Півсферичний резонаторний гіроскоп з складовим резонатором
Номер патенту: 24037
Опубліковано: 11.06.2007
Автори: Чіковані Валерій Валеріанович, Щербань Володимир Іванович, Коваленко Володимир Анатолійович, Яценко Юрій Олексійович
Формула / Реферат
1. Півсферичний резонаторний гіроскоп з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємкісних електродів для підтримки коливань півсферичного резонатора і зняття інформації, розташованих у вузлах і пучностях коливань півсферичного резонатора, який відрізняється тим, що в ньому півсферичний резонатор виконаний без ніжки і містить отвір в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором по центру і з суцільною провідною поверхнею для подачі на неї змінної напруги з можливістю збудження коливань резонатора, при цьому півсферичний резонатор розміщений своїм полюсом над провідною поверхнею п'єзоелектричного диска і з'єднаний з ним за допомогою клейового з'єднання з можливістю усунення втрат енергії резонатора.
2. Півсферичний резонаторний гіроскоп з складовим резонатором за п. 1, який відрізняється тим, що круглий отвір півсферичного резонатора розташований над круглим отвором п'єзоелектричного диска, причому радіус його отвору співпадає з радіусом отвору півсферичного резонатора.
Текст
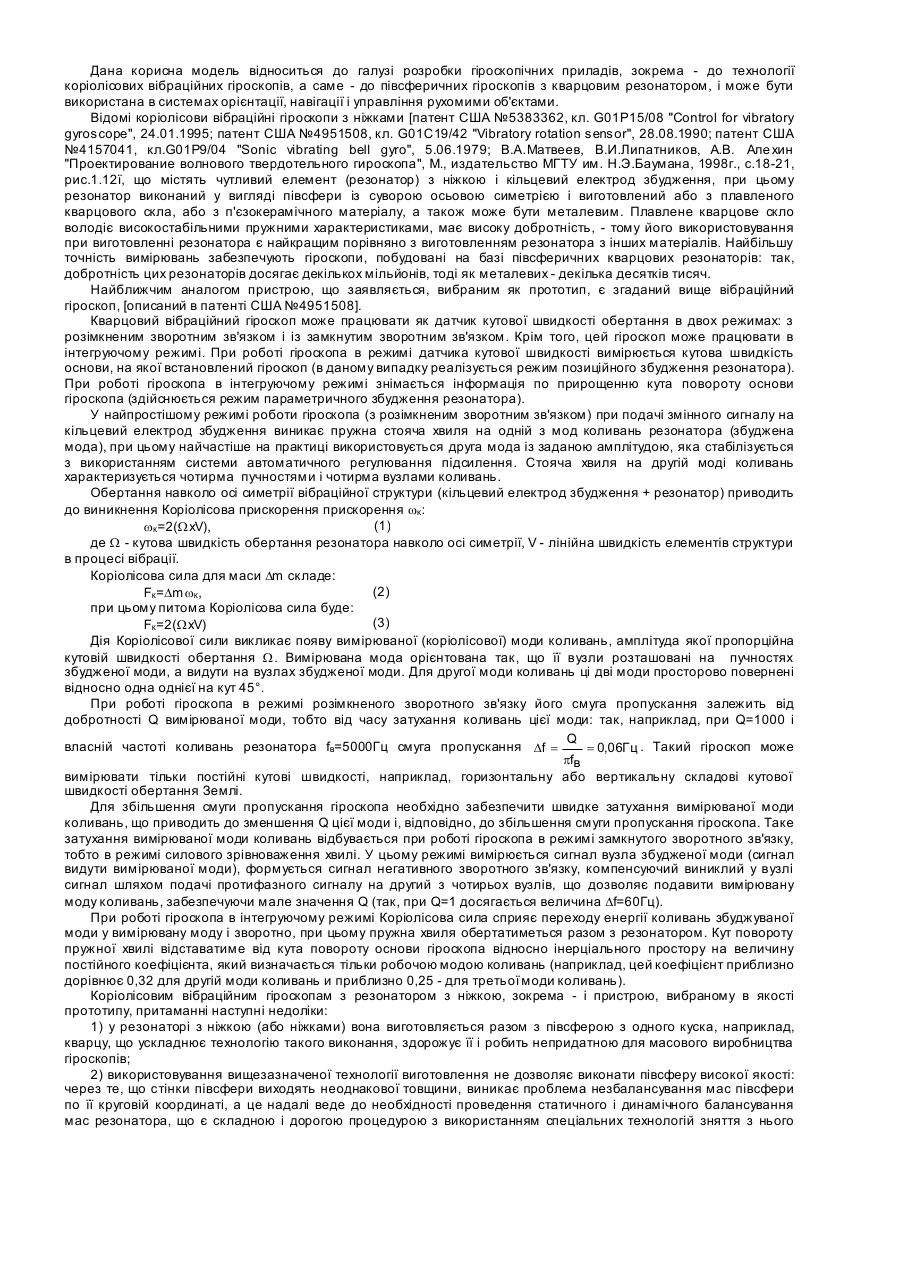
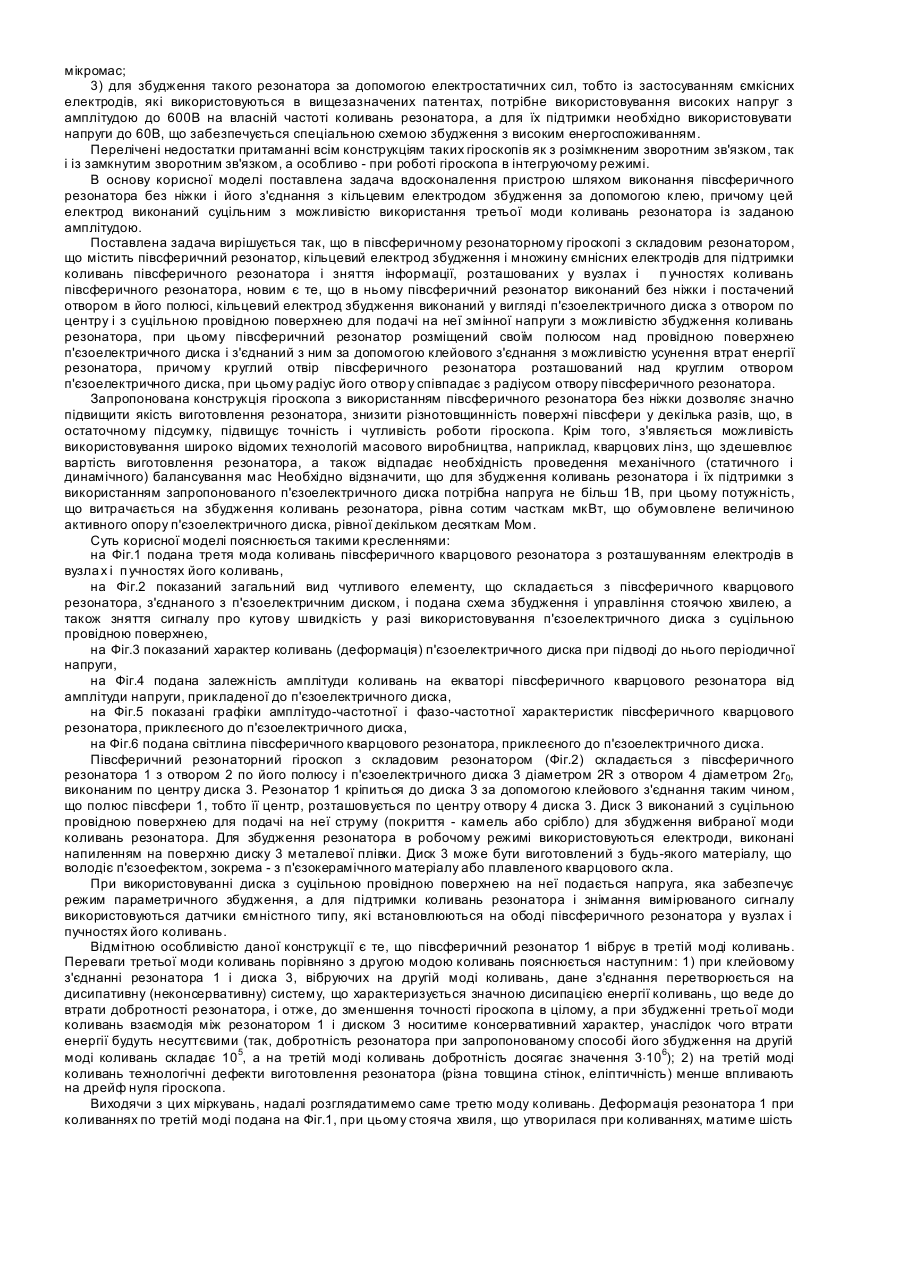
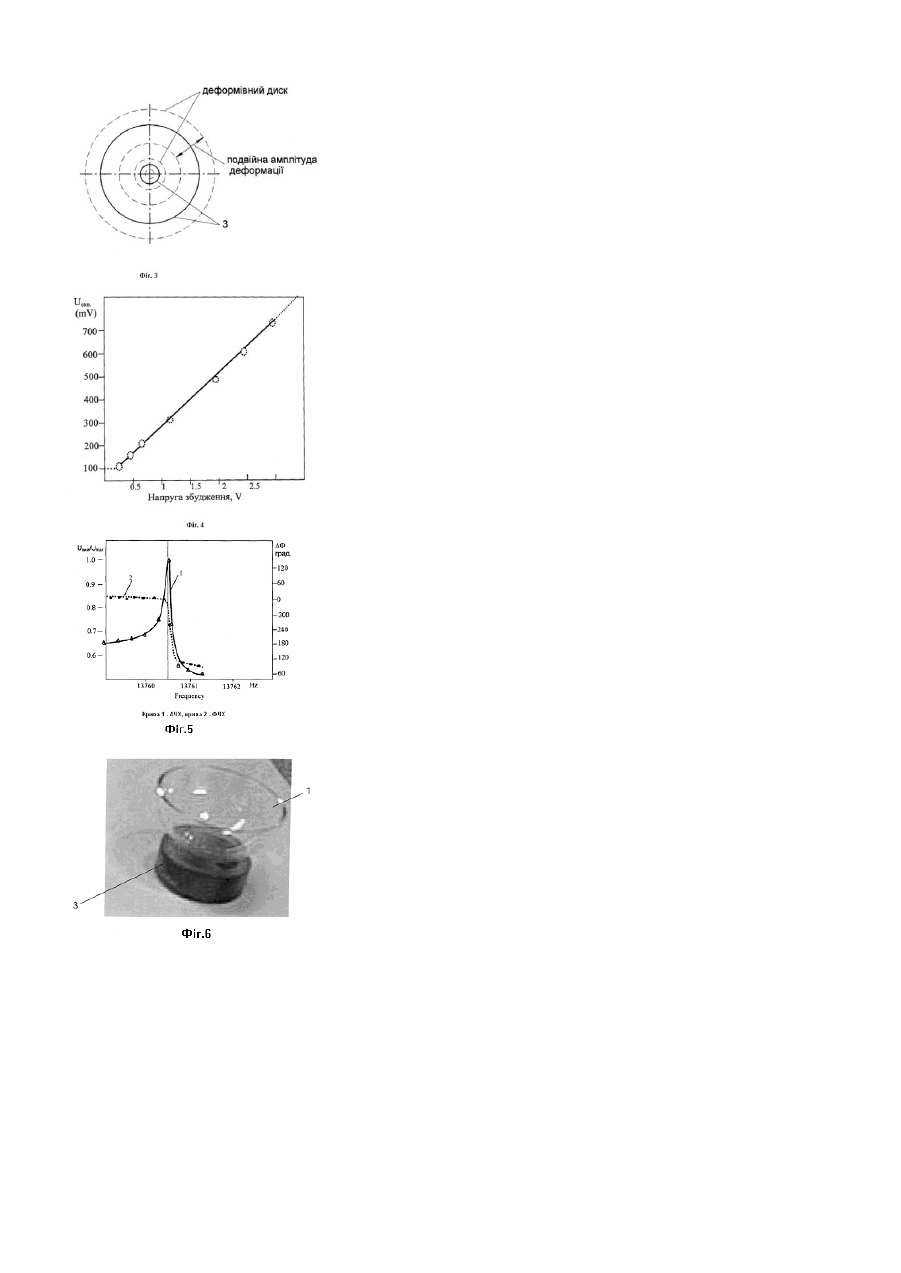
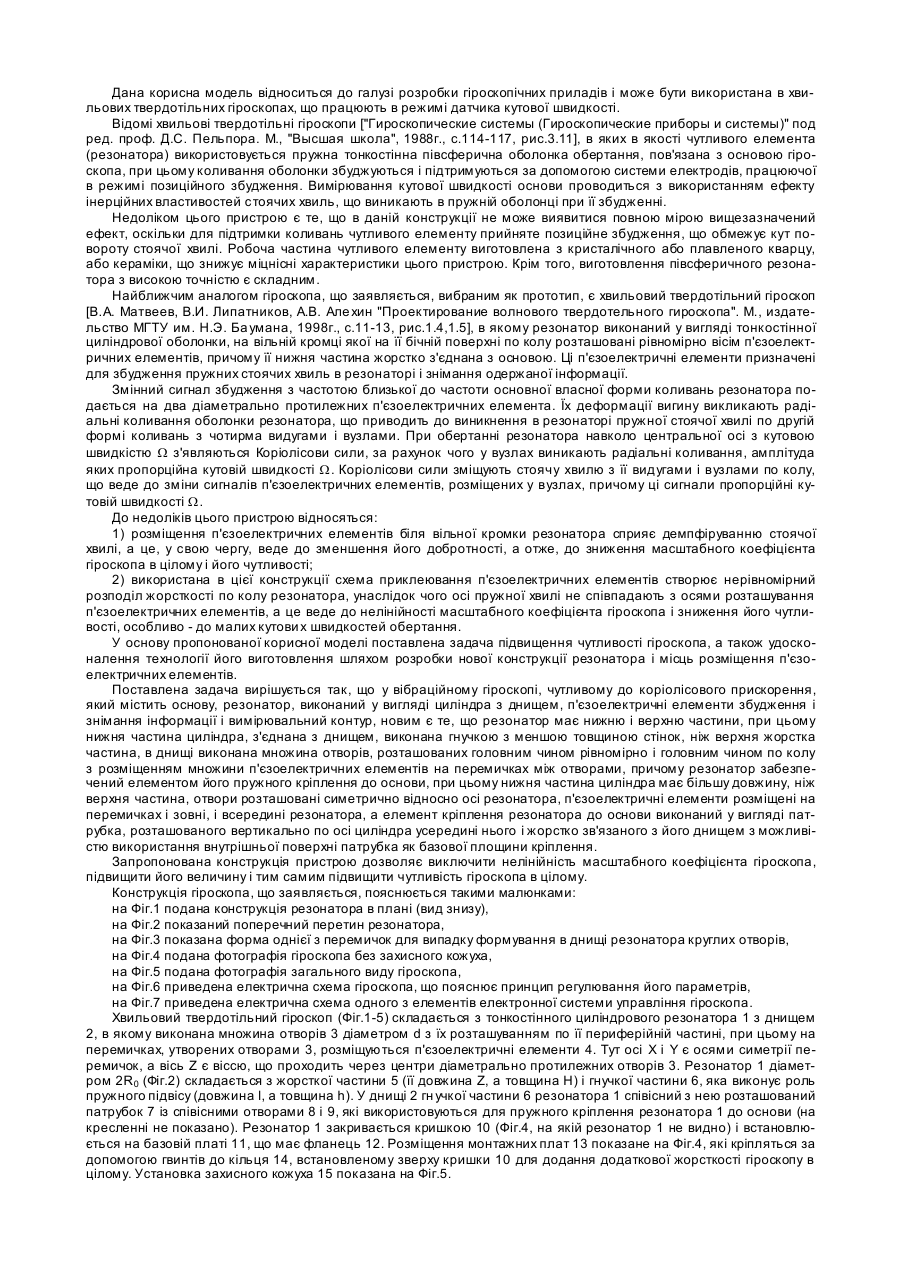
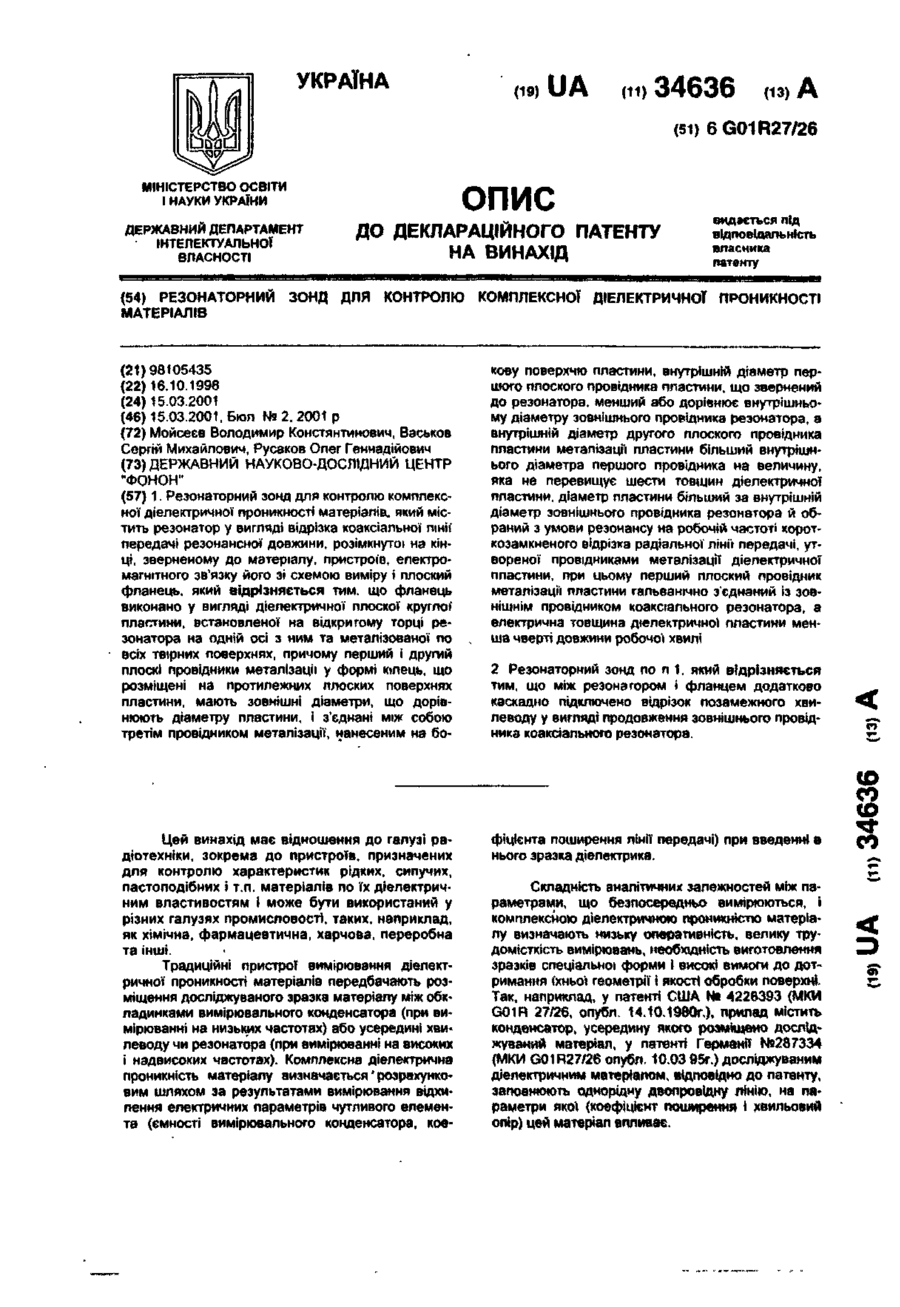
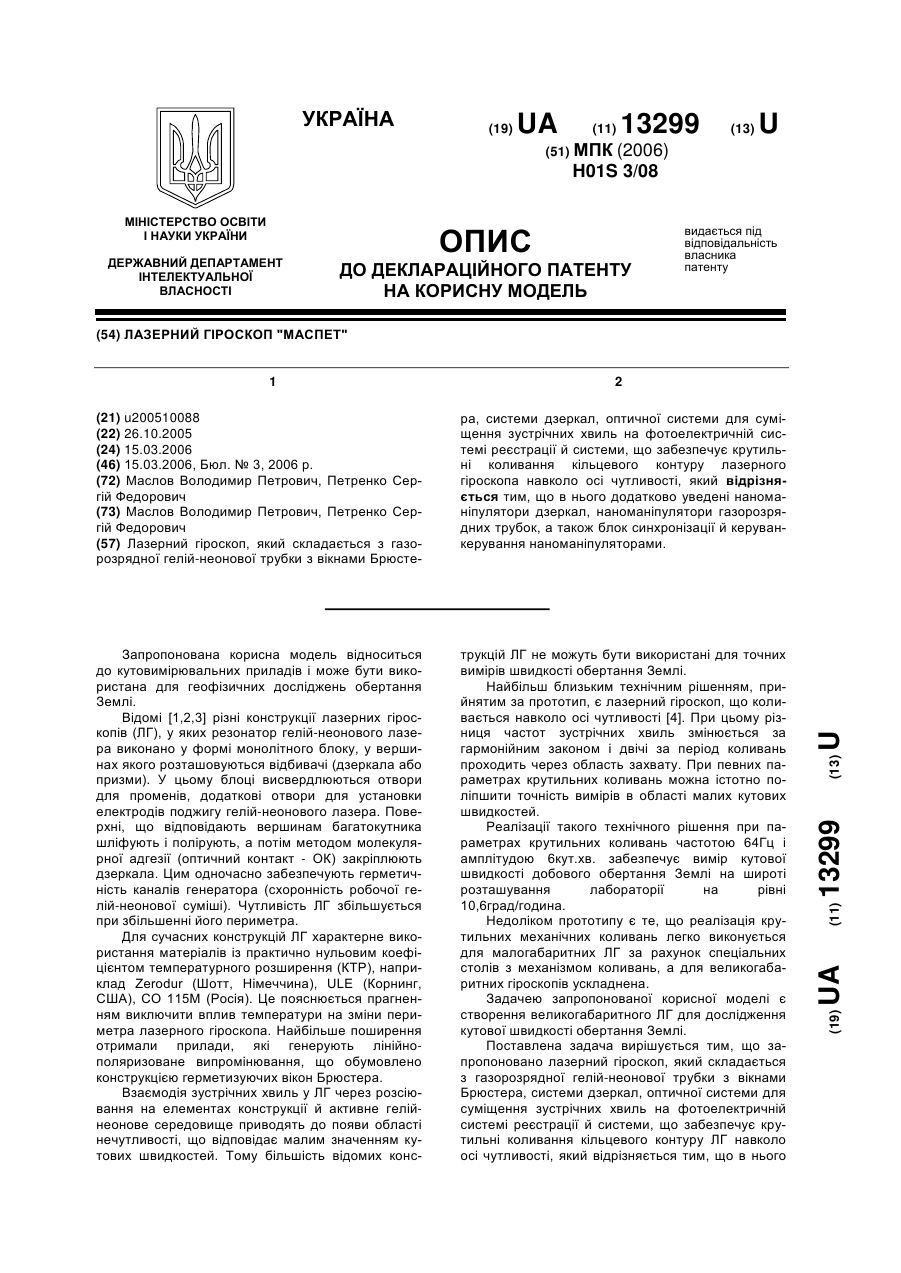
Дана корисна модель відноситься до галузі розробки гіроскопічних приладів, зокрема - до технології коріолісових вібраційних гіроскопів, а саме - до півсферичних гіроскопів з кварцовим резонатором, і може бути використана в системах орієнтації, навігації і управління рухомими об'єктами. Відомі коріолісови вібраційні гіроскопи з ніжками [патент США №5383362, кл. G01P15/08 "Control for vibratory gyroscope", 24.01.1995; патент США №4951508, кл. G01C19/42 "Vibratory rotation sensor", 28.08.1990; патент США №4157041, кл.G01P9/04 "Sonic vibrating bell gyro", 5.06.1979; В.А.Матвеев, В.И.Липатников, A.B. Але хин "Проектирование волнового твердотельного гироскопа", М., издательство МГТУ им. Н.Э.Баумана, 1998г., с.18-21, рис.1.12ї, що містять чутливий елемент (резонатор) з ніжкою і кільцевий електрод збудження, при цьому резонатор виконаний у вигляді півсфери із суворою осьовою симетрією і виготовлений або з плавленого кварцового скла, або з п'єзокерамічного матеріалу, а також може бути металевим. Плавлене кварцове скло володіє високостабільними пружними характеристиками, має високу добротність, - тому його використовування при виготовленні резонатора є найкращим порівняно з виготовленням резонатора з інших матеріалів. Найбільшу точність вимірювань забезпечують гіроскопи, побудовані на базі півсферичних кварцових резонаторів: так, добротність цих резонаторів досягає декількох мільйонів, тоді як металевих - декілька десятків тисяч. Найближчим аналогом пристрою, що заявляється, вибраним як прототип, є згаданий вище вібраційний гіроскоп, [описаний в патенті США №4951508]. Кварцовий вібраційний гіроскоп може працювати як датчик кутової швидкості обертання в двох режимах: з розімкненим зворотним зв'язком і із замкнутим зворотним зв'язком. Крім того, цей гіроскоп може працювати в інтегруючому режимі. При роботі гіроскопа в режимі датчика кутової швидкості вимірюється кутова швидкість основи, на якої встановлений гіроскоп (в даному випадку реалізується режим позиційного збудження резонатора). При роботі гіроскопа в інтегруючому режимі знімається інформація по прирощенню кута повороту основи гіроскопа (здійснюється режим параметричного збудження резонатора). У найпростішому режимі роботи гіроскопа (з розімкненим зворотним зв'язком) при подачі змінного сигналу на кільцевий електрод збудження виникає пружна стояча хвиля на одній з мод коливань резонатора (збуджена мода), при цьому найчастіше на практиці використовується друга мода із заданою амплітудою, яка стабілізується з використанням системи автоматичного регулювання підсилення. Стояча хвиля на другій моді коливань характеризується чотирма пучностями і чотирма вузлами коливань. Обертання навколо осі симетрії вібраційної структури (кільцевий електрод збудження + резонатор) приводить до виникнення Коріолісова прискорення прискорення wк : (1) wк =2(WхV), де W - кутова швидкість обертання резонатора навколо осі симетрії, V - лінійна швидкість елементів структури в процесі вібрації. Коріолісова сила для маси Dm складе: (2) Fк =Dmwк , при цьому питома Коріолісова сила буде: (3) Fк =2(WxV) Дія Коріолісової сили викликає появу вимірюваної (коріолісової) моди коливань, амплітуда якої пропорційна кутовій швидкості обертання W. Вимірювана мода орієнтована так, що її вузли розташовані на пучностях збудженої моди, а видути на вузлах збудженої моди. Для другої моди коливань ці дві моди просторово повернені відносно одна однієї на кут 45°. При роботі гіроскопа в режимі розімкненого зворотного зв'язку його смуга пропускання залежить від добротності Q вимірюваної моди, тобто від часу затухання коливань цієї моди: так, наприклад, при Q=1000 і Q власній частоті коливань резонатора fв=5000Гц смуга пропускання Df = = 0,06Гц . Такий гіроскоп може pfв вимірювати тільки постійні кутові швидкості, наприклад, горизонтальну або вертикальну складові кутової швидкості обертання Землі. Для збільшення смуги пропускання гіроскопа необхідно забезпечити швидке затухання вимірюваної моди коливань, що приводить до зменшення Q цієї моди і, відповідно, до збільшення смуги пропускання гіроскопа. Таке затухання вимірюваної моди коливань відбувається при роботі гіроскопа в режимі замкнутого зворотного зв'язку, тобто в режимі силового зрівноваження хвилі. У цьому режимі вимірюється сигнал вузла збудженої моди (сигнал видути вимірюваної моди), формується сигнал негативного зворотного зв'язку, компенсуючий виниклий у вузлі сигнал шляхом подачі протифазного сигналу на другий з чотирьох вузлів, що дозволяє подавити вимірювану моду коливань, забезпечуючи мале значення Q (так, при Q=1 досягається величина Df=60Гц). При роботі гіроскопа в інтегруючому режимі Коріолісова сила сприяє переходу енергії коливань збуджуваної моди у вимірювану моду і зворотно, при цьому пружна хвиля обертатиметься разом з резонатором. Кут повороту пружної хвилі відставатиме від кута повороту основи гіроскопа відносно інерціального простору на величину постійного коефіцієнта, який визначається тільки робочою модою коливань (наприклад, цей коефіцієнт приблизно дорівнює 0,32 для другій моди коливань и приблизно 0,25 - для третьої моди коливань). Коріолісовим вібраційним гіроскопам з резонатором з ніжкою, зокрема - і пристрою, вибраному в якості прототипу, притаманні наступні недоліки: 1) у резонаторі з ніжкою (або ніжками) вона виготовляється разом з півсферою з одного куска, наприклад, кварцу, що ускладнює технологію такого виконання, здорожує її і робить непридатною для масового виробництва гіроскопів; 2) використовування вищезазначеної технології виготовлення не дозволяє виконати півсферу високої якості: через те, що стінки півсфери виходять неоднакової товщини, виникає проблема незбалансування мас півсфери по її круговій координаті, а це надалі веде до необхідності проведення статичного і динамічного балансування мас резонатора, що є складною і дорогою процедурою з використанням спеціальних технологій зняття з нього мікромас; 3) для збудження такого резонатора за допомогою електростатичних сил, тобто із застосуванням ємкісних електродів, які використовуються в вищезазначених патентах, потрібне використовування високих напруг з амплітудою до 600В на власній частоті коливань резонатора, а для їх підтримки необхідно використовувати напруги до 60В, що забезпечується спеціальною схемою збудження з високим енергоспоживанням. Перелічені недостатки притаманні всім конструкціям таких гіроскопів як з розімкненим зворотним зв'язком, так і із замкнутим зворотним зв'язком, а особливо - при роботі гіроскопа в інтегруючому режимі. В основу корисної моделі поставлена задача вдосконалення пристрою шляхом виконання півсферичного резонатора без ніжки і його з'єднання з кільцевим електродом збудження за допомогою клею, причому цей електрод виконаний суцільним з можливістю використання третьої моди коливань резонатора із заданою амплітудою. Поставлена задача вирішується так, що в півсферичному резонаторному гіроскопі з складовим резонатором, що містить півсферичний резонатор, кільцевий електрод збудження і множину ємнісних електродів для підтримки коливань півсферичного резонатора і зняття інформації, розташованих у вузлах і п учностях коливань півсферичного резонатора, новим є те, що в ньому півсферичний резонатор виконаний без ніжки і постачений отвором в його полюсі, кільцевий електрод збудження виконаний у вигляді п'єзоелектричного диска з отвором по центру і з суцільною провідною поверхнею для подачі на неї змінної напруги з можливістю збудження коливань резонатора, при цьому півсферичний резонатор розміщений своїм полюсом над провідною поверхнею п'єзоелектричного диска і з'єднаний з ним за допомогою клейового з'єднання з можливістю усунення втрат енергії резонатора, причому круглий отвір півсферичного резонатора розташований над круглим отвором п'єзоелектричного диска, при цьому радіус його отвор у співпадає з радіусом отвору півсферичного резонатора. Запропонована конструкція гіроскопа з використанням півсферичного резонатора без ніжки дозволяє значно підвищити якість виготовлення резонатора, знизити різнотовщинність поверхні півсфери у декілька разів, що, в остаточному підсумку, підвищує точність і чутливість роботи гіроскопа. Крім того, з'являється можливість використовування широко відомих технологій масового виробництва, наприклад, кварцових лінз, що здешевлює вартість виготовлення резонатора, а також відпадає необхідність проведення механічного (статичного і динамічного) балансування мас Необхідно відзначити, що для збудження коливань резонатора і їх підтримки з використанням запропонованого п'єзоелектричного диска потрібна напруга не більш 1В, при цьому потужність, що витрачається на збудження коливань резонатора, рівна сотим часткам мкВт, що обумовлене величиною активного опору п'єзоелектричного диска, рівної декільком десяткам Мом. Суть корисної моделі пояснюється такими кресленнями: на Фіг.1 подана третя мода коливань півсферичного кварцового резонатора з розташуванням електродів в вузлах і п учностях його коливань, на Фіг.2 показаний загальний вид чутливого елементу, що складається з півсферичного кварцового резонатора, з'єднаного з п'єзоелектричним диском, і подана схема збудження і управління стоячою хвилею, а також зняття сигналу про кутову швидкість у разі використовування п'єзоелектричного диска з суцільною провідною поверхнею, на Фіг.3 показаний характер коливань (деформація) п'єзоелектричного диска при підводі до нього періодичної напруги, на Фіг.4 подана залежність амплітуди коливань на екваторі півсферичного кварцового резонатора від амплітуди напруги, прикладеної до п'єзоелектричного диска, на Фіг.5 показані графіки амплітудо-частотної і фазо-частотної характеристик півсферичного кварцового резонатора, приклеєного до п'єзоелектричного диска, на Фіг.6 подана світлина півсферичного кварцового резонатора, приклеєного до п'єзоелектричного диска. Півсферичний резонаторний гіроскоп з складовим резонатором (Фіг.2) складається з півсферичного резонатора 1 з отвором 2 по його полюсу і п'єзоелектричного диска 3 діаметром 2R з отвором 4 діаметром 2r0, виконаним по центру диска 3. Резонатор 1 кріпиться до диска 3 за допомогою клейового з'єднання таким чином, що полюс півсфери 1, тобто її центр, розташовується по центру отвору 4 диска 3. Диск 3 виконаний з суцільною провідною поверхнею для подачі на неї струму (покриття - камель або срібло) для збудження вибраної моди коливань резонатора. Для збудження резонатора в робочому режимі використовуються електроди, виконані напиленням на поверхню диску 3 металевої плівки. Диск 3 може бути виготовлений з будь-якого матеріалу, що володіє п'єзоефектом, зокрема - з п'єзокерамічного матеріалу або плавленого кварцового скла. При використовуванні диска з суцільною провідною поверхнею на неї подається напруга, яка забезпечує режим параметричного збудження, а для підтримки коливань резонатора і знімання вимірюваного сигналу використовуються датчики ємністного типу, які встановлюються на ободі півсферичного резонатора у вузлах і пучностях його коливань. Відмітною особливістю даної конструкції є те, що півсферичний резонатор 1 вібрує в третій моді коливань. Переваги третьої моди коливань порівняно з другою модою коливань пояснюється наступним: 1) при клейовому з'єднанні резонатора 1 і диска 3, вібруючих на другій моді коливань, дане з'єднання перетворюється на дисипативну (неконсервативну) систему, що характеризується значною дисипацією енергії коливань, що веде до втрати добротності резонатора, і отже, до зменшення точності гіроскопа в цілому, а при збудженні третьої моди коливань взаємодія між резонатором 1 і диском 3 носитиме консервативний характер, унаслідок чого втрати енергії будуть несуттєвими (так, добротність резонатора при запропонованому способі його збудження на другій моді коливань складає 105, а на третій моді коливань добротність досягає значення 3×106); 2) на третій моді коливань технологічні дефекти виготовлення резонатора (різна товщина стінок, еліптичність) менше впливають на дрейф нуля гіроскопа. Виходячи з цих міркувань, надалі розглядатимемо саме третю моду коливань. Деформація резонатора 1 при коливаннях по третій моді подана на Фіг.1, при цьому стояча хвиля, що утворилася при коливаннях, матиме шість пучностей, розташованих по осях 1-1’, 3-3’, 5-5' і шість вузлів коливань, розташованих по осях 2-2’,4-4’,6-6’. Процес збудження резонатора 1 п'єзоелектричним диском 3 полягає у тому, що під дією змінної напруги диск 3 створює рівномірно-розподілене навантаження f0 уздовж його внутрішньої границі, величина якого визначається (Фіг.2): d31EnhRcp f0 = U (4) r0 + w(q ) , де d31, Еn - відповідно п'єзоелектричний модуль і модуль Юнга матеріалу диска, Rcp - середній радіус диска, h - його середня товщина, r0 - внутрішній радіус диска, w(q) - амплітуда його радіальної деформації, q - координата по твірній півсфери, U - прикладена напруга. Компонента сили, яка діє по нормалі до поверхні півсфери (Фіг.2), може бути представлена як r fn = f0 R , (5) де R - радіус півсфери, r=r0+w(q). Розкладання цієї сили в ряд по ступенях малих переміщень w з точністю до величин першого порядку малості дає значення d31EnRcpU fw w (6) Rr0 , æ pö q w(q) = w0 ç q = ÷(n + cosq )tg n 2ø 2 , q в області контакту з п'єзоелектричним диском може бути подана як è де n ær ö æpö w(q) = w0 (n + 1)ç 0 ÷ w0 ç ÷ ç ÷ ç ÷ 2R ø , n=3 - номер моди коливань, è è 2 ø - амплітуда деформацій резонатора в області його екватора. Рівняння вимушеного руху резонатора 1, що обертається у своїй площині з кутовою швидкістю W навколо осі симетрії і який зазнає дію зовнішнього розподіленого навантаження, запишеться в частинних похідних для змінної w: && && & & & w" - w + 4Ww' + k 2 ( VI + 2wIV + w'' ) + k 2x (& VI + 2wIV + w'' ) = w''F0 sin nt , w w (7) k2 = EI rSR 4 Е - модуль Юнга матеріалу резонатора, I - момент інерції резонатора відносно осі симетрії, S де, площа його поперечного перетину, r - густина матеріалу резонатора, x - коефіцієнт, що характеризує втрати енергії в резонаторі, тобто його добротність, F0 - приведена сила, прикладена до резонатора, параметр n частота напруги збудження. Рівняння (7) записано для умов подачі на п'єзоелектричний диск 3 змінної напруги з частотою близькою до власної частоти робочої (третьої) моди коливань резонатора U=U0cosnt. Величина F0 запишеться: d31EnRcphU0 (n + 1)æ r0 ç ç n ö (8) ÷ Rr0 rS 2R ÷ , è ø де n=3, U 0 - амплітуда напруги збудження. Якщо резонатор 1 не деформований, то розподілене навантаження врівноважується його внутрішньою напругою. Під дією сили F0 резонатор 1 починає деформуватися, причому його деформації характеризуються певною власною формою (модою) згинальних коливань. При цьому в точках максимального зміщення деформованого резонатора 1 розподілена сила діє сильніше, ніж в точках мінімального зміщення. Допущена амплітуда деформації wmах(q) визначається жорсткістю (еластичністю) кріплення півсферичного резонатора 1 до п'єзоелектричного диска 3, а саме - еластичністю клейового з'єднання. У пропонованій конструкції гіроскопа третя мода коливань резонатора 1, як вже згадувалося, є найкращою, оскільки вона визначає консервативний характер взаємодії резонатора 1 з п'єзоелектричним диском 3 (в місцях кріплення резонатора 1 до п'єзоелектричного диску 3 амплітуда деформацій по другий формі коливань на порядок більше, ніж на третій, а це визначає характер взаємодії резонатора 1 и диска 3 - дисипативний або консервативний). Розгляд умов існування обмежених коливань резонатора 1 згідно рівняння (7) дозволяє знайти мінімальне значення вихідної напруги U0min і його залежність від параметрів чутливого елементу, при цьому перевищення величини цієї напруги забезпечує стійке збудження резонатора з умови F0³p, дe p = 18 xI - декремент 4 5r SR F0 = затухання коливань резонатора. Отже, 18 xI U0 min » 3 5R KЭМ an (q ) , Де KЭМ = d31EnRcph r0 коефіцієнт (9) електромеханічного перетворення п'єзоелектричного диска, r a n = (n + 1) 0 . 2R Таким чином, рівень шуму кривої збудження визначається втратами енергії в резонаторі 1(x), його параметрами (радіусом R, моментом інерції I) і залежить від параметрів п'єзоелектричного диска 3 (КЭМ). Розглянемо роботу п'єзоелектричного диска 3 в запропонованій конструкції гіроскопа. При використовуванні даного п'єзоелектричного диска 3 управління стоячою хвилею і знімання вимірюваних сигналів здійснюється за допомогою ємкісних електродів, як показано на Фіг.2 і описано у вищенаведених патентах. Півсферичний резонатор 1 кріпиться до п'єзоелектричного диска 3, виконаному так, що радіусу його внутрішнього отвору співпадає з радіусом отвору в полюсі півсфери 1. Збудження цього п'єзоелектричного диска 3 забезпечується шляхом подачі на нього напруги U=Uo sinnt, при цьому диск 3 деформується і, як описувалося вище, сила Fosinnt діє на резонатор 1, викликаючи коливання по третій моді. В цьому випадку сигнали управління стоячою хвилею подаються на ємкісні електроди 2, 4', 6, а знімання вимірюваних сигналів здійснюється з електродів 2', 4, 6'. Характер деформації при використовуванні диска 3 показаний на Фіг.3. Перевага пропонованого технічного рішення полягає у тому, що у разі неідеальності виготовлення резонатора 1 усуваються втрати енергії через його полюс і клейове з'єднання п'єзоелектричного диска 3 з резонатором 1, амплітуда коливань якого збільшується із зростанням незбалансування його мас. Крім того, в пропонованій конструкції кварцового півсферичного резонатора 1 для виникнення збудження його коливань і їх підтримки достатньо використовувати напругу, яка не перевищує 1В (Фіг.4), що пов'язано з п'єзоелектричними властивостями матеріалу диска 3, тоді як в конструкції гіроскопа, вибраного як прототип, як вже згадувалося, для цих же цілей використовується електростатичне поле, що вимагає для виникнення збудження коливань напруги 600В, а для їх підтримки - 60В. На Фіг.5 показані амплітудо-частотна і фазо-частотна характеристики пропонованого півсферичного Uв им резонатора 1, який закріплений на диску 3 за допомогою клейового з'єднання: тут Umax - відношення вимірюваної напруги до максимальної напруги, яка реалізується на резонансній частоті. Добротність третьої моди коливань для даного резонатора складає 1,2×106, а власна частота третьої моди коливань рівна 13760,7Гц. Світлина півсферичного кварцового резонатора 1, встановленого на диску 3 за допомогою клейового з'єднання, подана на Фіг.6: у цій конструкції діаметр кварцової півсфери 1 рівний 30мм, а діаметр диска 3 складає 20 мм, діаметр отвору на диску 3 і діаметр отвору в полюсі резонатора 1 ~ рівні 4мм.
ДивитисяДодаткова інформація
Назва патенту англійськоюHemi-spherical resonator gyroscope with component resonator
Назва патенту російськоюПолусферический резонаторный гироскоп с составным резонатором
МПК / Мітки
МПК: G01C 19/00
Мітки: півсферичний, резонаторний, складовим, резонатором, гіроскоп
Код посилання
<a href="https://ua.patents.su/5-24037-pivsferichnijj-rezonatornijj-giroskop-z-skladovim-rezonatorom.html" target="_blank" rel="follow" title="База патентів України">Півсферичний резонаторний гіроскоп з складовим резонатором</a>
Вібраційний гіроскоп, чутливий до коріолісового прискорення
Номер патенту: 22153
Опубліковано: 10.04.2007
Автори: Коваленко Володимир Анатолійович, Чіковані Валерій Валеріанович, Яценко Юрій Олексійович
МПК: G01C 19/56
Мітки: коріолісового, гіроскоп, чутливий, вібраційний, прискорення
Формула / Реферат:
1. Вібраційний гіроскоп, чутливий до Коріолісового прискорення, який містить основу, резонатор, виконаний у вигляді циліндра з днищем, п'єзоелектричні елементи збудження і знімання інформації та вимірювальний контур, який відрізняється тим, що резонатор має нижню і верхню частини, при цьому нижня частина циліндра, з'єднана з днищем, виконана гнучкою з меншою товщиною стінок, ніж верхня жорстка частина, в днищі виконана множина отворів,...
Інтегральний мікрополозковий резонаторний зонд мікрохвильового мікроскопа

Номер патенту: 71456
Опубліковано: 15.11.2004
Автори: Гордієнко Юрій Омелянович, Сліпченко Микола Іванович, Рябухін Олексій Олександрович
МПК: G01N 22/00
Мітки: резонаторний, інтегральній, мікроскопа, мікрополозковий, мікрохвильового, зонд
Формула / Реферат:
Інтегральний мікрополозковий НВЧ резонаторний зонд мікрохвильового мікроскопа, що містить інтегровані на одній діелектричній чи напівпровідниковій підкладці НВЧ-генератор, вихід якого з'єднаний з циркулятором, що також з'єднаний з детектором, та сенсор, який складається з фідера та резонатора, який відрізняється тим, що в нього введено додаткові сенсори, причому в кожен сенсор введено фазообертач, що з'єднаний з фідером і резонатором,...
Резонаторний зонд для контролю комплексної діелектричної проникності матеріалів
Номер патенту: 34636
Опубліковано: 15.03.2001
Автори: Мойсеєв Володимир Констянтинович, Русаков Олег Геннадійович, Васьков Сергій Михайлович
МПК: G01R 27/26
Мітки: діелектричної, резонаторний, матеріалів, контролю, зонд, проникності, комплексної
Формула / Реферат:
1. Резонаторний зонд для контролю комплексної діелектричної проникності матеріалів, який містить резонатор у вигляді відрізка коаксіальної пінії передачі резонансної довжини, розімкнутої на кінці, зверненому до матеріалу, пристроїв, електромагнітного зв'язку його зі схемою виміру і плоский фланець, який відрізняється тим, що фланець виконано у вигляді діелектричної плоскої круглої пластини, встановленої на відкритому торці резонатора на одній...
Лазерний гіроскоп “маспет”
Номер патенту: 13299
Опубліковано: 15.03.2006
Автори: Петренко Сергій Федорович, Маслов Володимир Петрович
МПК: H01S 3/08
Мітки: маспет, лазерний, гіроскоп
Формула / Реферат:
Лазерний гіроскоп, який складається з газорозрядної гелій-неонової трубки з вікнами Брюстера, системи дзеркал, оптичної системи для суміщення зустрічних хвиль на фотоелектричній системі реєстрації й системи, що забезпечує крутильні коливання кільцевого контуру лазерного гіроскопа навколо осі чутливості, який відрізняється тим, що в нього додатково уведені наноманіпулятори дзеркал, наноманіпулятори газорозрядних трубок, а також блок...
Динамічно настроюваний гіроскоп

Номер патенту: 5416
Опубліковано: 15.03.2005
Автори: Черевуха Світлана Сергіївна, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: G01C 19/00, G01P 9/00
Мітки: динамічної, настроюваний, гіроскоп
Формула / Реферат:
Динамічно настроюваний гіроскоп, що містить послідовно з'єднані ротор, пружний підвіс, вал та електропривід, який відрізняється тим, що він містить другий електропривід, причому вал першого електропривода через перший редуктор, перший тахогенератор і перший масштабний перетворювач підключений до другого входу другого суматора, вихід якого з'єднаний з входом другого підсилювача, з'єднаного з входом другого електропривода, вал другого...
Попередній патент: Спосіб розміщення волосини в ювелірних виробах
Наступний патент: Спосіб лікування хронічного кандидозу слизової оболонки порожнини рота
Випадковий патент: Армований блок дрібнозбірного перекриття