Візуальна система наведення метальної установки типу гарпунної гармати
Формула / Реферат
1. Візуальна система наведення метальної установки типу гарпунної гармати, що містить два сервоприводи розвороту метальної установки по азимуту і куту місця в системі координат носія, з’єднаний з ними блок визначення кутів потрібного просторового положення вектора кидання, до входів якого ввімкнений комплекс датчиків ураховуваних факторів наведення, включаючи датчик дистанції до цілі, і вимірювач кутів просторового розвороту лінії візирування, що складається з розміщеного на оголів’ї оператора-навідника реперного вузла, не менш, ніж одного базового блока і підключеного до них блока визначення кутів: просторового розвороту і лінії візирування, а також прицільний пристрій у вигляді встановленого на оголів’ї оптичного візирного приладу з формувачем зображення індексу лінії візирування, який підключений до блока визначення кутів потрібного просторового положення вектора кидання, яка відрізняється тим, що в ній кожний базовий блок вимірювача встановлений за допомогою пристрою кріплення на додатково введеній траверсі, яка розміщена з можливістю розворотів по куту місця у вертлюзі, котрий змонтований з можливістю розворотів по азимуту в опорному пристрої типу колонки-тумби на робочому майданчику оператора-навідника, при цьому траверса споряджена принаймні однією рукояткою і давачем розвороту по куту місця, вертлюг споряджений давачем розвороту по азимуту та конструктивними |елементами припасовуваного контакту із визначальними частинами тіла оператора-навідника, при цьому обидва давачі разом із додатково введеним вузлом фіксації моментів візирування цілі ввімкнені до блока визначення кутів потрібного просторового положення вектора кидання.
2. Візуальна система по п. 1, яка відрізняється тим, що пристрій кріплення базових блоків на траверсі виконаний у вигляді чотирьохланкового шарнірного механізму, опорна ланка якого скріплена з вертлюгом, а ведуча ланка - з траверсою.
Текст
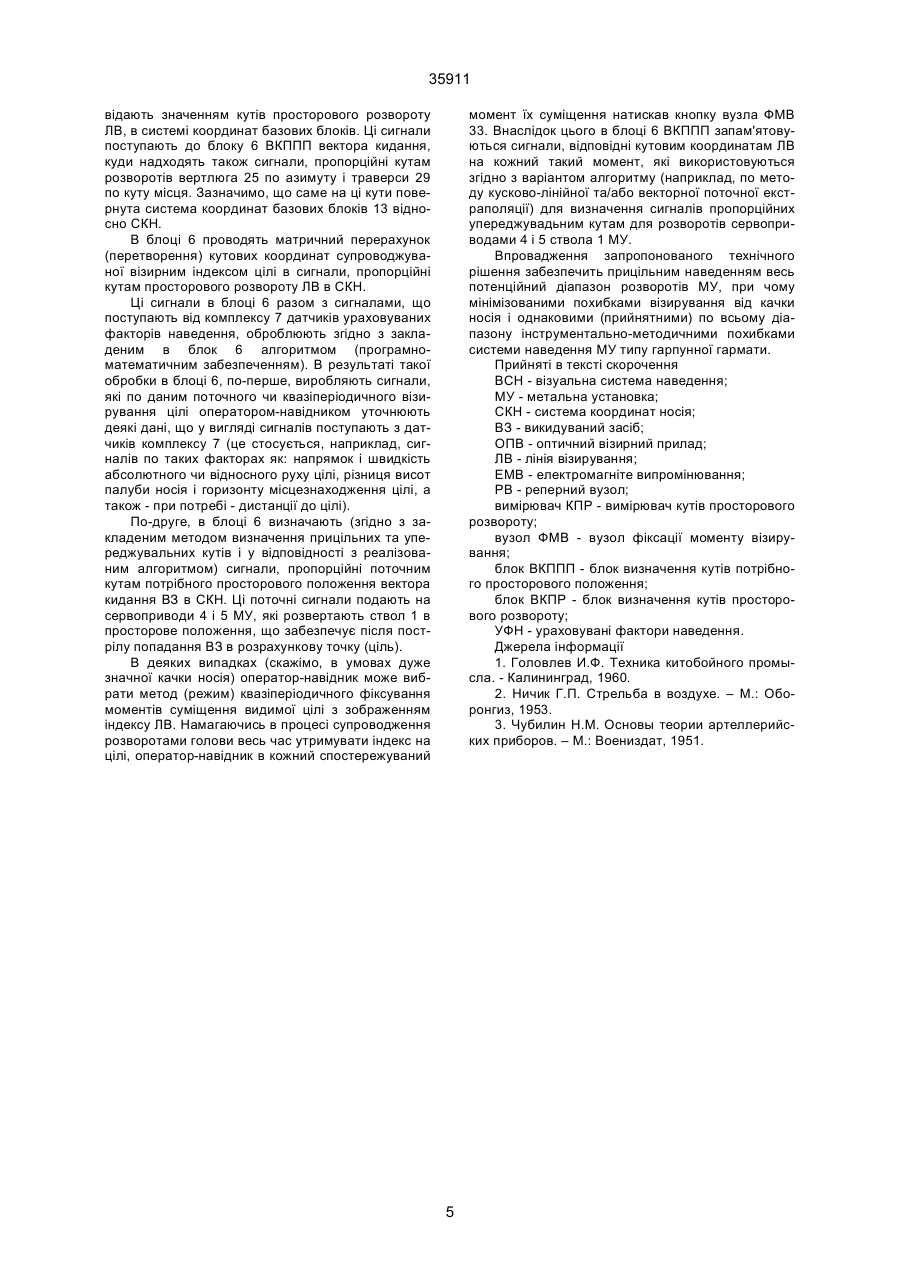
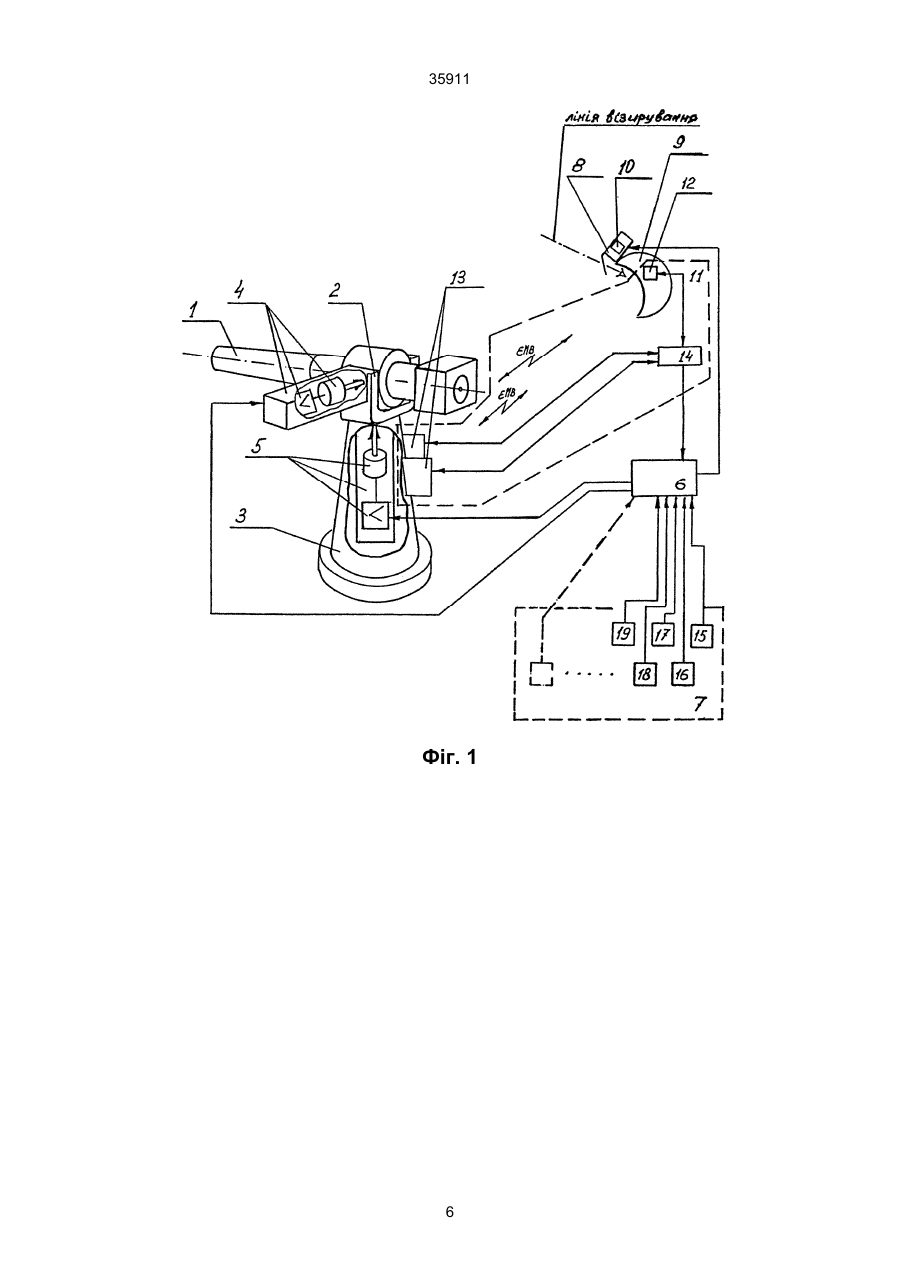
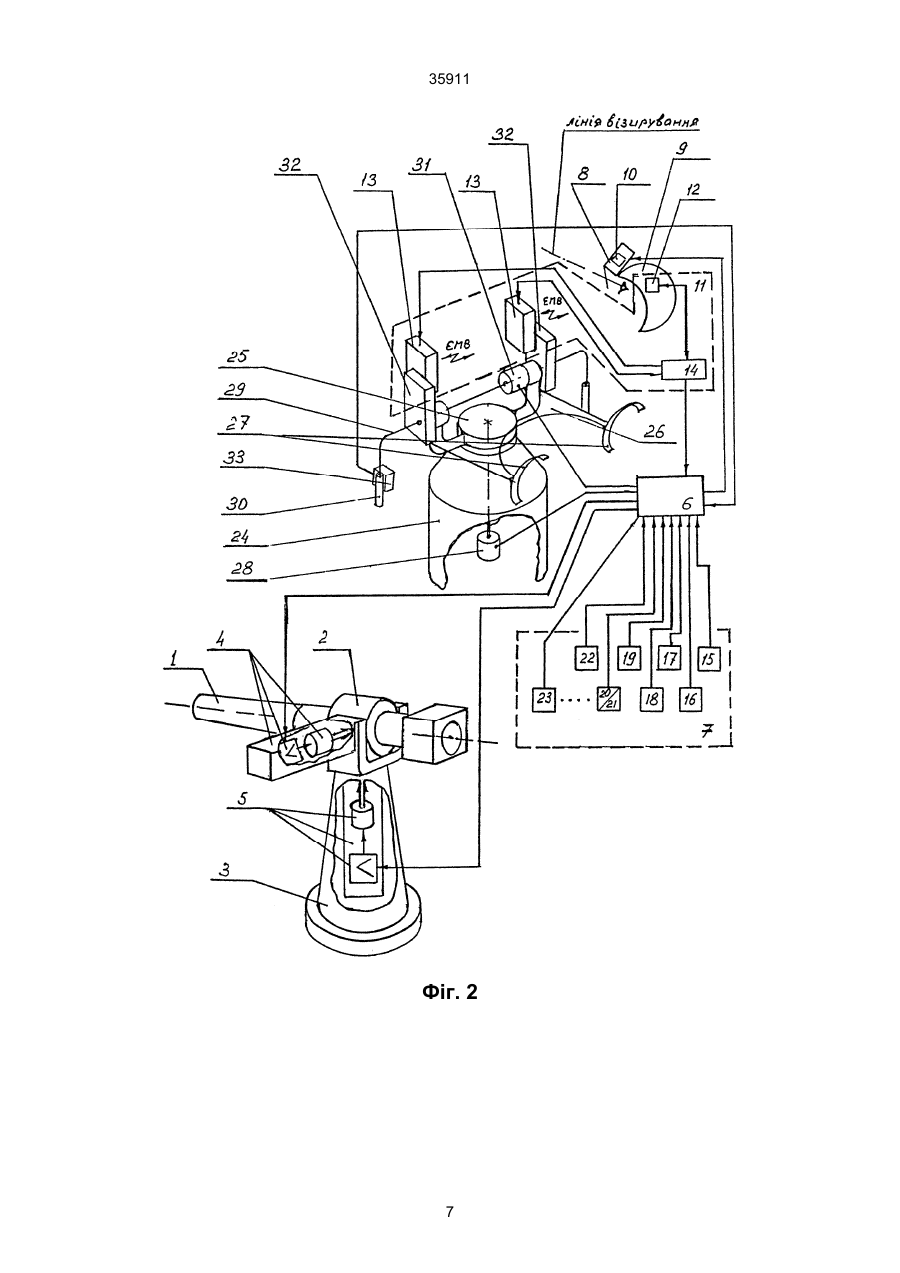
1. Візуальна система наведення метальної установки типу гарпунної гармати, що містить два сервоприводи розвороту метальної установки по азимуту і куту місця в системі координат носія, з'єднаний з ними блок визначення кутів потрібного просторового положення вектора кидання, до входів якого ввімкнений комплекс датчиків ураховуваних факторів наведення, включаючи датчик дистанції до цілі, і вимірювач кутів просторового розвороту лінії візирування, що складається з розміщеного на оголів'ї оператора-навідника реперного вузла, не менш, ніж одного базового блока і підключеного до них блока визначення кутів просторового розвороту лінії візирування, а також прицільний пристрій у вигляді встановленого на оголів'ї оптичного візирного приладу з формувачем зображення індексу лінії візирування, який підключе A (54) ВІЗУАЛЬНА СИСТЕМА НАВЕДЕННЯ МЕТАЛЬНОЇ УСТАНОВКИ ТИПУ ГАРПУННОЇ ГАРМАТИ 35911 що закріплений на штанзі, змонтованій на стаціонарній тумбового типу з можливістю двокоординатного розвороту в СКН і споряджений відповідними давачами, які безпосередньо або через певні функціональні агрегати підключені в контури сервоприводів МУ. При цьому штанга має рукоятки для ручного розвороту прицільного пристрою (по "азимуту" і "куту місця") і відповідні плечові упори дія утримання робочої пози оператора-навідника (що вкрай необхідне при качці корабля), а сама колонка з майданчиком-містком для нього, розташована на кораблі якомога вище - з метою забезпечення кращого огляду зовнішнього простору в секторах відповідальності. Відомі системи (апаратура) наведення (прицілювання) корабельних МУ типу гарпунної гармати мають істотні конструктивно-функціональні недоліки, які виявляються, по-перше, в недостатній точності візування цілей та наведення МУ і - як наслідок - в низький точності влучення ВЗ в визначену точку, і, по-друге, в обмежених кутових діапазонах візування та наведення. Найближчою за технічною суттю до запропонованого технічного рішення і вибраною як прототип в візуальна система наведення гарпунної гармати, яка представлена в матеріалах авторської заявки 96124666 (М. Кл.6 А01G15/00). Система-прототип містить (див. фіг. 1): ствол 1 гарпунної гармати (метальної установки), який змонтований у вертлюзі 2 на тумбі (лафеті) 3 корабля з можливістю двокоординатного розвороту в системі координат корабля-носія (СКН) і споряджений двома сервоприводами - по "куту місця" 4, і по "азимуту" 5; блок 6 визначення поточних значень кутів потрібного просторового положення (ВКППП) ствола 1 гарпунної гармати (тобто кутів потрібного просторового положення вектора кидання гарпуна-снаряда з МУ), виходи якого ввімкнені до сервоприводів 4 і 5; комплекс 7 датчиків ураховуваних факторів наведення виходи якого ввімкнені на входи блока 6; прицільний пристрій у вигляді оптичного візира (оптичного візирного приладу – ОВП) 8, який укріплений на оголів'ї 9 (наприклад, шоломі або касці) оператора-гарпунера (навідника) та яким включає вузол формування (або формувач) 10 зображення індексу лінії візирування (ЛВ) і ввімкнений до виходу блока 6; вимірювач 11 кутів просторового розвороту (КПР) ЛВ, сформованої в ОВП 8, який складається з укріпленого на оголів'ї 9 реперного вузла 1, одного або більше закріпленого в СКН (скажімо на лафеті 3 гарпунної гармати) базового блока 13 і блока 14 визначення просторового положення (тобто кутів просторового розвороту в СКН) ЛВ, виходи якого ввімкнені до реперного вузла (РВ) 12 і до базових блоків 13. В прототипі до комплексу 7 датчиків ураховуваних факторів наведення (УФН) входять: датчик дистанції до цілі 15, датчик напрямку і швидкості носія 16, датчик напрямку і швидкості абсолютного або відносного (відносно носія) руху цілі 17, датчик напрямку і швидкості діючого вітру 18, датчик аеродинамічних характеристик викидуваного засобу (ВЗ) - гарпуна-снаряда 19, а також датчики кутів крена, диферента та рискання (не показані на фіг. 1). Не показані також, але згадані в тексті опису прототипу, датчик різниці висот палуби носія, де встановлена МУ, і горизонту місцезнаходження цілі, датчик температури метального заряду, датчик щільності повітря і таке інше. Суттєвими недоліками системи-прототипу є: 1) недостатня точність візирування вибраної і спостережуваної (супроводжуваної у відносному русі) цілі (кита, аварійного судна і т. ін.), оскільки качка носія і коливання палуби, значуще впливають на процес поточного суміщення індексу ЛВ і видимої цілі, який виконується за рахунок розворотів голови і тулуба оператора-навідника та його переміщення біля (навколо) котельної установки. Качка та вібрації носія позначаються на якості поточного візирування віддаленої на значну дистанцію цілі внаслідок неврівноваженості пози людини в цих умовах та підвищеного тремору її кістковом'язового апарату. Все це спричиняється до значних коливань лінії візирування в певному конусі навколо лінії, що геометрично з'єднує око оператора-навідника та ціль, і призводить до зростання похибок вимірювання кутових координат цілі; 2) недостатність кутових діапазонів конусів візирування оскільки взаємодія за допомогою модульованих потоків електромагнітного випромінювання (ЕМВ), між базовими блоками і реперним вузлом вимірювача КПП ЛВ забезпечує прийнятну інструментальну точність вимірювання тільки при умові знаходження і кутової орієнтації РВ в певній зоні (об'ємі) по відношенню до розташованих на конструктивах носія базових блоків. Скажімо, для найбільш поширених електромагнітних вимірювачів (див., наприклад: пат. США 3.963.474 МКИ G01R33/02 або пат. США 4.014.251 МКИ G01S5/02) прийнятна точність забезпечується в кутовому конусі розворотів РВ близько 15+30° (без урахування впливу феромагнітних надбудов корабля) на віддаленні від базових блоків не більше 1 м, а для широко поширених вимірювачів оптикоелектронного типу (див. наприклад, а.с. СРСР 904666 МКИ А61В5/10, або пат. США 4.054.881 МКИ G01S3/02, або пат. США 4.343.384 МКИ G01S3/02) прийнятна точність вимірювання забезпечується в кутовому конусі розворотів РВ до 25+35° на відстанях від кожного з базових блоків не більше 0,6 м. Використання вимірювачів гірометричиого типу (див. пат. Великобританії 2.143.948A НКИ G1F1, МКИ G01C1/00) обмежено необхідністю періодичного списування накопичуваних похибок в визначені кутів розвороту РВ шляхом автоколімаційної вивірки на відстанях оголів'я від опорного конструктива носія не більше 0,5 м і в просторовій апертурі діаметром не більше 50-80 мм. Це призводить до відповідних обмежень в діапазонах вимірюваних кутів візирування спостережуваних цілей і - отже - до відчутних обмежень в кутах наведення МУ. В основу винаходу поставлені задачі підвищення точності вимірювання кутових координат візуально спостережуваної цілі в умовах качки і вібрацій носія, а також суттєвого розширення кутових діапазонів візирування цілей і, відповідно, наведення МУ. Для вирішення цих задач в візуальній системі наведення метальної установки типу гарпунної гармати, що містить: два сервоприводи розвороту метальної установки по азимуту і куту місця в сис 2 35911 темі координат носія, з'єднаний з ними блок визначення кутів потрібного просторового положення вектора кидання, який ввімкнений до комплексу датчиків ураховуваних факторів наведення, включаючи датчик дистанції до цілі (або точки метання) і до вимірювача кутів просторового розвороту лінії візирування, що складається з розміщеного на оголів'ї оператора-навідника реперного вузла, одного або більше базового блока і підключеного до них блока визначення кутів розвороту лінії візирування, а також прицільний пристрій у вигляді встановленого на оголів'ї оптичного візирного приладу з формувачем зображення індексу лінії візирування, кожний базовий блок вимірювача встановлений за допомогою пристрою кріплення на додатково введеній траверсі, яка розміщена з можливістю розвороту по куту місця у вертлюзі, що змонтований з можливістю розвороту по азимуту в опорному пристрої типу колонки-тумби на робочому майданчику оператора-навідника. При цьому траверса споряджена принаймні однією рукояткою і давачем розвороту по куту місцями вертлюг споряджений давачем розвороту по азимуту та конструктивними елементами припасовуваного контакту із визначальними частинами тіла операторанавідника, обидва давачі разом з додатково введеним вузлом фіксації моментів візирування цілі ввімкнені до блока визначення кутів потрібного просторового положення вектора кидання метальної установки. В варіанті технічного рішення запропонованої системи пристрій кріплення базових блоків на поворотній по куту місця траверсі 8 метою забезпечення оптимального (з точки зору мінімізації інструментальних похибок) розташування реперного вузла (РВ) по відношенню до місцезнаходження і орієнтації блоків, може бути виконаний у вигляді чотириланкового шарнірного механізму, опорна ланка якого скріплена з вертлюгом. Співставлення і аналіз технічної суті запропонованої візуальної системи наведення (ВСН) метальної установки (МУ) типу гарпунної гармати і системи прототипу свідчить про таке. А. Заявлена система відрізняється від прототипу наявністю: а) встановленого на робочому майданчику оператора-навідника в опорній колонці-тумбі поворотного по азимуту вертлюга, спорядженого давачем азимута і конструктивними елементами припасовуваного контакту із визначальними частинами тіла людини (тобто такими, що забезпечують належне утримання тіла людини від розхитування під час качки та вібрацій носія), наприклад, у вигляді плечових кронштейнів-упорів з подушками; б) розміщеної у вертлюзі з можливістю розвороту по куту місця траверси, яка споряджена однією чи двома рукоятками (для ручних розворотів по куту місця і по азимуту) і давачем кута місця; в) вузлом фіксації моментів візирування цілі (тобто моментів суміщення зображення індексу ЛВ і спостережуваної цілі). Крім того, вони відрізняються зв'язками і взаєморозташуванням існуючих і нововведених компонентів, а саме: базові блоки вимірювача кутів просторового розвороту (КПР) ЛВ встановлені за допомогою пристроїв кріплення на поворотній траверсі верт люга, що забезпечує відповідне переміщення і зміну орієнтації базових блоків по азимуту в СКН при зміні положення конуса спостереження і візирування відносно рухомої цілі. До того ж у варіанті запропонованого рішення конструкція пристрою кріплення кожного з базових блоків, забезпечує ці переміщення і орієнтацію їх по куту місця оптимальним чином з точки зору мінімізації інструментально-методичних похибок вимірювача КПР ЛВ; вузол фіксації моментів візирування (вузол ФМВ) і давачі кутів розвороту траверси (а значить і поточного положення базових блоків вимірювача в СКН) ввімкнені до блока визначення кутів потрібного просторового положення (блока ВКППП) вектора кидання МУ. Це все свідчить, що запропонована ВСН МУ є новим, раніше невідомим з технічної літератури схемотехнічним рішенням і характеризується новим складом, новими зв'язками і взаєморозташуванням, а також особливим виконанням окремих компонентів. Б. Відомі самі по собі нововведені компоненти та схемотехніка їх виконання. Наприклад, широко відомі пристрої двокоординатного просторового розвороту різних технічних засобів (скажімо тієї ж гарпунної гармати), що містять поворотний по азимуту вертлюг поворотною по куту місця люлькою (траверсою). Аналогічно побудовані різного роду спостережно-вимірювальні прилади, зокрема геодезичні (теодоліти, тахеометри) чи прожекторні установки. Введений в запропоновану ВСН МУ вузол ФМБ може бути виконаний у вигляді звичайного вмикача кнопочного типу, розташованого, скажімо, на рукоятці траверси. Таким чином, запропонована ВСН МУ є промислово реалізованою з точки зору відтворюваності як нововведених компонентів, так і зв'язків між всіма компонентами. В. Запропонована ВСН МУ забезпечує такі основні переваги порівняно з прототипом: 1) завдяки введенню до складу ВСН МУ опорної колонки-тумби з вертлюгом, що споряджений конструктивними елементами припасовуваного контакту із тілом оператора-навідника, скажімо, у вигляді плечових кронштейнів-упорів з подушками, забезпечено утримання тіла і голови людини від вимушеного розхитування під впливом качки і вібрацій носія, що дозволяє оператору-навіднику більш впевнено і плавно (із значно меншими вимушеними флуктуаціями) здійснювати візирування спостережуваної цілі розворотами голови з оголів'ям, на якому змонтовані ОВП і РЬ. За цих умов оператор-навідник здатний частіше забезпечувати і фіксувати моменти суміщення видимої крізь оптику ОВЦ цілі з зображенням індексу ЛБ. В підсумку це призводить до більшої точності візирування цілі оператором-навідником, тобто до вимірювання її відносних координат із суттєво меншими похибками прицілювання, ніж в прото типі; 2) завдяки закріпленню базових блоків вимірювача КПР ЛВ на поворотній по куту місця траверсі, яка змонтована в поворотному по азимуту вертлюзі, забезпечено "слідкуючі" переміщення їх відносно розворотів і переміщень РВ на оголів'ї оператора-навідника. Це призводить до оптиміза 3 35911 ції (з погляду мінімізації інструментальнометодичних похибок вимірювання КПР ЛВ) взаємодії між базовими блохами і РВ за допомогою модульованих потоків ЕПВ. Завдяки давачам розворотів по куту місця і по азимуту ці переміщення базових блоків коректно враховуються в блоці ВКППП. Оскільки в колонці-тумбі забезпечено розворот вертлюга по азимуту без обмежень (вкругову), а траверси з базовими блоками по куту місця відповідно до діапазону кутів нахилу голови оператора-навідника, то запропонована ВСН МУ забезпечує порівняно з прототипом значно більші діапазони кутів наведення МУ, обмеження для яких може мати місце лише за рахунок затінку від надбудов корабля-носія з точки розташування МУ. Таким чином, запропоноване технічне рішення створює беззаперечний позитивний ефект при його застосуванні і суттєво підвищує ефективність наведення МУ. Це свідчить про винахідницький рівень вирішення поставлених технічних задач. Отже, запропонована візуальна система наведення метальної установки типу гарпунної гармати відповідає всім необхідний критеріям патентоздатності. Викладена суть запропонованого технічного рішення "Візуальна система наведення метальної установки типу гарпунної гармати" пояснюється доданими кресленнями-ілюстраціями і нижче наведеним описом. На фіг. 1 зображена функціональноконструктивна схема системи-прототипу. На фіг. 2 представлена функціональноконструктивна схема запропонованої ВСН МУ. На фіг. 3 показано схематично варіант виконання пристрою кріплення базового блоку вимірювача КПР ЛВ на траверсі. Візуальна система наведення метальної установки містить (див. фіг. 2): ствол 1 (як пристрій для метання ВЗ) метальної установки, який змонтований у вертлюзі 2 на тумбі (лафеті) 3 носія з можливістю двокоординатного розвороту в СКН і споряджений відповідно двома сервоприводами - по "куту місця" 4 і по "азимуту" 5, кожний з яких складається із підсилювача і серводвигуна разом з давачем зворотного зв'язку; блок 6 ВК ППП ствола 1, точніше - вектора кидання (метання) ВЗ з МУ,- у якого виходи ввімкнені до сервоприводів 4 і 5; комплекс 7 датчиків ураховуваних факторів наведення (УФН), виходи якого ввімкнені на входи блока 6; прицільний пристрій у вигляді ОВП 8, який укріплений на оголів'ї 9 (наприклад, шоломі або касці) оператора-навідника КУ, та який включає формувач 10 зображення індексу ЛВ і ввімкнений до блока 6; вимірювач 11 КПР ЛВ, сформованої у вигляді індексу в ОВП 8, який складається з укріпленого на оголів'ї 9 РВ 12, одного або більше базових блоків 13 і блока 14 ВКПР ЛВ, входи якого ввімкнені до РВ 12 і до базових блоків 13, а виходи - до блока 6 ВКППП. До комплексу 7 датчиків ураховуваних факторів наведення входять: датчик дистанції до цілі 15; датчик напрямку і швидкості носія 16; датчик напрямку і швидкості абсолютного чи відносного (відносно носія) руху цілі 17; датчик напрямку і швидкості діючого вітру 18; датчик аеродинамічних характеристик ВЗ 19; датчики крену, диференту та курсу (рискання) 20, 21 і 22; датчик різниці висот палуби носія, де встановлена МУ і горизонту місцезнаходження цілі 23, а також інші датчики (в тому числі - температуру метального заряду, щільності повітря, параметрів технічного стану ствола, вектора бази містка оператора-навідника відносно МУ тощо); опорний пристрій у вигляді колонки-тумби 24, в якій змонтовано з можливістю розворотів по азимуту вертлюг 25, споряджений конструктивними елементами 26 припасовуваного контакту із визначальними частинами тіла операторанавідника, наприклад, у вигляді плечових кронштейнів-упорів з подушками 27. Вертлюг 25 споряджений також давачем кута азимутального розвороту 28; розміщену у вертлюзі 25 з можливістю розвороту по куту місця траверсу 29, яка споряджена принаймні однією рукояткою 30, давачем кута місця 31 і пристроями (вузлами) кріплення 32 базових блоків 13 із складу вимірювача 11 КПР ЛВ; вузол ФМВ 33, котрий може бути виконаний, наприклад, у вигляді кнопочного перемикача, встановленого біля рукоятки 30. Вузол ФМВ 33 та давачі 28 і 31 ввімкнені до входів блока 6 ВКППП, група входів якого з'єднана з виходами комплексу 7 датчиків УФН. В одному а конструктивних варіантів пристрій (вузол) кріплення 32 базового блоку 13 до траверси 29 може бути виконаний (див. фіг. 3) у вигляді чотириланкового шарнірного механізму, що складається з опорної ланки 34, яка прикріплена до вертлюга 25, ведучої поворотної ланки 35, яка скріплена а траверсою 29, несучої ланки 36, на якій власне і закріплено базовий блок 13, і допоміжної (штовхаючої) ланки 37. Запропонована візуальна система наведення (ВСН) метальної установки (МУ) функціонує таким чином. Оператор-навідник, оглядаючи навколишній простір, самостійно чи по цілевказуванню зовні виявляє ціль, скажімо, кита на водній поверхні, і за допомогою конструктивних елементів припасовуваного контакту 26, наприклад, плечових кронштейнів-упорів з подушками 27, і за допомогою рукоятки 30 розвертає вертлюг 25 з траверсою 29 так, щоб виявлена і спостережувана ціль опинилась в секторі поміж базовими блоками 13, які при такому розвороті зайняли оптимальне (з погляду точності вимірювання кутів просторового розвороту ЛВ) розташування по відношенню РВ 12, встановленого на оголів'ї 9 разом з ОВП 8. Розворотами голови з оголів'ям (шоломом) 9 операторнавідник починає візирувати спостережувану крізь оптику ОВП 8 ціль, тобто намагається якомога точніше супроводжувати ціль зображенням індексу ЛВ, сформованим формувачем 10 ОВП 8, добиваючись суміщення індексу і цілі. Оскільки РВ 12 на оголів'ї фіксовано орієнтований по відношенню ЛВ ОВП 8, то кути розвороту РВ 12 відповідають кутам просторового розвороту ЛВ в системі координат базових блоків 13. Поточна (в реальному масштабі часу) обробка в блоці ВКПР 14 вимірювача КПР 11 сигналів, що генеруються в базових блоках 13 внаслідок взаємодії з РВ 12 за допомогою модульованих потоків ЕМВ, призводить до появи на виході його (тобто на виході вимірювача КПР 11) сигналів, що відпо 4 35911 відають значенням кутів просторового розвороту ЛВ, в системі координат базових блоків. Ці сигнали поступають до блоку 6 ВКППП вектора кидання, куди надходять також сигнали, пропорційні кутам розворотів вертлюга 25 по азимуту і траверси 29 по куту місця. Зазначимо, що саме на ці кути повернута система координат базових блоків 13 відносно СКН. В блоці 6 проводять матричний перерахунок (перетворення) кутових координат супроводжуваної візирним індексом цілі в сигнали, пропорційні кутам просторового розвороту ЛВ в СКН. Ці сигнали в блоці 6 разом з сигналами, що поступають від комплексу 7 датчиків ураховуваних факторів наведення, оброблюють згідно з закладеним в блок 6 алгоритмом (програмноматематичним забезпеченням). В результаті такої обробки в блоці 6, по-перше, виробляють сигнали, які по даним поточного чи квазіперіодичного візирування цілі оператором-навідником уточнюють деякі дані, що у вигляді сигналів поступають з датчиків комплексу 7 (це стосується, наприклад, сигналів по таких факторах як: напрямок і швидкість абсолютного чи відносного руху цілі, різниця висот палуби носія і горизонту місцезнаходження цілі, а також - при потребі - дистанції до цілі). По-друге, в блоці 6 визначають (згідно з закладеним методом визначення прицільних та упереджувальних кутів і у відповідності з реалізованим алгоритмом) сигнали, пропорційні поточним кутам потрібного просторового положення вектора кидання ВЗ в СКН. Ці поточні сигнали подають на сервоприводи 4 і 5 МУ, які розвертають ствол 1 в просторове положення, що забезпечує після пострілу попадання ВЗ в розрахункову точку (ціль). В деяких випадках (скажімо, в умовах дуже значної качки носія) оператор-навідник може вибрати метод (режим) квазіперіодичного фіксування моментів суміщення видимої цілі з зображенням індексу ЛВ. Намагаючись в процесі супроводження розворотами голови весь час утримувати індекс на цілі, оператор-навідник в кожний спостережуваний момент їх суміщення натискав кнопку вузла ФМВ 33. Внаслідок цього в блоці 6 ВКППП запам'ятовуються сигнали, відповідні кутовим координатам ЛВ на кожний такий момент, які використовуються згідно з варіантом алгоритму (наприклад, по методу кусково-лінійної та/або векторної поточної екстраполяції) для визначення сигналів пропорційних упереджувадьним кутам для розворотів сервоприводами 4 і 5 ствола 1 МУ. Впровадження запропонованого технічного рішення забезпечить прицільним наведенням весь потенційний діапазон розворотів МУ, при чому мінімізованими похибками візирування від качки носія і однаковими (прийнятними) по всьому діапазону інструментально-методичними похибками системи наведення МУ типу гарпунної гармати. Прийняті в тексті скорочення ВСН - візуальна система наведення; МУ - метальна установка; СКН - система координат носія; ВЗ - викидуваний засіб; ОПВ - оптичний візирний прилад; ЛВ - лінія візирування; ЕМВ - електромагніте випромінювання; РВ - реперний вузол; вимірювач КПР - вимірювач кутів просторового розвороту; вузол ФМВ - вузол фіксації моменту візирування; блок ВКППП - блок визначення кутів потрібного просторового положення; блок ВКПР - блок визначення кутів просторового розвороту; УФН - ураховувані фактори наведення. Джерела інформації 1. Головлев И.Ф. Техника китобойного промысла. - Калининград, 1960. 2. Ничик Г.П. Стрельба в воздухе. – М.: Оборонгиз, 1953. 3. Чубилин Н.М. Основы теории артеллерийских приборов. – М.: Воениздат, 1951. 5 35911 Фіг. 1 6 35911 Фіг. 2 7 35911 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 8
ДивитисяДодаткова інформація
Назва патенту англійськоюVisual aiming system of missile unit of harpoon gun type
Автори англійськоюBorysiuk Anatolii Oleksiiovych
Назва патенту російськоюВизуальная система наведения метательной установки типа гарпунной пушки
Автори російськоюБорисюк Анатолий Алексеевич
МПК / Мітки
МПК: G01S 5/00, F41B 13/00
Мітки: типу, установки, гарпунної, метальної, візуальна, система, наведення, гармати
Код посилання
<a href="https://ua.patents.su/8-35911-vizualna-sistema-navedennya-metalno-ustanovki-tipu-garpunno-garmati.html" target="_blank" rel="follow" title="База патентів України">Візуальна система наведення метальної установки типу гарпунної гармати</a>
Спосіб та пристрій прицілювання ствольної метальної установки, що наводиться вручну, типу линемета
Номер патенту: 28431
Опубліковано: 16.10.2000
Автор: Борисюк Анатолій Олексійович
Мітки: метальної, наводиться, пристрій, установки, прицілювання, ствольної, вручну, линемета, спосіб, типу
Формула / Реферат:
Способ прицеливания наводимой вручную ствольной метательной установки типа линемета, в процессе которого наблюдают объект, куда намереваются забросить груз, например, ракету с линем, учитывают влияние действующего ветра, определяют значения необходимых угловых поправок, оценивают текущее пространственное положение индекса линии ствола, формируемого прицельный приспособлением и связываемого по положению со стволом установки, вручную...
Установка наведення на сонце сонячних перетворювачів та механізм приведення в рух установки
Номер патенту: 26588
Опубліковано: 11.10.1999
Автор: Бергер Олександр Едуардович
МПК: F16H 33/00, F24J 2/38, F24J 2/00
Мітки: наведення, приведення, установки, сонце, перетворювачів, установка, рух, механізм, сонячних
Формула / Реферат:
1. Установка наведения на солнце солнечных преобразователей, содержащая по меньшей мере два механизма приведения в движение установки наведения, приводящих в движение устройства прикладной солнечной техники (солнечные преобразователи) в зависимости от положения солнца, отличающаяся тем, что механизмы приведения соединены друг с другом через гидравлическую или пневматическую прямую силовую передачу таким образом, что если солнечный...
Система віброзбудження вібраційної установки
Номер патенту: 712
Опубліковано: 15.02.2001
Автор: Симонюк Володимир Павлович
МПК: B06B 1/18, B24B 31/06
Мітки: вібраційної, установки, система, віброзбудження
Формула / Реферат:
Система віброзбудження вібраційної установки, яка містить встановлений з можливістю реверсивного обертання горизонтальний стіл, а також обладнаний вушками і змонтований на напрямних робочий контейнер та електромагнітний привід, яка відрізняється тим, що робочий контейнер з'єднаний з вушками шарнірно, а електромагніти приводу розташовані еквідистантно по периметру робочого контейнера та симетрично напрямним, при цьому кількість електромагнітів...
Паливна система газотурбінної установки
Номер патенту: 7408
Опубліковано: 29.09.1995
Автори: Каштан Василь Степанович, Марченко Анатолій Іванович, Зайцев Павло Васильович, Алєксєєв Анатолій Васильович, Нікішин Валентин Іванович, Патурянц Амаяк Бахшиєвич, Будко Валентин Федорович
МПК: F02C 7/22
Мітки: установки, система, газотурбінної, паливна
Формула / Реферат:
1. Топливная система газотурбинной установки, содержащая бак жидкого топлива, связанный с магистральным газопроводом и при помощи трубопровода с установленным на нем газификатором с форсунками, и подогреватель газа, отличающаяся тем, что, с целью повышения экономичности путем частичной замены топливного газа газифицируемым конденсатом из магистрального газопровода, она снабжена подогревателем жидкого топлива, установленным на...
Система автоматичного сервомоторного регулювання швидкості вихідного вала теплової силової установки
Номер патенту: 21759
Опубліковано: 30.04.1998
Автор: Музичук Федір Максимович
МПК: G05D 13/00
Мітки: сервомоторного, установки, регулювання, швидкості, теплової, силової, вала, автоматичного, вихідного, система
Формула / Реферат:
Система автоматического сервомоторного регулирования скорости выходного вала тепловой силовой установки, содержащая кинематически связанный с выходным валом, снабженный подпружиненной муфтой центробежный измеритель отклонения скорости выходного вала относительно заданного настроечным устройством значения, находящийся под управляющим воздействием отсечного золотника гидравлический поршневой сервомотор, силовой шток которого кинематически...
Попередній патент: Біомеханічний стимулятор хребта космонавта
Наступний патент: Спосіб лікування виразкової хвороби шлунку та дванадцятипалої кишки
Випадковий патент: Спосіб одержання мемантину і його гідрохлориду