Цифровий коріолісівський вібраційний гіроскоп
Номер патенту: 101747
Опубліковано: 25.04.2013
Автори: Ніколаєнко Алла Вікторівна, Маляров Сергій Прокопович, Цирук Віктор Григорович
Формула / Реферат
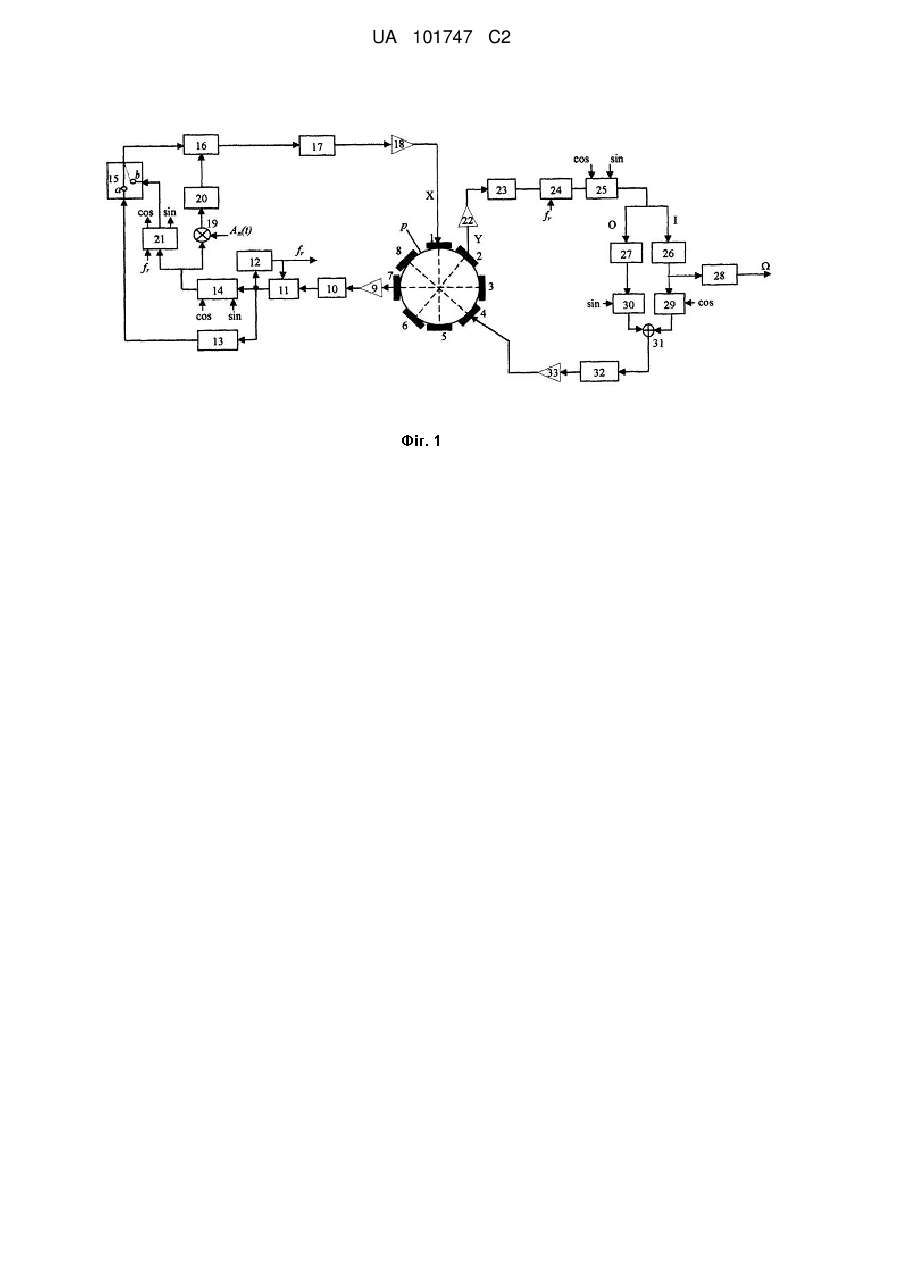
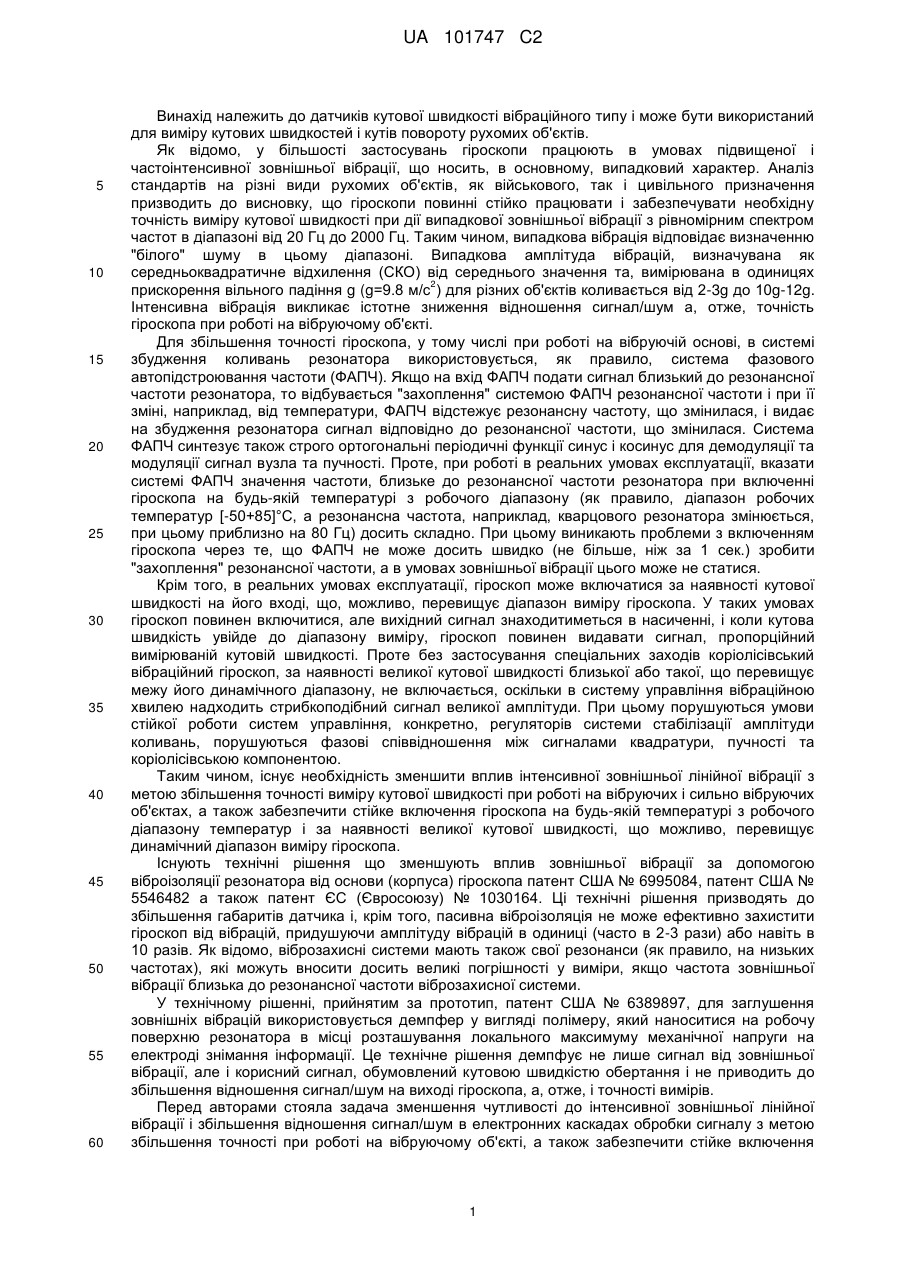
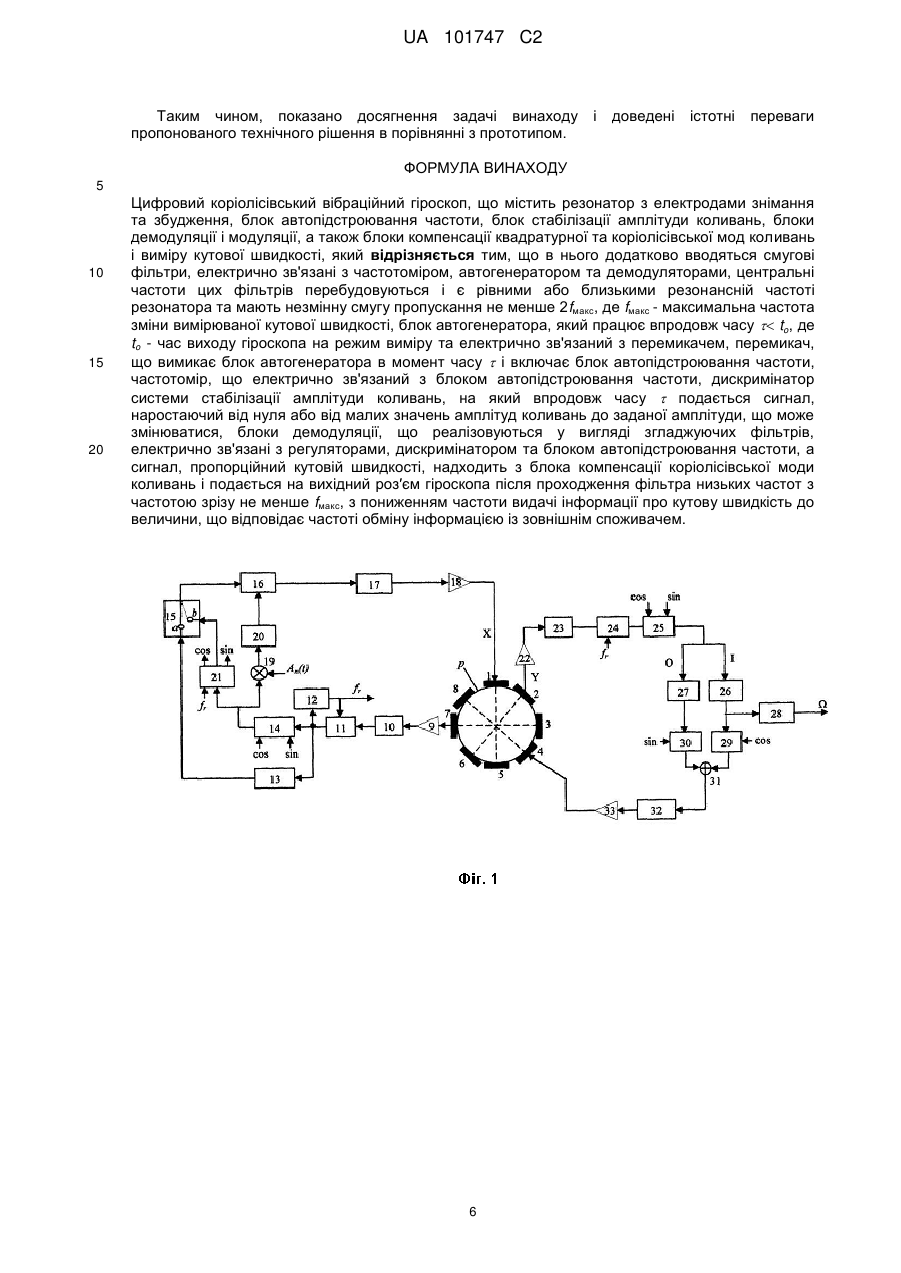
Цифровий коріолісівський вібраційний гіроскоп, що містить резонатор з електродами знімання та збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості, який відрізняється тим, що в нього додатково вводяться смугові фільтри, електрично зв'язані з частотоміром, автогенератором та демодуляторами, центральні частоти цих фільтрів перебудовуються і є рівними або близькими резонансній частоті резонатора та мають незмінну смугу пропускання не менше 2fмакс, де fмакс - максимальна частота зміни вимірюваної кутової швидкості, блок автогенератора, який працює впродовж часу t< to, де to - час виходу гіроскопа на режим виміру та електрично зв'язаний з перемикачем, перемикач, що вимикає блок автогенератора в момент часу t і включає блок автопідстроювання частоти, частотомір, що електрично зв'язаний з блоком автопідстроювання частоти, дискримінатор системи стабілізації амплітуди коливань, на який впродовж часу t подається сигнал, наростаючий від нуля або від малих значень амплітуд коливань до заданої амплітуди, що може змінюватися, блоки демодуляції, що реалізовуються у вигляді згладжуючих фільтрів, електрично зв'язані з регуляторами, дискримінатором та блоком автопідстроювання частоти, а сигнал, пропорційний кутовій швидкості, надходить з блока компенсації коріолісівської моди коливань і подається на вихідний роз′єм гіроскопа після проходження фільтра низьких частот з частотою зрізу не менше fмакс, з пониженням частоти видачі інформації про кутову швидкість до величини, що відповідає частоті обміну інформацією із зовнішнім споживачем.
Текст
Реферат: Винахід належить до датчиків кутової швидкості вібраційного типу. Цифровий коріолісівський вібраційний гіроскоп містить резонатор з електродами знімання та збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості. Додатково вводяться смугові фільтри, електрично зв'язані з частотоміром, автогенератором та демодуляторами, центральні частоти цих фільтрів перебудовуються і є рівними або близькими резонансній частоті резонатора та мають незмінну смугу пропускання не менше 2fмакс, де fмакс - максимальна частота зміни вимірюваної кутової швидкості, блок автогенератора, який працює впродовж часу to, де to - час виходу гіроскопа на режим виміру та електрично зв'язаний з перемикачем, перемикач, що вимикає блок автогенератора в момент часу і включає блок автопідстроювання частоти, частотомір, що електрично зв'язаний з блоком автопідстроювання частоти, дискримінатор системи стабілізації амплітуди коливань, на який впродовж часу подається сигнал, наростаючий від нуля або від малих значень амплітуд коливань до заданої амплітуди, що може змінюватися, блоки демодуляції, що реалізовуються у вигляді згладжуючих фільтрів, електрично зв'язані з регуляторами, дискримінатором та блоком автопідстроювання частоти. Винахід дозволяє збільшити точності виміру кутової швидкості при роботі на вібруючих та сильно вібруючих об'єктах. UA 101747 C2 (12) UA 101747 C2 UA 101747 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до датчиків кутової швидкості вібраційного типу і може бути використаний для виміру кутових швидкостей і кутів повороту рухомих об'єктів. Як відомо, у більшості застосувань гіроскопи працюють в умовах підвищеної і частоінтенсивної зовнішньої вібрації, що носить, в основному, випадковий характер. Аналіз стандартів на різні види рухомих об'єктів, як військового, так і цивільного призначення призводить до висновку, що гіроскопи повинні стійко працювати і забезпечувати необхідну точність виміру кутової швидкості при дії випадкової зовнішньої вібрації з рівномірним спектром частот в діапазоні від 20 Гц до 2000 Гц. Таким чином, випадкова вібрація відповідає визначенню "білого" шуму в цьому діапазоні. Випадкова амплітуда вібрацій, визначувана як середньоквадратичне відхилення (СКО) від середнього значення та, вимірювана в одиницях 2 прискорення вільного падіння g (g=9.8 м/с ) для різних об'єктів коливається від 2-3g до 10g-12g. Інтенсивна вібрація викликає істотне зниження відношення сигнал/шум а, отже, точність гіроскопа при роботі на вібруючому об'єкті. Для збільшення точності гіроскопа, у тому числі при роботі на вібруючій основі, в системі збудження коливань резонатора використовується, як правило, система фазового автопідстроювання частоти (ФАПЧ). Якщо на вхід ФАПЧ подати сигнал близький до резонансної частоти резонатора, то відбувається "захоплення" системою ФАПЧ резонансної частоти і при її зміні, наприклад, від температури, ФАПЧ відстежує резонансну частоту, що змінилася, і видає на збудження резонатора сигнал відповідно до резонансної частоти, що змінилася. Система ФАПЧ синтезує також строго ортогональні періодичні функції синус і косинус для демодуляції та модуляції сигнал вузла та пучності. Проте, при роботі в реальних умовах експлуатації, вказати системі ФАПЧ значення частоти, близьке до резонансної частоти резонатора при включенні гіроскопа на будь-якій температурі з робочого діапазону (як правило, діапазон робочих температур [-50+85]°С, а резонансна частота, наприклад, кварцового резонатора змінюється, при цьому приблизно на 80 Гц) досить складно. При цьому виникають проблеми з включенням гіроскопа через те, що ФАПЧ не може досить швидко (не більше, ніж за 1 сек.) зробити "захоплення" резонансної частоти, а в умовах зовнішньої вібрації цього може не статися. Крім того, в реальних умовах експлуатації, гіроскоп може включатися за наявності кутової швидкості на його вході, що, можливо, перевищує діапазон виміру гіроскопа. У таких умовах гіроскоп повинен включитися, але вихідний сигнал знаходитиметься в насиченні, і коли кутова швидкість увійде до діапазону виміру, гіроскоп повинен видавати сигнал, пропорційний вимірюваній кутовій швидкості. Проте без застосування спеціальних заходів коріолісівський вібраційний гіроскоп, за наявності великої кутової швидкості близької або такої, що перевищує межу його динамічного діапазону, не включається, оскільки в систему управління вібраційною хвилею надходить стрибкоподібний сигнал великої амплітуди. При цьому порушуються умови стійкої роботи систем управління, конкретно, регуляторів системи стабілізації амплітуди коливань, порушуються фазові співвідношення між сигналами квадратури, пучності та коріолісівською компонентою. Таким чином, існує необхідність зменшити вплив інтенсивної зовнішньої лінійної вібрації з метою збільшення точності виміру кутової швидкості при роботі на вібруючих і сильно вібруючих об'єктах, а також забезпечити стійке включення гіроскопа на будь-якій температурі з робочого діапазону температур і за наявності великої кутової швидкості, що можливо, перевищує динамічний діапазон виміру гіроскопа. Існують технічні рішення що зменшують вплив зовнішньої вібрації за допомогою віброізоляції резонатора від основи (корпуса) гіроскопа патент США № 6995084, патент США № 5546482 а також патент ЄС (Євросоюзу) № 1030164. Ці технічні рішення призводять до збільшення габаритів датчика і, крім того, пасивна віброізоляція не може ефективно захистити гіроскоп від вібрацій, придушуючи амплітуду вібрацій в одиниці (часто в 2-3 рази) або навіть в 10 разів. Як відомо, віброзахисні системи мають також свої резонанси (як правило, на низьких частотах), які можуть вносити досить великі погрішності у виміри, якщо частота зовнішньої вібрації близька до резонансної частоти віброзахисної системи. У технічному рішенні, прийнятим за прототип, патент США № 6389897, для заглушення зовнішніх вібрацій використовується демпфер у вигляді полімеру, який наноситися на робочу поверхню резонатора в місці розташування локального максимуму механічної напруги на електроді знімання інформації. Це технічне рішення демпфує не лише сигнал від зовнішньої вібрації, але і корисний сигнал, обумовлений кутовою швидкістю обертання і не приводить до збільшення відношення сигнал/шум на виході гіроскопа, а, отже, і точності вимірів. Перед авторами стояла задача зменшення чутливості до інтенсивної зовнішньої лінійної вібрації і збільшення відношення сигнал/шум в електронних каскадах обробки сигналу з метою збільшення точності при роботі на вібруючому об'єкті, а також забезпечити стійке включення 1 UA 101747 C2 5 10 15 20 25 30 35 40 45 50 гіроскопа на будь-якій температурі з робочого діапазону температур і наявності на його вході великої кутової швидкості, що, можливо, перевищує динамічний діапазон його вимірювання. Поставлена задача вирішується тим, що у коріолісівській вібраційний гіроскоп, що містить резонатор з електродами знімання, збудження, блок автопідстроювання частоти, блок стабілізації амплітуди коливань, блоки демодуляції і модуляції, а також блоки компенсації квадратурної та коріолісівської мод коливань і виміру кутової швидкості, додатково вводяться, смугові фільтри з центральними частотами, що перебудовуються та є рівною або близькою резонансній частоті резонатора, блок автогенератора, перемикач, частотомір, при цьому після подання живлення на гіроскоп, впродовж часу
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital coriolis vibratory gyroscope
Автори англійськоюMaliarov Serhii Prokopovych, Tsiruk Viktor Hryhorovych, Nikolaienko Alla Viktorivna
Назва патенту російськоюЦифровой кориолисов вибрационный гироскоп
Автори російськоюМаляров Сергей Прокофьевич, Цирук Виктор Григорьевич, Николаенко Алла Викторовна
МПК / Мітки
МПК: G01C 19/56
Мітки: гіроскоп, вібраційний, цифровий, коріолісівський
Код посилання
<a href="https://ua.patents.su/9-101747-cifrovijj-koriolisivskijj-vibracijjnijj-giroskop.html" target="_blank" rel="follow" title="База патентів України">Цифровий коріолісівський вібраційний гіроскоп</a>
Вібраційний гіроскоп, чутливий до коріолісового прискорення
Номер патенту: 22153
Опубліковано: 10.04.2007
Автори: Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович
МПК: G01C 19/56
Мітки: прискорення, коріолісового, вібраційний, чутливий, гіроскоп
Формула / Реферат:
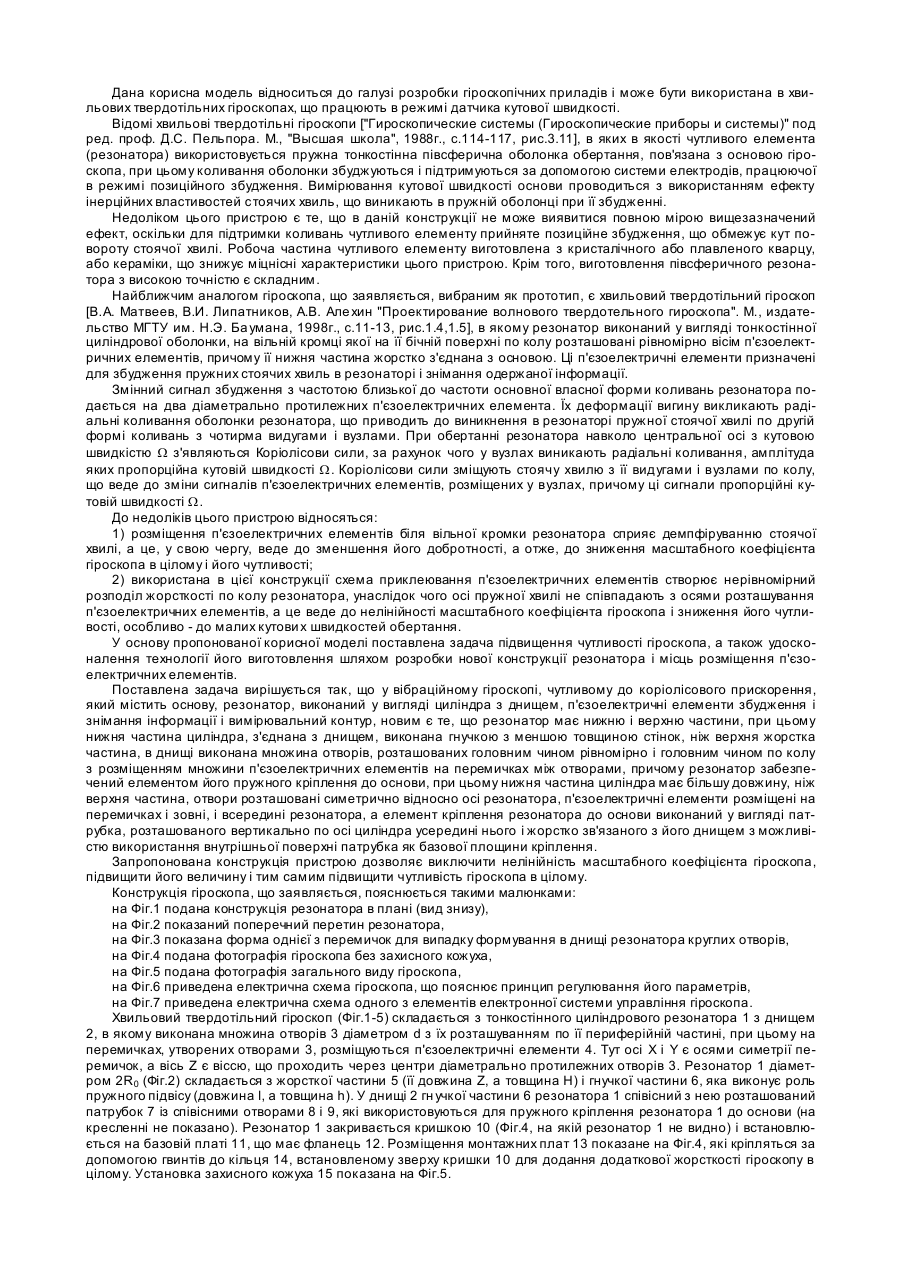
1. Вібраційний гіроскоп, чутливий до Коріолісового прискорення, який містить основу, резонатор, виконаний у вигляді циліндра з днищем, п'єзоелектричні елементи збудження і знімання інформації та вимірювальний контур, який відрізняється тим, що резонатор має нижню і верхню частини, при цьому нижня частина циліндра, з'єднана з днищем, виконана гнучкою з меншою товщиною стінок, ніж верхня жорстка частина, в днищі виконана множина отворів,...
Півсферичний резонаторний гіроскоп з складовим резонатором

Номер патенту: 24460
Опубліковано: 25.06.2007
Автори: Яценко Юрій Олексійович, Щербань Володимир Іванович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович
МПК: G01C 19/00
Мітки: складовим, гіроскоп, резонаторний, півсферичний, резонатором
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і оснащений отвором в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором...
Півсферичний резонаторний гіроскоп з складовим резонатором
Номер патенту: 24037
Опубліковано: 11.06.2007
Автори: Щербань Володимир Іванович, Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович, Яценко Юрій Олексійович
МПК: G01C 19/00
Мітки: півсферичний, гіроскоп, резонаторний, складовим, резонатором
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для підтримки коливань півсферичного резонатора і зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і містить отвір в його полюсі, кільцевий електрод збудження виконаний у...
Півсферичний резонаторний гіроскоп зі складовим резонатором
Номер патенту: 24057
Опубліковано: 11.06.2007
Автори: Яценко Юрій Олексійович, Щербань Володимир Іванович, Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович
МПК: G01C 19/00
Мітки: резонатором, резонаторний, складовим, гіроскоп, півсферичний
Формула / Реферат:
1. Півсферичний резонаторний гіроскоп зі складовим резонатором, що містить півсферичний резонатор і кільцевий електрод збудження, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і має отвір в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором по центру і з провідною поверхнею, розбитою на сегменти, які створюють окремі групи, перша з яких для подачі на її сегменти...
Лазерний гіроскоп “маспет”
Номер патенту: 13299
Опубліковано: 15.03.2006
Автори: Маслов Володимир Петрович, Петренко Сергій Федорович
МПК: H01S 3/08
Мітки: лазерний, гіроскоп, маспет
Формула / Реферат:
Лазерний гіроскоп, який складається з газорозрядної гелій-неонової трубки з вікнами Брюстера, системи дзеркал, оптичної системи для суміщення зустрічних хвиль на фотоелектричній системі реєстрації й системи, що забезпечує крутильні коливання кільцевого контуру лазерного гіроскопа навколо осі чутливості, який відрізняється тим, що в нього додатково уведені наноманіпулятори дзеркал, наноманіпулятори газорозрядних трубок, а також блок...
Попередній патент: Індукційний електронагрівач
Наступний патент: Стробоскопічний перетворювач
Випадковий патент: Інфундирний пристрій п.п. печерського