 12 та задньої рами 10, при якому їх уявні поздовжні осі 23, 24, якщо дивитись на машину зверху, направлені по суті вздовж згаданої поздовжньої уявної осі 8 базового шасі 1. Згадані покажчики 22 виконані у вигляді стрижнів, одні кінці яких шарнірами з'єднані з переднім торцем задньої рами 10, а інші розташовані біля бічних граней 25 передньої рами 4. Безпосередньо на задній рамі 10 змонтоване привідне робоче знаряддя 26 для риття траншей з боків трубопроводу 2, яке складається з двох привідних ланцюгових робочих органів 27, кожний з яких призначений для риття траншеї з відповідної сторони трубопроводу 2, та поперечини 28, яка зв'язує між собою рами 29 робочих органів 27. Робочі органи 27 розташовані симетрично уявній поздовжній осі 30 робочого знаряддя 26, рознесені на відстань, яка більше діаметра трубопроводу D, і змонтовані на задньому торці задньої рами 10 з можливістю примусового повороту у вертикальній площині навколо уявної осі 31 привідних валів робочих органів 27. Поздовжня вісь 30 робочого знаряддя, якщо дивитись на машину зверху, по суті е продовженням поздовжньої осі 24 задньої рами 10. Силовий привід для примусового повороту робочого знаряддя 26 виконаний у вигляді гідроциліндрів 32, зв'язаних за допомогою подвійних (типу шарніра Гука) або сферичних шарнірів з кронштейном 33 задньої рами 10 і кронштейнами рам 29 робочих органів 27. Робоче знаряддя має два укісники 34 для утворення укосів траншей. Згадана опора 21 розміщена в напрямку переміщення машини спереду привідного робочого знаряддя 26 та позаду осі 16 заднього шарнірного з'єднання 14. Робоче знаряддя для розкривання трубопроводу 2 зверху змонтоване на поперечині 28 привідного робочого знаряддя 26 для риття траншей з боків трубопроводу 2 та виконане в вигляді плуга 35. Плуг 35 має остов 36 з опорними елементами, що пристосовані для переміщення по трубопроводу 2 так, щоб поздовжня уявна вісь 37 остова 36 простягалася по суті вздовж поздовжньої уявної осі трубопроводу 2. Плуг 35 має також важіль 38, задній кінець якого зв'язаний з остовом 36 шарнірними з'єднаннями з можливістю повороту навколо першої по суті вертикальної уявної осі 39 та по суті горизонтальної уявної осі 40, яка розташована перпендикулярно поздовжній осі трубопроводу 2, а передній кінець зв'язаний з поперечиною 28 з можливістю примусового повороту навколо уявної осі 41 за допомогою гідроциліндра 42. При цьому важіль 38 виконаний з двох ланок, які з'єднані між собою шарнірним з'єднання, яке визначає другу по суті вертикальну вісь 43 повороту, яка в напрямі переміщення машини розташована на відстані 1-2 від першої вертикальної осі 39. Плуг 35 має засоби для блокування шарнірних з'єднань важеля 38 з 9 29135 остовом 36 та ланок важеля 38 між собою, які у включеному стані не допускають можливість повороту навколо осей 39, 40, 43, а в виключеному стані не заважають зазначеному повороту (на кресленнях не показані). У такому виконанні робоче знаряддя для розкривання трубопроводу 2 зверху не перешкоджає переміщеннюзаднього кінця привідного робочого знаряддя 26 для риття траншей з боків трубопроводу 2 у напрямку, який по суті горизонтальний та перпендикулярний уявній поздовжній осі трубопроводу 2. Пристрій для стеження за положенням трубопроводу 2 включає датчики 44, 45 або інші прилади для контролю кутів повороту навколо згаданих відповідно першої 39 та другої 43 вертикальних осей повороту. Згадані датчики 44, 45 зв'язані з входами блоку 46 автоматичного керування робочим обладнанням машини або машиною в цілому. Блок 46 автоматичного керування має виходи, які зв'язані з електрогідророзподілювачами 47, 48, що пристосовані для керування гідроціліндрами 17, 18. В інших виконаннях машини може бути тільки один датчик 44. Робоче обладнання 3 має евакуатор ґрунту, який пристосований для переміщення ґрунту від привідного робочого знаряддя 26 в відвал. Евакуатор може бути виконаний у вигляді конвеєра 63 (Фіг.8) або, наприклад, як показано на кресленнях за Фіг.1-3 у вигляді лопатевого метальника 49. При цьому задня рама 10 виконана у вигляді корпусу згаданого метальника 49. Машина для розкривання трубопроводу у першому виконанні працює таким чином. Машин у встановлюють в місці, наміченому для роботи, у невеликої дільниці трубопроводу, розкритої вручн у або з використанням інших механізмів. Робоче обладнання 3 переводять з транспортного положення, в якому воно розташоване в основному над базовим шасі (на кресленнях не показане), в робоче положення (Фіг.1, 2), опускаючи при цьому передню раму 4 за допомогою гидроциліндрів б до установки опори 21 на ґрунт. Від'єднують розпірки 19 від передньої рами 4, витягуючи пальці-фіксатори 20, і закріпляють їх на задній рамі 10 за допомогою згаданих пальцівфіксаторів 20 (в положенні II на Фіг.3). За допомогою гідроциліндрів 32 опускають привідне робоче знаряддя 26, не доводячи робочі органи 27 до ґрунту на 10-15см. Знімають блокування шарнірних з'єднань важеля 38 з остовом 36 та ланок важеля 38 між собою, забезпечуючи можливість повороту навколо осей 39, 40, 43. За допомогою гідроциліндра 42 опускають важіль 38 до установки остова 36 на трубопровід 2 і починають рух машини вздовж трубопроводу 2. Одночасно плавно заглубляють робочі органи 27 в ґрунт. При цьому остов 36 за допомогою гідроциліндра 42 притискається до трубопроводу 2 з нормованим зусиллям рівним, наприклад, 2тс, яке автоматично підтримується постійним за рахунок обмеження тиску робочої рідини в гідроциліндрі 42 незалежно від навантаження на 10 робоче знаряддя 26 і його положення відносно трубопроводу 2. Керування базовим шасі 1 по курсу в р учному режимі здійснює оператор, який при цьому керується показами приладів на панелі керування про положення базового шасі 1 та робочого обладнання 3 відносно трубопроводу 2, а в автоматичному - блок 46, таким чином, щоб забезпечити правильне положення в плані робочих органів 27 відносно трубопроводу 2. Положення базового шасі 1 та робочого обладнання 3 відносно трубопроводу 2 визначає блок 46, знімаючи сигнали з датчиків 44, 45 та інших датчиків, які на кресленнях не показані, але використання яких для спеціаліста відоме, наприклад, в прототипі, та опрацьовуючи сигнали датчиків за відомим алгоритмом. В кращому виконанні блок 46 може включати в себе комп'ютер, який завдяки наявності двох датчиків 44, 45 може визначити в плані як лінійне відхилення В1 робочих органів 27 в напрямку перпендикулярно поздовжній осі трубопроводу 2, так і кутове відхилення а поздовжньої осі робочого знаряддя 26 відносно поздовжньої осі трубопроводу 2 (Фіг.6). Правильне положення в плані робочих органів 27 відносно трубопроводу 2 досягається не тільки шляхом керування по курсу базовим шасі 1 але й керуванням положенням задньої рами 10 відносно передньої рами 4 за допомогою гідроциліндрів 17, 18. Відносно невелике відхилення В2 передньої осі 15 від поздовжньої осі трубопроводу 2 в плані може бути повністю компенсоване шляхом повороту серг 11, 12 на деякий кут b таким чином, що і лінійне В1, і кутове a відхилення робочих органів 27 рівні нулю (Фіг.7). Величина найбільшого відхилення B'2max, яке може бути компенсоване за рахунок повороту серг 11, 12 гідроциліндром 17, визначається відстанню L1 між осями 15, 16 та найбільшим кутом b max повороту серг 11, 12, тобто B'2max=L1*sin b max. У випадку коли В2>B'2max серги 11, 12 повертають на найбільший можливий кут b max і фіксують в крайньому положенні гідроциліндром 17. Потім гідроциліндрами 18 повертають задню раму 10 навколо задньої осі 16 таким чином, щоб лінійне Ві і кутове а відхилення робочих органів 27 та кут g між поздовжніми осями 8, 30 відповідно базового шасі 1 та робочого знаряддя 26 були в межах допуску (Фіг.6). Переміщення заднього кінця привідного робочого знаряддя 26 по суті перпендикулярно уявній поздовжній осі трубопроводу 2 можливе тому, що остов 36 плуга 35 може зміщуватись відносно робочих органів 27 в напрямку перпендикулярно поздовжній осі 30 робочого знаряддя 26 завдяки наявності двох осей повороту 39, 43, які розташовані на відстані L 2. Керування положенням задньої рами 10 відносно передньої рами 4 за допомогою гідроциліндрів 17, 18 в ручному режимі здійснює оператор, а в автоматичному - блок 46. В критичних умовах коли правильне (в межах допуску) положення в плані робочих органів 27 відносно трубопроводу 2 неможливо буде забезпечити керуванням базового шасі 1 по курсу 11 29135 та керуванням положенням задньої рами 10 відносно передньої рами 4 за допомогою гідроциліндрів 17, 18, наприклад при розкритті криволінійної ділянки трубопроводу з відносно малим радіусом кривизни, базове шасі можна перемістити практично перпендикулярно поздовжній осі трубопроводу. Це здійснюють маневруванням базового шасі за відомим алгоритмом - почерговими поворотами базового шасі 1 з одночасним почерговим зміщенням центра повороту останнього уперед/назад за рахунок зміни зусилля притиснення опори 21 до фунту або остова 36 до трубопроводу. Внаслідок цього машина може вийти з будь-якої критичної ситуації і розкривати трубопроводи з криволінійними дільницями практично, як завгодно малого радіуса кривизни. В цьому плані важливим є те, що перед початком згаданого маневрування серги 11, 12 знаходяться в крайньому повернутому положенні, що дозволяє повернути базове шасі 1 на більший кут не порушуючи при цьому положення робочого знаряддя 26 відносно трубопроводу 2. По закінченні риття траншеї виглубляють робочі органи 27, піднімають їх над рівнем ґрунту, і фіксують остов 36 від можливості повороту навколо осей 39, 40, 43. Розвантажують опору 21 гідроциліндрами 6 і за допомогою гідроциліндрів 18 встановлюють серги 11, 12 та задню раму 10 в таке положення, в якому їх уявні поздовжні осі 23, 24, якщо дивитись на машину зверху, направлені по суті вздовж поздовжньої уявної осі 8 базового шасі 1, використовуючи при цьому покажчики 22. В такому положенні фіксують задню раму 10 відносно передньої рами 4 розпірками 19, перевівши їх в транспортне положення (І на Фіг.3) і закріпивши на передній рамі 4 пальцямифіксаторами 20. Піднімають гідроциліндрами 32 робоче знаряддя 26 в крайнє верхнє положення і за допомогою гідроциліндрів 6 переводять робоче обладнання 3 в транспортне положення (на кресленнях не показане). У транспортному положенні робоче обладнання 3 не обмежує маневреності базового шасі 1 і практично не впливає на довжину машини, яка визначається довжиною базового шасі. Машина для розкривання трубопроводу у другому виконанні (Фіг.8-10) відрізняється від машини у першому виконання (Фіг.1-3, 6, 7) тим, що передня рама 50 робочого обладнання 3 розміщена над рамою 51 базового шасі 1 та зв'язана з нею жорстко за допомогою рознімного з'єднання 52 типу фланцевого. Проміжний елемент виконаний у вигляді Н-подібної проміжної рами 53, яка включає в себе верхню 54 та нижню 55 горизонтальні частини, кінці яких за допомогою зазначених переднього 13 та заднього 14 шарнірних з'єднань зв'язані із відповідно передньою 50 та задньою 56 рамами, та вертикальну частину 57, кінці якої жорстко з'єднані із верхньою 54 та нижньою 55 горизонтальними частинами проміжної рами 53. Перший силовий привід виконаний у вигляді двох гідроциліндрів 17, які встановлені між передньою рамою 50 та переважно нижньою 12 частиною 55 проміжної рами 53, і другим силовим приводом у вигляді двох гідроциліндрів 18, які встановлені між задньою рамою 56 та, наприклад, вертикальною частиною 57. Корпуси гідроциліндрів 17, 18 з'єднані із відповідно передньою 50 та задньою 56 рамами за допомогою подвійних шарнірів 58 (типу шарніра Гука), а штоки гідроциліндрів 17, 18 з'єднані із відповідними частинами проміжної рами 53 за допомогою сферичних шарнірів 59. Робоче обладнання має пристрій механічного типу, який пристосований для фіксації задньої рами 56 із рамою 51 базового шасі 1. Зазначений пристрій для фіксації задньої рами 56 із рамою 51 базового шасі 1, виконаний у вигляді двох фіксаторів 60, які встановлені на задній частині рами 51 базового шасі 1 (Фіг.8, 10) або у іншому виконанні на задній рамі 56 (на кресленнях не показано). Фіксатор 60 має висувний палець 61, а на задній рамі 56 (або рамі 51 базового шасі 1) виконано гніздо 62, пристосоване для введення в нього зазначеного пальця 61 фіксатора 60. У другому виконанні машини евакуатор ґрунту виконаний у ви гляді конвеєра 63. Використання машини для розкривання трубопроводу у другому виконанні подібне до описаного вище використання машини у першому виконанні за винятком того, що після встановлення машини в місці, наміченому для роботи, у невеликої дільниці трубопроводу, розкритої вручн у або з використанням інших механізмів виводять пальці 61 із гнізд 62. Таким чином забезпечують можливість переміщень задньої рами 56 відносно базового шасі 1. 13 29135 14 15 29135 16
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine for pipeline opening
Автори англійськоюKarpenko Oleksandr Mykolaiovych, Koval Andrii Borysovych, Leichenko Yurii Borysovych, Musiiko Volodymyr Danylovych, Sliadnev Oleh Vsevolodovych, Sliadniev Oleh Vsevolodovych, Uruskyi Oleh Semenovych, Tsybizov Oleksandr Heorhiiovych
Назва патенту російськоюМашина для раскрытия трубопровода
Автори російськоюКарпенко Александр Николаевич, Коваль Андрей Борисович, Лейченко Юрий Борисович, Мусийко Владимир Данилович, Сляднев Олег Всеволодович, Уруский Олег Семенович, Цыбизов Александр Георгиевич
МПК / Мітки
МПК: E02F 5/02
Мітки: розкривання, машина, трубопроводу
Код посилання
<a href="https://ua.patents.su/8-29135-mashina-dlya-rozkrivannya-truboprovodu.html" target="_blank" rel="follow" title="База патентів України">Машина для розкривання трубопроводу</a>
Машина для розкривання трубопроводу і робочий орган
Номер патенту: 20377
Опубліковано: 25.12.1998
Автори: Чєрняєв Валєрій Давидовіч, Джарджіманов Алєксандр Сєргєєвіч, Мамонтов Юрій Міхайловіч, Мовчан Алій Андрійович, Биков Олександр Володимирович, Ібрагімов Марат Шаріповіч, Мусійко Володимир Данилович, Кумилганов Алєксандр Сємьоновіч, Василенко Станіслав Кузьмич, Решетніков Володимир Парфьонович, Яковлєв Віктор Іванович
МПК: E02F 5/02
Мітки: робочий, розкривання, машина, орган, трубопроводу
Формула / Реферат:
1. Машина для вскрытия трубопровода, содержащая базовое шасси и рабочее оборудование, включающее в себя раму с эвакуатором грунта, которая шарнирпо связана с базовым шасси с возможностью поворотов в горизонтальной и вертикальной плоскостях, рабочий орган, который выполнен в виде цепных секции, смонтированных на раме с эвакуатором грунта, копирное устройство, выполненное в виде опоры на трубопровод, которая шарннрно закреплена с...
Машина для засипання трубопроводу і ланцюговий грохот-транспортер
Номер патенту: 56247
Опубліковано: 15.05.2003
Автори: Мусійко Володимир Данилович, Бойко Анатолій Олександрович, Яковлєв Віктор Іванович, Лейченко Юрій Борисович, Василенко Станіслав Кузьмич, Цибізов Олександр Георгійович, Биков Олександр Володимирович, Живора Валерій Федорович
МПК: B07B 1/10, B07B 1/34, E02F 5/22
Мітки: ланцюговий, трубопроводу, засипання, машина, грохот-транспортер
Формула / Реферат:
1. Машина для засипання трубопроводу, що містить навішене на транспортний засіб робоче обладнання, що включає в себе просіювальний пристрій для поділу грунту на фракції і їх вивантаження із зміщенням уздовж напрямку руху машини і пристрій для навішування просіювального пристрою на транспортний засіб, яка відрізняється тим, що просіювальний пристрій містить у собі, щонайменше, один ланцюговий грохот-транспортер. 2. Машина за п. 1, яка...
Спосіб підтримування трубопроводу в траншеї, трубопідтримувальна машина та трубопідтримувальний пристрій
Номер патенту: 45404
Опубліковано: 15.04.2002
Автори: Стецьків Михайло Володимирович, Савенок Василь Іванович, Цибізов Олександр Георгійович, Яковлєв Віктор Іванович, Мусійко Володимир Данилович, Биков Олександр Володимирович, Лейченко Юрій Борисович, Скрипковський Олексій Миколайович, Василенко Станіслав Кузьмич
МПК: F16L 1/028, F16L 1/00
Мітки: спосіб, машина, трубопідтримувальний, підтримування, траншеї, трубопроводу, трубопідтримувальна, пристрій
Формула / Реферат:
1. Спосіб підтримування трубопроводу в траншеї, що включає підтримування трубопроводу на відстані від дна траншеї з використанням, щонайменше, одного трубопідтримувального пристрою з одночасним його обпиранням на ґрунт і переміщення трубопідтримувального пристрою вздовж трубопроводу, який відрізняється тим, що при підтримуванні трубопроводу трубопідтримувальний пристрій обпирають на ґрунт стінок траншеї.2. Спосіб за п. 1, який...
Машина для реконструкції рейкової колії

Номер патенту: 73105
Опубліковано: 15.06.2005
Автори: Тойрер Йозеф, Бруннінгер Манфред
МПК: E01B 29/00
Мітки: машина, рейкової, колії, реконструкції
Формула / Реферат:
1. Машина для реконструкції рейкової колії (4), яка має шпалоприймальний пристрій (43) для приймання старих шпал (3), пристрій для укладання шпал (21), призначений для укладання нових шпал (3), збиральний пристрій (11) з розвантажувальним кінцем (15), розташований позаду шпалоприймального пристрою (43) та призначений для приймання щебеню, і стрічковий транспортувальний пристрій (17) для подання щебеню до кінця машини (33), де знаходиться...
Машина для реконструкції рейкової колії

Номер патенту: 73293
Опубліковано: 15.07.2005
Автори: Йозеф Тойрер, Манфред Бруннінгер
МПК: E01B 27/00, E01B 29/00
Мітки: рейкової, колії, машина, реконструкції
Формула / Реферат:
1. Машина (1) для реконструкції рейкової колії (2), що має власну раму (5), яка опирається на ходові механізми (4), і зв'язану з двома пристроями для транспортування шпал (19, 21), що рознесені між собою в поздовжньому напрямку машини і призначені для прийому старих шпал (20) чи укладання нових шпал (22) і між якими знаходиться гусеничний ходовий механізм (17), а також планувальник баласту (23), яка відрізняється тим, що планувальник (23)...
Попередній патент: Спосіб засипки воронки
Наступний патент: Футбольне поле
Випадковий патент: Спосіб профілактики дисфункції плаценти у вагітних з захворюваннями щитоподібної залози