Імітатор ходьби космонавта
Номер патенту: 33186
Опубліковано: 15.02.2001
Автори: Каденюк Леонід Костянтинович, Лапутін Анатолій Миколайович, Канішевський Станислав Михайлович, Петрушевський Іван Іванович
Текст
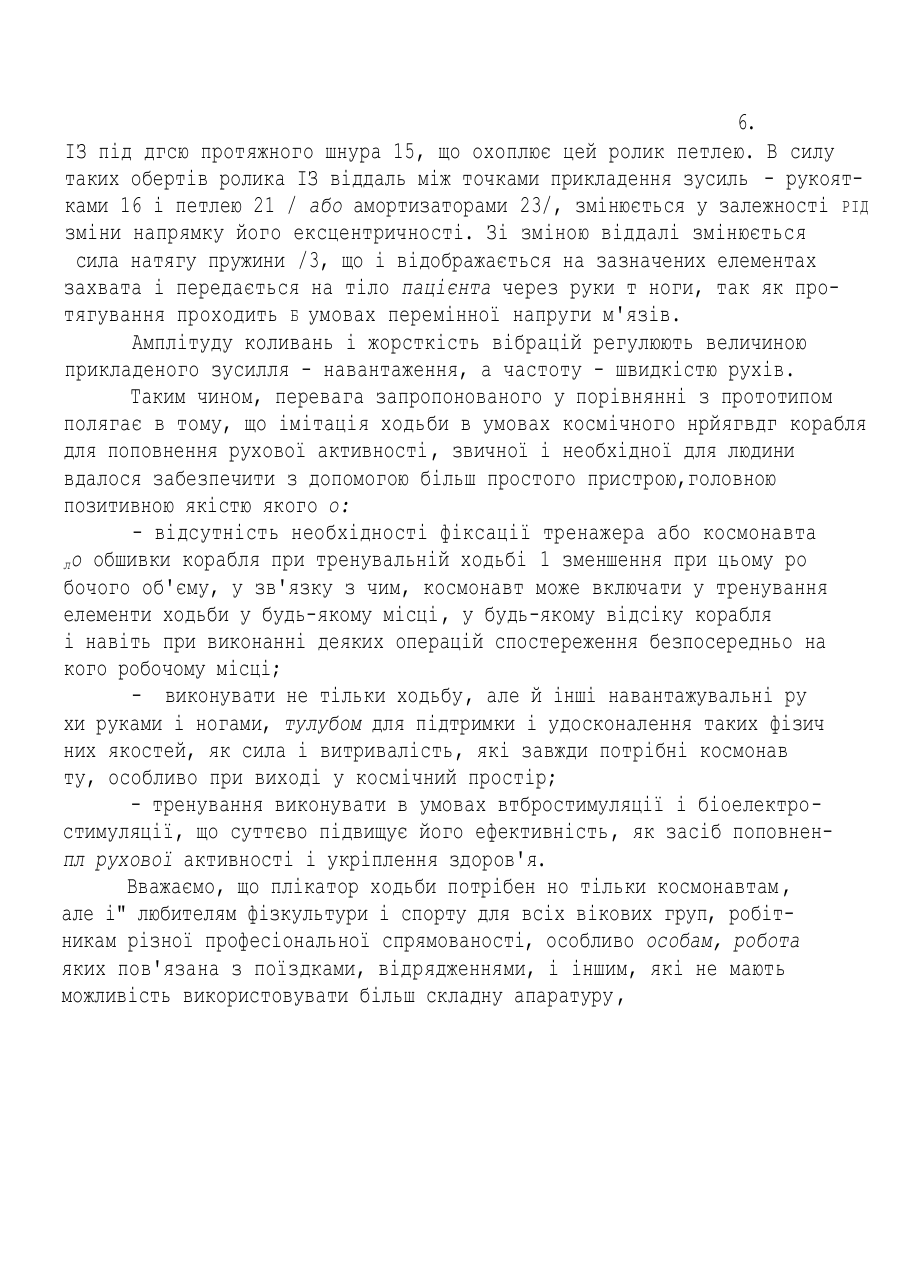
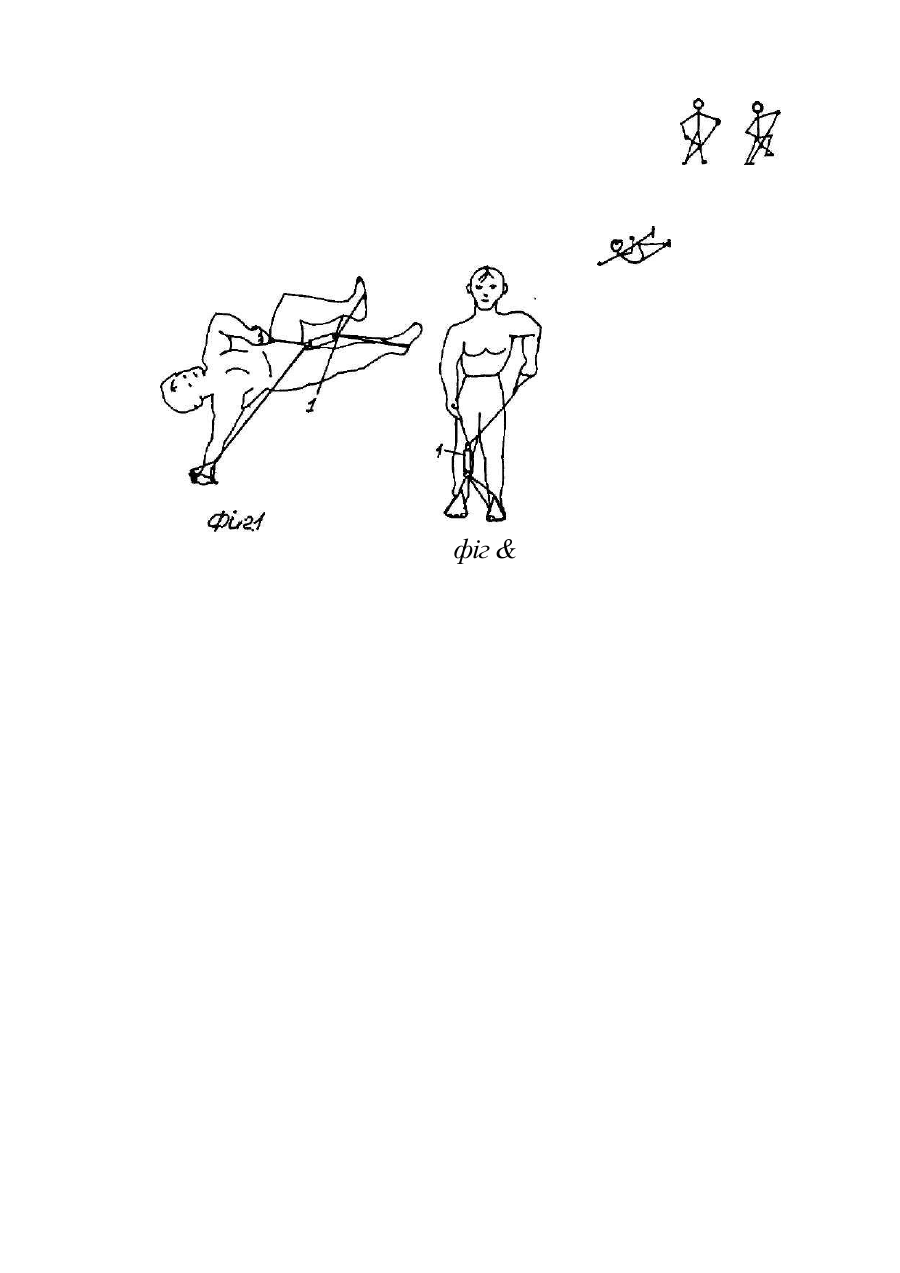
ІШЖ-В АбЗВ 23/095 ІМІТАТОР ХОДЬБИ КОСМОНАВТА Передбачуваний винахід відноситься до спорту і медицини, зокрема, до пристроїв, що забезпечують рухову активність у вигляді ходьби &ля профілактики і укріплення здоров"я в умовах космічних польотів. Відома доріжка, що біжить, містить в собі раму з приводом, з шківами і транспортерну стрічку на опбрній основі і засіб виміру кута нахилу стрічки і каретки, що контактує з кулачковим валом /див. авт, св. СРСР, №1395344, А63В 69/10,, Вюл.Н8,і988/, Недолік цієї доріжки і інших, подібних їй, полягає в тому, [до вони непридатні для установки і використання в космічних кораблях з за громіздкості, відсутності там гравітації і затраченого електроживлення, необхідного для їх приводів. Відомий велотренажер, що містить основу з кронштейном, що несе рухливе сидіння зі спинкою,засіб фіксації сидіння , ножний і ручний педальні механізми і кінематично звиязані з ними засобі створення навантаження з засобами вібрації /див. ав.св. СРСР №1694163, А 63 В 22/06, Бюл.№44, 1991/. Недолік його і подібних йому велотренажерів в тому, що всі вони хоч і менше громіздкі, але всаж непридатні для оснащення космічних кораблів з вищезазначених причин. Відомий пристрій для оцінки фізичної працездатності, що містить навантажувальний механізм з ножними педалями , регулятор навантаження і регістратор, при цьому педалі взаємно пов"язані з пластинами, закріпленими на гомілках ніг. /див.авт.св. №1609470, А 6ІВ5/22, Бюл.М4,1990/. Недолік цього пристрою в тому, що хоч він і міг бути примїненим #а умов відсутності гравітації і має портативний вигляд, але все ж потребує електроживлення для регістратора і тому теж непридатний для космонавтів. До того ж, навантаження задається тільки на ноги і немає ніяких засобів для підвищення її ефективності. Відомий біоелектричний стимулятор, що містить два електроди з різнополгасних металів - один з яких цинк, а другий - мідь, або їх заміни щоці, пов^язані між собою електрично - провідником і тілом пацієнта і що мають у ланцюзі електровимірювальну і регулюючу 2. апаратуру /див, кн. під ред. ЕД.Магарета, Биоэлектростимуляция и рефлексотерапия, Одесса, 1989, с.43,44/. Недолік цього стимулятора у тому, що потрібні спеціальні пристрої для закріплення електродів і вимірювальної апаратури, що незручно для користування в умовах космічних польотів і особливо у процесі фізичного тренування. Відома"Кардіоваскулярна тренувальна машина ", що містить засіб для переміщення і навантаження ніг, виконавчу вигляді рами і дврх спрямовуючих, що несуть рухливі каретки для розміщення стоп ніг і засіб для переміщення і навантаження рук, виконаний вигляді рукояток, закріплених на повзунах, встановлених з можливістю їх гальмування / див. п. США, №4529194, А 63В 69/18, 1985/. Недолік цієї машини в тому, що вона недостатньо повно моделює акт ходьби людини, не пристосовала для розвитку силових якостей м'язів рук, ніг, тулуба і не містить ніяких пристроїв для стимуляції рухової активності. Машина громіздка, конструктивно складна,, для установки на сучасних космічних кораблях неприйнятна. Найбільш близьким за 'технічною суттю і споживацькими якостями є тренажер для розвитку серцево-судинної системи космонавта, що містить горизонтально розташовану раму з двома спрямовуючими, що несуть каретки з платформами для ніг, і привід, що включає гнучку тягу, що охоплює опірний блок з роликами і рукоятки, при цьому він має поясний ремінь, зв"язаний з рамою з допомогою пружних тяг, що сполучаються через блоки з рукоятками, /див. авт.св. СРСР №1769906, А 6313 69/18, 23/04, Бюл. №39, 1992/. Недолік цього прототипу у тому, що він займає багато місця у кабіні корабля, потребує фіксації з його обшивкою, а отже, спеціальної ділянки площі для його розташування і тренування. До того ж, він не має ніяких засобів стимуляції, необхідних в умовах дефіциту часу і простору, а також мало сприяє розвитку якості сили, що необхідно космонавту постійно , бо необхідно виходити у космічний простір . Поставлена зада.ча вирішується тим, що у пристрої, що містить опйрний блок-засіб створення навантаження, з"єднаний з допомогою гнучкої тяги, що охоплює цей блок, згідно передбачуваному винаходу, засіб створення навантаження виконаному вигляді циліндра , що має кришку, всередині якого розташована підпружинениїї до нього через його опірний диск скрученим пластинчатий шток з фланцем, і забезпечений механізмом індикації навантаження і пристроєм біоелек-тростимуляції, а опірний блок цього засобу закріплений ззовні 3. циліндра на торці скрученого пластинчатого штока і виконаний у вигляді охопленого петлею гнучкою тягою ексцентрика, рукоятки ж виконані у вигляді розиємних петель з кінців гнучкої тяги, забезпечених пряжками з можливістю їх подовження і скорочення, при дьому механізм індикації навантаження виконаний у вигляді шкали, поділки якої нанесені на криш*ф циліндра по краю вирізу, всередині якого вміщено рухливий індекс , закріплений на встановленому між опірним диском і кришкою поворотному диску , що має соосний з їх отворами профільний виріз для вміщення скрученого пластинчастого штока, а пристрій біоелектростимуля^ії виконано у вигляді електродів з різнополюсних металів, що створюють гнучкі трубки рукояток, настромлені на роз нємні петлі гнучкої тяги, що мають у своєму складі: одна ~ цинк, а друга мідь або їх замінники і пов п язаш між собою електрично.. Технічний і споживацький результат, що досягається ЕІД використання сукупностей відрізняюча* ознак запропонованого пристрою, полягає в тому, що оа рахунок заі/тни засобу створення навантаження пружинним циліндром вдалося полегшити імітатор ходьби, зробити *ого портативним і набагато більше придатним для використання у кабінах сучасних космічних кораблів, а застосування вібро- і біоелектричної стимуляції у вигляді механізму вібрації та електродів з разнополюсних металів дало можливість підвищити ефективність тренування, прискорити Логбі створити для нЬЙ&більш зручні і сприятливі умови. Сутність запропонованого пояснюється кресленнями, де на фіг 1 подано загальний вигляд ,'^г^гс імітатора у роботі в космосі; па фіг.Z - те ж, у земних умовах; на фіг.З - деякі варіанти використання імімтатора схематично; на фіг.4 - загальний вигляд імітатора, вигляд спереду, у просвіті; на фіг.5 -те ж, вигляд збоку без пружини зі знятими амортизаторами ; на фіг.б - вузли фіксації і механізми індикації навантаження , вид спереду з розривом; на фіг.7 - те ж, вид збоку; на фіг.В -механізм індикації навантаження, вид зверху; на фіг.^ - захоплююча петля тягового шнура з його подовжувачем, схематично: вид спереду - А, вид збоку - б, на фіг.10 - пряжка тягового шура. Конкретно тмішатор ходьби містить пружинний навантажувач 4 У вигляді циліндра 2, всередині якого вміщена пружина З і пластинчатий згорнутий шток 4 з опірними елементами Ь -флянцем штока % і опірним диском, закріпленим у циліндрі 4. зверху. Всередині циліндра зверху над опірним диском вміщений механізм індекації навантаження - його поворотний диск 6 з індексом 7 і вирізом 8, виконаним у вигляді усікнення штоку 4. ЦиліндРперекритий кришкою 9, на якій виконано: для проходження штока - круглий отвір, з для переміщення індекса 7 - дуговидний виріз 10, поряд з яким нанесені поділки шкали II, регістрації величини навантаження /див.фіг,8/. На штоці 4 зверху виконана провушина 12, у якій на осі встановлено ексцентричний ролик ІЗ і фіксована спрямовуюча обойма 14, через яку пропущені вітки гнучкої тяги у вигляді тягового шнура 15, виконаного'з струмопровІД-ного матеріалу і и киї1' має на кінцях ним створені петлі 16, регульовані і фіксовані по довжині з допомогою кінцевих пряжок 17, що імітують рукоятки з подовжувачами тягового шнура 15. На захоплюючій частині1кожної петлі надіта розрізна трубка .18, одна з них виконана з матеріалу, що має у своєму складі цинк, э інша мідь. Обидрі трубки пов'язані між собою електрично через струмопровїдниії тяговій шнур 15 г біомеридіани тіла пацієнта, тобто, трубки на рукоятках представляють собою електроди, виконані з різнополюсних металів. На кожній з них є повздовжний боковий розріз 19 для пропуску шнура 15 при змінених його довжини. Знизу циліндра 2 прикріплені провушини 20 - одна для закріплення петлі 21, що виконана з нетягнуЧого міцного гнучкого ма теріалу і має гнучку передвижну, настромлену на неї опірну трубку 22, дві інших - для "приєднання пружних гумових джгутівамортизаторів 23, набір яких передасться імітатору з опірними трубками 24, крючками-захоплювачами 25. Користуються імітатором ходьби і в земних t в космічних умовах діяльності космонавта. Використовують для імітації акту ходьби, якого так не достає в умовах космічного польоту і на пружено-інтелектуальиого життя космонавта на землі , а також для доповнення рухової активності, дефіцит якої почуває тепер кожний і особливо , космонавт. Навантаження можна створювати на руки, ноги і тулуб, як показало у деяких варіантах на фіг.1,2,3. При цьому м"язова динамічно-статична робота здійснюється в умовах вібро і біо / електростимуляції,що як відомо, підвищує ефективність фізичного тренування при збереженні її оптимальної тривалості, поглиблює сприятливу лікувально-профілактичну дію на організм того, хто займається. 5. При навантаженні на руки імітатор петель 21 фіксується на одній або двох ногах, а петлі рукоятки 16 пацієнт бере в руки і поперемінно виконує ними різноманітні за напрямком і зусиллям рухи - одну рукоятку протягує, а іншу попускає, але при цьому шнур 15 знаходиться у натягнутому положенні, що відповідає заданому навантаженню, яку він контролює і витримує, виходячи з положення индекса 7 на шкалі 1І. Це здійснюється таким чином. При рухах з навантаженням опір створюється стисканням пружини 3, так як витягу-сться вгору шток 4, стискаючи її між дисками 5, нижній з яких рухо-ми/, а верхній укріплений у циліндрі і пропускає шток через сві/ круглий отвір. При русі штоку через виріз d, його поворотний диск б провертається і закріплений на ньому диск 7 переміщується від нульового положення шкали II по вирізу 10 до значення навантаження, що подається на елементи 16, 21,23. При навантаженні на нот користуються амортизаторами 23, хоча і при роботі руками м'язи ніг також діють , але переважно статичною роботою. Можна при цьому виконувати безліч навантажувальних діГл /див,фіг.1,2,3/, наприклад, виконувати педалювання, що широко використовується у велотерапії. Рукоятки 16 утримують руками, а ногами поперемінно, а можна і одночасно, виконують прямолінійні або коловидні рухи, приблизно те, що показано на фіг. І. При навантаженні одночасно на руки і на ноги , що характерно для ходьби, руками поперемінно перетягують шнур 15, а ногами перехресно по відношенню до рук розтягують амортизатори 23 - див.фіг.1,2, З, і теж установлюють, регулюють і контролюють навантаження по шкалі її, завжди повернутою до обличчя космонавта і миє поділки пофар-, бовані контрастно, а також іадекс ?. Па тулуб навантаження подається при виконанні різних поеднувальних рухів руками і ногами в умовах нахилів - уперед, назад, праворуч, ліворуч і різноманітних поворотів /див,фіг.З/. У всіх випадках через тіло пацієнта, через функціонуючі м'язові маси і інші структури тіла підсилюється потік електронів під дією зазначених разнополюсних металів - цинку / або його замінювачів/, і міді / або її замінювачів/, це х забезпечує стимуляцію процесів обміну і підсилює роботу м'язів. При цьому трубки IB можна міняти, а для стимулювання ніг утримують руками петлю 21, а на трубки IB рукояток 16 діють ногами /див.рис.З/. Бібродія і її стимуляція також протікають при всіх рухах і руками і ногами. Це здіГснюється за рахунок обертання ексцентричного ролика 6. ІЗ під дгсю протяжного шнура 15, що охоплює цей ролик петлею. В силу таких обертів ролика ІЗ віддаль між точками прикладення зусиль - рукоятками 16 і петлею 21 / або амортизаторами 23/, змінюється у залежності РІД зміни напрямку його ексцентричності. Зі зміною віддалі змінюється сила натягу пружини /3, що і відображається на зазначених елементах захвата і передається на тіло пацієнта через руки т ноги, так як протягування проходить Б умовах перемінної напруги м'язів. Амплітуду коливань і жорсткість вібрацій регулюють величиною прикладеного зусилля - навантаження, а частоту - швидкістю рухів. Таким чином, перевага запропонованого у порівнянні з прототипом полягає в тому, що імітація ходьби в умовах космічного нрйягвдг корабля для поповнення рухової активності, звичної і необхідної для людини вдалося забезпечити з допомогою більш простого пристрою,головною позитивною якістю якого о: - відсутність необхідності фіксації тренажера або космонавта ло обшивки корабля при тренувальній ходьбі 1 зменшення при цьому ро бочого об'єму, у зв'язку з чим, космонавт може включати у тренування елементи ходьби у будь-якому місці, у будь-якому відсіку корабля і навіть при виконанні деяких операцій спостереження безпосередньо на кого робочому місці; - виконувати не тільки ходьбу, але й інші навантажувальні ру хи руками і ногами, тулубом для підтримки і удосконалення таких фізич них якостей, як сила і витривалість, які завжди потрібні космонав ту, особливо при виході у космічний простір; - тренування виконувати в умовах втбростимуляції і біоелектростимуляції, що суттєво підвищує його ефективність, як засіб поповненпл рухової активності і укріплення здоров'я. Вважаємо, що плікатор ходьби потрібен но тільки космонавтам , але і" любителям фізкультури і спорту для всіх вікових груп, робітникам різної професіональної спрямованості, особливо особам, робота яких пов'язана з поїздками, відрядженнями, і іншим, які не мають можливість використовувати більш складну апаратуру , фіг &
ДивитисяДодаткова інформація
Назва патенту англійськоюDevicefor imitating walking in cosmonaut
Автори англійськоюLaputin Anatolii Mykolaiovych, Kadeniuk Leonid Kostiantynovych, Petrushevskyi Ivan Ivanovych, Kanishevskyi Stanislav Mykhailovych
Назва патенту російськоюИмитатор ходьбы космонавта
Автори російськоюЛапутин Анатолий Николаевич, Каденюк Леонид Костянтинович, Петрушевский Иван Иванович, Канишевский Станислав Михайлович
МПК / Мітки
МПК: A63B 23/035
Мітки: імітатор, космонавта, ходьби
Код посилання
<a href="https://ua.patents.su/8-33186-imitator-khodbi-kosmonavta.html" target="_blank" rel="follow" title="База патентів України">Імітатор ходьби космонавта</a>
Профілактично – тренувальний пояс космонавта
Номер патенту: 33185
Опубліковано: 15.02.2001
Автори: Канішевський Станислав Михайлович, Лапутін Анатолій Миколайович, Петрушевський Іван Іванович, Каденюк Леонід Костянтинович
МПК: A61H 23/06, A61H 11/00
Мітки: космонавта, пояс, тренувальний, профілактично
Текст:
...1.М.Кузнецова, що описується у винаході №1153919, А61Н 39/001, 1985. Він містить матерчату основу з розташованими на ній голчастими irv-лтка.торами у вигляді. модулей, що обиєднуються за площиною дії / ДИЕ.також В.ї.бвдо-кимов "Рефденсопрофілактика втомлення і професійного стресу ", Кіровоград, 1990, с.38./. Недолік цього пристрою у тому, що він потребує тривалого часу для досягнення достатньої ефективності і не передбачений^для...
Пристрій для полегшення ходьби
Номер патенту: 25226
Опубліковано: 30.10.1998
Автор: Васильченко Петро Власович
МПК: A63B 21/06
Мітки: полегшення, ходьби, пристрій
Формула / Реферат:
1. Пристрій для полегшення ходьби, який має сапожки, який відрізняється тим, що сапожки з'єднані між собою витою пружиною - через поводок з пластинкою прикріпленою до верхньої частини халявки сапожка, з можливістю розтягування пружини, при ходьбі, і переміщенню її по поводку.2. Пристрій для полегшення ходьби за п.1, який відрізняється тим, що поводки прикріплені до ножних браслетів, з можливістю фіксації браслета на голені.
Пристрій для ходьби

Номер патенту: 26806
Опубліковано: 12.11.1999
Автор: Осадчій Євгеній Олександрович
МПК: A63B 25/00, A61H 3/00
Формула / Реферат:
Устройство для ходьбы, содержащее опорные рычаги, шарнирно соединенные одним концом с опорой для туловища в подмышечной области, а другим - с опорной платформой для обуви, поддерживающие ремни, механизм фиксации коленного шарнира с храповым зубчатым зацеплением, кинематически связанный с подвижной опорой, при этом оба рычага выполнены с возможностью осевого перемещения и один из них связан с опорной платформой, а другой - шарнирно соединен с...
Імітатор великих опорів
Номер патенту: 5411
Опубліковано: 28.12.1994
Автори: Пацарнюк Ярослав Васильович, Микийчук Микола Миколайович, Яцук Василь Олександрович
МПК: G01R 27/00
Мітки: великих, опорів, імітатор
Формула / Реферат:
(57) 1. Имитатор больших сопротивлений, содержащий три внешних вывода, высоковольтный делитель напряжения, операционный усилитель, управляемый делитель напряжения и мультирезстор с электромагнитным экраном, первый вход высоковольтного делителя напряжения соединен с первым внешним выводом, а второй вход - с выходом первого операционного усилителя, инвертирующий вход которого соединен с выходом высоковольтного делителя напряжения, второй выход...
Імітатор електромагнітних імпульсів
Номер патенту: 17781
Опубліковано: 20.05.1997
Автори: Даценко Вікторія Петрівна, Кравченко Володимир Іванович, Нєскородов Геннадій Федорович, Князєв Володимир Володимирович
МПК: H03K 5/01
Мітки: електромагнітних, імітатор, імпульсів
Формула / Реферат:
Имитатор электромагнитных импульсов, содержащий последовательно соединенные импульсный источник питания, первую переходную секцию, полеобразующую систему в виде несимметричной полосковой линии, в рабочем объеме которой расположена испытываемая радиоэлектронная система, вторую переходную секцию и оконечное устройство, отличающийся тем, что в рабочий объем полеобразующей системы имитатора дополнительно введен генератор помех, содержащий...
Попередній патент: Профілактично – тренувальний пояс космонавта
Наступний патент: Пульсатор доїльного апарата
Випадковий патент: Профіль стернового комплексу судна