Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства, на полях, які зрошуються дощувальними машинами кругової дії
Формула / Реферат
1. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії, що включає ведення посівних та збиральних агрегатів по дугоподібній колії, яка фіксується системою керованого землеробства, якою обладнують енергетичний засіб агрегату, який відрізняється тим, що поле, яке обробляють посівні та збиральні агрегати, має форму круга, в центрі поля, який є також і центром обороту дощувальної машини, яка зрошує це поле, встановлюють додатково спеціальний прилад для отримання стабільного супутникового сигналу.
2. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії за п. 1, який відрізняється тим, що для більш повного співпадання площі поля, яке обробляють посівні та збиральні агрегати, які рухаються по спіралі Архімеда, з площею зрошення, яке виконують дощувальні машини кругової дії, крок спіралі Архімеда дорівнює робочій ширині захвату посівних та збиральних агрегатів, при цьому площа зрошення може наближатися до оптимальної величини площі обробітку шляхом зміни робочої ширини захвату дощувальної машини кругової дії.
3. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії за п. 1, який відрізняється тим, що робота всіх агрегатів, які працюють на одному полі, що має форму круга, узгоджена між собою в часі та просторі: перед початком роботи на полі посівних та збиральних агрегатів, які рухаються по спіралі Архімеда, дощувальну машину кругової дії транспортують за межі цього поля.
Текст
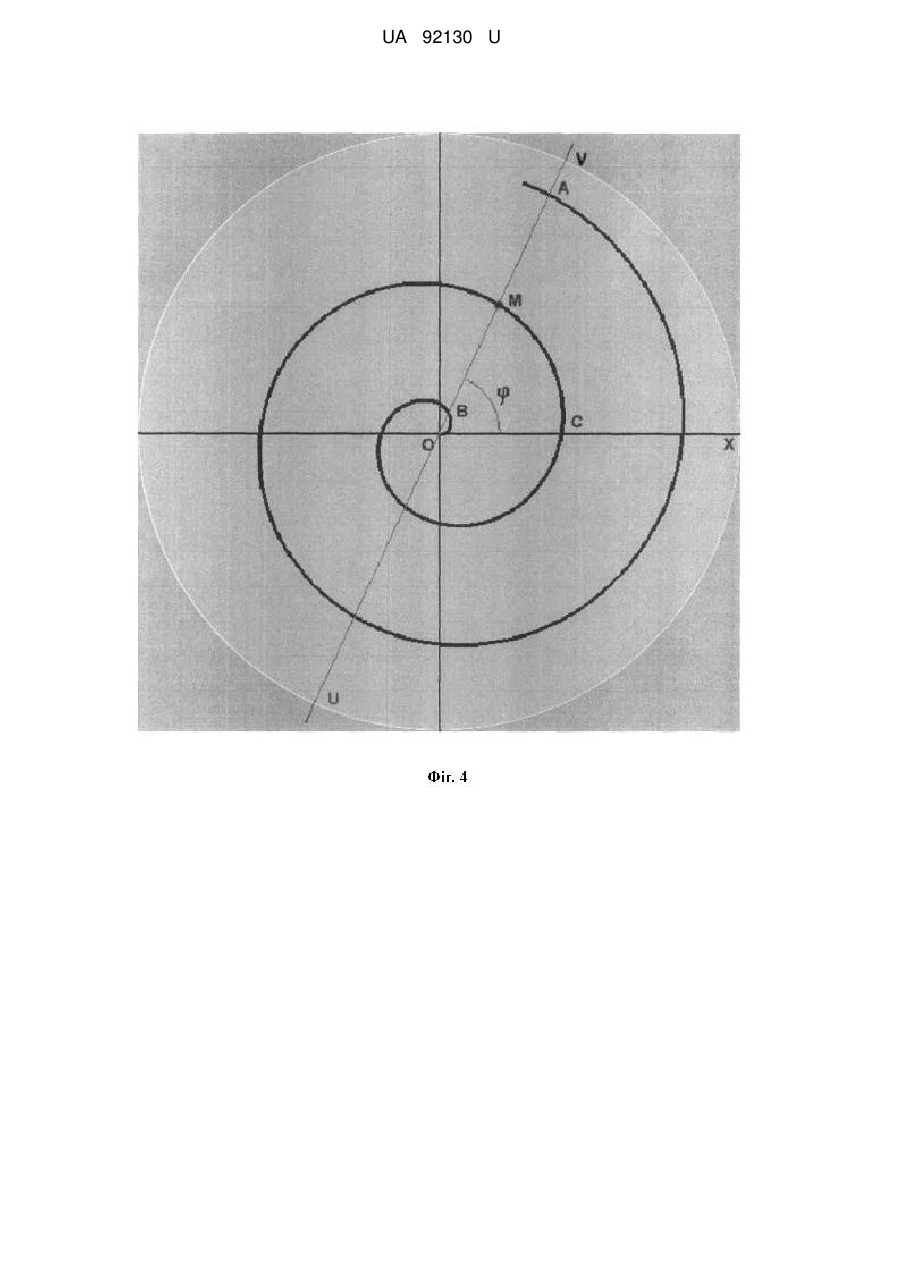
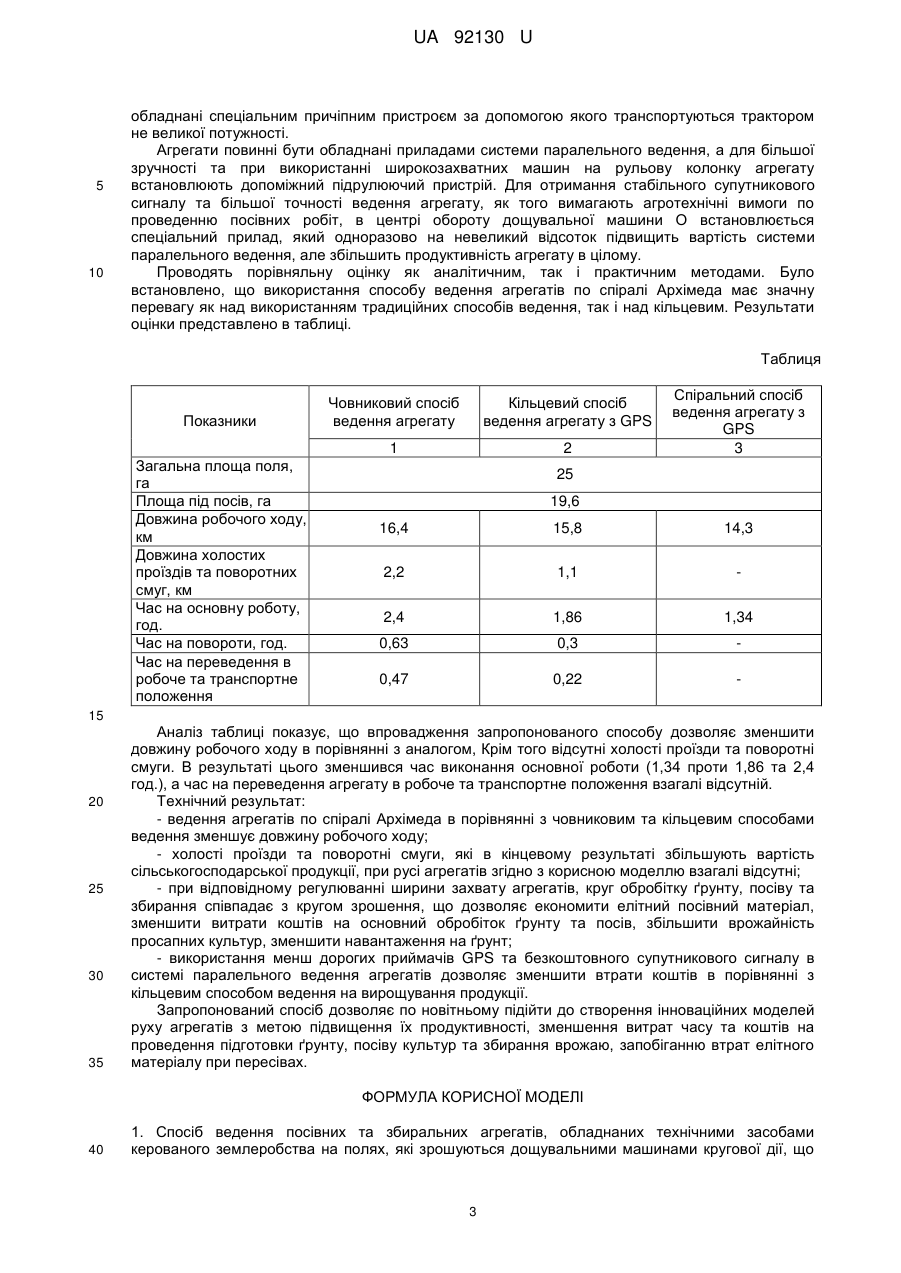
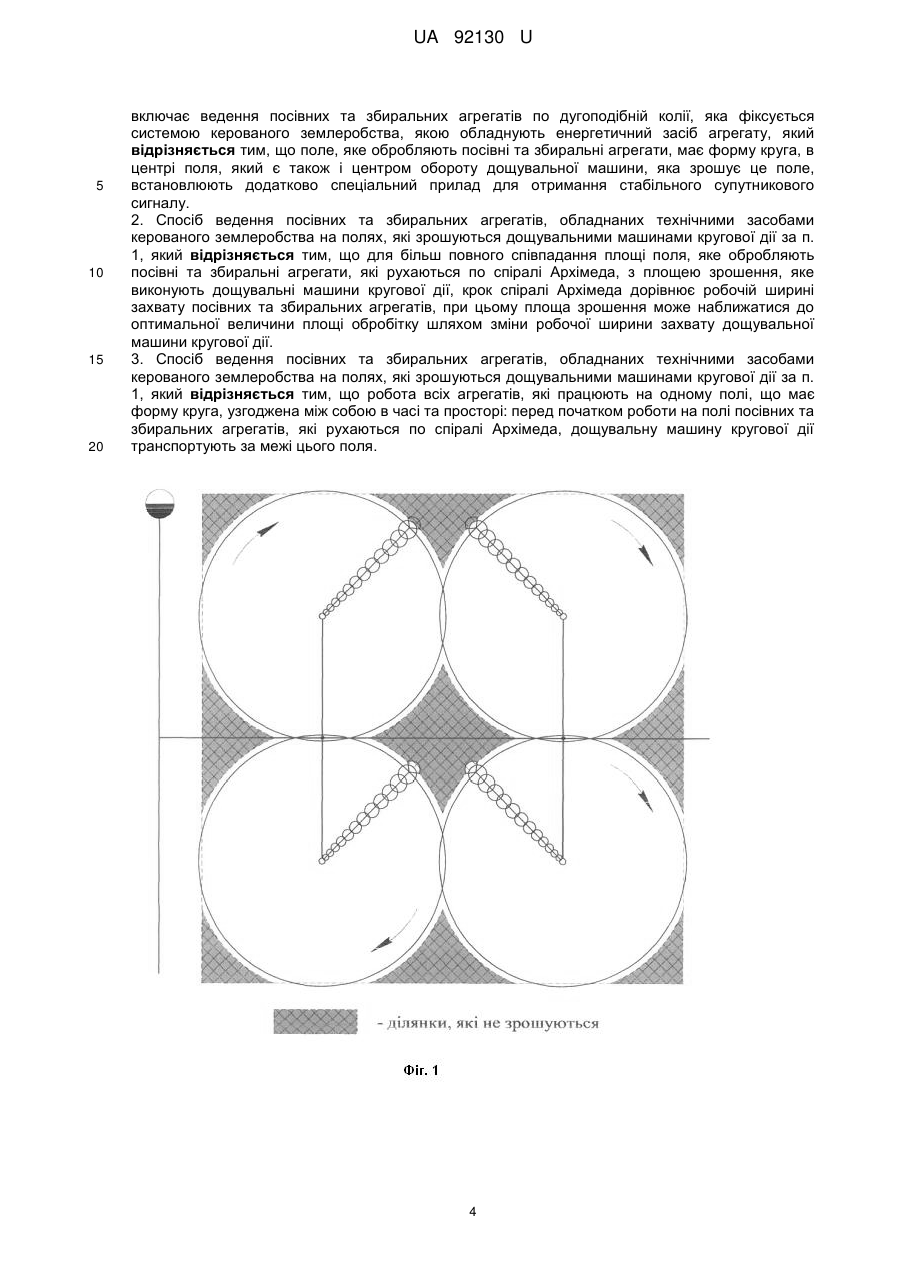
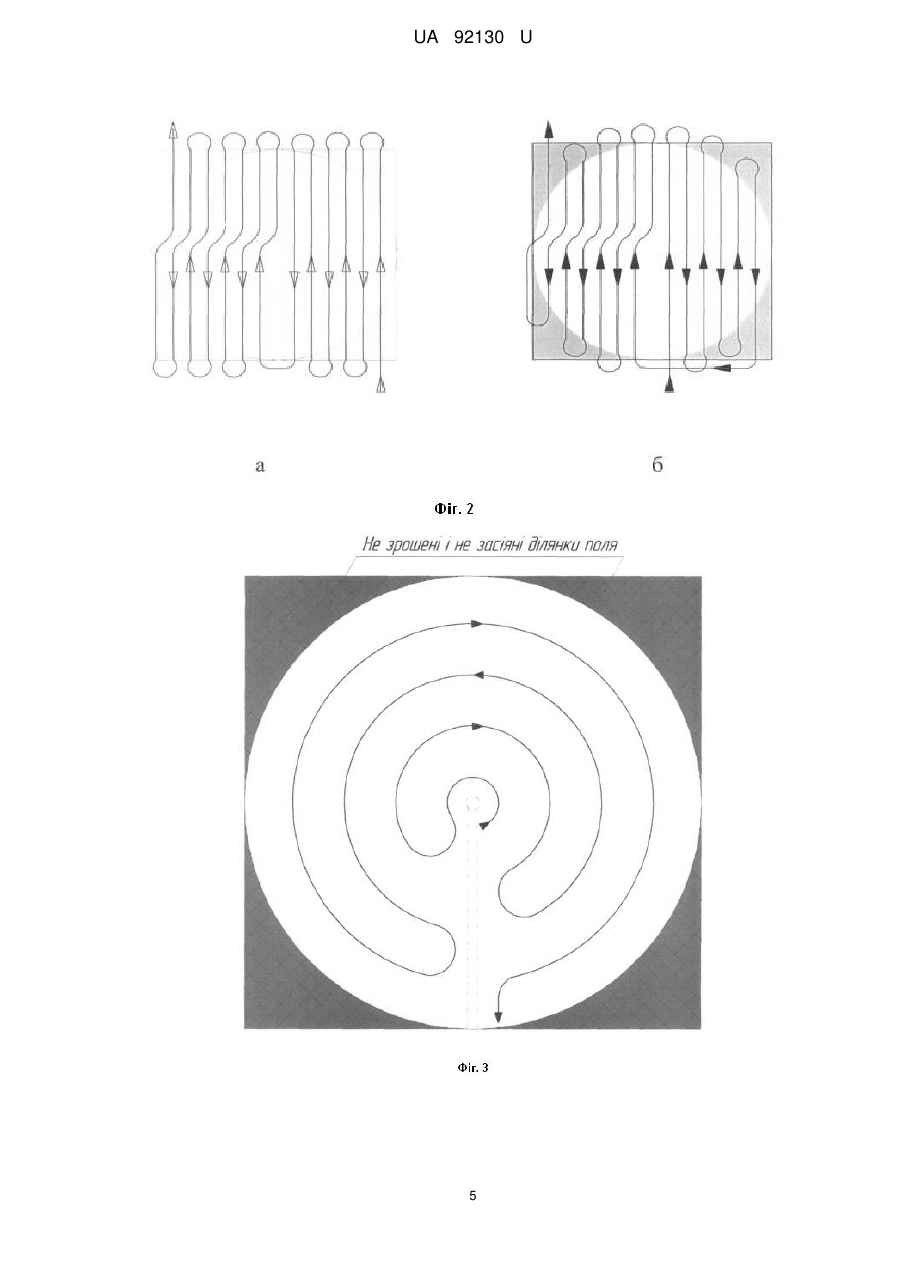
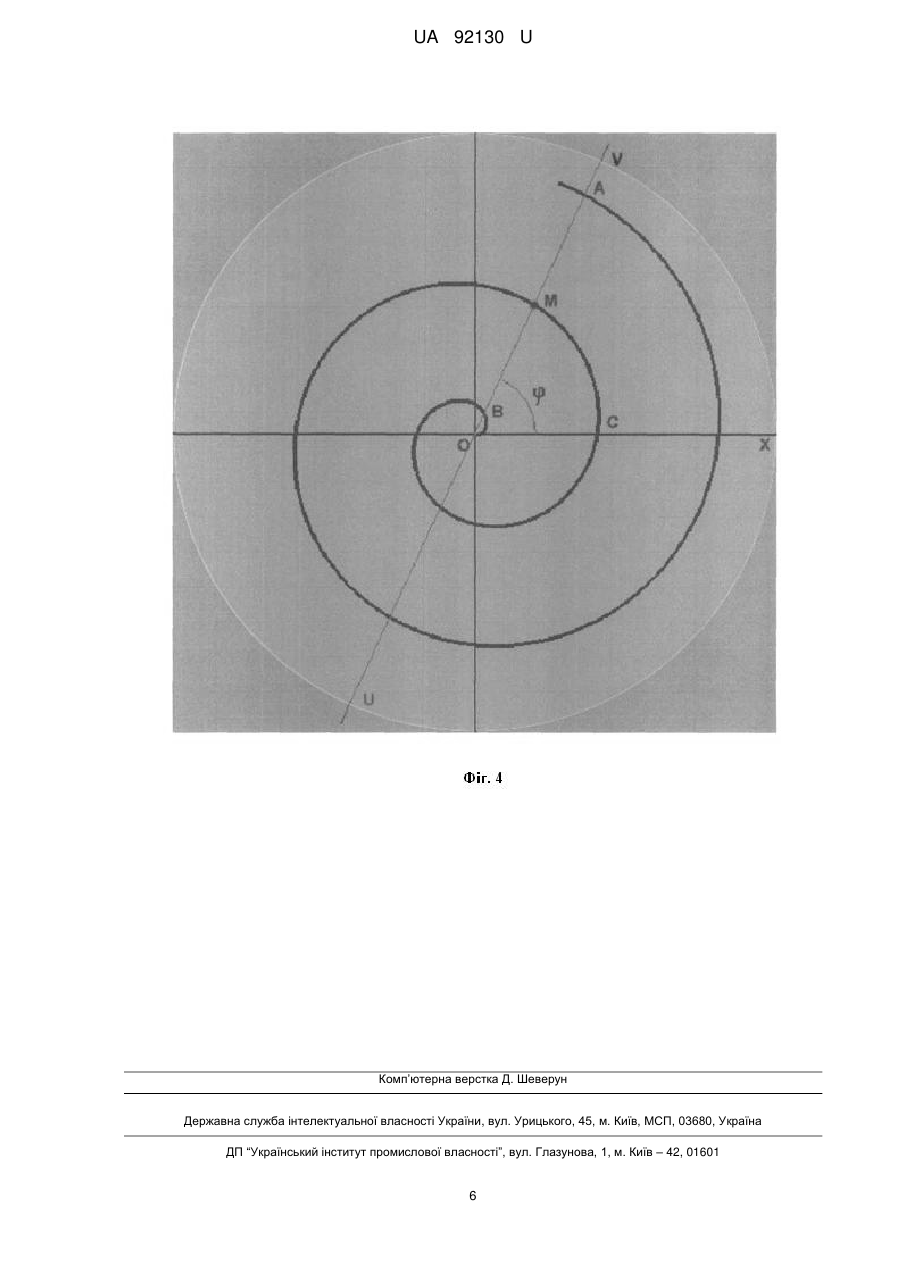
Реферат: Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії, включає ведення посівних та збиральних агрегатів по дугоподібній колії, яка фіксується системою керованого землеробства, якою обладнують енергетичний засіб агрегату. Поле, яке обробляють посівні та збиральні агрегати, має форму круга, в центрі поля, який є також і центром обороту дощувальної машини, яка зрошує це поле. Встановлюють додатково спеціальний прилад для отримання стабільного супутникового сигналу. UA 92130 U (12) UA 92130 U UA 92130 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі сільського господарства, до технологій обробітку ґрунту, посіву та вирощування сільськогосподарських культур на зрошуваних полях Півдня України. На Півдні України, особливо в степовій зоні, вирощування сільськогосподарської продукції неможливо без застосування зрошення. На полях, які зрошуються дощувальними машинами, можна одержувати високі врожаї зернових та просапних культур, овочевої та інших видів продукції навіть незважаючи на засуху та високу температуру повітря. За технологічною схемою поливу дощувальні машини можна розділили на дощувальні машини фронтальної дії, які здійснюють забір води по шлангу з гідрантів закритої зрошувальної мережі або ж з відкритих джерел водопостачання та дощувальні машини кругової дії, які набір води здійснюють з гідрату, який в свою чергу є центром обороту всієї машини. Традиційно склалося, що поля, які готують під посів, мають прямокутну форму, що зручно для проведення основного обробітку ґрунту та посіву. Проблему зрошення таких площ здатні вирішити широкозахватні високопродуктивні дощувальні машини фронтальної дії, які являються економічними в співвідношенні якості поливу до трудомісткості і енергетичних затрат на їх використання. Проте досвід експлуатації дощувальних машин засвідчує, що за питомими показниками експлуатаційної надійності, енергоємності і вартості найбільш ефективним є використання дощувальних машин кругового дії. Для прикладу, в США більше 50 % складають землі, що зрошуються саме машинами кругової дії. При використання дощувальних машин кругової дії існують певні проблеми, які з'являються при виконані агротехнічних операцій, особливо це виражено при проведенні посівних робіт. Дощувальні машини кругової дії, здійснюючи забір води з гідранту, який є центром обороту всієї машини, зрошують площу поля, яка має форму круга. Якщо поле має форму прямокутника, в яку буде вписано круг поливу, то в кутах прямокутного поля з'являються ділянки, які залишаться не зрошеними, проте які були засіяні, Це пояснюється кресленням (Фіг. 1) Отже, на цих ділянках маємо втрати елітного посівного матеріалу. Ці ділянки потім культивують та засівають культурами, які більш стійкі до посушливого клімату та не вимагають інтенсивного зрошення. Тому перед виробниками сільськогосподарської продукції постає нагальне завдання перейти до такого способу ведення агрегатів по полю під час обробітку фунту та посіву, щоб ділянки, які не попадають в круг зрошення, залишились незасіяними елітним посівним матеріалом. Відомо традиційна схема ведення ґрунтообробних, посівних та збиральних агрегатів човниковий спосіб ведення агрегату на полях, які зрошуються дощувальними машинами кругової дії. Схема ведення агрегатів пояснюється кресленням (Фіг. 2 а, б). На кресленні: а) - схема руху агрегатів при площі поля до 5 га; б) - схема руху агрегатів при площі поля понад 5 га. Недоліки човникового способу ведення агрегатів: - значні витрати часу та палива на технологічні розвороти при виконанні посівних робіт; - пересів ділянок поля, які не зрошуються, посухостійкими культурами; - збільшення часу посівної кампанії, що негативно впливає на подальший розвиток рослин. Використання глобальної системи позиціонування, а також використання географічних інформаційних систем привели до появи нової концепції - точного або керованого землеробства, на меті якого є документування виконаних робіт і оптимізація технологічних операцій. Одним з напрямків керованого землеробства є системи паралельного ведення агрегатів на базі технології супутникової системи позиціонування GPS, які в останній час стали широко застосовуватися в рільництві. В основу систем паралельного ведення положено єдиний принцип - на початку роботи трактором або машиною проводиться і фіксується в системі базова (первинна) колія. Відомо кільцевий спосіб ведення агрегатів, який базується на використанні систем паралельного ведення, найближчий аналог (Системи паралельного керування TRIMBLE, www.agriland.ua). Схема ведення посівного агрегату пояснюється кресленням (Фіг. 3). Спосіб виконують наступним чином - спочатку агрегатом проводиться перша базова дугоподібна колія, яка фіксується системою керованого землеробства. Після введення даних про ширину захвату агрегату, система відображає на моніторі оптимальний спосіб ведення агрегату та забезпечує проходження сусідніх колій паралельно первинній. 1 UA 92130 U 5 10 15 20 25 30 35 40 45 Недоліки аналогу: - наявність огріхів в вигляді "трикутників", які утворюються між поворотними смугами агрегатів біля дощувальної машини; - збільшується пересів в результаті зімкнення радіусної частини поворотної смуги агрегату; - використання більш дорогих приймачів GPS та обов'язкове використання платного супутникового сигналу; - необхідна більш висока кваліфікація оператора. Задача корисної моделі є розробка способу ведення ґрунтообробних, посівних та збиральних агрегатів по полях, які зрошуються дощувальними машинами кругової дії, який би забезпечив якісний обробіток ґрунту та посів культур по площі зрошуваного круга без втрат елітного посівного матеріалу біля кутів прямокутної ділянки, без пересівів та огріхів, використання менш дорогих приймачів GPS. Поставлена задача вирішується тим, що спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії, що включає ведення посівних та збиральних агрегатів по дугоподібній колії, яка фіксується системою керованого землеробства, якою обладнують енергетичний засіб агрегату, згідно з корисною моделлю, поле, яке обробляють посівні та збиральні агрегати, має форму круга, в центрі поля, який є також і центром обороту дощувальної машини, яка зрошує це поле, встановлюють додатково спеціальний прилад для отримання стабільного супутникового сигналу. Згідно з корисною моделлю, що для більш повного співпадання площі поля, яке обробляють посівні та збиральні агрегати, які рухаються по спіралі Архімеда, з площею зрошення, яке виконують дощувальні машини кругової дії, крок спіралі Архімеда дорівнює робочій ширині захвату посівних та збиральних агрегатів, при цьому площа зрошення може наближатися до оптимальної величини площі обробітку шляхом зміни робочої ширини захвату дощувальної машини кругової дії. Згідно з корисною моделлю, робота всіх агрегатів, які працюють на одному полі, що має форму круга, узгоджена між собою в часі та просторі: перед початком роботи на полі посівних та збиральних агрегатів, які рухаються по спіралі Архімеда, дощувальну машину кругової дії транспортують за межі цього поля. Приведені вище способи руху агрегатів свідчать про те, що доцільного та направленого на економію часу та ресурсів способу ведення агрегатів на полях, які зрошуються машинами кругової дії, на даний час не існує. Рух агрегатів по площі круга, який зрошується дощувальною машиною кругової дії, виконують по спіралі Архімеда. Спосіб ведення агрегатів по спіралі Архімеда пояснюється кресленням (Фіг. 4). Спіраль Архімеда - це плоска крива, траєкторія точки М, яка рівномірно рухається вздовж променя OV з початком в точці О, в той час, як сам промінь OV рівномірно обертається навколо точки О. Іншими словами, відстань ρ=ОМ пропорційна куту повороту φ променя OV. Поворот променя OV на один і той же кут відповідає одному й тому ж прирощенню ρ. Рівняння Архімедової спіралі в полярній системі координат має. такий вигляд: ρ=kφ, (1) де k – зміщення точки Μ по промінню при повороті на кут рівний одному радіану. Повороту променя на 2π відповідає зміщення α=2κπ, де, α - крок спіралі Архімеда. (2) Тоді рівняння спіралі Архімеда можна переписати так: 50 55 a . (3) 2 Промінь OV, проведений з точки О, перетинає спіраль Архімеда нескінченне число раз. Відстань між точками В та Μ, Μ та А дорівнюють кроку спіралі a, який залишається постійним. З цього випливає наступне - якщо ширину захвату агрегатів прийняти за крок спіралі, то по формулі (3) система керованого землеробства буде розраховувати та відображати на моніторі оптимальний спосіб ведення агрегатів та забезпечувати його проходження площею круга по спіралі Архімеда. При цьому відсутні втрати часу на повороти та переведення агрегатів в робоче та транспортне положення бо агрегати, рухаючись з постійною швидкістю, виконують технологічний процес обробітку ґрунту, сівби чи збирання врожаю за один прийом. Для здійснення цього способу обов'язковою умовою є транспортування дощувальної машини з поля. Транспортування не являється витратною або трудомісткою справою, так, як сучасні дощувальні машини можуть транспортувати самі себе за допомогою приводів, змонтованих на ведучій платформі, а що стосується більш старшого покоління машин, то вони 2 UA 92130 U 5 10 обладнані спеціальним причіпним пристроєм за допомогою якого транспортуються трактором не великої потужності. Агрегати повинні бути обладнані приладами системи паралельного ведення, а для більшої зручності та при використанні широкозахватних машин на рульову колонку агрегату встановлюють допоміжний підрулюючий пристрій. Для отримання стабільного супутникового сигналу та більшої точності ведення агрегату, як того вимагають агротехнічні вимоги по проведенню посівних робіт, в центрі обороту дощувальної машини О встановлюється спеціальний прилад, який одноразово на невеликий відсоток підвищить вартість системи паралельного ведення, але збільшить продуктивність агрегату в цілому. Проводять порівняльну оцінку як аналітичним, так і практичним методами. Було встановлено, що використання способу ведення агрегатів по спіралі Архімеда має значну перевагу як над використанням традиційних способів ведення, так і над кільцевим. Результати оцінки представлено в таблиці. Таблиця Загальна площа поля, га Площа під посів, га Довжина робочого ходу, км Довжина холостих проїздів та поворотних смуг, км Час на основну роботу, год. Час на повороти, год. Час на переведення в робоче та транспортне положення Кільцевий спосіб ведення агрегату з GPS 1 Показники Човниковий спосіб ведення агрегату 2 Спіральний спосіб ведення агрегату з GPS 3 25 19,6 16,4 15,8 14,3 2,2 1,1 2,4 1,86 1,34 0,63 0,3 0,47 0,22 15 20 25 30 35 Аналіз таблиці показує, що впровадження запропонованого способу дозволяє зменшити довжину робочого ходу в порівнянні з аналогом, Крім того відсутні холості проїзди та поворотні смуги. В результаті цього зменшився час виконання основної роботи (1,34 проти 1,86 та 2,4 год.), а час на переведення агрегату в робоче та транспортне положення взагалі відсутній. Технічний результат: - ведення агрегатів по спіралі Архімеда в порівнянні з човниковим та кільцевим способами ведення зменшує довжину робочого ходу; - холості проїзди та поворотні смуги, які в кінцевому результаті збільшують вартість сільськогосподарської продукції, при русі агрегатів згідно з корисною моделлю взагалі відсутні; - при відповідному регулюванні ширини захвату агрегатів, круг обробітку ґрунту, посіву та збирання співпадає з кругом зрошення, що дозволяє економити елітний посівний матеріал, зменшити витрати коштів на основний обробіток ґрунту та посів, збільшити врожайність просапних культур, зменшити навантаження на ґрунт; - використання менш дорогих приймачів GPS та безкоштовного супутникового сигналу в системі паралельного ведення агрегатів дозволяє зменшити втрати коштів в порівнянні з кільцевим способом ведення на вирощування продукції. Запропонований спосіб дозволяє по новітньому підійти до створення інноваційних моделей руху агрегатів з метою підвищення їх продуктивності, зменшення витрат часу та коштів на проведення підготовки ґрунту, посіву культур та збирання врожаю, запобіганню втрат елітного матеріалу при пересівах. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 1. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії, що 3 UA 92130 U 5 10 15 20 включає ведення посівних та збиральних агрегатів по дугоподібній колії, яка фіксується системою керованого землеробства, якою обладнують енергетичний засіб агрегату, який відрізняється тим, що поле, яке обробляють посівні та збиральні агрегати, має форму круга, в центрі поля, який є також і центром обороту дощувальної машини, яка зрошує це поле, встановлюють додатково спеціальний прилад для отримання стабільного супутникового сигналу. 2. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії за п. 1, який відрізняється тим, що для більш повного співпадання площі поля, яке обробляють посівні та збиральні агрегати, які рухаються по спіралі Архімеда, з площею зрошення, яке виконують дощувальні машини кругової дії, крок спіралі Архімеда дорівнює робочій ширині захвату посівних та збиральних агрегатів, при цьому площа зрошення може наближатися до оптимальної величини площі обробітку шляхом зміни робочої ширини захвату дощувальної машини кругової дії. 3. Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства на полях, які зрошуються дощувальними машинами кругової дії за п. 1, який відрізняється тим, що робота всіх агрегатів, які працюють на одному полі, що має форму круга, узгоджена між собою в часі та просторі: перед початком роботи на полі посівних та збиральних агрегатів, які рухаються по спіралі Архімеда, дощувальну машину кругової дії транспортують за межі цього поля. 4 UA 92130 U 5 UA 92130 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01G 25/09, A01B 69/04, G05D 1/02
Мітки: кругової, збиральних, землеробства, дощувальними, дії, полях, машинами, керованого, посівних, засобами, ведення, спосіб, агрегатів, обладнаних, зрошуються, технічними
Код посилання
<a href="https://ua.patents.su/8-92130-sposib-vedennya-posivnikh-ta-zbiralnikh-agregativ-obladnanikh-tekhnichnimi-zasobami-kerovanogo-zemlerobstva-na-polyakh-yaki-zroshuyutsya-doshhuvalnimi-mashinami-krugovo-di.html" target="_blank" rel="follow" title="База патентів України">Спосіб ведення посівних та збиральних агрегатів, обладнаних технічними засобами керованого землеробства, на полях, які зрошуються дощувальними машинами кругової дії</a>
Спосіб зменшення ущільнення ґрунту та зменшення одностороннього зносу робочих органів агрегатів, які рухаються по спіралі архімеда на полях, які зрошуються дощувальними машинами кругової дії
Номер патенту: 78177
Опубліковано: 11.03.2013
Автори: Кучеренко Володимир Григорович, Громитко Віталій Васильович, Митрофанов Олександр Петрович
МПК: A01B 79/00
Мітки: дощувальними, агрегатів, полях, спосіб, робочих, ґрунту, машинами, зрошуються, рухаються, дії, органів, кругової, зменшення, одностороннього, зносу, спіралі, архімеда, ущільнення
Формула / Реферат:
1. Спосіб зменшення ущільнення ґрунту та зменшення одностороннього зносу робочих органів агрегатів, які рухаються по спіралі Архімеда на полях, які зрошуються дощувальними машинами кругової дії, що включає ведення агрегатів по дугоподібній колії, яка фіксується системою керованого землеробства, якою обладнують енергетичний засіб агрегату, який відрізняється тим, що агрегати рухаються по подвійній спіралі Архімеда, при цьому, для зменшення...
Спосіб зменшення інтенсивності штучного дощу та підвищення швидкості зрошення дощувальними машинами кругової дії
Номер патенту: 89048
Опубліковано: 10.04.2014
Автори: Мігальов Андрій Олександрович, Митрофанов Олександр Петрович, Кучеренко Володимир Григорович, Сидоренко Володимир Володимирович
МПК: A01G 25/00
Мітки: дії, машинами, інтенсивності, штучного, дощу, зменшення, швидкості, спосіб, зрошення, підвищення, дощувальними, кругової
Формула / Реферат:
1. Спосіб зменшення інтенсивності штучного дощу та підвищення швидкості зрошення дощувальними машинами кругової дії, що включає використання низьконапірної дощувальної машини кругової дії, обладнаної низьконапірними дощувальними насадками ротаційної дії i-Wob "Senninger" з регулятором тиску перед кожною насадкою, який відрізняється тим, що зрошення виконують двома крилами, які мають однакову довжину, крила мають одну вісь обертання,...
Спосіб рівномірного розподілу штучного дощу та зменшення енергоспоживання при зрошуванні низьконапірними дощувальними машинами кругової дії
Номер патенту: 91738
Опубліковано: 10.07.2014
Автор: Сидоренко Володимир Володимирович
МПК: A01G 25/00
Мітки: спосіб, зменшення, кругової, дощувальними, зрошуванні, низьконапірними, енергоспоживання, дії, штучного, машинами, дощу, рівномірного, розподілу
Формула / Реферат:
1. Спосіб рівномірного розподілу штучного дощу та зменшення енергоспоживання при зрошуванні низьконапірними дощувальними машинами кругової дії, що включає використання низьконапірної дощувальної машини кругової дії, обладнаної низьконапірними дощувальними насадками ротаційної дії i-Wob "Senninger" з регулятором тиску перед кожною насадкою, діаметри сопел яких збільшують в напрямку до кінцевих частин дощувальної машини та розміщують...
Спосіб визначення об’ємів та об’ємних витрат води, поданої дощувальними машинами та установками

Номер патенту: 41402
Опубліковано: 25.05.2009
Автор: Попов Віктор Миколайович
МПК: G01F 9/00
Мітки: установками, об'ємних, дощувальними, об'ємів, машинами, витрат, спосіб, визначення, поданої, води
Формула / Реферат:
Спосіб визначення об'ємів та об'ємних витрат води, поданої дощувальними машинами та установками, за яким шукані характеристики обчисляють з урахуванням часу їх роботи, який відрізняється тим, що попередньо експериментальним шляхом визначають залежність об'ємної витрати qv (м3/год.) води від напору Н (м) води для конкретного дощувального агрегату в реальних умовах; на графіку цієї залежності визначають градуювальні...
Спосіб збагачення грунту на біологічний азот за умов ведення біологічного землеробства
Номер патенту: 50022
Опубліковано: 25.05.2010
Автор: Маклюк Олена Іванівна
МПК: C12P 1/00, C05F 11/00
Мітки: азот, грунту, збагачення, біологічного, ведення, біологічний, спосіб, умов, землеробства
Формула / Реферат:
Спосіб збагачення ґрунту на біологічний азот за умов ведення біологічного землеробства, який включає використання біопрепарату для підвищення біологічного азоту, який відрізняється тим, що для передпосівної бактеризації насіння як біопрепарат використовують біоагент Bacillus sp В 333, створений методом аналітичної селекції за принципом відбору природних ізолятів, які мають високу азотфіксувальну активність.
Попередній патент: Банка пакувальна для фармацевтичних препаратів
Наступний патент: Спосіб рафінації жирної коріандрової олії
Випадковий патент: Кодовий диференціальний пристрій замка