Спосіб визначення в’язкості
Номер патенту: 45078
Опубліковано: 15.03.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
Формула / Реферат
Спосіб визначення в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, збуджують коливання зонда і виміряють при цьому амплітуду коливань зонда, який відрізняється тим, що попередньо змінюють температуру досліджуваного середовища до стандартної температури 20 °С, при досяганні досліджуваним середовищем стандартної температури 20 °С збуджують коливання зонда з власною частотою, вимірюють частоту власних коливань зонда, вимірюють водночас з вимірюванням частоти власних коливань амплітуду коливань зонда, а величину в'язкості досліджуваного середовища визначають за значеннями частоти і амплітуди власних коливань зонда.
Текст
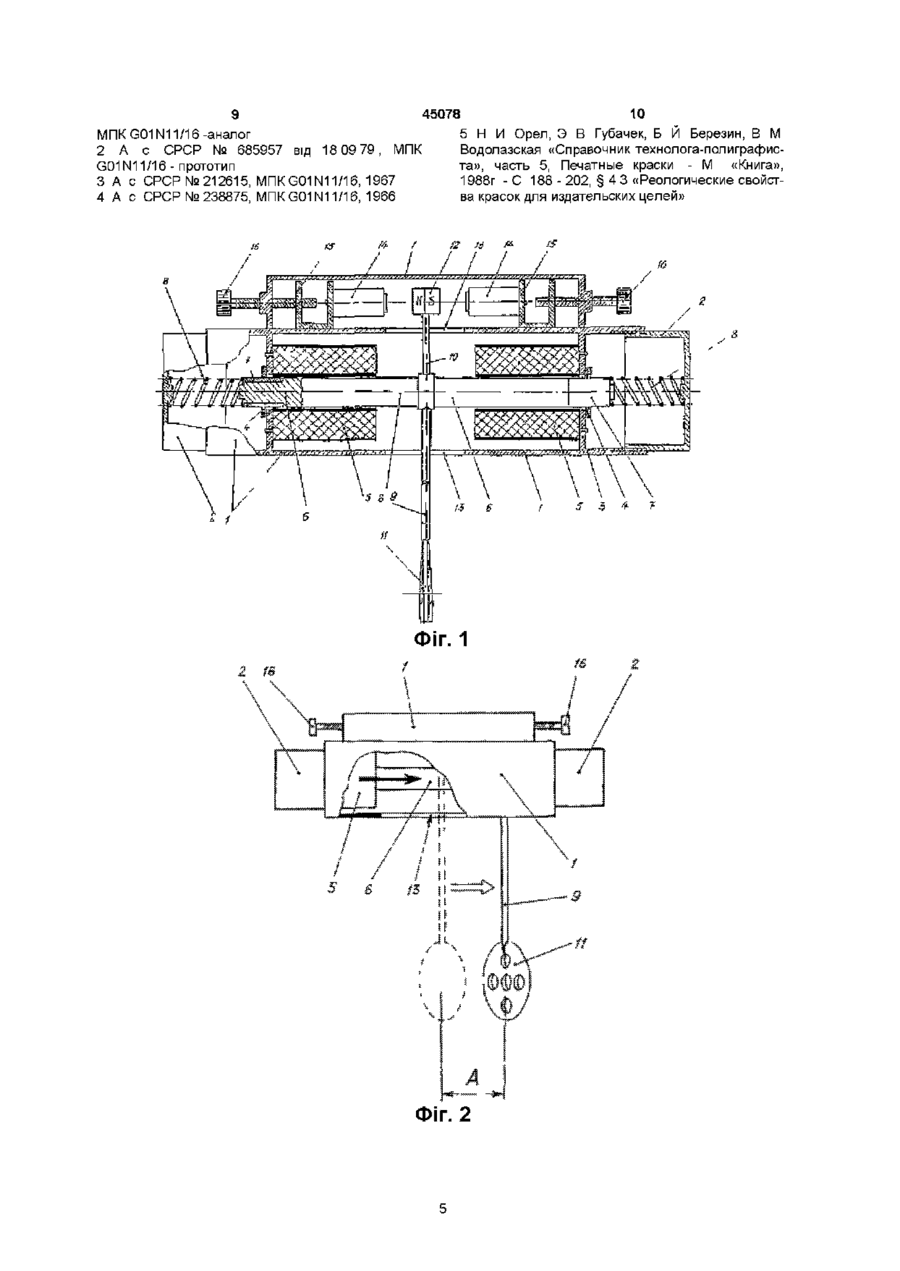
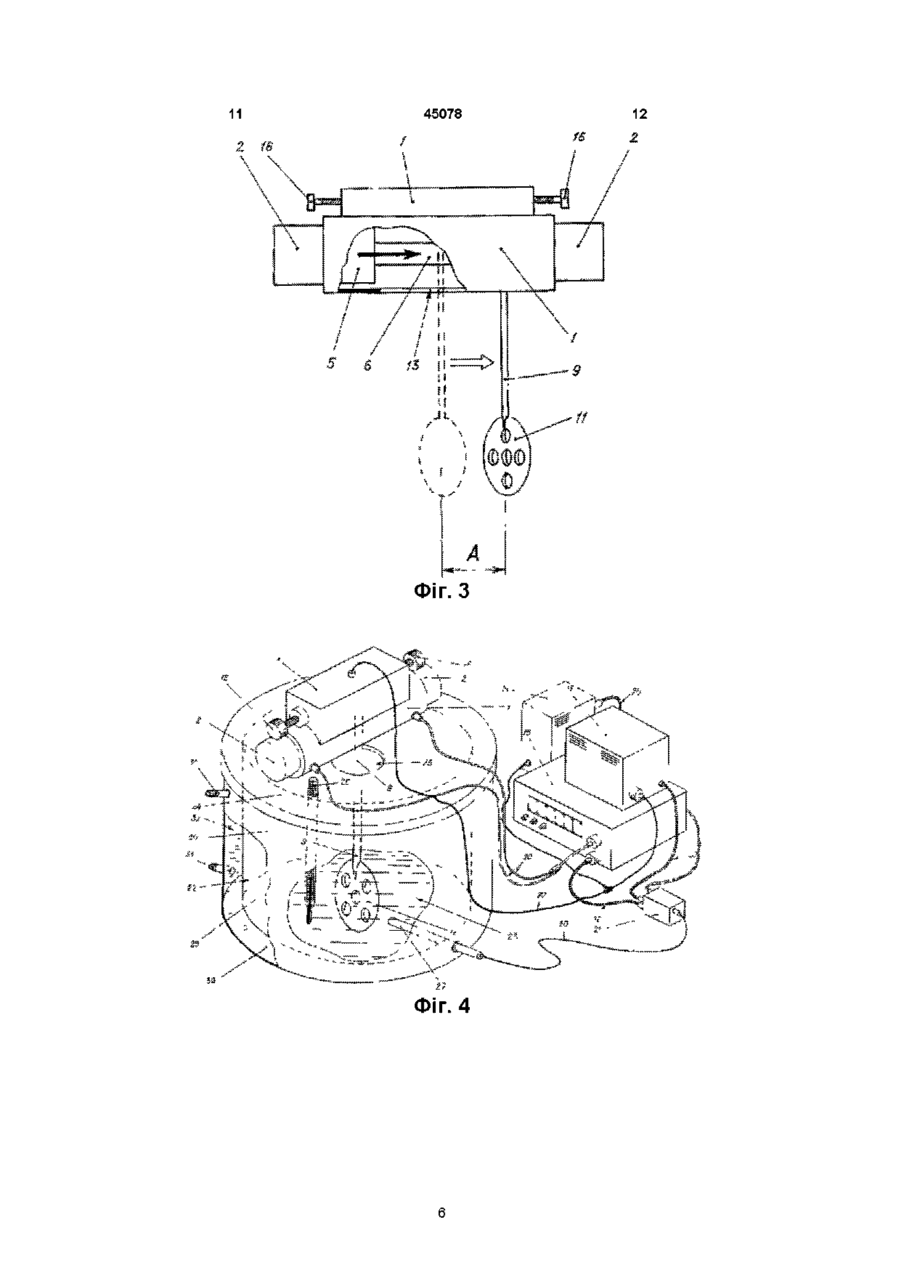
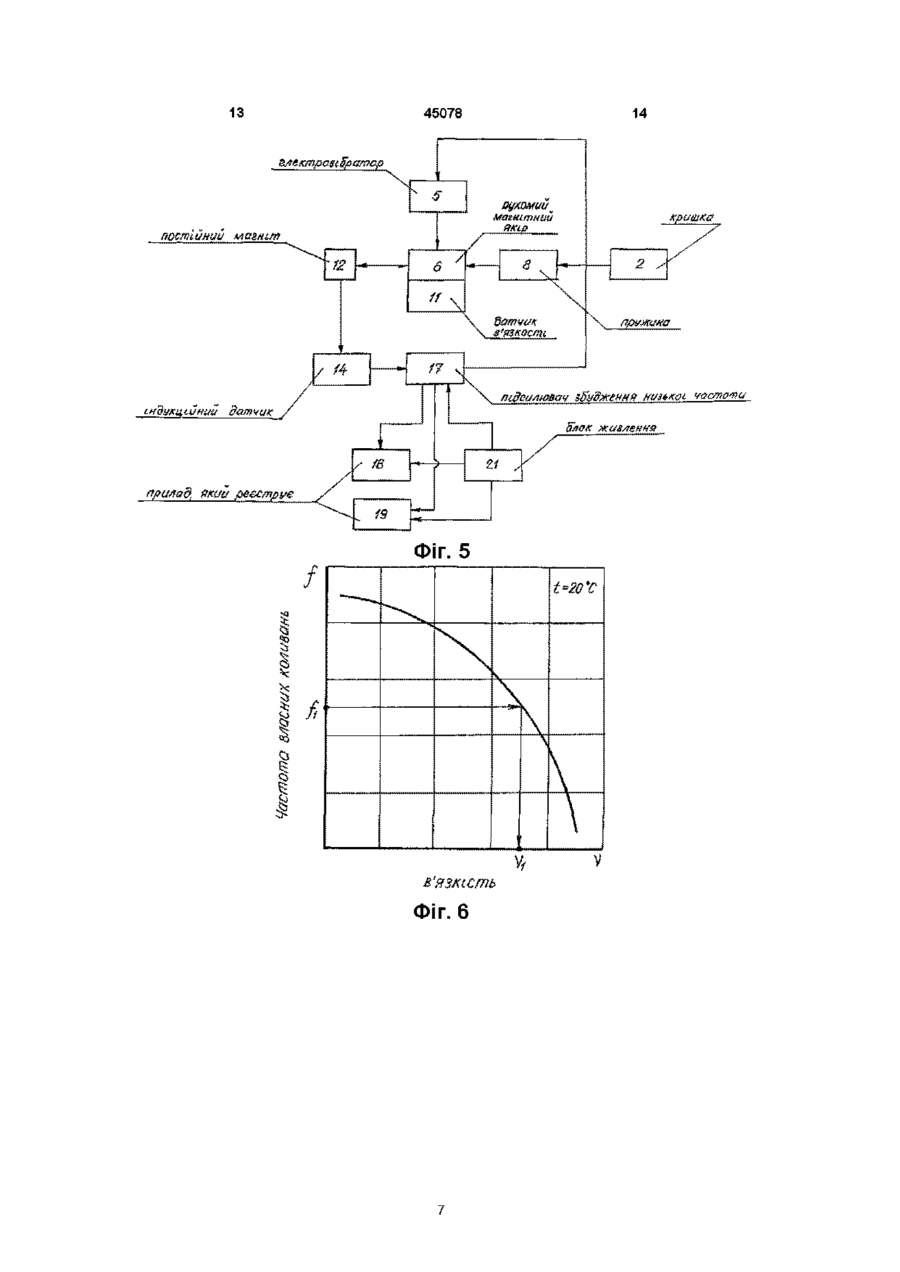
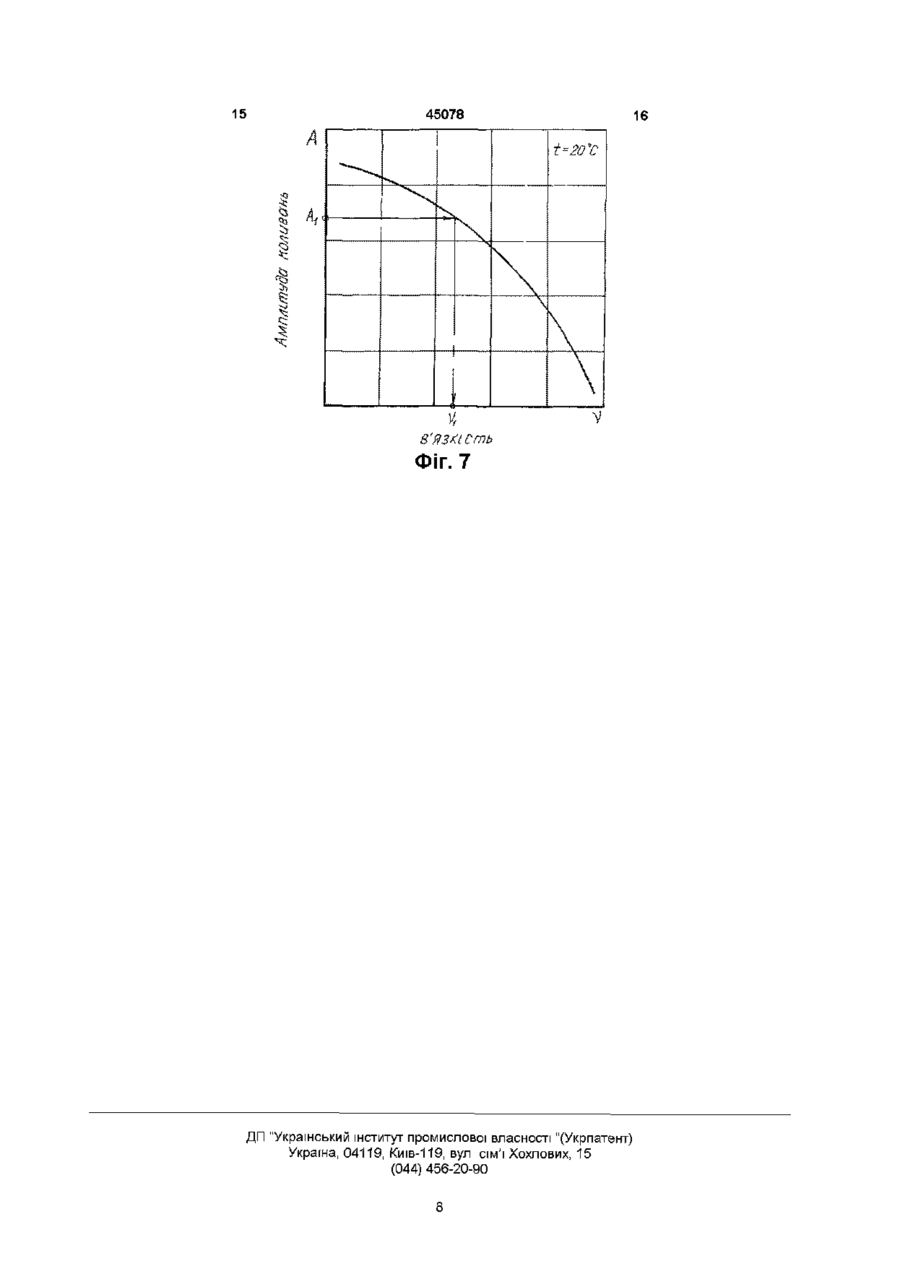
Спосіб визначення в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, збуджують коливання зонда і виміряють при цьому амплггуду коливань зонда, який відрізняється тим, що попередньо змінюють температуру досліджуваного середовища до стандартної температури 20 °С, при досяганні досліджуваним середовищем стандартної температури 20 °С збуджують коливання зонда з власною частотою, вимірюють частоту власних коливань зонда, вимірюють водночас з вимірюванням частоти власних коливань амплггуду коливань зонда, а величину в'язкості досліджуваного середовища визначають за значеннями частоти і амплггуди власних коливань зонда Винахід відноситься до області визначення в'язкості, зокрема, до приладів для виміру в'язкості, а саме, до способів визначення в'язкості рідких речовин, і може застосовуватися в системах контролю й автоматичного регулювання в'язкості, наприклад, у поліграфічній, нафтохімічній та інших галузях промисловості Відомий спосіб визначення в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, збуджують коливання зонда, і за зміною параметрів коливальної системи, яка зв'язана з величиною в'язкості рідких речовин, визначають її значення [1] Недоліками відомого способу визначення в'язкості є складність системи виміру амплггуд коливань зонда При цьому зміни амплггуди коливань зонда практично не відбувається, оскільки за допомогою відомої системи збудження коливань, виконаної у вигляді генератора частоти, що задає коливання, збуджують змушені коливання зонда з частотою, що задається У зв'язку з цим неможливо встановити залежність амплггуди коливань від в'язкості досліджуваного середовища Можлива для виміру зміна амплггуди коливань відбувається тільки в середовищі з великими значеннями в'язкості, наприклад, у смолах, фарбах, нафтопродуктах До недоліків відомого способу визначення в'язкості можна віднести й те, що вимірювання и значень проводять при різних температурах досліджуваного середовища, а в'язкість його визначають в лабораторних умовах при стандартній температурі 20°С Недооцінка температурного фактора буде призводити до накопичування похибок при визначенні фактичної величини в'язкості досліджуваного середовища Найбільш близьким технічним рішенням, обраним за прототип, є спосіб визначення в'язкості, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, збуджують коливання зонда і заміряють при цьому амплггуду коливань зонда [2] Недоліками відомого способу визначення в'язкості, обраного за прототип, є складність системи вимірювання амплггуд коливань зонда При цьому зміни амплггуди коливань зонда практично не відбувається, оскільки за допомогою відомої системи збудження коливань, виконаної у вигляді генератора частоти, що задає коливання, збуджують змушені коливання зонда із частотою, що задається У зв'язку з цим неможливо встановити залежність амплггуди коливань від в'язкості досліджуваного середовища Можлива для виміру зміна амплггуди коливань відбувається тільки в середовищі з великою величиною в'язкості, наприклад, у смолах, фарбах або інших нафтопродуктах До того ж, недоліками відомого способу визначення в'язкості є й те, що вимірювання значень проводять при різних температурах досліджуваного середовища, а в'язкість його визначають в лабораторних умовах при стандартній температурі 20°С Недооцінка температурного 00 о ю 45078 фактора у зазначеному способі визначення в'язколад, який реєструє частоту власних коливань, мості буде призводити до накопичування похибки при же бути використаний електронно-лічильний часвизначенні фактичної величини в'язкості досліджутотомір Як прилад, який реєструє амплггуду коливаного середовища вань, може бути використаний реєстратор ЛІНІЙНИХ В основу винаходу поставлена задача шляхом переміщень зонда При цьому зонд і електровібраурахування температурного фактору забезпечити тори включені у частотно-вибіркову ланку системи підвищення достовірності визначення величини збудження коливань, що реагують на зміну в'язков'язкості досліджуваного середовища сті середовища, у якому занурений зонд Суть винаходу у способі визначення в'язкості, Попередньо проводять тарування вібраційного при якому проводять занурення чутливого елеменвіскозиметра за еталонними значеннями величин та, виконаного у вигляді зонда, у досліджуване сев'язкості v матеріалу (речовини), що отримані за редовище, збуджують коливання зонда і вимірюдопомогою інших відомих методів контролю, опиють при цьому амплггуду коливань зонда, досягасаних, наприклад, у [5] Для цього приводять темється тим, що попередньо змінюють температуру пературу t досліджуваного середовища до стандадосліджуваного середовища до стандартної темртної температури, яка дорівнює 20°С, збуджують ператури 20°С, при досяганні досліджуваним сереколивання датчика в'язкості з власною частотою і довищем стандартної температури 20°С збуджуприводять до ВІДПОВІДНОСТІ частоту f і амплггуду А ють коливання зонда з власною частотою, вимірювласних коливань датчика в'язкості з в'язкістю v ють частоту власних коливань зонда, вимірюють матеріалу (речовини) для кожного з численних доводночас з вимірюванім частоти власних коливань сліджуваних матеріалів (речовин) За одержаними амплггуду коливань зонду, а величину в'язкості доунаслідок контролю значеннями частоти f і амплісліджуваного середовища визначають за значентуди А власних коливань і відомих величин в'язконями частоти і амплггуди власних коливань зонда сті v матеріалу (речовини) при стандартній температурі досліджуваного середовища 20°С, будують Порівняльний аналіз технічного рішення, що графіки залежності частоти f і амплггуди А власних заявляється, з прототипом, дозволяє зробити виколивань датчика в'язкості від в'язкості v матеріасновок, що спосіб визначення в'язкості, що заявлялу (речовини) та температури t (див фіг 6 і фіг 7) ється, відрізняється тим, що попередньо змінюють ВІДПОВІДНО ДО графіка залежності f = f (v, t), кожнотемпературу досліджуваного середовища до станму із значень f частоти власних коливань датчика дартної температури 20°С, при досяганні дослів'язкості буде відповідати визначене значення v джуваним середовищем стандартної температури в'язкості матеріалу (речовини)(див фіг 6) ВІДПОВІ20°С збуджують коливання зонда з власною частоДНО до графіка залежності А = f (v, t), кожному із тою, вимірюють частоту власних коливань зонду, значень амплггуди А власних коливань датчика вимірюють водночас з вимірюваням частоти власв'язкості буде відповідати визначене значення в'яних коливань амплггуду коливань зонду, а величизкості v матеріалу (речовини) (див фіг 7) ну в'язкості досліджуваного середовища визначають за значеннями частоти і амплітуди власних коливань зонда Таким чином, спосіб визначення в'язкості, що заявляється, відповідає критерію винаходу «новизна» Суть способу визначення в'язкості рідких речовин поясняется за допомогою креслень, де на фіг 1 наведено конструктивно-компонувальну схему приладу, за допомогою якого проводять визначення в'язкості досліджуваного середовища, на фіг 2, 3 наведені схеми роботи зонда, ВІДПОВІДНО, у першому і другому півперюдах його коливань, на фіг 4 наведено схему обладнання, за допомогою якого проводять визначення в'язкості, на фіг 5 наведена блок-схема приладу, за допомогою якого проводять визначення в'язкості, на фіг 6, 7 наведені, ВІДПОВІДНО, залежності частоти власних коливань f і амплггуди А коливань зонда від в'язкості v досліджуваного середовища та його температури t Суть способу визначення в'язкості рідких речовин пояснюється за допомогою устатковання для цієї мети, наприклад, вібродатчика в'язкості, конструкція якого описана у [3], [4], або за допомогою інших приладів Кожний з вищезазначених приладів містить зонд, закріплений з можливістю вчинення маятникових коливань, і систему збудження коливань зонда, що містить електровібратори, індукційні датчики, магніт, закріплений на зонді з можливістю взаємодії з індукційними датчиками, підсилювач низькочастотних коливань і прилад, який реєструє частоту та амплггуду коливань Як при Маючи тарувальний графік залежності частоти f власних коливань і амплггуди А власних коливань датчика в'язкості від в'язкості v матеріалу (речовини) та температури t, приступають до досліджень з використанням приладу, за допомогою якого проводились контрольні вимірювання частоти власних коливань f і амплггуди А власних коливань датчика в'язкості Для пояснення суті винаходу вибране устатковання, наприклад, у вигляді вібродатчика в'язкості, який містить, як варіант конструкції (див фіг 1), корпус 1 з торцевими кришками 2 і внутрішніми перегородками 3, до яких кріпляться підшипники ковзання 4, які виконані, наприклад, з фторопласту (матеріалу, що володіє одним з найменших коефіцієнтів тертя), і електровібратори 5, які виконані, наприклад, у вигляді електромагнггних котушок Усередині електровібраторів 5 (усередині електромагнітних котушок) проходить рухомий магнггний якір 6, що конструктивно виконаний двополюсним На торцях рухомого магнітного якоря 6 закріплені жорстко втулки 7, які виконані, наприклад, із бронзи з полірованою зовнішньою поверхнею У торці кришок 2 і магнітного якоря 6 упираються пружини 8, які повинні мати однакові характеристики жорсткості На рухомому магнггному якорі 6 (у його геометричній середині) закріплені кронштейни 9 і 10 На вільному КІНЦІ кронштейна 9 закріплений робочий орган 11 датчика в'язкості, а на кронштейні 10 - постійний магніт 12 (N/S) Кронштейни 9 і 10 проходять крізь прорізи 13, що виконані у корпусі 1 Ін 45078 дукційні датчики 14 закріплені на рухомих основах у досліджуваний матеріал (речовину) 23, що зна15 (як варіант конструктивного виконання) Переміходиться у ємності 22, і нагрівають досліджуваний щення рухомих основ 15 із закріпленими на них інматеріал 23 до відповідної температури t = 20°С дукційними датчиками 14 відносно постійного магАбо для нагрівання досліджуваного матеріалу (ріднггу 12 провадиться за допомогою регулювальних кої речовини) 23 використовують метод пропускангвинтів 16 (як варіант конструктивного виконання) ня нагрітої речовини, наприклад, газу або води Збудження коливань датчика в'язкості з робочим (позиція 32), крізь внутрішню порожнину ЗО (яка органом 11 проводиться за допомогою подачі живстворена базовою стінкою 28 корпуса ємності 22 лення з підсилювача збудження низької частоти 17 та додатковою зовнішньою стінкою 29) ємності 22 на електровібратори 5 До схеми виміру вихідного Якщо температура досліджуваного матеріалу (рідсигналу датчика в'язкості входять прилади 18 і 19, кої речовини) 23 більше 20°С, то для охолодження що реєструють Як прилад 18, який реєструє часдосліджуваного матеріалу (рідкої речовини) 23 витоту f власних коливань, може бути використаний користовують метод пропускання холодної речоелектронно-лічильний частотомір (див поз 18 на вини, наприклад, газу або води (позиція 32), крізь фіг 4) Як прилад 19, який реєструє амплггуду А зазначену внутрішню порожнину ЗО ємності 22 коливань, може бути використаний реєстратор ЛІВодночас з приведенням досліджуваного маНІЙНИХ переміщень зонда Прилад 18, який реєсттеріалу (наприклад, рідкої речовини) 23 до стандарує частоту f власних коливань зонда, виконаний ртної температури 20°С, вібродатчик в'язкості сполученим за допомогою електричних ланцюгів установлюють на кришці 24, що закриває ємність 20 з джерелом живлення 21 і електровібратором 5 22 з досліджуваним матеріалом 23, так, щоб кронПрилад 19, який реєструє амплггуду А коливань штейн 9 із закріпленим на ньому робочим органом зонда, також виконаний сполученим з джерелом 11 проходив в отвір 25 на згаданій кришці 24 Ележивлення 21 і електровібратором 5 електричними ктричні ланцюги 20 від індукційних датчиків 14 і ланцюгами 20 При цьому виходи індукційних дателектровібраторів 5 вібраційного віскозиметра чиків 14 виконані сполученими з підсилювачем з'єднують з входами, ВІДПОВІДНО, підсилювача збузбудження 17, а виходи зазначеного підсилювача дження низької частоти 17 і приладів 18 та 19, які збудження 1 7 - з електровібратором 5, джерелом реєструють (ВІДПОВІДНО, ІЗ входами електронно-ліживлення 21 і приладом 18 (реєстратором частоти чильного частотоміра і реєстратора ЛІНІЙНИХ переf власних коливань зонда) електричними ланцюгаміщень зонда) Виходи підсилювача збудження ними 20 (див фіг 4, 5) зької частоти 17 та приладів 18 і 19, що реєструДля проведення досліджень додатково використовують ємність 22 для досліджуваного матеріалу (рідкої речовини) 23 Як варіант конструкції ємність 22 виконують у вигляді циліндра з закритою нижньою частиною Ємність 22 конструктивно може містити кришку 24 з отвором 25 для проходження кронштейну 9 із закріпленим на ньому робочим органом 11 Усередині корпуса ємності 22 встановлюють термометр 26 та нагрівальний елемент 27 Корпус 28 ємності 22 додатково постачають зовнішньою стінкою 29, яку встановлюють на відстані від базової стінки корпуса 28 При цьому конструктивно виконують порожнину ЗО, яка утворюється базовою стінкою корпуса 28 і додатковою зовнішньою стінкою 29, герметично закритою Для підведення у внутрішню порожнину ЗО охолодженої або нагргтої речовини, наприклад, води, азоту, пари, на додатковій ЗОВНІШНІЙ СТІНЦІ 29 встановлюють патрубки 31 для підведення зазначеної охолодженої або нагргтої речовини (позиція 32) Виходи нагрівального елементу 27 з'єднують з джерелом живлення 21 за допомогою електричного ланцюга 20 Для визначення в'язкості досліджуваного матеріалу вібродатчик в'язкості працює таким чином Перед початком досліджень заповнюють ємність 22 досліджуваним матеріалом (рідкою речовиною) 23 до визначеного рівня і закривають кришкою 24 Проводять замір температури досліджуваного матеріалу 23, наприклад, за допомогою термометра 26 Якщо температура досліджуваного матеріалу (рідкої речовини) 23 не відповідає стандартній, а саме, 20°С, то її приводять у ВІДПОВІДНІСТЬ до стандартної температури t = 20°С Наприклад, якщо температура досліджуваного матеріалу (рідкої речовини) 23 менше ніж 20°С, то вмикають нагрівальний елемент 27, який є зануреним ють, з'єднують електричним ланцюгом 20 з входом джерела живлення 21 (див фіг 4, 5) Проводять перевірку ВІДПОВІДНОСТІ температури досліджуваного матеріалу (рідкої речовини) 23 стандартній температурі 20°С (за допомогою термометра 26) та занурення робочого органа 11 у досліджуваний матеріал 23 Робочий орган 11 датчика в'язкості повинен бути цілком зануреним у згаданий досліджуваний матеріал 23 (див фіг 4) При ВІДПОВІДНОСТІ вищезазначеним вимогам (щодо ВІДПОВІДНОСТІ температури досліджуваного матеріалу (рідкої речовини) 23 величині 20°С та занурення робочого органа 11 у досліджуваний матеріал (рідку речовину) 23, вмикають джерело живлення 21 і подають живлення на підсилювач збудження низької частоти 17 і прилади 18 і 19, що реєструють, (ВІДПОВІДНО, на електронно-лічильний частотомір і реєстратор ЛІНІЙНИХ переміщень зонда) (див фіг 4) При взаємодії магнггного поля постійного магнггу 12 (N/S) з індукційними датчиками 14 в одному з них (наприклад, лівому - ВІДПОВІДНО ДО фіг 1) буде вироблятися сигнал у вигляді електрорушійної сили (є р с ) індукції 3 цього індукційного датчика 14 сигнал у вигляді є р с індукції буде подаватися на підсилювач збудження низької частоти 17 і з останнього (вже підсилений) - на електровібратор 5 (наприклад, на лівий електровібратор 5 - ВІДПОВІДНО до фіг 1) та на вхід приладів 18 і 19, що реєструють (див фіг 4,5) При цьому електровібратор 5 буде утворювати електромагнггне поле Під дією електромагнггного поля, яке утворено електровібратором 5, рухомий магнітний якір 6, що конструктивно виконаний двополюсним, буде виштовхуватися зі згаданого електровібратора 5 у напрямку іншого електровібратора 5 (правого - ВІДПОВІДНО ДО 45078 схеми на фіг 1), який не працює у перший напівперюд коливань Рухомий магнітний якір 6, що спирається на підшипники ковзання 4 втулками 7, буде ковзати по них практично без тертя (у зв'язку з тим, що для ПІДШИПНИКІВ ковзання 4 вибирається матеріал з мінімальним коефіцієнтом тертя, наприклад, фторопласт, а визначені підшипники ковзання 4 додатково контактують з полірованою поверхнею втулок 7) При переміщенні магнгтного якоря 6 вздовж корпуса 1 по прорізах 13 у зазначеному корпусі 1 будуть переміщуватись і кронштейни 9 та 10 (із закріпленими на них, ВІДПОВІДНО, ро бочим органом 11 датчика в'язкості і постійним магнггом 12 (N/S)) При цьому постійний магніт 12 буде взаємодіяти з індукційним датчиком 14 Переміщення рухомого магнгтного якоря 6 буде викликати стиск пружини 8 (правої - ВІДПОВІДНО ДО схеми на фіг 1) Зазначена пружина 8 при своєму стиску буде накопичувати енергію Наприкінці переміщення рухомого магнітного якоря 6 (див фіг 2), коли буде досягнуте рівноважне положення (коли сила впливу електромагнітного поля з електровібратора 5 на магнітний якір 6 буде дорівнювати силі затягування пружини 8), згаданий магнітний якір 6 зупиниться У цей момент індукційний датчик 14 (лівий -ВІДПОВІДНО до схеми на фіг 1) припинить виробляти сигнал у вигляді є р с індукції (сигнал стане дорівнювати «нулю»), а задіяний електровібратор 5 обезструмиться Рухомий магнітний якір 6 під дією пружини 8 (правої -ВІДПОВІДНО ДО схеми на фіг 1), яка є упертою одним кінцем у рухому кришку 2, а другим - у торець магнітного якоря 6, почне переміщуватися у зворотний бік При цьому постійний магніт 12 почне взаємодіяти з іншим індукційним датчиком 14 (правим - ВІДПОВІДНО ДО схеми на фіг 1) Визначений датчик 14 почне виробляти сигнал у вигляді є р с індукції і за вищевказаною схемою подавати його на підсилювач збудження 17, а потім, вже підсилений, на інший електровібратор 5 (правий електровібратор 5 - ВІДПОВІДНО ДО схеми на фіг 1), який буде працювати у другий півперюд коливань, та на вхід приладів 18 і 19, що реєструють (ВІДПОВІДНО, на електронно-лічильний частотомір і реєстратор ЛІНІЙНИХ переміщень зонда) Під ДІЄЮ електромагнггного поля зазначеного електровібратора 5 (правого - ВІДПОВІДНО ДО схеми на фіг 1) рухомий магнггний якір 6 почне переміщатися убік іншого електровібратора 5 (лівого електровібратора 5 - ВІДПОВІДНО до схеми на фіг 1), стискаючи пружину 8 (ліву - ВІДПОВІДНО ДО схеми на фіг 1) Наприкінці переміщення рухомого магнітного якоря 6 (див фіг 2), коли буде досягнуте рівноважне положення (коли сила впливу електромагнітного поля від електровібратора 5 на магнггний якір 6 буде дорівнювати силі затягування пружини 8), згаданий магнггний якір 6 знову зупиниться У цей момент індукційний датчик 14 (правий - ВІДПОВІДНО до схеми на фіг 1) припинить виробляти сигнал у вигляді є р с індукції (сигнал стане дорівнювати «нулю»), а задіяний електровібратор 5 обезструмиться Рухомий магнггний якір 6 під дією пружини 8 (лівої - ВІДПОВІДНО до схеми на фіг 1), яка є упертою одним кінцем у рухому кришку 2, а другим - у торець магнгтного якоря 6, почне переміщатися у зворотний бік Таким чином, виникають незатухаючі у часі 8 механічні коливання динамічної системи «магнггний якір 6 - пружини 8» і пов'язаного з нею датчика в'язкості З робочим органом 11, що занурений у досліджуваний матеріал 23 У залежності від в'язкості V досліджуваного матеріалу (рідкої речовини) 23 частота f власних коливань і амплггуда А власних коливань будуть різноманггними за усі ІНШІ рівні умови (сили попереднього затягування пружин 8, визначеному вигляду робочого органа 11, відстані між індукційними датчиками 14 і постійним магнітом 12, параметрами електровібратора 5, а саме, його котушки, температури t досліджуваного матеріалу 23) При дотриманні усіх вищевказаних умов частота f власних коливань і амплггуда А власних коливань динамічної системи «магнггний якір 6 - пружини 8» і пов'язаного з нею датчика в'язкості з робочим органом 11 буде відповідати визначеній величині в'язкості V досліджуваного матеріалу (речовини) 23 За допомогою приладів 18 і 19, що реєструють (наприклад, ВІДПОВІДНО, електронно-лічильного частотоміра і реєстратора ЛІНІЙНИХ переміщень зонда), визначають фактичну частота ft власних коливань і амплггуду АІ власних коливань датчика з робочим органом 11, що буде відповідати фактичному значенню в'язкості V I досліджуваного матеріалу (рідкої речовини) 23 Для цього на графіках залежності f = f (v, t) і А = f (v, t), ВІДПОВІДНО, на ocяxf і А, вибирають фактичне значення частоти fi власних коливань і амплггуди Аі власних коливань, проводять перпендикуляр до перетину з графіком і з точки перетину з графіком опускають перпендикуляр на вісь V Отримане значення в'язкості Vi буде відповідати фактичній в'язкості Vi досліджуваного матеріалу (рідкої речовини) 23 (див , ВІДПОВІДНО, фіг 6 і фіг 7) Для спрощення операції визначення фактичної величини в'язкості V, прилади 18 і 19, що реєструють, ВІДПОВІДНО, частоту f власних коливань і амплггуду А коливань, можуть бути відградуйованим за показниками в'язкості V Підвищення ефективності застосування способу визначення в'язкості, що заявляється, у порівнянні з прототипом досягається за рахунок підвищення точності визначення частоти і амплггуди коливань чутливого елемента, зануреного у досліджуване середовище, а саме, за рахунок використання авторезонансних режимів коливань динамічної системи, які найбільш точно відображають зміни впливу величини в'язкості на згадану динамічну систему У способі визначення в'язкості, що заявляється, використовується коливальна система самоналагоджувального типу, динамічні характеристики якої залежать тільки від жорсткості вмонтованих пружних елементів (пружин) і від реологічних характеристик досліджуваного середовища, зокрема, від в'язкості Підвищення ефективності застосування способу визначення в'язкості досягається також тим, що при проведенні контрольних замірювань в'язкості досліджувану речовину приводять до стандартної температури, при якій визначають фактичну в'язкість досліджуваного середовища ДЖЕРЕЛА ІНФОРМАЦІЇ 1 А с СРСР № 775667 від ЗО 10 80 , (бюл № 40), 45078 MnKGOINH/16-аналог 2 А с СРСР № 685957 від 18 0 9 7 9 , МПК G01N11/16- прототип 3 А с СРСР № 212615, MnKG01N11/16, 1967 4 А с СРСР № 238875, MnKG01N11/16, 1966 10 5 Н И Орел, Э В Губачек, Б Й Березин, В М Водолазская «Справочник технолога-полиграфиста», часть 5, Печатные краски - М «Книга», 1988г - С 188 - 202, § 4 3 «Реологические свойства красок для издательских целей» (6 \ / ФІГ. 1 Фіг. 2 5 о -І 7 11 45078 Фіг. З Фіг. 4 12 13 14 45078 Магнітний якір поспішний магніт \ 2 А в'язкості 17 / підсилювач $5уджеУНЯ низької частоти сндыкашииа датчик Z1 /в прилад, який реєструє 19 Фіг. 5 І N І І в'язмсть ФІГ. 6 \г\ 45078 15 16 \t-20'C 1 I ~ — — 1 \ V В'язкість Фіг. 7 ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Киів-119, вул сім'ї Хохлових, 15 (044) 456-20-90
ДивитисяДодаткова інформація
Автори англійськоюNykyforuk Bohdan Vasyliovych, Yershova Emma Oleksandrivna
Автори російськоюНикифорук Богдан Васильевич, Ершова Эмма Александровна
МПК / Мітки
МПК: G01N 11/16, G01N 11/10
Мітки: визначення, спосіб, в'язкості
Код посилання
<a href="https://ua.patents.su/8-45078-sposib-viznachennya-vyazkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення в’язкості</a>
Спосіб визначення в’язкості
Номер патенту: 44152
Опубліковано: 15.01.2002
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: спосіб, визначення, в'язкості
Формула / Реферат:
Спосіб визначення в'язкості дисперсного середовища, що містить занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, і збудження коливань зонда з наступним виміром амплітуди його коливань, якими відрізняється тим, що збуджують коливання зонда з власною/авторезонансною частотою, заміряють частоту і амплітуду власних/авторезонансних коливань зонда без занурення його у досліджуване середовище, заміряють при цьому...
Спосіб визначення в’язкості речовин
Номер патенту: 40910
Опубліковано: 15.08.2001
Автори: Никифорук Богдан Васильович, Єршова Емма Олександрівна
МПК: G01N 11/16
Мітки: в'язкості, визначення, спосіб, речовин
Формула / Реферат:
Спосіб визначення в'язкості речовин, при якому проводять занурення чутливого елемента, виконаного у вигляді зонда, у досліджуване середовище, подають електричний струм до системи збудження коливань чутливого елемента, збуджують коливання зонда, і за зміною параметрів коливальної системи, яка зв'язана з величиною в'язкості речовини, визначають її значення, який відрізняється тим, що збуджують коливання зонда з власною частотою, а величину...
Спосіб визначення в’язкості дисперсного середовища
Номер патенту: 38126
Опубліковано: 15.05.2001
Автори: Никифорук Богдан Васильович, Комаров Володимир Олексадрович, Єршова Емма Олександрівна
МПК: G01N 11/00, G01N 11/10
Мітки: спосіб, в'язкості, дисперсного, середовища, визначення
Текст:
...(див. фіг. 4-5). 2 38126 Проводять перевірку занурення робочого органа 11 у досліджуваний матеріал (речовину) 22. Робочий орган 11 датчика в'язкості повинен бути цілком зануреним у згаданий досліджуваний матеріал (речовину) 22. Вмикають блок (джерело) живлення 19 і подають живлення на підсилювач збудження 17 і прилад 18, який реєструє. При взаємодії магнітного поля постійного магніту 12 з індукційними датчиками 14 в одному з них (наприклад,...
Спосіб визначення в’язкості рідких речовин
Номер патенту: 38411
Опубліковано: 15.05.2001
Автори: Єршова Емма Олександрівна, Никифорук Богдан Васильович
МПК: G01N 11/16, G01N 11/10
Мітки: спосіб, рідких, речовин, в'язкості, визначення
Текст:
...досліджуваного матеріалу (рідкої речовини) 22 використовують метод пропускання холодної речовини, наприклад, газу, азоту або води (позиція 31), крізь порожнину 29 між корпусом 27 ємності 21 та додатковою стінкою 28. Водночас з приведенням досліджуваного матеріалу (рідкої речовини) 22 до відповідності стандартній температурі 20°С, вібраційний віскозиметр установлюють на кришці 23, що закриває ємність 21 з досліджуваним матеріалом (рідкою...
Спосіб руйнування масиву складеного крутоспадними пластами гірських порід з різними по міцності і вязкості характеристиками

Номер патенту: 9020
Опубліковано: 30.09.1996
Автори: Димченко Олег Васильович, Ратушний В'ячеслав Михайлович, Бондаренко Микола Анатольович
МПК: E21C 37/00
Мітки: крутоспадними, порід, в'язкості, спосіб, різними, масиву, характеристиками, гірських, складеного, руйнування, міцності, пластами
Попередній патент: Спосіб вимірювання швидкості, дзета-потенціалу і розмірів частинки
Наступний патент: Пристрій для дугового зварювання
Випадковий патент: Пристрій для розподілу й відбору