Універсальна космічна платформа
Номер патенту: 58610
Опубліковано: 26.04.2011
Автори: Зубенко Володимир Пилипович, Кавун Василь Вікторович, Вайсеро Михайло Васильович, Макаров Олександр Леонідович, Шовкопляс Юрій Анатолійович, Москальов Сергій Ігорович

Формула / Реферат
Універсальна космічна платформа, стабілізована в орбітальній системі координат на сонячно-синхронних, геостаціонарних орбітах і орбітах загального положення, що містить негерметичний корпус, утворений у вигляді чотиригранної призми торцевою панеллю корисного навантаження, торцевою панеллю стикувальною і бічними панелями, зовні й усередині якого встановлені модуль корисного навантаження, прилади системи орієнтації, рушійна установка, блок панелей орієнтованої сонячної батареї з поворотними механізмами, траверсою і приводом орієнтації, пристрої кріплення платформи до ракети-носія і інші прилади забезпечувальних систем, яка відрізняється тим, що негерметичний корпус платформи виконаний у вигляді плоскої чотиригранної призми, торцева панель корисного навантаження і торцева панель стикувальна якого скріплені за допомогою бічних панелей, при цьому на зовнішній і внутрішній поверхнях панелі корисного навантаження відповідно розміщені і високоточно з'юстовані модуль корисного навантаження і прилади системи орієнтації, зовні бічних панелей розміщена рушійна установка, зовні у кутових зонах торцевої панелі стикувальної розміщені пристрої кріплення платформи до ракети-носія , а в центрі торцевої панелі стикувальної встановлений привід орієнтації, до якого послідовно за допомогою поворотних механізмів прикріплені траверса і панелі блока орієнтованої сонячної батареї, причому поворотні механізми оснащені регульованим фіксатором.
Текст
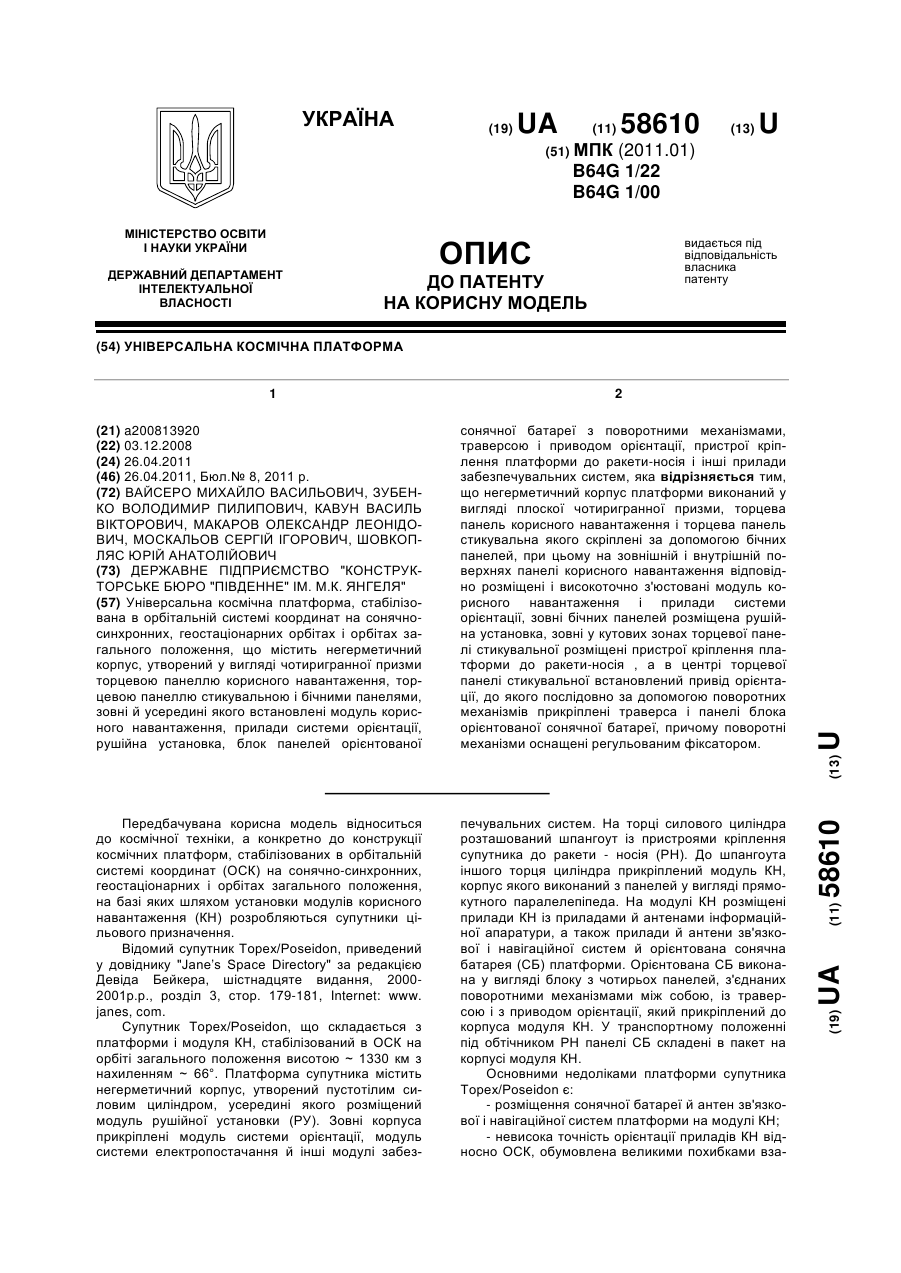
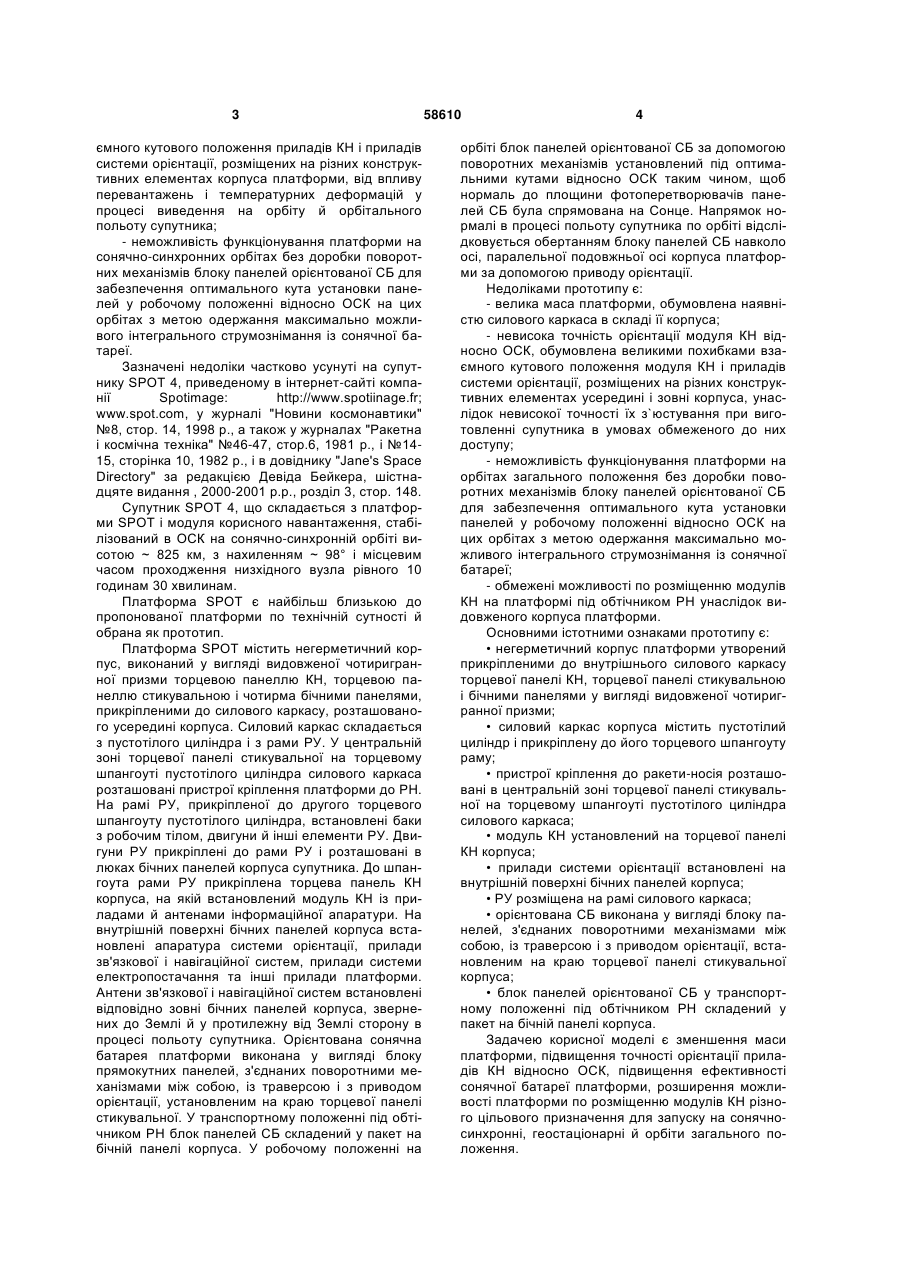
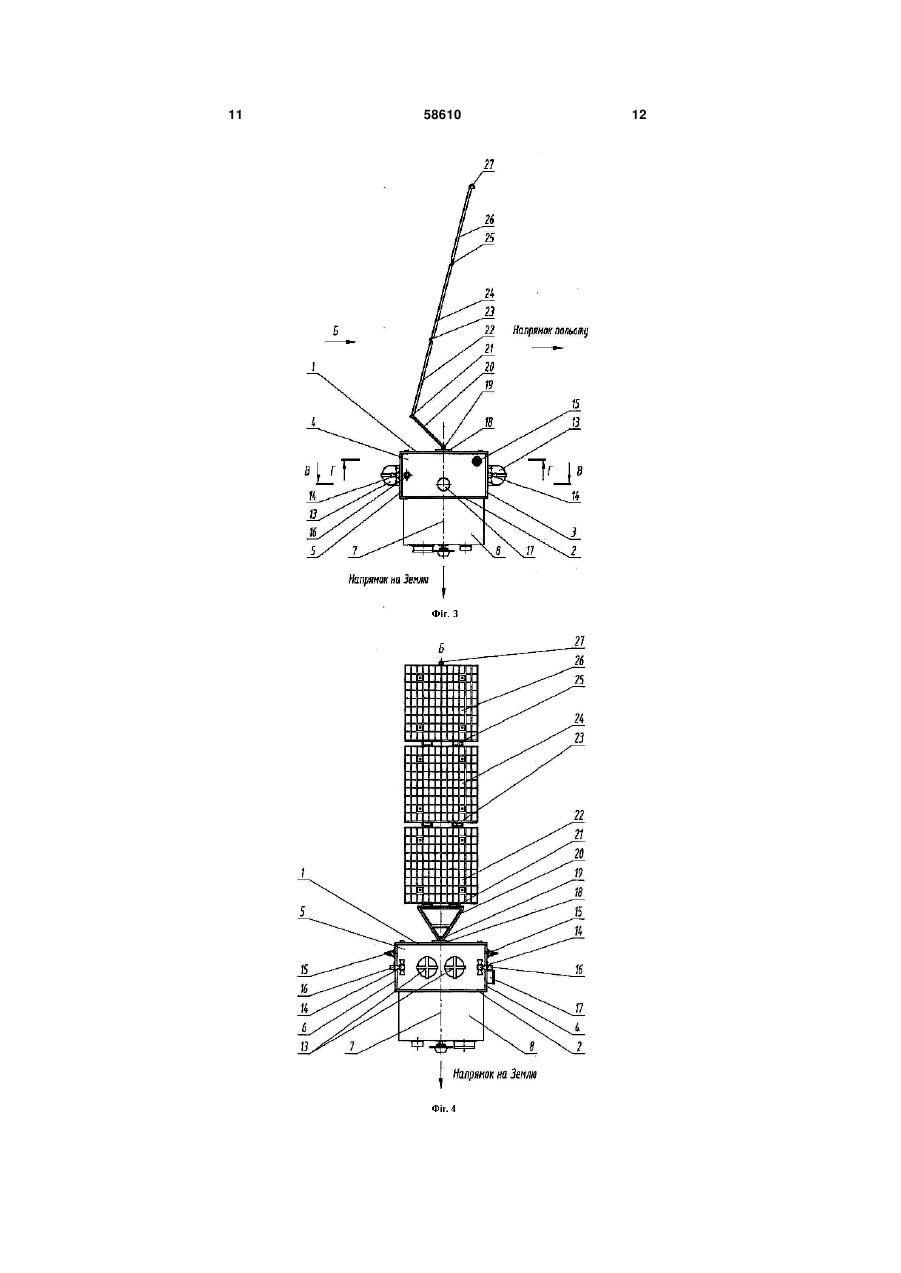
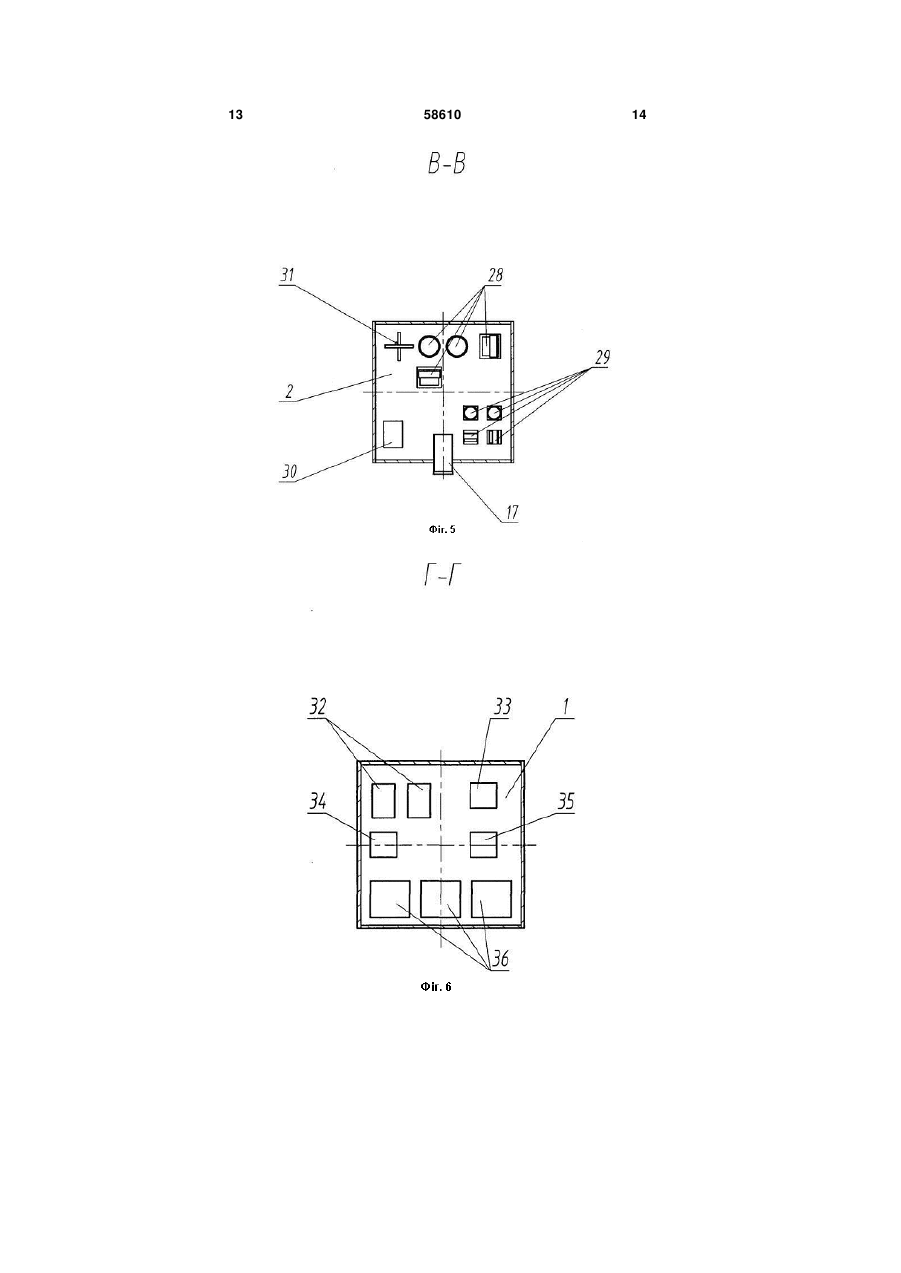
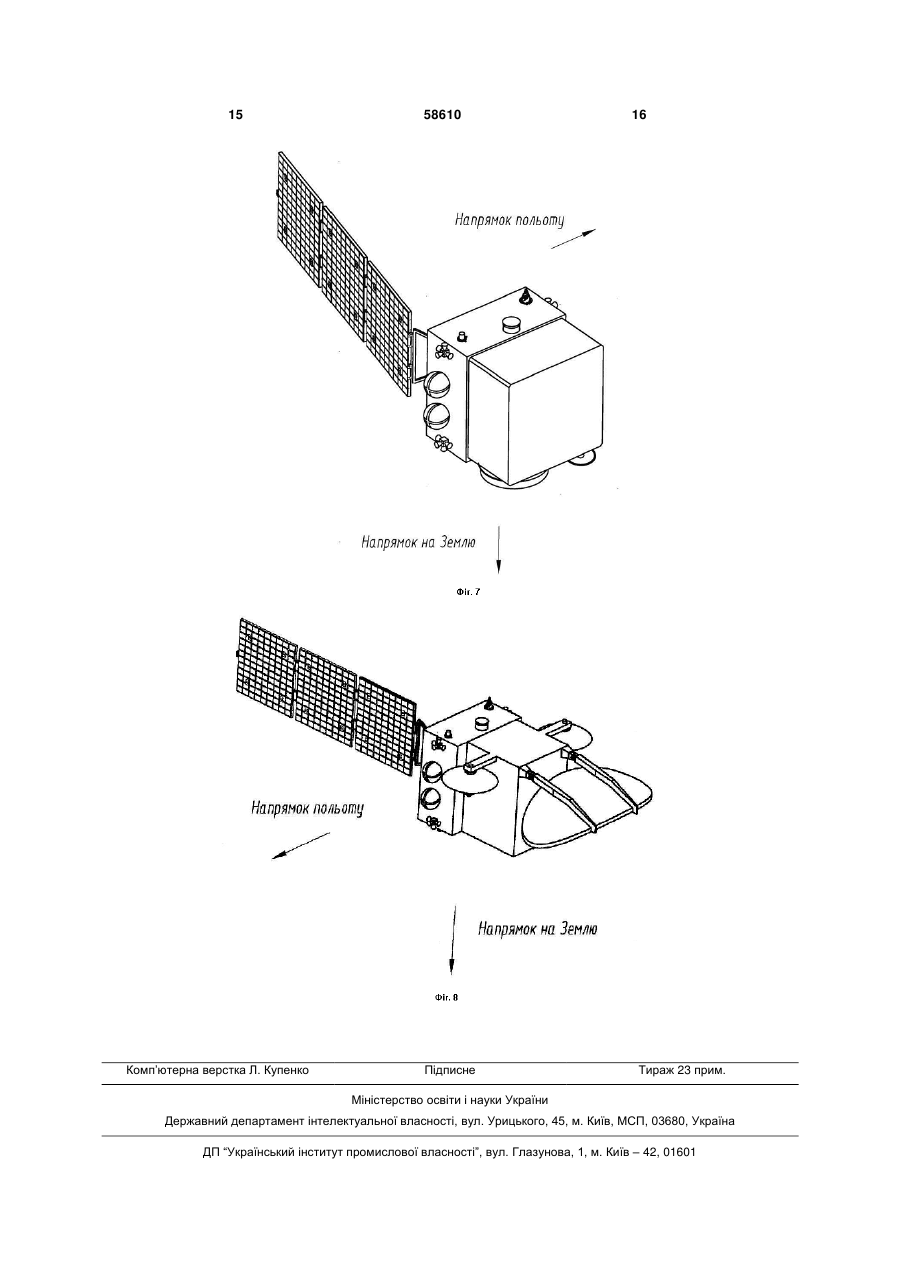
Універсальна космічна платформа, стабілізована в орбітальній системі координат на сонячносинхронних, геостаціонарних орбітах і орбітах загального положення, що містить негерметичний корпус, утворений у вигляді чотиригранної призми торцевою панеллю корисного навантаження, торцевою панеллю стикувальною і бічними панелями, зовні й усередині якого встановлені модуль корисного навантаження, прилади системи орієнтації, рушійна установка, блок панелей орієнтованої U 1 3 ємного кутового положення приладів КН і приладів системи орієнтації, розміщених на різних конструктивних елементах корпуса платформи, від впливу перевантажень і температурних деформацій у процесі виведення на орбіту й орбітального польоту супутника; - неможливість функціонування платформи на сонячно-синхронних орбітах без доробки поворотних механізмів блоку панелей орієнтованої СБ для забезпечення оптимального кута установки панелей у робочому положенні відносно ОСК на цих орбітах з метою одержання максимально можливого інтегрального струмознімання із сонячної батареї. Зазначені недоліки частково усунуті на супутнику SPOT 4, приведеному в інтернет-сайті компанії Spotimage: http://www.spotiinage.fr; www.spot.com, у журналі "Новини космонавтики" №8, стор. 14, 1998 p., a також у журналах "Ракетна і космічна техніка" №46-47, стор.6, 1981 p., і №1415, сторінка 10, 1982 р., і в довіднику "Jane's Space Directory" за редакцією Девіда Бейкера, шістнадцяте видання , 2000-2001 р.р., розділ 3, стор. 148. Супутник SPOT 4, що складається з платформи SPOT і модуля корисного навантаження, стабілізований в ОСК на сонячно-синхронній орбіті висотою ~ 825 км, з нахиленням ~ 98° і місцевим часом проходження низхідного вузла рівного 10 годинам 30 хвилинам. Платформа SPOT є найбільш близькою до пропонованої платформи по технічній сутності й обрана як прототип. Платформа SPOT містить негерметичний корпус, виконаний у вигляді видовженої чотиригранної призми торцевою панеллю КН, торцевою панеллю стикувальною і чотирма бічними панелями, прикріпленими до силового каркасу, розташованого усередині корпуса. Силовий каркас складається з пустотілого циліндра і з рами РУ. У центральній зоні торцевої панелі стикувальної на торцевому шпангоуті пустотілого циліндра силового каркаса розташовані пристрої кріплення платформи до РН. На рамі РУ, прикріпленої до другого торцевого шпангоуту пустотілого циліндра, встановлені баки з робочим тілом, двигуни й інші елементи РУ. Двигуни РУ прикріплені до рами РУ і розташовані в люках бічних панелей корпуса супутника. До шпангоута рами РУ прикріплена торцева панель КН корпуса, на якій встановлений модуль КН із приладами й антенами інформаційної апаратури. На внутрішній поверхні бічних панелей корпуса встановлені апаратура системи орієнтації, прилади зв'язкової і навігаційної систем, прилади системи електропостачання та інші прилади платформи. Антени зв'язкової і навігаційної систем встановлені відповідно зовні бічних панелей корпуса, звернених до Землі й у протилежну від Землі сторону в процесі польоту супутника. Орієнтована сонячна батарея платформи виконана у вигляді блоку прямокутних панелей, з'єднаних поворотними механізмами між собою, із траверсою і з приводом орієнтації, установленим на краю торцевої панелі стикувальної. У транспортному положенні під обтічником РН блок панелей СБ складений у пакет на бічній панелі корпуса. У робочому положенні на 58610 4 орбіті блок панелей орієнтованої СБ за допомогою поворотних механізмів установлений під оптимальними кутами відносно ОСК таким чином, щоб нормаль до площини фотоперетворювачів панелей СБ була спрямована на Сонце. Напрямок нормалі в процесі польоту супутника по орбіті відслідковується обертанням блоку панелей СБ навколо осі, паралельної подовжньої осі корпуса платформи за допомогою приводу орієнтації. Недоліками прототипу є: - велика маса платформи, обумовлена наявністю силового каркаса в складі її корпуса; - невисока точність орієнтації модуля КН відносно ОСК, обумовлена великими похибками взаємного кутового положення модуля КН і приладів системи орієнтації, розміщених на різних конструктивних елементах усередині і зовні корпуса, унаслідок невисокої точності їх з`юстування при виготовленні супутника в умовах обмеженого до них доступу; - неможливість функціонування платформи на орбітах загального положення без доробки поворотних механізмів блоку панелей орієнтованої СБ для забезпечення оптимального кута установки панелей у робочому положенні відносно ОСК на цих орбітах з метою одержання максимально можливого інтегрального струмознімання із сонячної батареї; - обмежені можливості по розміщенню модулів КН на платформі під обтічником РН унаслідок видовженого корпуса платформи. Основними істотними ознаками прототипу є: • негерметичний корпус платформи утворений прикріпленими до внутрішнього силового каркасу торцевої панелі КН, торцевої панелі стикувальною і бічними панелями у вигляді видовженої чотиригранної призми; • силовий каркас корпуса містить пустотілий циліндр і прикріплену до його торцевого шпангоуту раму; • пристрої кріплення до ракети-носія розташовані в центральній зоні торцевої панелі стикувальної на торцевому шпангоуті пустотілого циліндра силового каркаса; • модуль КН установлений на торцевої панелі КН корпуса; • прилади системи орієнтації встановлені на внутрішній поверхні бічних панелей корпуса; • РУ розміщена на рамі силового каркаса; • орієнтована СБ виконана у вигляді блоку панелей, з'єднаних поворотними механізмами між собою, із траверсою і з приводом орієнтації, встановленим на краю торцевої панелі стикувальної корпуса; • блок панелей орієнтованої СБ у транспортному положенні під обтічником РН складений у пакет на бічній панелі корпуса. Задачею корисної моделі є зменшення маси платформи, підвищення точності орієнтації приладів КН відносно ОСК, підвищення ефективності сонячної батареї платформи, розширення можливості платформи по розміщенню модулів КН різного цільового призначення для запуску на сонячносинхронні, геостаціонарні й орбіти загального положення. 5 Для рішення цієї задачі пропонована платформа має наступні нові істотні відмітні ознаки: • негерметичний корпус платформи виконаний у вигляді плоскої чотиригранної призми, торцева панель КН і торцева панель стикувальна якого скріплені за допомогою бічних панелей; • модуль КН і прилади системи орієнтації розміщені відповідно на зовнішній і внутрішній поверхнях торцевої панелі КН і високоточно з`юстовані; • РУ розміщена зовні на бічних панелях корпуса; • пристрої кріплення платформи до РН розміщені в кутових зонах зовнішньої поверхні торцевої панелі стикувальної, розташованої при виведенні платформи на орбіту перпендикулярно подовжньої осі РН; • орієнтована СБ виконана у вигляді блоку послідовно з'єднаних поворотними механізмами панелей, траверси і приводу орієнтації, встановленого в центрі торцевої панелі стикувальної; • поворотні механізми блоку панелей орієнтованої СБ постачені регульованим фіксатором оптимального кута установки панелей СБ у робочому положенні; • блок панелей орієнтованої СБ у транспортному положенні під обтічником РН складений у пакет у центрі торцевої панелі стикувальної. Рішення поставленої задачі забезпечується сукупністю приведених вище нових істотних відмітних ознак і наступних відомих істотних ознак платформи: • платформа містить негерметичний корпус, утворений торцевими і бічними панелями у вигляді чотиригранної призми; • зовні й усередині корпуса платформи встановлені модуль корисного навантаження, прилади системи орієнтації, рушійна установка, блок панелей орієнтованої СБ із поворотними механізмами, траверсою і приводом орієнтації, пристрої кріплення платформи до РН та інші прилади забезпечувальних систем. Сутність пропонованого технічного рішення пояснюється кресленнями. На фіг. 1 і 2 зображений загальний вигляд і вигляд А платформи в транспортному положенні під обтічником РН. Негерметичний корпус платформи містить торцеву панель стикувальну 1, торцеву панель КН 2 і бічні панелі 3, 4, 5, 6. Подовжня вісь 7 корпуса платформи розташована перпендикулярно торцевої панелі стикувальної 1 і торцевої панелі КН 2. На зовнішній поверхні торцевої панелі КН 2 установлений модуль КН 8 із приладами й антеною інформаційної апаратури, максимально можливі габаритні розміри якого визначаються вільним об’ємом під обтічником 9 РН. У кутових зонах зовнішньої поверхні торцевої панелі стикувальної 1 розташовані пристрої 10 кріплення платформи до пірозамков РН, а в центральній зоні торцевої панелі стикувальної 1 установлений складений у пакет 11 блок орієнтованої СБ, зачекований пірочеками 12. При виведенні супутника на орбіту подовжня вісь 7 корпуса платформи розташована паралельно подовжньою осі обтічника 9 РН. 58610 6 На фіг. 3 і 4 зображений загальний вигляд і вигляд Б платформи в робочому положенні на орбіті загального положення з нахиленням 50-85°. Подовжня вісь 7 корпуса платформи розташована вертикально. На торцевій панелі КН 2 установлений модуль КН 8, звернений до Землі в процесі польоту супутника. На бічних панелях 3 і 5, розташованих відповідно по напрямку польоту й у протилежному напрямку, установлені баки 13 з робочим тілом, двигуни 14 і інші елементи РУ. На бічних панелях 4 і 6 розташовані антени зв'язкової 15 і навігаційної 16 систем, а також бленда зоряного давача 17 системи орієнтації. У центрі торцевої панелі стикувальної 1, зверненої у протилежну від Землі сторону в процесі польоту супутника, установлений привод орієнтації СБ 18, до якого за допомогою поворотного механізму 19 прикріплена траверса 20, а до неї за допомогою поворотного механізму 21 послідовно прикріплені панелі СБ 22, 24, 26 з поворотними механізмами 23, 25 і давач напрямку на Сонце 27. Панелі СБ 22, 24 і 26 у робочому положенні розташовані в одній площині під оптимальним кутом ~ 30° щодо подовжньої осі 7 корпуса платформи. У процесі польоту супутника по орбіті орієнтація СБ на Сонце забезпечується обертанням блоку панелей СБ навколо подовжньої осі корпуса 7 за допомогою приводу орієнтації 18 по команді від давача напрямку на Сонце 27. Таке положення блоку панелей орієнтованої СБ забезпечує, відповідно до проведених розрахунків, максимальне струмознімання із сонячної батареї при запуску супутника на орбіту загального положення. На фіг. 5 у розрізі В-В усередині корпуса платформи зображене розміщення приладів на торцевої панелі КН 2, на якій закріплені зоряний давач 17, двигуни - маховики 28, вимірники кутової швидкості 29, магнітометр 30 і магнітні виконавчі органи 31 системи орієнтації. На фіг. 6 у розрізі Г-Г усередині корпуса зображене розміщення приладів на торцевої панелі стикувальної 1 , на якій установлені блоки хімічної батареї 32 і прилад автоматики 33 системи електропостачання, електронний блок зв'язкової системи 34, електронний блок навігаційної системи 35, а також блоки бортового комп'ютера 36. Після виведення на орбіту і відділення від РН по команді від системи керування спрацьовують пірочекі 12 і панелі блоку орієнтованої СБ 22,24, 26 за допомогою поворотних механізмів 19, 21, 23 і 25 розгортаються і фіксуються в робочому положенні. Орієнтація СБ на Сонце виконується по команді від давача напрямку на Сонце 27 обертанням вала приводу орієнтації 18 навколо подовжньої осі 7 корпуса платформи. Після підзарядки хімічної батареї системи електропостачання супутник готовий функціонувати по цільовому призначенню. Далі по команді від системи керування прилади КН починають одержувати й обробляти інформацію цільового призначення. Ця інформація разом з навігаційною і телеметричною інформацією про супутник за допомогою зв'язкової системи передається на наземні пункти прийому інформації. 7 На фіг. 7 приведений супутник у робочому положенні на сонячно-синхронній орбіті з нахиленням ~ 98° при місцевому часі проходження низхідного вузла рівного 10 годинам 30 хвилинам. Після виведення на орбіту і відділення від РН супутник орієнтується і стабілізується відносно ОСК таким чином, що подовжня вісь 7 корпуса платформи розташована перпендикулярно площині орбіти, а торцева панель стикувальна 1 корпуса звернена убік Сонця. Панелі СБ 22, 24 і 26 у робочому положенні розташовані в одній площині під оптимальним кутом ~ 40° щодо подовжньої осі 7 корпуса платформи. У процесі польоту супутника по орбіті орієнтація СБ на Сонце забезпечується обертанням блоку панелей СБ навколо подовжньої осі корпуса 7 за допомогою приводу орієнтації 18 по команді від давача напрямку на Сонце 27. Таке положення блоку панелей орієнтованої СБ забезпечує, відповідно до проведених розрахунків, максимальне струмознімання із сонячної батареї при запуску супутника на сонячно-синхронну орбіту. Подальша робота супутника аналогічна приведеної вище для супутника, виведеного на орбіту загального положення. На фіг. 8 приведений супутник стабілізований в ОСК на геостаціонарній орбіті з нахиленням ~ 0°. Після виведення на орбіту і відділення від РН супутник орієнтується і стабілізується відносно ОСК таким чином, що подовжня вісь 7 корпуса платформи розташована перпендикулярно площині орбіти. По команді від системи керування супутника спрацьовують пірочекі 12 і панелі блоку орієнтованої СБ 22, 24, 26 і траверса 20 за допомогою поворотних механізмів 19, 21, 23. і 25 розгортаються і фіксуються в робочому положенні в одній площині, що збігається з подовжньою віссю 7 корпуса 58610 8 платформи. Орієнтація СБ на Сонце забезпечується по команді від давача напрямку на Сонце 27 обертанням вала приводу орієнтації 18 навколо подовжньої осі 7 корпуса платформи. Таке положення блоку панелей орієнтованої СБ забезпечує максимальне струмознімання із сонячної батареї при запуску супутника на геостаціонарну орбіту. Подальша робота супутника аналогічна приведеної вище для супутників, виведених на орбіту загального положення і на сонячно-синхронну орбіту. Використання пропонованої космічної платформи дозволить: - зменшити масу і розширити можливості платформи по розміщенню модулів КН різного цільового призначення шляхом виконання її негерметичного корпуса у вигляді плоскої чотиригранної призми, торцева панель КН і торцева панель стикувальна якого скріплені за допомогою бічних панелей; - підвищити точність орієнтації приладів корисного навантаження відносно ОСК шляхом установки модуля КН на зовнішній поверхні торцевої панелі КН, а приладів системи орієнтації на внутрішній поверхні торцевої панелі КН; - забезпечити максимальну ефективність СБ платформи на сонячно-синхронних, геостаціонарних і орбітах загального положення шляхом використання поворотних механізмів блоку панелей СБ постачених регульованим фіксатором оптимального кута установки панелей СБ у робочому положенні. Крім того, пропоноване технічне рішення дозволить істотно знизити витрати і скоротити терміни створення супутників за рахунок організації серійного виробництва платформ. 9 58610 10 11 58610 12 13 58610 14 15 Комп’ютерна верстка Л. Купенко 58610 Підписне 16 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюUniversal space platform
Автори англійськоюVaisero Mykhailo Vasyliovych, Zubenko Volodymyr Pylypovych, Kavun Vasyl Viktorovych, Makarov Oleksandr Leonidovych, Moskaliov Serhii Ihorovych, Shovkoplias Yurii Anatoliiovych
Назва патенту російськоюУниверсальная космическая платформа
Автори російськоюВайсеро Михаил Васильевич, Зубенко Владимир Филиппович, Кавун Василий Викторович, Макаров Александр Леонидович, Москалев Сергей Игоревич, Шовкопляс Юрий Анатольевич
МПК / Мітки
Мітки: платформа, універсальна, космічна
Код посилання
<a href="https://ua.patents.su/8-58610-universalna-kosmichna-platforma.html" target="_blank" rel="follow" title="База патентів України">Універсальна космічна платформа</a>
Космічна платформа
Номер патенту: 56120
Опубліковано: 10.01.2011
Автори: Кавун Василь Вікторович, Москальов Сергій Ігорович, Добрушина Марина Гарріївна, Щудро Анатолій Петрович, Зубенко Володимир Пилипович, Вайсеро Михайло Васильович, Дьяченко Едуард Миколайович
Формула / Реферат:
Космічна платформа, стабілізована в орбітальній системі координат на сонячно-синхронних орбітах і на орбітах загального положення, що містить негерметичний корпус, утворений у вигляді чотиригранної призми, прикріпленої до силового каркаса торцевою панеллю корисного навантаження, бічними панелями і торцевою стикувальною панеллю, зовні й усередині якого встановлені прилади корисного навантаження, прилади системи орієнтації, коригувальна...
Уніфікована космічна платформа
Номер патенту: 91982
Опубліковано: 27.09.2010
Автори: Москальов Сергій Ігорович, Тарасов Геннадій Васильович, Зубенко Володимир Пилипович, Дьяченко Едуард Миколайович, Добрушина Марина Гарріївна, Щудро Анатолій Петрович, Вайсеро Михайло Васильович, Кавун Василь Вікторович
Мітки: космічна, платформа, уніфікована
Формула / Реферат:
Уніфікована космічна платформа, стабілізована в орбітальній системі координат, що містить негерметичний корпус, утворений скріпленими між собою панелями, зовні й усередині якого встановлені прилади корисного навантаження, прилади активної системи орієнтації, коригуюча рухова установка, неорієнтована сонячна батарея з поворотними механізмами й інші прилади забезпечувальної апаратури, яка відрізняється тим, що в ній негерметичний корпус,...
Космічна платформа
Номер патенту: 88881
Опубліковано: 10.12.2009
Автори: Кавун Василь Вікторович, Дьяченко Едуард Миколайович, Вайсеро Михайло Васильович, Тарасов Геннадій Васильович
Формула / Реферат:
1. Космічна платформа, що включає несучу конструкцію, виконану у вигляді комбінованої оболонки обертання, із конічною та циліндричною частинами, нижнім опорним шпангоутом, верхнім силовим шпангоутом та внутрішнім кріпильним шпангоутом, апаратуру бортового забезпечувального комплексу, рушійну установку, сонячні батареї, яка відрізняється тим, що вона оснащена додатковою несучою конструкцією і багатофункціональними апаратурними панелями, при...
Універсальна платформа з незнімними пристроями
Номер патенту: 32091
Опубліковано: 12.05.2008
Автори: Зайченко Володимир Вікторович, Кочмала Григорій Данилович, Мумренко Анатолій Петрович, Мицик Микола Андрійович
МПК: B61D 15/00
Мітки: універсальна, незнімними, пристроями, платформа
Формула / Реферат:
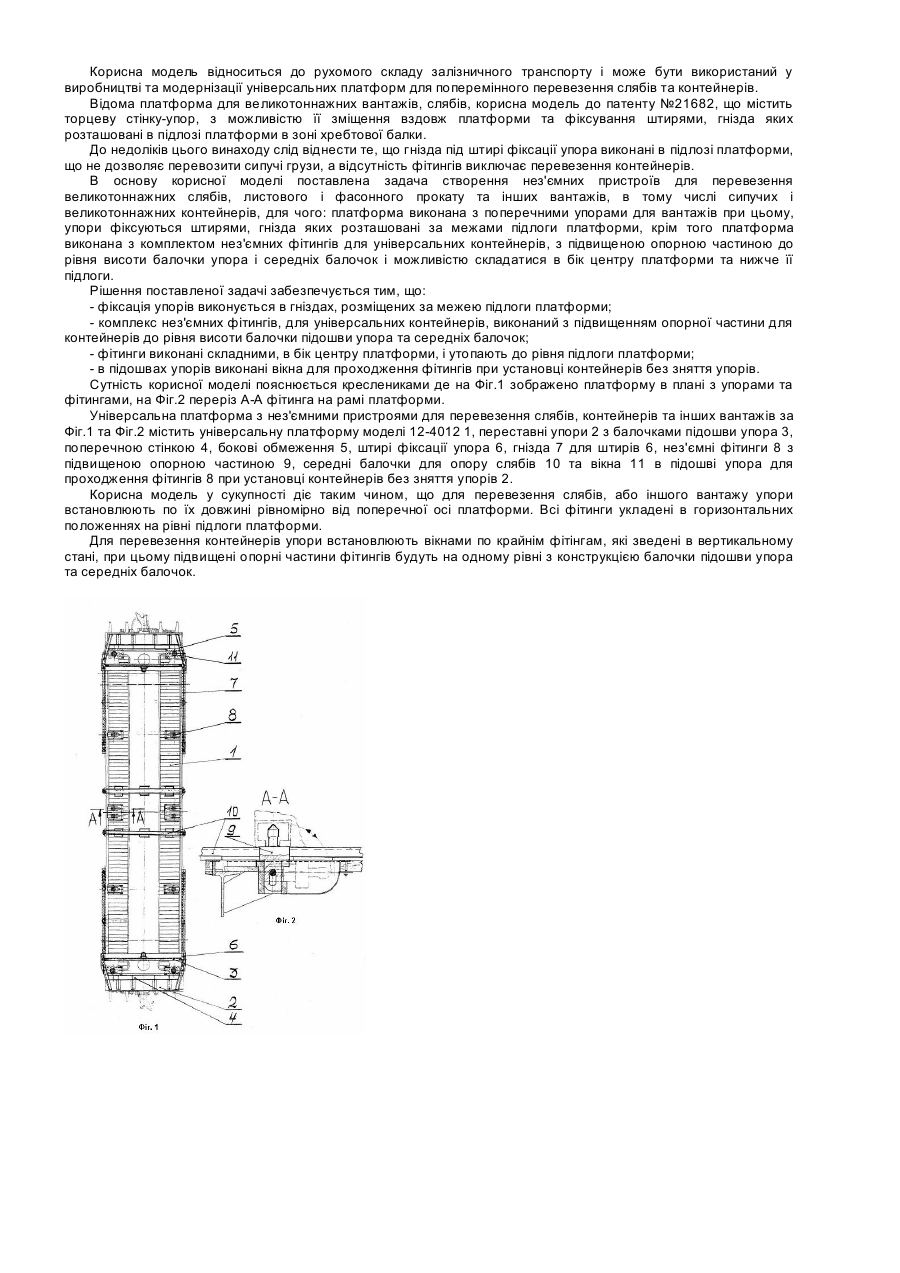
Універсальна платформа з незнімними пристроями для закріплення слябів, що містить торцеву стінку з можливістю її зміщення вздовж платформи та фіксування штирями, гнізда яких розташовані в підлозі платформи в зоні хребтової балки, з кожного боку платформи розташована щонайменше одна бокова стінка, яка відрізняється тим, що платформа виконана з поперечними переставними упорами для вантажів, при цьому упори фіксуються штирями, гнізда яких...
Багатоярусна універсальна обертальна платформа
Номер патенту: 36047
Опубліковано: 10.10.2008
Автор: Калітінов Віктор Вікторович
Мітки: багатоярусна, платформа, обертальна, універсальна
Формула / Реферат:
Багатоярусна універсальна обертальна платформа, яка відрізняється тим, що включає опорну вісь, на якій ярусами кріпляться не менше ніж дві, вільно і незалежно рухомі навколо осі, обертальні платформи.
Попередній патент: Спосіб приготування горілки
Наступний патент: Реактор
Випадковий патент: Спосіб контролю поширення та шкідливості збудника борошнистої роси (sphaerotheca mors-uvae bert.et curt.) чорної смородини