Спосіб сівби насіння
Номер патенту: 93947
Опубліковано: 27.10.2014
Автори: Дубовик Ігор Ігорович, Лобов Вячеслав Йосипович, Савосько Василь Миколайович

Формула / Реферат
1. Спосіб сівби насіння, що містить створення в ґрунті борозен, подачу в них через сошник насіння і ущільнення борозен, при цьому додатково здійснюють підготовку насіння, поєднуючи її з подачею насіння у борозни шляхом змішування в сошнику потоку насіння з потоком водяного розчину добрив і стимуляторів росту, а ущільнення борозен поєднують з подачею в них спільного потоку насіння і водяного розчину добрив і стимуляторів росту на глибину закладення шляхом інтенсивного зволоження ґрунту водою, який відрізняється тим, що додатково в робочій зоні сівалки у атмосферному повітрі вимірюють фізико-хімічні властивості сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщенні посівного агрегату, обчислюють гігроскопічність цього пилу, по якому визначають вологість ґрунту, і в залежності від її рівня автоматично керують виконавчими механізмами сошників сівалки, наприклад гідроциліндрами, які регулюють потрібні глибини борозен для закладання насіння, а у посівну борозну вводять порцію води для приведення ґрунту до стану оптимальної вологості, що забезпечує необхідну польову схожість насіння в тому випадку, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі висіву, менше нормованої, та визначають коефіцієнт спектральної яскравості сільськогосподарського пилу (пилу ґрунтової дефляції), по якому розраховують гумусові речовини ґрунту, та в залежності від його рівня керують виконавчими механізмами, які регулюють подачу у борозни органічних речовин, які необхідні рослинам для забезпечення потрібної родючості.
2. Спосіб сівби насіння за п. 1, який відрізняється тим, що перед визначенням вологості та щільності ґрунту висіву, до висіву та в процесі висіву насіння у борозни, виміряють дійсні значення глибин посівних борозен та, в залежності від щільності та кількості вологи сільськогосподарського пилу (пилу ґрунтової дефляції) при переміщені посівного агрегату, визначають величину зусилля ущільнення посівної борозни колесами, що коткують, і в залежності від цього автоматично керують виконавчими механізмами ущільнення борозен, забезпечуючи нормовані значення зусиль ущільнення посівних борозен колесами та здійснюють шлейфування ґрунту над рівчаком.
Текст
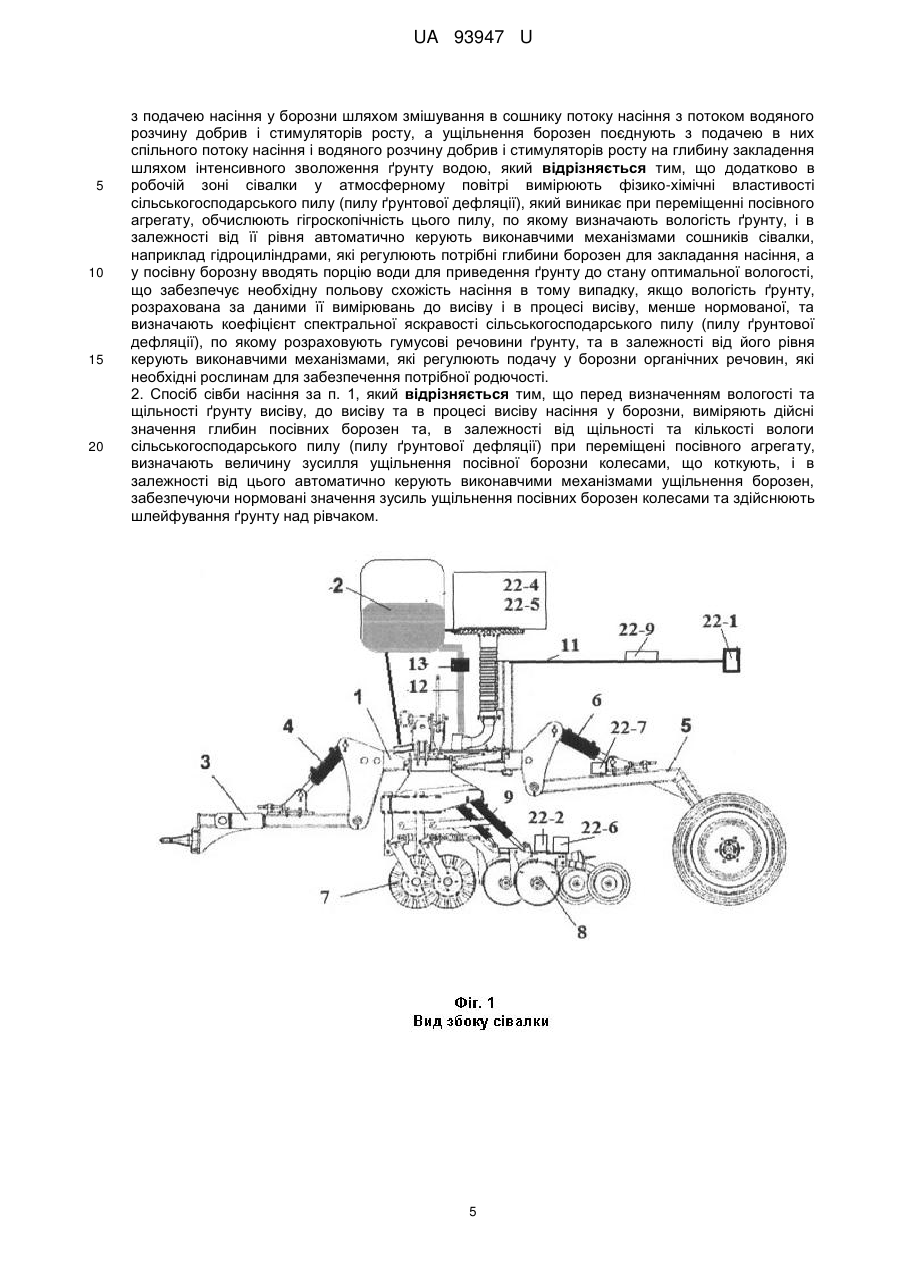
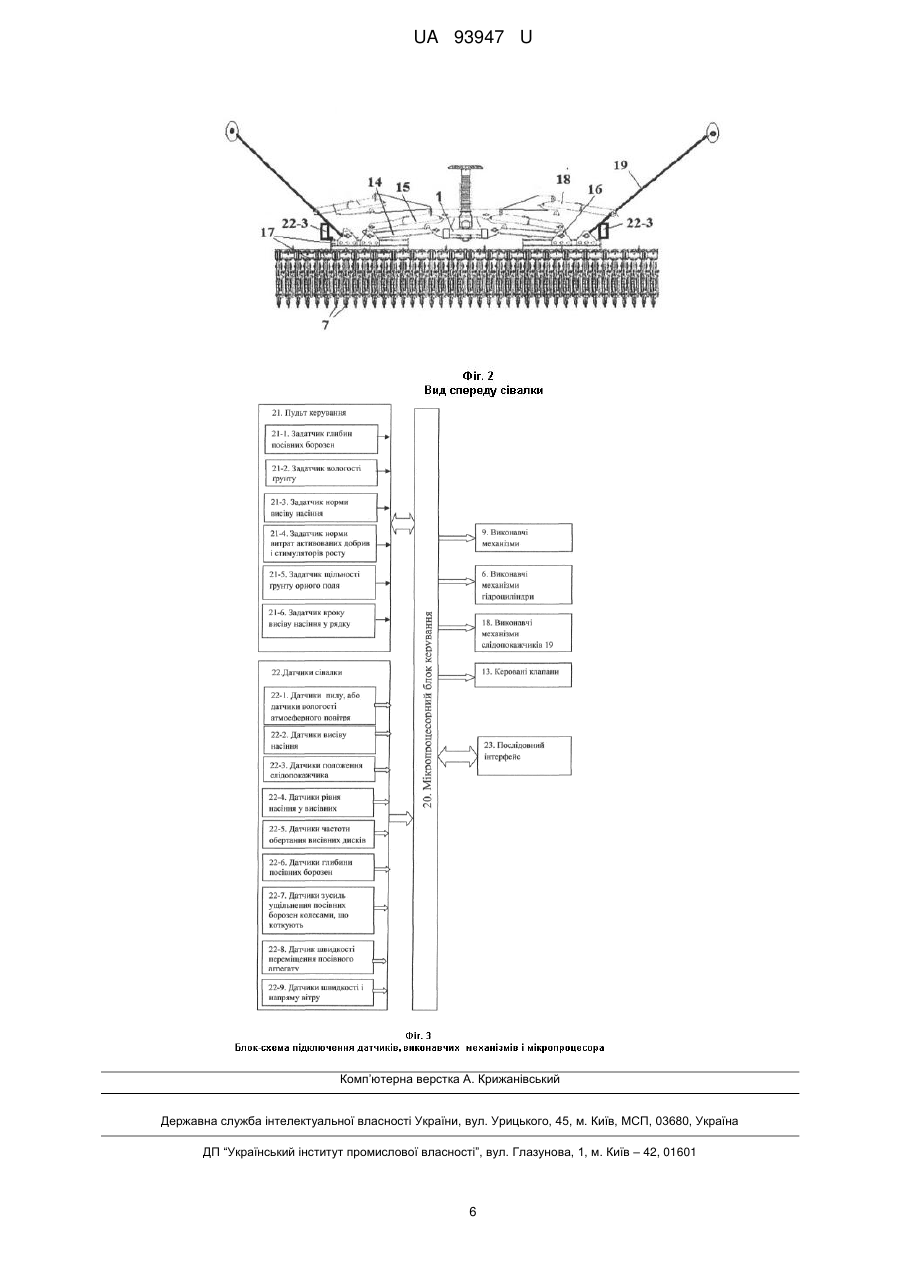
Реферат: Спосіб сівби насіння, що містить створення в ґрунті борозен, подачу в них через сошник насіння і ущільнення борозен, при цьому додатково здійснюють підготовку насіння, поєднуючи її з подачею насіння у борозни шляхом змішування в сошнику потоку насіння з потоком водяного розчину добрив і стимуляторів росту, а ущільнення борозен поєднують з подачею в них спільного потоку насіння і водяного розчину добрив і стимуляторів росту на глибину закладення шляхом інтенсивного зволоження ґрунту водою, причому додатково в робочій зоні сівалки у атмосферному повітрі вимірюють фізико-хімічні властивості сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщені посівного агрегату, обчислюють гігроскопічність цього пилу, по якому визначають вологість ґрунту, і в залежності від її рівня автоматично керують виконавчими механізмами сошників сівалки, наприклад гідроциліндрами, які регулюють потрібні глибини борозен для закладання насіння, а у посівну борозну вводять порцію води для приведення ґрунту до стану оптимальної вологості, що забезпечує необхідну польову схожість насіння в тому випадку, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі висіву, менше нормованої, та визначають коефіцієнт спектральної яскравості сільськогосподарського пилу (пилу ґрунтової дефляції), по якому розраховують гумусові речовини ґрунту, та в залежності від його рівня керують виконавчими механізмами, які регулюють подачу у борозни органічних речовин, які необхідні рослинам для забезпечення потрібної родючості. UA 93947 U (12) UA 93947 U UA 93947 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель має відношення до сільськогосподарського виробництва, зокрема до сівби насіння сільськогосподарських культур, наприклад цукрового буряка, кукурудзи, соняшнику та інших, а також до способів обробки ґрунту в поєднанні з іншими сільгоспроботами, наприклад внесенням насіння і добрив у ґрунт, і призначена для удосконалення процесу сівби польових культур. До відомих способів посіву просапних культур можна віднести спосіб висіву насіння, що включає формування посівної борозни, подачу в неї струменя рідини, посів насіння з засипанням ґрунтом і подальшим нерегульованим ущільненням і подрібненням ґрунту над посівним рівчаком [АС СССР № 169918, МПК А01С 7/04]. Недоліком відомих способів є те, що вони спрямовані на підвищення точності висіву і не забезпечують максимальну польову схожість насіння з урахуванням неоднорідних властивостей ґрунту, наприклад його вологості на довжині гону, або мінімальних витрат рідини для забезпечення необхідної вологості ґрунту. При нестачі опадів і засушливій погоді, відсутності контролю за вологістю орного поля та посівної борозни ґрунту часто перевищується науково обґрунтована глибина загортання насіння, що вимагає перенесення строків сівби, або висівання насіння на ризик в сухий ґрунт. Все це не гарантує сходів і урожаю вирощуваних культур. До недоліків відомих способів сівби сільськогосподарських культур належить також внесення поживних речовин під запрограмований врожай сільськогосподарських культур без врахування поживних речовин на окремих ділянках поля. Найбільш близьким аналогом є спосіб сівби насіння [патент України № 15126, опубл. 15.06.2006 р., М Кл А01В79/02], що містить створення в ґрунті борозен, подачу в них через сошник насіння і ущільнення борозен, при цьому додатково здійснюють підготовку насіння, поєднуючи її з подачею насіння у борозни шляхом змішування в сошнику потоку насіння з потоком водяного розчину добрив і стимуляторів росту, а ущільнення борозен поєднують з подачею в них спільного потоку насіння і водяного розчину добрив і стимуляторів росту на глибину закладення шляхом інтенсивного зволоження ґрунту водою. Недоліком даного способу є те, що його дія спрямована на підвищення точності висіву, при цьому не забезпечується максимальна польова схожість насіння з урахуванням неоднорідних властивостей параметрів ґрунту на довжині гону, так як використання датчика вологості ґрунту, який прикріплений до торця сошника під насіннєпровід, і пов'язаного з використанням контакту датчика з ґрунтом, приводить до механічного зносу, брязкоту контактів, помилкових спрацьовувань і виникнення відмов. Визначення вологості по омічному опору ґрунту приводить до великої похибки, особливо при швидкому переміщенню сівалки і тому дає недійсне визначення вологості ґрунту. За допомогою контактного датчика вологості практично неможливо здійснити безперервний контроль. Ці недоліки знижують польову схожість насіння і рівномірність розміщення насіння в борозні, а також призводять до збільшення витрат рідин, що вносяться в борозну. В основу корисної моделі поставлена задача удосконалення способу сівби насіння за рахунок використання технології по безконтактному визначенню вологості ґрунту, за допомогою якої можливо визначити реальний стан посівного поля та борозни і яка забезпечує меншу похибку та більшу точність вимірювання параметрів ніж у відомих контактних методів визначення вологості. Це надасть необхідну інформацію для прийняття рішень і виконання технологічних операцій для забезпечення найкращих умов для проростання, підвищення польової схожості насіння, зниження витрат рідини і підвищення рівномірності розміщення насіння в борозні та в кожному з сусідніх (суміжних) рядках з забезпеченням найкращого розвитку рослин. Поставлена задача вирішується за рахунок того, що спосіб включає створення в ґрунті борозен, подачу в них через сошник насіння і ущільнення борозен, при цьому додатково здійснюють підготовку насіння, поєднуючи її з подачею насіння у борозни шляхом змішування в сошнику потоку насіння з потоком водяного розчину добрив і стимуляторів росту, а ущільнення борозен поєднують з подачею в них спільного потоку насіння і водяного розчину добрив і стимуляторів росту на глибину закладення шляхом інтенсивного зволоження ґрунту водою. Згідно з корисною моделлю, додатково в робочій зоні сівалки у атмосферному повітрі вимірюють фізико-хімічні властивості сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщенні посівного агрегату, обчислюють гігроскопічність цього пилу, по якому визначають вологість ґрунту, і в залежності від її рівня автоматично керують виконавчими механізмами сошників сівалки, наприклад гідроциліндрами, які регулюють потрібні глибини борозен для закладання насіння. У посівну борозну вводять порцію води для приведення ґрунту до стану оптимальної вологості, що забезпечує необхідну польову схожість насіння в тому випадку, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі 1 UA 93947 U 5 10 15 20 25 30 35 40 45 50 55 60 висіву, менше нормованої. При переміщенні посівного агрегату визначають коефіцієнт спектральної яскравості сільськогосподарського пилу, по якому розраховують гумусові речовини ґрунту, та в залежності від його рівня керують виконуючими механізмами, які регулюють подачу у борозни органічних речовин, які необхідні рослинам для забезпечення потрібної родючості. Для забезпечення більш точного контролю параметрів ґрунту та висіву насіння, при переміщенні посівного агрегату, рекомендується перед визначенням вологості та щільності ґрунту висіву, до висіву та в процесі висіву насіння у борозни, вимірювати дійсні значення глибин посівних борозен. В залежності від щільності та кількості вологи сільськогосподарського пилу (пилу ґрунтової дефляції) при переміщені посівного агрегату, визначають величину зусилля ущільнення посівної борозни колесами, що коткують, і в залежності від цього автоматично керують виконавчими механізмами ущільнення борозен, забезпечуючи нормовані значення зусиль ущільнення посівних борозен колесами та здійснюють шлейфування ґрунту над рівчаком. Корисна модель пояснюється кресленнями: на фіг. 1 зображено вид збоку сівалки, на фіг. 2 вид спереду сівалки, на фіг. 3 - блок-схема підключення датчиків, виконавчих механізмів і мікропроцесора. Спосіб реалізується наступним чином. До складу сівалки включають (фіг. 1 і фіг. 2) висіваючий блок, який складається з рами 1, бункерної ємності 2, підвішених на опорах: спереду зчіпний пристрій 3, з'єднаний за допомогою петлі з трактором (не показано), що регулюється гідроциліндрами 4, позаду колісна ходова система 5, що регулюється гідроциліндрами 6. В свою чергу встановлюється два ряди хвилястих дисків 7 та два ряди сошників 8, які керуються виконавчими механізмами 9, по сигналах датчиків 22, встановлених на штанзі 11. В трубопроводі 12 бункерної ємності 2 для води та розчину активованої рідини встановлюються керовані клапани 13. З двох сторін рами 1 розташовані крила 14, що споряджені гідроциліндрами 15, які в робочому положенні утворюють жорстку конструкцію. На крилах 14 встановлюються шарніри 16 до яких підвішуються дві піврами 17 на яких, в свою чергу, встановлюються два ряди хвилястих дисків 7 та два ряди сошників 8. Стан виконавчих механізмів 18 та слідопокажчиків 19 контролюють датчики22-3. Управління сівалкою виконує мікропроцесорний блок керування 20 (фіг. 3), який входами з'єднується із пультом керування 21, датчиками 22, а виходами - виконавчими механізмами 9 сошників 8, гідроциліндрів 6, слідопокажчиків 19 і керованими клапанами 13. Пульт керування 21 має набір задавачів для встановлення по даному способу сівби насіння нормованих значень: глибин посівних борозен - задатчик 21-1, вологості ґрунту - задатчик 21-2, норми висіву насіння - задатчик 21-3, норми витрат активованих добрив і стимуляторів росту задатчик 21-4, щільності ґрунту орного поля - задатчик 21-5, кроку висіву насіння у рядку задатчик 21-6. Датчики 22 по даному способу сівби насіння виконують функції контролю за станом: пилу атмосферного повітря - датчики 22-1, висіву насіння - датчики 22-2, положення слідопокажчика датчики 22-3, рівня насіння у висівних апаратах - датчики 22-4, частоти обертання висівних дисків - датчики 22-5, глибини посівних борозен - датчики 22-6, зусиль ущільнення посівних борозен колесами, що коткують - датчики 22-7, швидкості переміщення посівного агрегату датчики 22-8 (у кабіні трактора), швидкості і направлення вітру - датчики 22-9. Перед початком роботи, трактор із сівалкою з'єднують за допомогою карданного вала автозчепленням 3 (трактор на кресленні не показано), а також з'єднують гідроциліндри 4, 6, 9 і 15 з гідравлічною системою трактора. Перевіряють розміщення висівних агрегатів по ширині захоплення сівалки, установлюють через пульт керування 21 необхідний крок висіву насіння у рядку - задатчиком 21-6, шляхом постановки необхідних насінних шестерень у приводних консолях, а також після визначення вильоту (відстань від диска слідопокажчика 19 до крайнього висівного ряду) слідопокажчика 19 встановлюють у робоче положення. Для цього із пульта керування 21, розташованого у кабіні трактора, здійснюють опускання слідопокажчиків 19 за допомогою гідроциліндрів 18. Стан слідопокажчиків 19 контролюється датчиками положення 223. Після завершення сівби слідопокажчики 19 піднімаються гідроциліндром 18 у вихідне положення за допомогою зміни довжини тросів. Перед сівбою із пульта керування 21 для сівалки попередньо задають потрібні вид насіння і норми його висіву, допустимі значення вологості та щільності ґрунту орного поля і посівних борозен, нормовану глибину борозни та норми витрат активованих добрив і стимуляторів росту. Всі вказані задатчики пульта керування 21 входами підключаються до мікропроцесорного блока керування 20, який попередньо обчислює і встановлює необхідні відстані між насінинами в рядку за рахунок початкових заданих трактористом параметрів і зміни частоти обертання висівного диска секції сівалки, що контролює датчик 22-5, встановленого в насіннєвий ящик. 2 UA 93947 U 5 10 15 20 25 30 35 40 45 50 55 60 Одночасно з цим автоматично визначається і зміщення в сусідніх (суміжних) рядках на піввідстані між місцями розташування насінин. Крім того, шляхом переміщення висівних секцій одна до одної встановлюють відповідну ширину між сусідніми (суміжними) рядками (ширина міжрядь). Сошниками 8 нарізують пробну посівну борозну, по якій визначають коректність налаштувань датчиків 22 і перевіряють відповідність поверхні ґрунтів орного поля і борозни в зоні висіву насіння за допомогою еталонних стандартних пристроїв, наприклад вимірювачем вологості типу DT-616CT. При необхідності вносяться відповідні коригування, враховуючи, що датчики 22 налаштовуються автоматично. Коректують похибки вимірювань після тестування і встановлюють на пульті керування 21 значення оптимальної вологості ґрунту, наприклад 19 %. Засипають у насіннєвий ящик насіння, яке надходить у висівний апарат, в ємність 2 заливають рідину, наприклад активовані добрива й стимулятори росту, а у іншу ємність заливають воду. При пробному проїзді сівалки тракторист перевіряє роботу датчиків обертання диска 22-5 і висіву насінин 22-2. При роботі сівалки за допомогою датчиків 22, мікропроцесорного блока керування 20 та додаткових нових елементів здійснюються наступні операції: - грудковідведення пристроєм перед сошниками 8; - нарізання сошниками 8 посівної борозни, з одночасним вимірюванням вологості ґрунту посівного поля за допомогою датчиків 22-1, для чого додатково вимірюють в робочій зоні сівалки у атмосферному повітрі концентрацію сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщенні посівного агрегату та вимірюють дійсні величини глибин борозен за допомогою датчиків 22-6 блока 22; - мікропроцесорний блок керування 20 обчислює гігроскопічність атмосферного повітря і в залежності від його рівня автоматично керує виконуючими механізмами сошників 8 сівалки, наприклад гідроциліндрами, які регулюють потрібні глибини борозен для закладання насіння, відповідно заданих норм з пульта 21 з урахуванням швидкості переміщення посівного агрегата та швидкості й направлення вітру; - у посівні борозни вводять порції води для приведення ґрунту до стану вологості, що забезпечує максимальну польову схожість насіння в тому випадку, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі висіву, менше нормованої; - при переміщенні посівного агрегату визначають коефіцієнт спектральної яскравості сільськогосподарського пилу (пилу ґрунтової дефляції), який залежить від вологості та гранулометричного складу поверхні ґрунту; - мікропроцесорний блок керування 20 по коефіцієнту спектральної яскравості сільськогосподарського пилу визначає відсоток гумусових речовини у ґрунті та в залежності від його рівня керує клапанами 13, які регулюють подачу у борозни органічних речовин, відповідно заданої норми задатчиком 21-4; - мікропроцесорний блок керування 20 розраховує щільності ґрунту у посівних борознах, за допомогою датчика 22-7 зусиль ущільнення посівних борозен колесами, що коткують; - розпушування ґрунту посівних борозен, якщо щільність ґрунту відрізняється від заданої задатчиком 21-5; - висів у посівну борозну насінин з одночасною реєстрацією відповідними датчиками висіву насінин, вологості і щільності в зоні висіву насінин при наявності їх у висівному апараті, що контролюється за допомогою датчиків 22; - загортання ґрунтом насінин методом обвалення ґрунту в посівних борознах ободом колеса і ущільнення їх у борознах із заданим зусиллями, при цьому враховується значення фактичної вологості і щільності ґрунту у кожній посівній борозні; - прикочування поверхні ґрунту з ущільненням посівних борозен по осі рядка і в захисних зонах котками із зусиллям, що визначається дійсним станом орного поля, з подальшим шлейфуванням і мульчуванням ґрунту шлейфом. Для визначення вологості ґрунту на поверхні орного поля, де нарізуються борозни, в робочій зоні сівалки у атмосферному повітрі вимірюють концентрацію сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщенні посівного агрегату. Це може здійснюватися за допомогою, наприклад, пристрою вимірювання пилу DUSTHUNTER C200 компанії SICK AG, який підтримує два вимірювальних принципи: за коефіцієнтом пропускання і розсіяного світлового випромінювання, вимірюють концентрацію пилу в атмосферному повітрі. SICK DUSTHUNTER C200 стабільно працює навіть при дуже низькій або високій концентрації пилу, має функцію автоматичної перевірки нульової точки і точки відліку, а також підтримує самоустановку. Найбільш суттєвими факторами, що визначають вміст пилу в атмосферному повітрі у робочій зоні агрегату, є вологість і структура ґрунту, а також розташування місця 3 UA 93947 U 5 10 15 20 25 30 35 40 45 50 55 установки датчиків 20-1 щодо впливу на нього пилоутворюючих факторів, напрямок і швидкість руху агрегату. Мікропроцесорний блок керування 20 обчислює гігроскопічність атмосферного повітря і в залежності від його рівня автоматично керує виконавчими механізмами сошників 8 сівалки, наприклад гідроциліндрами 6, які регулюють потрібні глибини борозен для закладення насіння, відповідно заданих норм з пульта 21. В іншому випадку для виміру вологості ґрунту через атмосферне повітря у сільськогосподарському пилу у робочій зоні при переміщенні посівного агрегату може буде використаний інфрачервоний вологомір, що містить джерело ІЧ-випромінювання, оптично зв'язаний з фотоприймачем через оптичну систему, модулятор-монохроматор з інтерференційними фільтрами і мікропроцесор, з'єднаний з фотоприймачем, а оптична система виконана з передавальних та приймального світловодів, при цьому вхідні вікна передавальних світловодів розташовані після модулятора-монохроматора по колу переміщення інтерференційних фільтрів на відстані один від одного, дорівнює діаметру інтерференційного фільтра, а вихідні вікна розміщені рівномірно по ширині полотна паперу навпроти вхідних вікон приймального світловода, на виході якого розташований фотоприймач, наприклад використовується безконтактний (інфрачервоний) термометр ScanTemp RH 896 з лазерним прицілюванням і гігрометричним датчиком (Dostmann electronic GmbH, Німеччина) з вбудованим USB-портом. Датчики 22-10 дозволяють не тільки відображати місця з ризиком утворення вологи, але і безпосередньо розраховувати вологість на поверхні ґрунту поля з відображенням значень на дисплеї мікропроцесорного блока керування 20 і використовувати ці параметри для керування виконавчими механізмами сошників 8 - гідроциліндрами сівалки, які регулюють потрібні глибини борозен для закладання насіння. Обчислена мікропроцесорним блоком керування 20 гігроскопічність ґрунту визначає його вологість, яка зрівнюється з нормованою, що забезпечує максимальну польову схожість насіння та, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі висіву, менше нормованої то у посівну борозну вводять порцію води з розчином активованої рідини для приведення ґрунту до стану вологості. При русі сівалки по полю маса висіваючого блока рівномірно розподіляється через шарніри 16, напіврами 17 на хвилясті диски 7 та сошники 8 по всій ширині висіваючого модуля, забезпечуючи рівномірне довантаження хвилястих дисків 7 та сошників 8 та краще проникнення їх в ґрунт при несприятливих для посіву умовах, наприклад на ділянках з нерівномірною поверхнею поля, а також рівномірне покриття ґрунту посівним матеріалом або добривами, шляхом скорочення довжини гідроциліндрів 4, та передачі частково маси бункерної ємності або трактора через петлю, зчіпний пристрій 2, раму 1, крила 14, шарніри 16, напіврами 17 до хвилястих дисків 7 та сошників 8. Перед визначенням вологості та щільності ґрунту висіву, до висіву та в процесі висіву насіння у борозни, виміряють дійсні значення глибини посівної борозни та зусилля ущільнення посівної борозни колесами. Для цього використовуються відповідні датчики. Так для визначення глибини борозен може бути використаний ультразвуковий датчик наближення "ДГВ-200", який видає в цифровому вигляді виміряне значення в сантиметрах і не вимагає калібрування і тарування та передає виміряне значення по інтерфейсу RS-485. При русі посівного комплексу ультразвуковий датчик багато разів в секунду вимірює відстань до землі, після математичної обробки отримуючи усереднене стабільне значення в сантиметрах. Якщо на даному агрегаті при 61 см сошники тільки торкаються ґрунту, то переважна при роботі відстань до землі в 56 см відповідає глибині висіву 5 см. Програмне забезпечення мікропроцесорного блока керування 20 на підставі треків сівалки по полю і показань датчика глибини борозен будує карту глибин висіву. По ній керівник може одним поглядом оцінити рівномірність глибини висіву на поле і виявити ділянки з порушенням технології. Запропонований спосіб сівби дозволить підвищити врожайність висіяного насіння за рахунок більш якісного припосівного розподілу насіння і добрив у ґрунті та дозволяє виконувати сівбу насіння при нестачі продуктивної вологи на глибині загортання насіння, в агротехнічні строки, у вологий ґрунт на глибину, що забезпечить найкращі умови для проростання насіння, та гарантує оптимальну густоту сходів. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 1. Спосіб сівби насіння, що містить створення в ґрунті борозен, подачу в них через сошник насіння і ущільнення борозен, при цьому додатково здійснюють підготовку насіння, поєднуючи її 4 UA 93947 U 5 10 15 20 з подачею насіння у борозни шляхом змішування в сошнику потоку насіння з потоком водяного розчину добрив і стимуляторів росту, а ущільнення борозен поєднують з подачею в них спільного потоку насіння і водяного розчину добрив і стимуляторів росту на глибину закладення шляхом інтенсивного зволоження ґрунту водою, який відрізняється тим, що додатково в робочій зоні сівалки у атмосферному повітрі вимірюють фізико-хімічні властивості сільськогосподарського пилу (пилу ґрунтової дефляції), який виникає при переміщенні посівного агрегату, обчислюють гігроскопічність цього пилу, по якому визначають вологість ґрунту, і в залежності від її рівня автоматично керують виконавчими механізмами сошників сівалки, наприклад гідроциліндрами, які регулюють потрібні глибини борозен для закладання насіння, а у посівну борозну вводять порцію води для приведення ґрунту до стану оптимальної вологості, що забезпечує необхідну польову схожість насіння в тому випадку, якщо вологість ґрунту, розрахована за даними її вимірювань до висіву і в процесі висіву, менше нормованої, та визначають коефіцієнт спектральної яскравості сільськогосподарського пилу (пилу ґрунтової дефляції), по якому розраховують гумусові речовини ґрунту, та в залежності від його рівня керують виконавчими механізмами, які регулюють подачу у борозни органічних речовин, які необхідні рослинам для забезпечення потрібної родючості. 2. Спосіб сівби насіння за п. 1, який відрізняється тим, що перед визначенням вологості та щільності ґрунту висіву, до висіву та в процесі висіву насіння у борозни, виміряють дійсні значення глибин посівних борозен та, в залежності від щільності та кількості вологи сільськогосподарського пилу (пилу ґрунтової дефляції) при переміщені посівного агрегату, визначають величину зусилля ущільнення посівної борозни колесами, що коткують, і в залежності від цього автоматично керують виконавчими механізмами ущільнення борозен, забезпечуючи нормовані значення зусиль ущільнення посівних борозен колесами та здійснюють шлейфування ґрунту над рівчаком. 5 UA 93947 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01C 7/00
Код посилання
<a href="https://ua.patents.su/8-93947-sposib-sivbi-nasinnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб сівби насіння</a>
Спосіб обробки грунту для борозневої сівби насіння
Номер патенту: 28357
Опубліковано: 10.12.2007
Автор: Курило Василь Леонідович
МПК: A01B 79/00
Мітки: сівби, грунту, борозневої, насіння, обробки, спосіб
Формула / Реферат:
Спосіб обробки ґрунту для борозневої сівби насіння, що включає: розпушування поверхневого шару ґрунту до дрібногрудкуватого стану, знищення проростків бур'янів, загортання ґрунтових гербіцидів (при необхідності їх внесення), утворення борозен у поверхневому шарі ґрунту для сівби насіння у вологий ґрунт, створення вирівняного оптимально ущільненого насіннєвого ложа, який відрізняється тим, що з метою створення необхідних умов для проростання...
Спосіб сівби та вирощування насіння бавовнику
Номер патенту: 45216
Опубліковано: 26.10.2009
Автори: Бекіров Ленур Расімович, ЯКУБОВ Данір, Бекіров Расім Нафеєвич, Амєтов Даніал Юсуфович
МПК: A01C 5/00
Мітки: спосіб, бавовнику, сівби, насіння, вирощування
Формула / Реферат:
Спосіб сівби та вирощування насіння бавовнику, що включає підготовку ґрунту, розмічання посівних рядків і міжрядь, розстилання захисної прозорої плівки, загортання країв плівки ґрунтом, контроль якості загортання країв плівки, який відрізняється тим, що на розмічених рядках виконують борозни, заглиблені у ґрунт на глибину 60-90 мм, трикутні у перетині, з кутом між стінками 60-90°, з насипами по обидві сторони, утвореними вибраним з них...
Спосіб борозенчастої сівби насіння
Номер патенту: 25940
Опубліковано: 27.08.2007
Автори: Івахненко Людмила Дмитрівна, Курило Василь Леонідович, Корженко Анна Миколаївна, Курило Алла Віталіївна
МПК: A01C 7/00
Мітки: насіння, борозенчастої, сівби, спосіб
Формула / Реферат:
Спосіб борозенчастої сівби насіння, що включає: утворення борозен у поверхневому шарі ґрунту; забезпечення дрібногрудкуватого поверхневого шару; створення вирівняного оптимально ущільненого насіннєвого ложа; знищення проростків бур'янів; загортання ґрунтових гербіцидів (при необхідності їх внесення); сівбу насіння у вологий ґрунт борозни на оптимальну глибину відносно її дна на вирівняне оптимально ущільнене насіннєве ложе, який відрізняється...
Спосіб сівби насіння в борозни
Номер патенту: 25930
Опубліковано: 27.08.2007
Автори: Курило Василь Леонідович, Корженко Микола Павлович, Курило Алла Віталіївна, Корженко Анна Миколаївна
МПК: A01C 5/00
Мітки: сівби, насіння, спосіб, борозни
Формула / Реферат:
Спосіб сівби насіння в борозни, що включає утворення борозен у поверхневому шарі ґрунту, забезпечення дрібногрудкуватого поверхневого шару, створення вирівняного оптимально ущільненого насіннєвого ложа, знищення проростків бур'янів, загортання ґрунтових гербіцидів (при необхідності їх внесення), сівбу насіння здвоєними рядками у вологий ґрунт борозни на необхідну глибину відносно її дна на оптимально ущільнене насіннєве ложе, який...
Спосіб сівби насіння та внесення добрив

Номер патенту: 49580
Опубліковано: 26.04.2010
Автори: Жернова Наталія Петрівна, Бойко Костянтин Якович, Білоконь Олександр Петрович, Вахненко Світлана Валеріївна, Чехов Анатолій Васильович
МПК: A01C 7/00
Мітки: насіння, внесення, спосіб, добрив, сівби
Формула / Реферат:
Спосіб сівби насіння та внесення добрив, що включає ранньовесняний та передпосівний обробіток ґрунту, різнорівневе формування посівних борозенкових лож та роздільний розподіл по їхній поверхні насіння та добрив з подальшою заробкою шаром ґрунту, який відрізняється тим, що припосівний розподіл насіння здійснюють завищеною на 10-15 % нормою висіву у суміжні синусоїдально-чергуючі борозенки, з котрих частину насінин зміщують у міжряддя при...
Попередній патент: Спосіб управління процесом класифікації в гідроциклонах
Наступний патент: Установка відцентрового лиття
Випадковий патент: Спосіб виробництва сталі у подовій печі