Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання /варіанти/
Номер патенту: 64922
Опубліковано: 15.03.2004
Автори: Філімоніхін Геннадій Борисович, Черниш Сергій Григорович


Формула / Реферат
1. Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання, що містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, розміщені на біговій доріжці, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на біговій доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігової доріжки співпали, і порожнина незаповнена або заповнена частково чи повністю рідкою речовиною такої питомої ваги, що кулі в ній тонуть, який відрізняється тим, що висота бігової доріжки в ![]() і більше разів більша за діаметр кулі.
і більше разів більша за діаметр кулі.
2. Пристрій за п. 1, який відрізняється тим, що бігова доріжка утворюється обертанням навколо осі обертання частини кривої
де:
![]() - відстань від осі обертання до точки на біговій доріжці;
- відстань від осі обертання до точки на біговій доріжці;
![]() - висота, на якій знаходиться ця точка;
- висота, на якій знаходиться ця точка;
![]() - номінальна швидкість обертання тіла;
- номінальна швидкість обертання тіла;
![]() - прискорення вільного падіння;
- прискорення вільного падіння;
![]() - радіус кулі.
- радіус кулі.
3. Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання, що містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, поміщені на бігову доріжку, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на біговій доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, порожнину корпусу заповнює рідка речовина і корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігової доріжки співпали, який відрізняється тим, що питома вага рідкої речовини така, що кулі в ній плавають, бігова доріжка розташована так, що кулі її охоплюють зовні і висота бігової доріжки в (1+![]() ) і більша разів більша за діаметр кулі.
) і більша разів більша за діаметр кулі.
4. Пристрій за п. 3, який відрізняється тим, що бігова доріжка утворюється обертанням навколо осі обертання кривої
де:
![]() - відстань від осі обертання до точки на біговій доріжці;
- відстань від осі обертання до точки на біговій доріжці;
![]() - висота, на якій знаходиться ця точка;
- висота, на якій знаходиться ця точка;
![]() - номінальна швидкість обертання тіла;
- номінальна швидкість обертання тіла;
![]() - прискорення вільного падіння;
- прискорення вільного падіння;
![]() - радіус кулі.
- радіус кулі.
5. Пристрій за п. 1 або п. 2, або ... п. 4, який відрізняється тим, що корпус виконаний у вигляді бандажа, що надягається на тіло або у вигляді насадки на вал, або у вигляді вставки у порожнисте тіло.
6. Пристрій за п. 1 або п. 2, або ... п. 5, який відрізняється тим, що усередині корпусу виконуються дві і більше бігові доріжки з спільною віссю утворення, що охоплюють одна одну.
7. Пристрій за п. 6, який відрізняється тим, що на різних бігових доріжках кулі різного діаметра.
8. Пристрій за п. 1 або п. 2, або ... п. 6, який відрізняється тим, що висота бігової доріжки у ![]() n=3, 4, 5... разів більше за діаметр кулі.
n=3, 4, 5... разів більше за діаметр кулі.
Текст
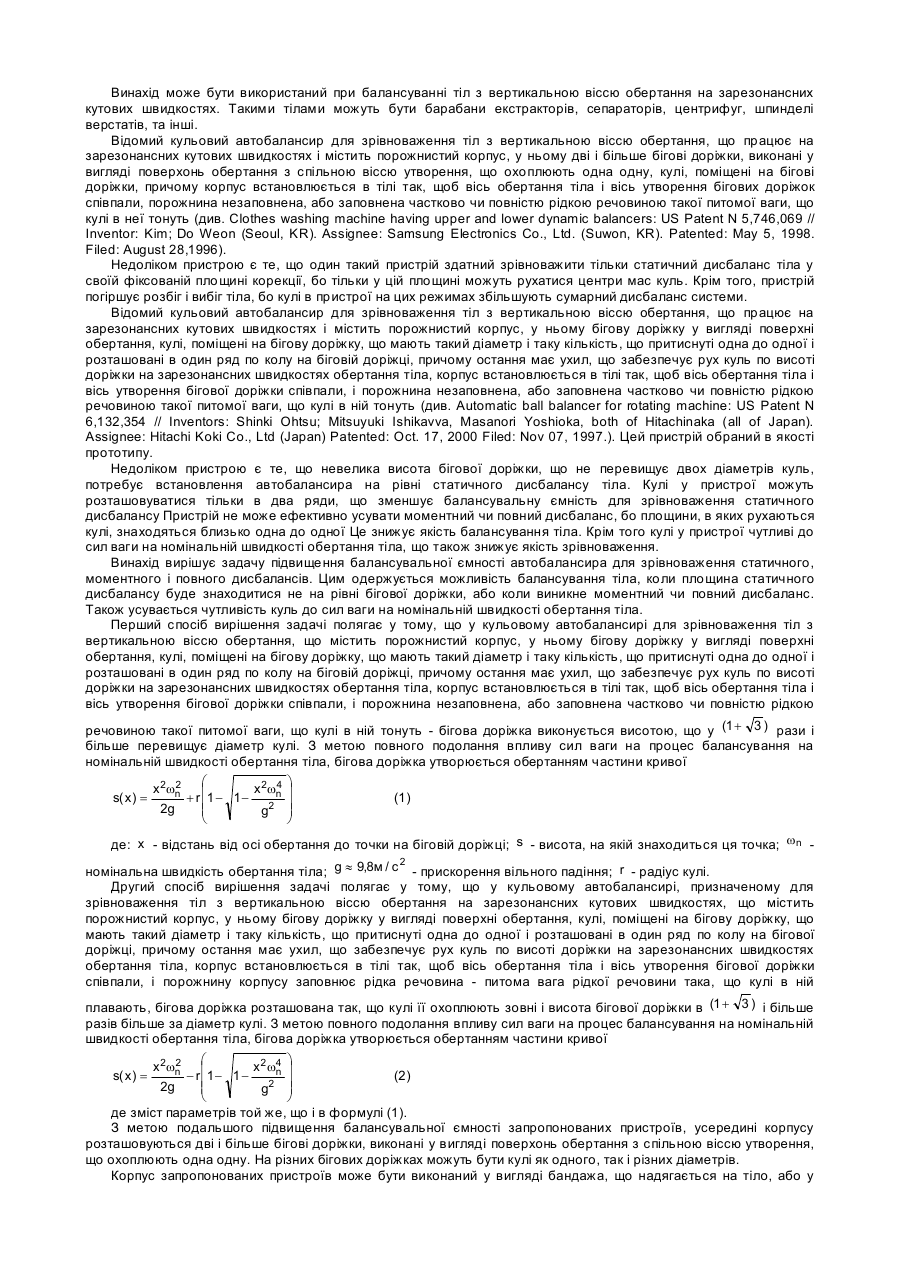
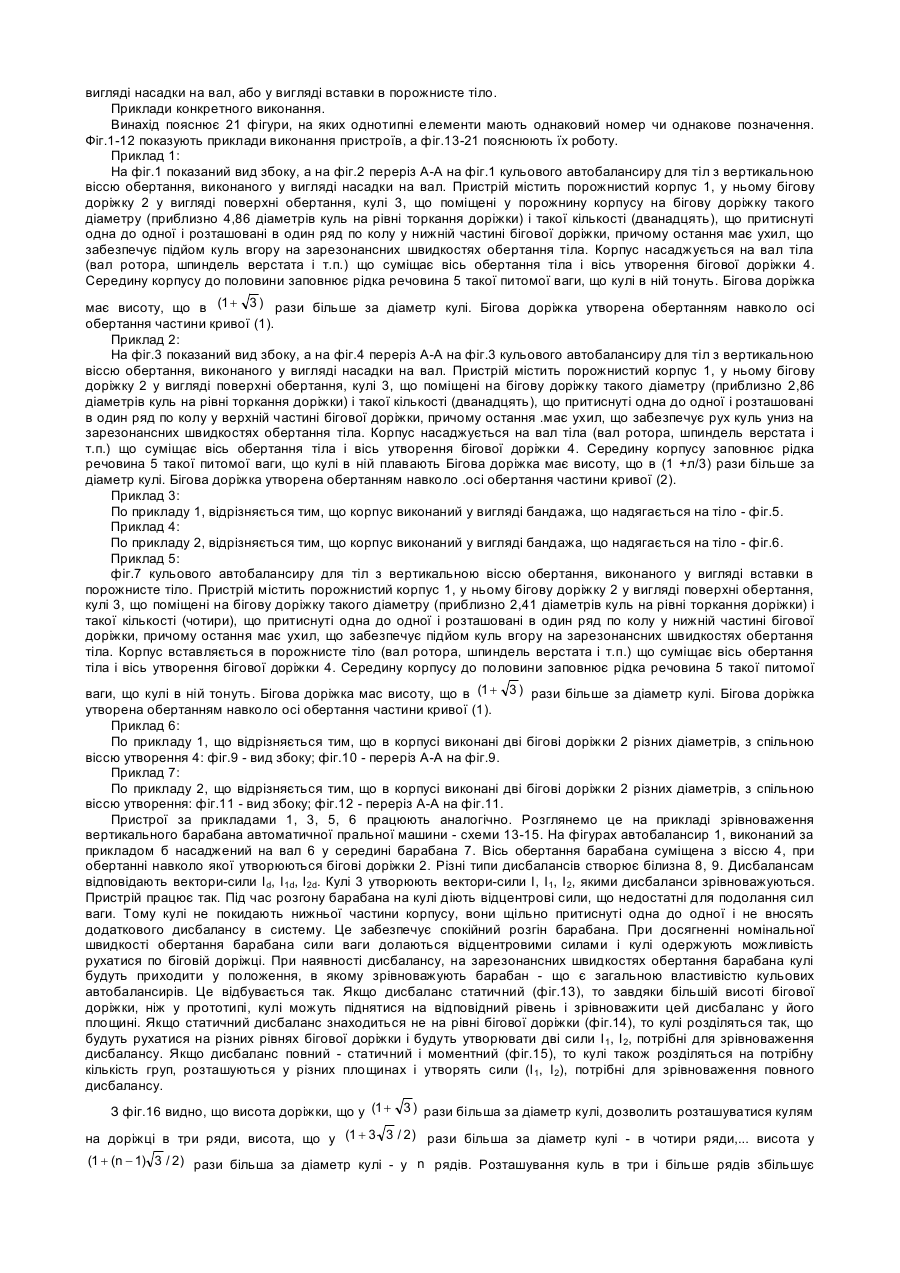
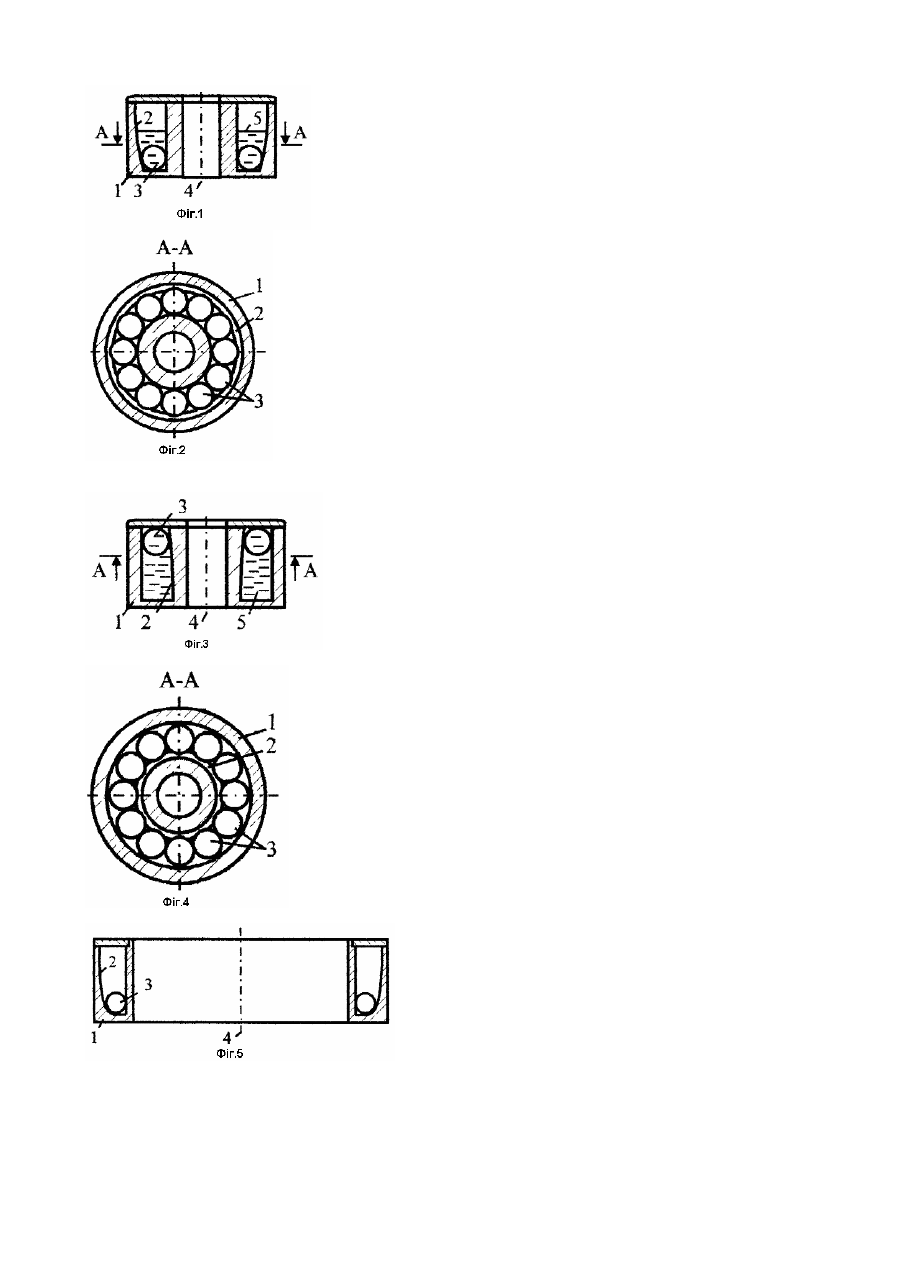
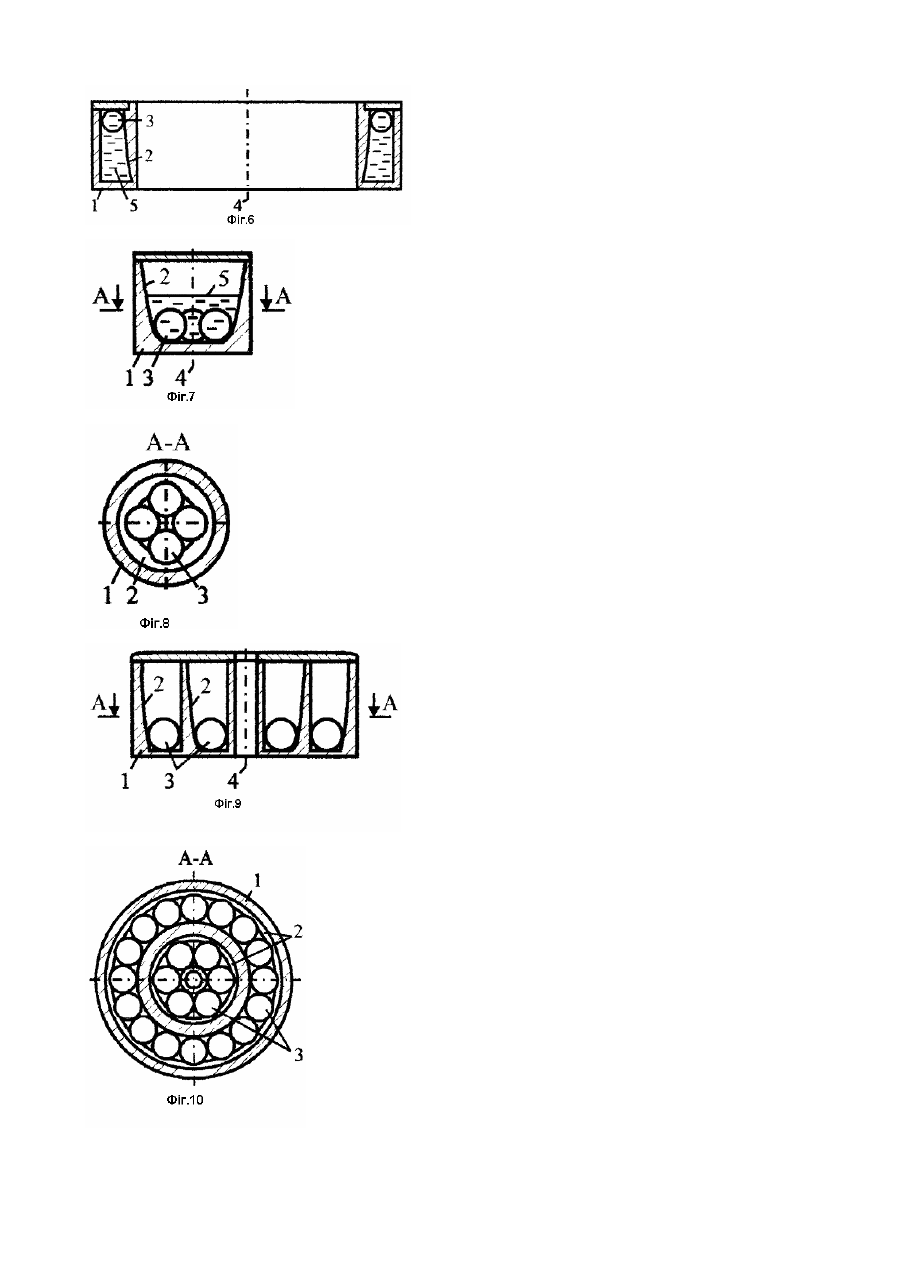
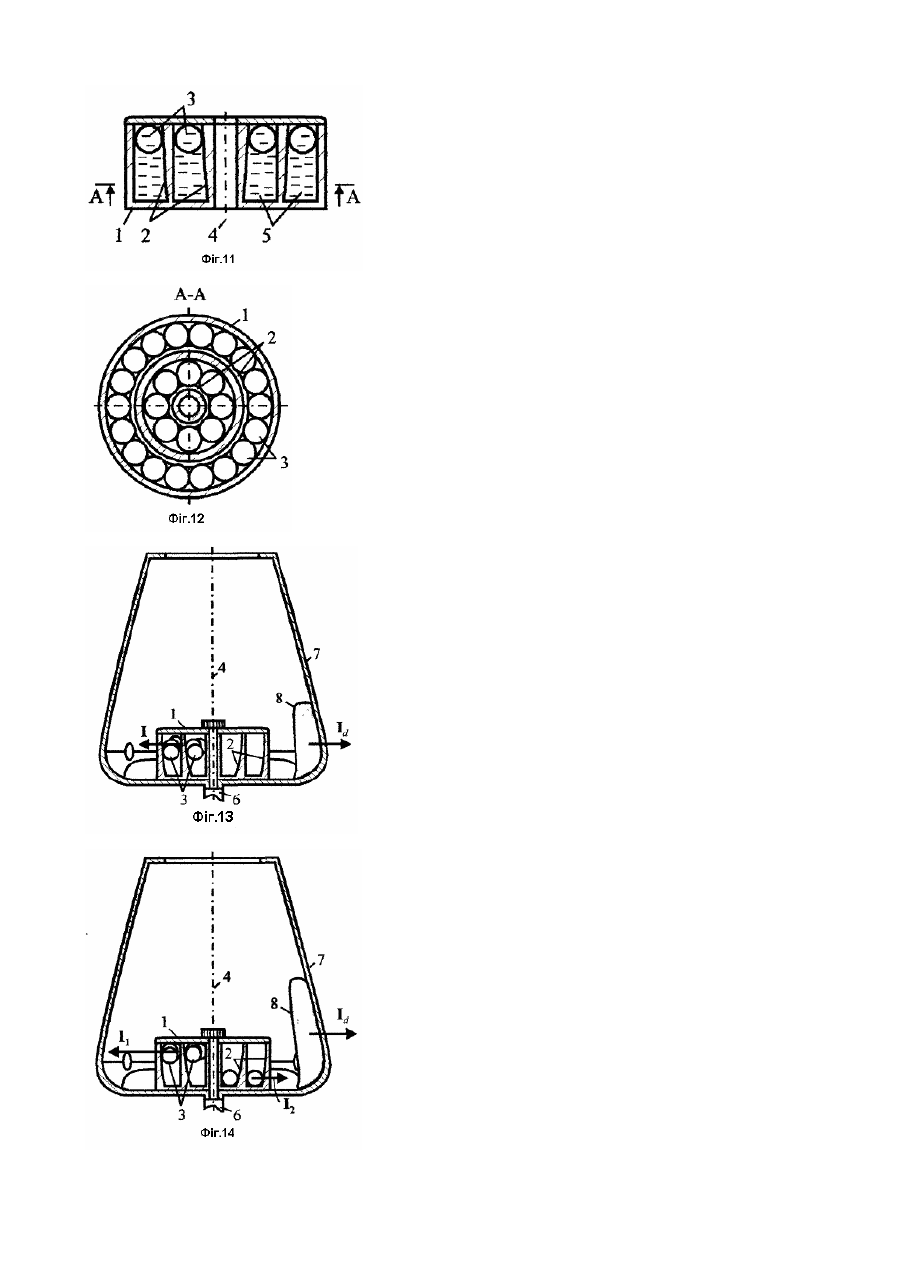
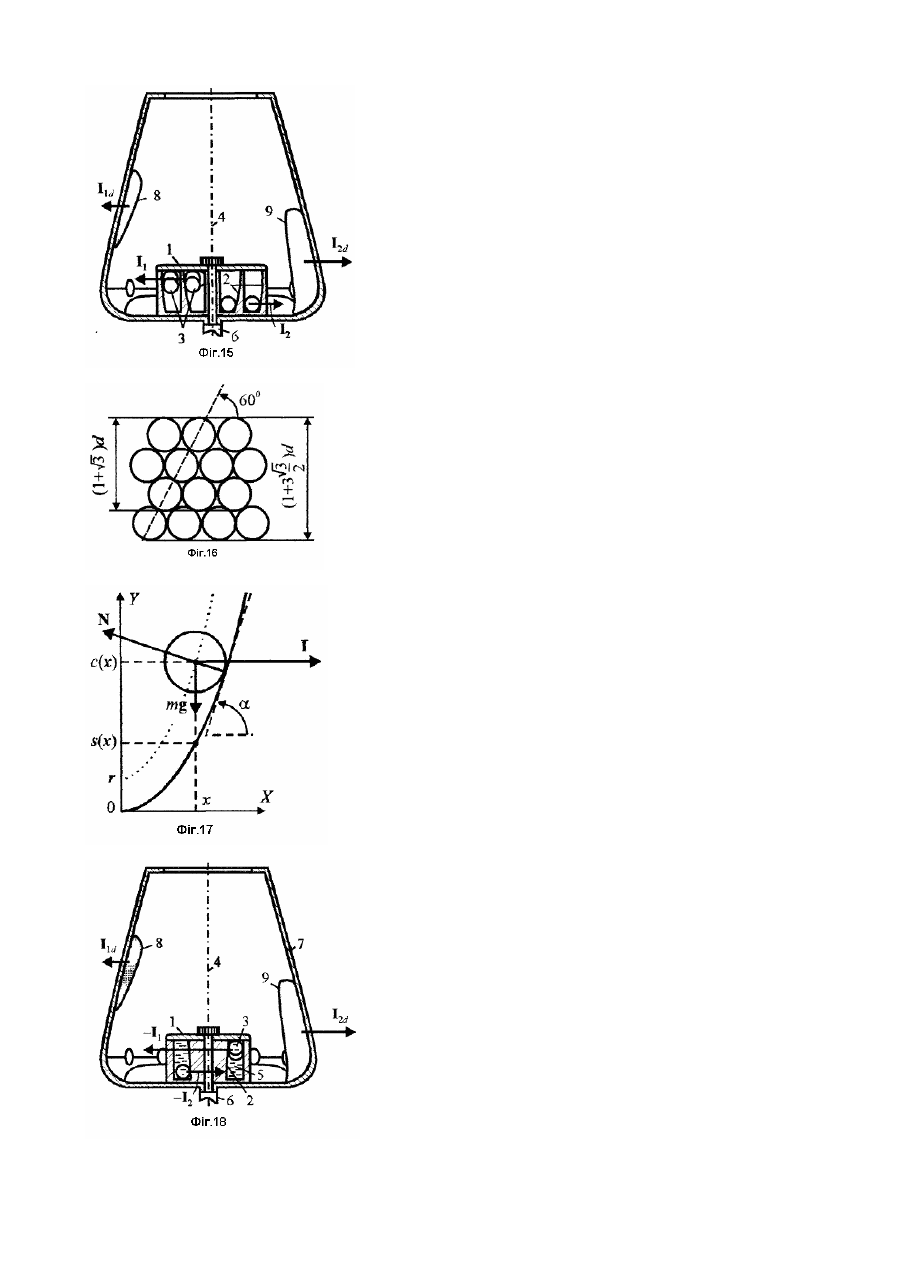
Винахід може бути використаний при балансуванні тіл з вертикальною віссю обертання на зарезонансних кутових швидкостях. Такими тілами можуть бути барабани екстракторів, сепараторів, центрифуг, шпинделі верстатів, та інші. Відомий кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання, що працює на зарезонансних кутових швидкостях і містить порожнистий корпус, у ньому дві і більше бігові доріжки, виконані у вигляді поверхонь обертання з спільною віссю утворення, що охоплюють одна одну, кулі, поміщені на бігові доріжки, причому корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігових доріжок співпали, порожнина незаповнена, або заповнена частково чи повністю рідкою речовиною такої питомої ваги, що кулі в неї тонуть (див. Clothes washing machine having upper and lower dynamic balancers: US Patent N 5,746,069 // Inventor: Kim; Do Weon (Seoul, KR). Assignee: Samsung Electronics Co., Ltd. (Suwon, KR). Patented: May 5, 1998. Filed: August 28,1996). Недоліком пристрою є те, що один такий пристрій здатний зрівноважити тільки статичний дисбаланс тіла у своїй фіксованій площині корекції, бо тільки у цій площині можуть рухатися центри мас куль. Крім того, пристрій погіршує розбіг і вибіг тіла, бо кулі в пристрої на цих режимах збільшують сумарний дисбаланс системи. Відомий кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання, що працює на зарезонансних кутових швидкостях і містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, поміщені на бігову доріжку, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на біговій доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігової доріжки співпали, і порожнина незаповнена, або заповнена частково чи повністю рідкою речовиною такої питомої ваги, що кулі в ній тонуть (див. Automatic ball balancer for rotating machine: US Patent N 6,132,354 // Inventors: Shinki Ohtsu; Mitsuyuki Ishikavva, Masanori Yoshioka, both of Hitachinaka (all of Japan). Assignee: Hitachi Koki Co., Ltd (Japan) Patented: Oct. 17, 2000 Filed: Nov 07, 1997.). Цей пристрій обраний в якості прототипу. Недоліком пристрою є те, що невелика висота бігової доріжки, що не перевищує двох діаметрів куль, потребує встановлення автобалансира на рівні статичного дисбалансу тіла. Кулі у пристрої можуть розташовуватися тільки в два ряди, що зменшує балансувальну ємність для зрівноваження статичного дисбалансу Пристрій не може ефективно усувати моментний чи повний дисбаланс, бо площини, в яких рухаються кулі, знаходяться близько одна до одної Це знижує якість балансування тіла. Крім того кулі у пристрої чутливі до сил ваги на номінальній швидкості обертання тіла, що також знижує якість зрівноваження. Винахід вирішує задачу підвищення балансувальної ємності автобалансира для зрівноваження статичного, моментного і повного дисбалансів. Цим одержується можливість балансування тіла, коли площина статичного дисбалансу буде знаходитися не на рівні бігової доріжки, або коли виникне моментний чи повний дисбаланс. Також усувається чутливість куль до сил ваги на номінальній швидкості обертання тіла. Перший спосіб вирішення задачі полягає у тому, що у кульовому автобалансирі для зрівноваження тіл з вертикальною віссю обертання, що містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, поміщені на бігову доріжку, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на біговій доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігової доріжки співпали, і порожнина незаповнена, або заповнена частково чи повністю рідкою речовиною такої питомої ваги, що кулі в ній тонуть - бігова доріжка виконується висотою, що у (1 + 3 ) рази і більше перевищує діаметр кулі. З метою повного подолання впливу сил ваги на процес балансування на номінальній швидкості обертання тіла, бігова доріжка утворюється обертанням частини кривої æ ö 2 x2wn x2w4 ÷ ç s( x) = (1) + r ç1 - 1- 2 n ÷ 2g ç g ÷ è ø де: x - відстань від осі обертання до точки на біговій доріжці; s - висота, на якій знаходиться ця точка; wn 2 номінальна швидкість обертання тіла; g » 9,8м / с - прискорення вільного падіння; r - радіус кулі. Другий спосіб вирішення задачі полягає у тому, що у кульовому автобалансирі, призначеному для зрівноваження тіл з вертикальною віссю обертання на зарезонансних кутових швидкостях, що містить порожнистий корпус, у ньому бігову доріжку у вигляді поверхні обертання, кулі, поміщені на бігову доріжку, що мають такий діаметр і таку кількість, що притиснуті одна до одної і розташовані в один ряд по колу на бігової доріжці, причому остання має ухил, що забезпечує рух куль по висоті доріжки на зарезонансних швидкостях обертання тіла, корпус встановлюється в тілі так, щоб вісь обертання тіла і вісь утворення бігової доріжки співпали, і порожнину корпусу заповнює рідка речовина - питома вага рідкої речовини така, що кулі в ній плавають, бігова доріжка розташована так, що кулі її охоплюють зовні і висота бігової доріжки в (1 + 3 ) і більше разів більше за діаметр кулі. З метою повного подолання впливу сил ваги на процес балансування на номінальній швидкості обертання тіла, бігова доріжка утворюється обертанням частини кривої æ ö 2 x2wn ç x2 w4 ÷ (2) - r ç 1- 1 - 2 n ÷ 2g ç g ÷ è ø де зміст параметрів той же, що і в формулі (1). З метою подальшого підвищення балансувальної ємності запропонованих пристроїв, усередині корпусу розташовуються дві і більше бігові доріжки, виконані у вигляді поверхонь обертання з спільною віссю утворення, що охоплюють одна одну. На різних бігових доріжках можуть бути кулі як одного, так і різних діаметрів. Корпус запропонованих пристроїв може бути виконаний у вигляді бандажа, що надягається на тіло, або у s( x) = вигляді насадки на вал, або у вигляді вставки в порожнисте тіло. Приклади конкретного виконання. Винахід пояснює 21 фігури, на яких однотипні елементи мають однаковий номер чи однакове позначення. Фіг.1-12 показують приклади виконання пристроїв, а фіг.13-21 пояснюють їх роботу. Приклад 1: На фіг.1 показаний вид збоку, а на фіг.2 переріз А-А на фіг.1 кульового автобалансиру для тіл з вертикальною віссю обертання, виконаного у вигляді насадки на вал. Пристрій містить порожнистий корпус 1, у ньому бігову доріжку 2 у вигляді поверхні обертання, кулі 3, що поміщені у порожнину корпусу на бігову доріжку такого діаметру (приблизно 4,86 діаметрів куль на рівні торкання доріжки) і такої кількості (дванадцять), що притиснуті одна до одної і розташовані в один ряд по колу у нижній частині бігової доріжки, причому остання має ухил, що забезпечує підйом куль вгору на зарезонансних швидкостях обертання тіла. Корпус насаджується на вал тіла (вал ротора, шпиндель верстата і т.п.) що суміщає вісь обертання тіла і вісь утворення бігової доріжки 4. Середину корпусу до половини заповнює рідка речовина 5 такої питомої ваги, що кулі в ній тонуть. Бігова доріжка має висоту, що в (1 + 3 ) рази більше за діаметр кулі. Бігова доріжка утворена обертанням навколо осі обертання частини кривої (1). Приклад 2: На фіг.3 показаний вид збоку, а на фіг.4 переріз А-А на фіг.3 кульового автобалансиру для тіл з вертикальною віссю обертання, виконаного у вигляді насадки на вал. Пристрій містить порожнистий корпус 1, у ньому бігову доріжку 2 у вигляді поверхні обертання, кулі 3, що поміщені на бігову доріжку такого діаметру (приблизно 2,86 діаметрів куль на рівні торкання доріжки) і такої кількості (дванадцять), що притиснуті одна до одної і розташовані в один ряд по колу у верхній частині бігової доріжки, причому остання .має ухил, що забезпечує рух куль униз на зарезонансних швидкостях обертання тіла. Корпус насаджується на вал тіла (вал ротора, шпиндель верстата і т.п.) що суміщає вісь обертання тіла і вісь утворення бігової доріжки 4. Середину корпусу заповнює рідка речовина 5 такої питомої ваги, що кулі в ній плавають Бігова доріжка має висоту, що в (1 +л/3) рази більше за діаметр кулі. Бігова доріжка утворена обертанням навколо .осі обертання частини кривої (2). Приклад 3: По прикладу 1, відрізняється тим, що корпус виконаний у вигляді бандажа, що надягається на тіло - фіг.5. Приклад 4: По прикладу 2, відрізняється тим, що корпус виконаний у вигляді бандажа, що надягається на тіло - фіг.6. Приклад 5: фіг.7 кульового автобалансиру для тіл з вертикальною віссю обертання, виконаного у вигляді вставки в порожнисте тіло. Пристрій містить порожнистий корпус 1, у ньому бігову доріжку 2 у вигляді поверхні обертання, кулі 3, що поміщені на бігову доріжку такого діаметру (приблизно 2,41 діаметрів куль на рівні торкання доріжки) і такої кількості (чотири), що притиснуті одна до одної і розташовані в один ряд по колу у нижній частині бігової доріжки, причому остання має ухил, що забезпечує підйом куль вгору на зарезонансних швидкостях обертання тіла. Корпус вставляється в порожнисте тіло (вал ротора, шпиндель верстата і т.п.) що суміщає вісь обертання тіла і вісь утворення бігової доріжки 4. Середину корпусу до половини заповнює рідка речовина 5 такої питомої ваги, що кулі в ній тонуть. Бігова доріжка мас висоту, що в (1 + 3 ) рази більше за діаметр кулі. Бігова доріжка утворена обертанням навколо осі обертання частини кривої (1). Приклад 6: По прикладу 1, що відрізняється тим, що в корпусі виконані дві бігові доріжки 2 різних діаметрів, з спільною віссю утворення 4: фіг.9 - вид збоку; фіг.10 - переріз А-А на фіг.9. Приклад 7: По прикладу 2, що відрізняється тим, що в корпусі виконані дві бігові доріжки 2 різних діаметрів, з спільною віссю утворення: фіг.11 - вид збоку; фіг.12 - переріз А-А на фіг.11. Пристрої за прикладами 1, 3, 5, 6 працюють аналогічно. Розглянемо це на прикладі зрівноваження вертикального барабана автоматичної пральної машини - схеми 13-15. На фігурах автобалансир 1, виконаний за прикладом б насаджений на вал 6 у середині барабана 7. Вісь обертання барабана суміщена з віссю 4, при обертанні навколо якої утворюються бігові доріжки 2. Різні типи дисбалансів створює білизна 8, 9. Дисбалансам відповідають вектори-сили І d, І 1d, І 2d. Кулі 3 утворюють вектори-сили І, І 1, І 2, якими дисбаланси зрівноважуються. Пристрій працює так. Під час розгону барабана на кулі діють відцентрові сили, що недостатні для подолання сил ваги. Тому кулі не покидають нижньої частини корпусу, вони щільно притиснуті одна до одної і не вносять додаткового дисбалансу в систему. Це забезпечує спокійний розгін барабана. При досягненні номінальної швидкості обертання барабана сили ваги долаються відцентровими силами і кулі одержують можливість рухатися по біговій доріжці. При наявності дисбалансу, на зарезонансних швидкостях обертання барабана кулі будуть приходити у положення, в якому зрівноважують барабан - що є загальною властивістю кульових автобалансирів. Це відбувається так. Якщо дисбаланс статичний (фіг.13), то завдяки більшій висоті бігової доріжки, ніж у прототипі, кулі можуть піднятися на відповідний рівень і зрівноважити цей дисбаланс у його площині. Якщо статичний дисбаланс знаходиться не на рівні бігової доріжки (фіг.14), то кулі розділяться так, що будуть рухатися на різних рівнях бігової доріжки і будуть утворювати дві сили І 1, І 2, потрібні для зрівноваження дисбалансу. Якщо дисбаланс повний - статичний і моментний (фіг.15), то кулі також розділяться на потрібну кількість груп, розташуються у різних площинах і утворять сили (І 1, І 2), потрібні для зрівноваження повного дисбалансу. З фіг.16 видно, що висота доріжки, що у (1 + 3 ) рази більша за діаметр кулі, дозволить розташуватися кулям на доріжці в три ряди, висота, що у (1 + 3 3 / 2 ) рази більша за діаметр кулі - в чотири ряди,... висота у (1 + (n - 1) 3 / 2 ) рази більша за діаметр кулі - у n рядів. Розташування куль в три і більше рядів збільшує балансувальну ємність пристрою, призначену для зрівноваження статичного дисбалансу, бо при розташуванні в декілька рядів спільний центр мас куль більше віддаляється у легкий бік тіла, ніж при розташуванні куль у два ряди, як у прототипі. Висоти доріжок, що перевищують діаметри куль у (1 + (n - 1) 3 / 2 ) разів, є оптимальними, бо при найменшій висоті доріжки, а значить і габаритах пристрою, забезпечують розташування куль у я рядів. Балансувальна ємність для зрівноваження моментного дисбалансу збільшиться завдяки тому, що кулі одержать можливість рухатися у паралельних площинах, відстань між якими збільшена із за збільшення висоти бігової доріжки. Коли кулі займуть положення, в якому зрівноважують барабан, то вісь утворення бігових доріжок суміститься з віссю обертання. Завдяки формі бігової доріжки, утвореної обертанням частини кривої (1) кулі будуть перебувати у рівновазі у будь-якому положенні на біговій доріжці, тобто вплив сил ваги буде повністю подоланий. Це пояснює фіг.17. На схемі зображена куля, що перебуває у рівновазі на біговій доріжці під дією трьох векторів2 сил: сили ваги mg , де m - маса кулі; відцентрової сили І, де I = mxwn ; реакції доріжки N. З фіг. видно, що 2 2 mxwn xwn I = = , mg mg g де a - кут нахилу дотичної до кривий, яка утворює бігову доріжку у місці торкання кулі і зміст решти позначень розкритий раніше. З іншого боку tga = xw2 dc( x ) n , tga = g dx де c ( x ) - крива, по який рухається центр кулі при підйомі по доріжці. Інтегрування дає таке рівняння x 2w2 n + const. 2g Оскільки c ( 0 ) = r , то const = r , і c(x ) = x 2 w2 n + r. 2g З фіг.17 знаходимо рівняння кривої, що утворює бігову доріжку s( x ) = c ( x ) - r / cos a. Оскільки c(x ) = 1 / cos a = 1 + tg 2 a = 1 + x 2w4 n , g2 то остаточно рівняння кривої, що утворює бігову доріжку має вигляд æ ö 2 x 2 wn x 2w4 ÷ ç n + rç1 - 1 + ÷, 2g ç g2 ÷ è ø тобто співпадає з рівнянням (1). Тому при обертанні барабана з номінальною швидкістю обертання, завдяки формі доріжки, дія сил ваги на кулі буде повністю долатися на всій доріжці і кулі одержать можливість перебувати у рівновазі у будь-якому місці на доріжці. При вибігу барабана, з падінням кутової швидкості обертання, вплив сил ваги буде зростати і кулі будуть поступово опускатися на дно доріжки Це забезпечить повільне виключення автобалансира при наближенні до резонансної швидкості обертання барабана і забезпечить спокійний вибіг. Пристрої за прикладами 2, 4, 7 працюють аналогічно таким способом (фіг.18, пристрій за прикладом 2) Кулі 3 знаходяться у важкий рідкий речовині 5 і мають від'ємну масу - т, яка дорівнює різниці між масою кулі і масою такої частини рідкої речовини, яка має об'єм кулі. Від'ємні маси створюють від'ємні сили інерції – І 1, І 2. Під час розгону барабана 7 на кулі діють відцентрові сили, що недостатні для подолання від'ємної сили ваги. Тому вони щільно притиснуті одна до одної, знаходяться у вихідному положенні і не вносять додаткового дисбалансу в систему Це забезпечує спокійний розгін При досягненні номінальної швидкості обертання барабана від'ємні сили ваги долаються відцентровими силами і кулі одержують можливість рухатися по біговій доріжці униз. При наявності дисбалансу, на зарезонансних швидкостях обертання барабана кулі будуть приходити у положення, в якому зрівноважують барабан - що є загальною властивістю кульових автобалансирів (фіг.18). Це відбувається так само, як і у пристроях за попередніми прикладами. Коли кулі займуть положення, в якому зрівноважують барабан, то вісь бігових доріжок суміститься з віссю обертання. Завдяки ухилу бігової доріжки кулі будуть перебувати у рівновазі у будь-якому положенні на біговій доріжці. Це пояснює фіг.19. З її використанням можна одержати рівняння кривої (2), що утворює доріжку. Причому формула (2) виводиться аналогічно формулі (1). При вибігу барабана, з падінням кутової швидкості обертання, вплив від'ємної сили ваги буде зростати і кулі будуть поступово підніматися в верхню частину бігової доріжки. Це забезпечить повільне виключення автобалансира при наближенні до резонансної швидкості обертання і забезпечить спокійний вибіг барабана. Фіг.20 ілюструє зрівноваження динамічного дисбалансу барабана пральної машини пристроєм, виконаним за прикладом 3 у вигляді бандажа 1. Фіг.21 ілюструє зрівноваження швидкісної торцевої фрези двома пристроями, виконаними за прикладом 5. На схемі автобалансири виконані у вигляді вставок 1 і розміщені усередині порожнистого шпинделя 10, який утримують підшипники 11. На торець шпинделя насаджена голівка фрези 12, що несе зуб 13, який створює дисбаланс. Сила інерції дисбалансу І d зрівноважується силами інерції І 1, I 2, які створюють кулі. s( x ) =
ДивитисяДодаткова інформація
Назва патенту англійськоюBall device for automatically balancing a body rotating about its vertical axis (variants)
Автори англійськоюFilimonikhin Hennadiy Borysovych
Назва патенту російськоюШариковое устройство для автоматического уравновешивания объекта, вращающегося вокруг своей вертикальной оси (варианты)
Автори російськоюФилимонихин Геннадий Борисович
МПК / Мітки
Мітки: обертання, тіл, віссю, зрівноваження, вертикальною, кульовий, варіанти, автобалансир
Код посилання
<a href="https://ua.patents.su/8-64922-kulovijj-avtobalansir-dlya-zrivnovazhennya-til-z-vertikalnoyu-vissyu-obertannya-varianti.html" target="_blank" rel="follow" title="База патентів України">Кульовий автобалансир для зрівноваження тіл з вертикальною віссю обертання /варіанти/</a>
Вітродвигун з вертикальною віссю обертання (варіанти)
Номер патенту: 15462
Опубліковано: 30.06.1997
Автори: Попов Сергій Леонідович, Борисенко Юрій Сергійович
МПК: F03D 3/06
Мітки: вітродвигун, вертикальною, варіанти, обертання, віссю
Формула / Реферат:
1. Ветродвигатель с вертикальной осью вращения, содержащий центральную опору, жесткое ветроколесо с лопастями, раскрепленное тяжами на оголовок, соединенный с валом электрогенератора, отличающийся тем, что между оголовком ветроколеса и валом электрогенератора расположен вертикальный вал, соединенный с оголовком ветроколеса шарниром карданной передачи, расположенным выше центра тяжести ветроколеса, а лопасти установлены с постоянным углом...
Вітродвигун з вертикальною віссю обертання
Номер патенту: 13993
Опубліковано: 25.04.1997
Автори: Науменко Володимир Якович, Мойсеєнко Олександр Олегович, Чумак Микола Григорович
МПК: F03D 3/00, F03D 1/00, F03D 3/06
Мітки: вертикальною, віссю, обертання, вітродвигун
Формула / Реферат:
Вітродвигун з вертикальною віссю обертання, який складається з порожнинного конічного ротора з робочими елементами, направленого вершиною уверх від установочної поверхні та закріпленого на штанзі, має привод, зв'язаний з ротором, який відрізняється тим, що робочі елементи виконані у вигляді лопатей, закріплених на осі ротора, і мають у площині, перпендикулярній осі обертання ротора, евольвентну форму.
Вітродвигун з вертикальною віссю обертання

Номер патенту: 61447
Опубліковано: 17.11.2003
Автори: Карманова Вікторія Вікторовна, Юдін Роман Юрійович, Карманов Сергій Вікторович, Карманов Віктор Васильович, Домбровська Людмила Антонівна
Мітки: віссю, вітродвигун, вертикальною, обертання
Формула / Реферат:
Вітродвигун з вертикальною віссю обертання, який складається з закріпленого на штанзі з можливістю обертання порожнистого ротора з робочими елементами, виконаними у вигляді лопатей, які мають у площині, перпендикулярній осі обертання ротора, евольвентну форму, який відрізняється тим, що ротор має непарну кількість робочих елементів, виконаних у вигляді лопатей суцільно-комбінованої форми, які в площині, паралельній осі обертання ротора, мають...
Вітродвигун з вертикальною віссю обертання
Номер патенту: 35051
Опубліковано: 15.03.2001
Автор: Щербатюк Віктор Маркович
МПК: F03D 3/00
Мітки: віссю, вертикальною, обертання, вітродвигун
Формула / Реферат:
1. Вітродвигун з вертикальною віссю обертання, який має вертикальний вал або ротор, до якого приєднані радіальні махи. забезпечені упорами, та лопаті, шарнірно з'єднані з махами з можливістю обертання навколо махів та циклічної взаємодії з упорами, який відрізняється тим, що махи лопатей відхилені на гострий кут вниз від горизонтальної площини.2. Вітродвигун за п.1, який відрізняється тим, що упори виконані у вигляді підпорних...
Вітрова енергетична установка з вертикальною віссю обертання
Номер патенту: 472
Опубліковано: 29.12.1999
Автори: Михайлов Валерій Олександрович, Костюков Ігор Юрійович, Варава Сергій Іванович
МПК: F03D 3/00
Мітки: віссю, енергетична, вітрова, установка, вертикальною, обертання
Формула / Реферат:
1. Вітрова енергетична установка з вертикальною віссю обертання, що включає вітрову турбіну, трансмісійну систему з тихохідним валом, генератор, автоматичну систему керування і контролю, і споруду з опорною баштою і, принаймні, однією опорною рамою, яка відрізняється тим, що вона додатково має мультиплікатор, з'єднаний через зубчасту муфту з тихохідним валом і через втулково-пальцеву муфту з генератором, при цьому тихохідний вал виконаний...
Попередній патент: Спосіб прогнозування ефективності бета-блокатора у хворих із хронічною серцевою недостатністю
Наступний патент: Перфораторна бурова коронка з твердосплавними вставками для її оснащення
Випадковий патент: Система розподілу потужності з індивідуально ізольованими функціональними зонами