Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури
Номер патенту: 105052
Опубліковано: 10.04.2014
Автори: Куля Дмитро Миколайович, Карташов Володимир Михайлович, Бабкін Станіслав Іванович
Формула / Реферат
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вихідний сигнал радіоприймача з кожного рівня траси зондування піддають кореляційній обробці, опорні сигнали для кореляційного прийому формують у відповідності до функції розсіювання для кожного рівня траси зондування, сигнал після кореляційної обробки піддають корекції відповідно до функції E(q) = ![]() F2(r,q)dr, визначають параметр розстроювання умови Брегга q для кожного рівня траси зондування, параметр q використовують для розрахунку температури повітря для кожної точки вертикального профілю температури, який відрізняється тим, що для кореляційної обробки для кожного рівня траси зондування формують два опорних сигнали, форма яких визначається значенням q на минулому рівні траси зондування, що дозволяє працювати в слідкувальному режимі, а для визначення параметра розстроювання умови Брегга q для кожного рівня траси зондування використовують різницю між амплітудами сигналів двох кореляторів після корекції та значення параметра розстроювання умови Брегга q попереднього рівня траси зондування.
F2(r,q)dr, визначають параметр розстроювання умови Брегга q для кожного рівня траси зондування, параметр q використовують для розрахунку температури повітря для кожної точки вертикального профілю температури, який відрізняється тим, що для кореляційної обробки для кожного рівня траси зондування формують два опорних сигнали, форма яких визначається значенням q на минулому рівні траси зондування, що дозволяє працювати в слідкувальному режимі, а для визначення параметра розстроювання умови Брегга q для кожного рівня траси зондування використовують різницю між амплітудами сигналів двох кореляторів після корекції та значення параметра розстроювання умови Брегга q попереднього рівня траси зондування.
Текст
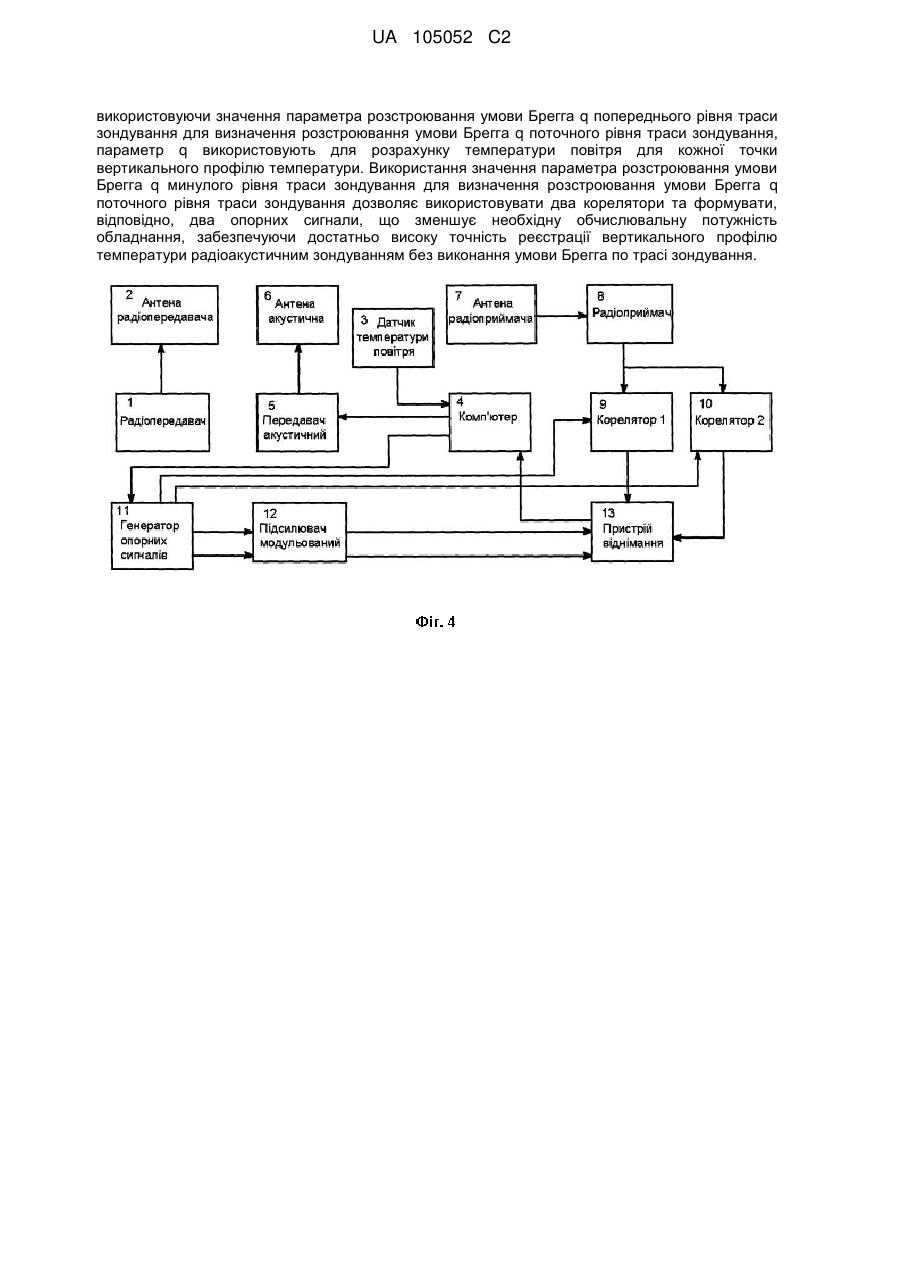
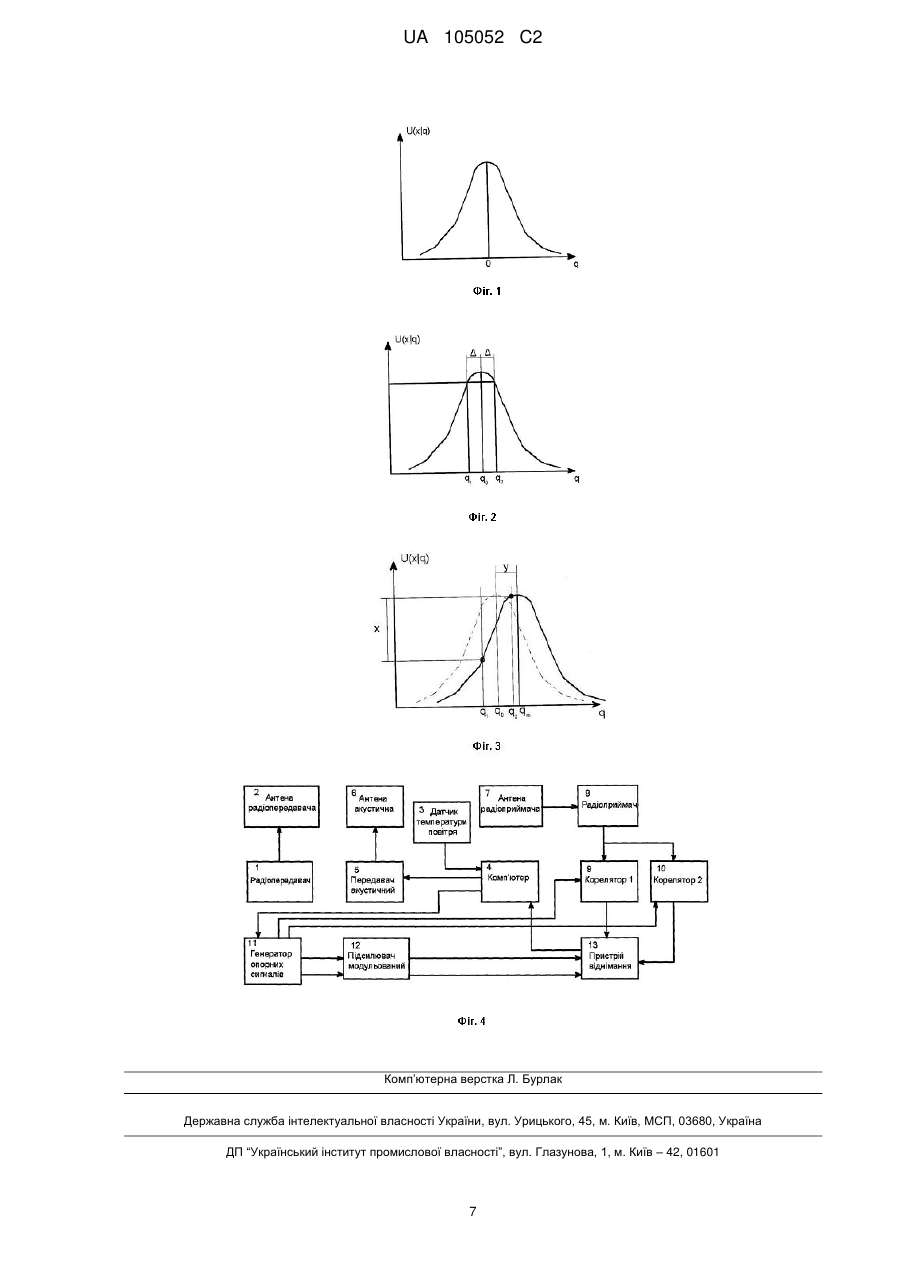
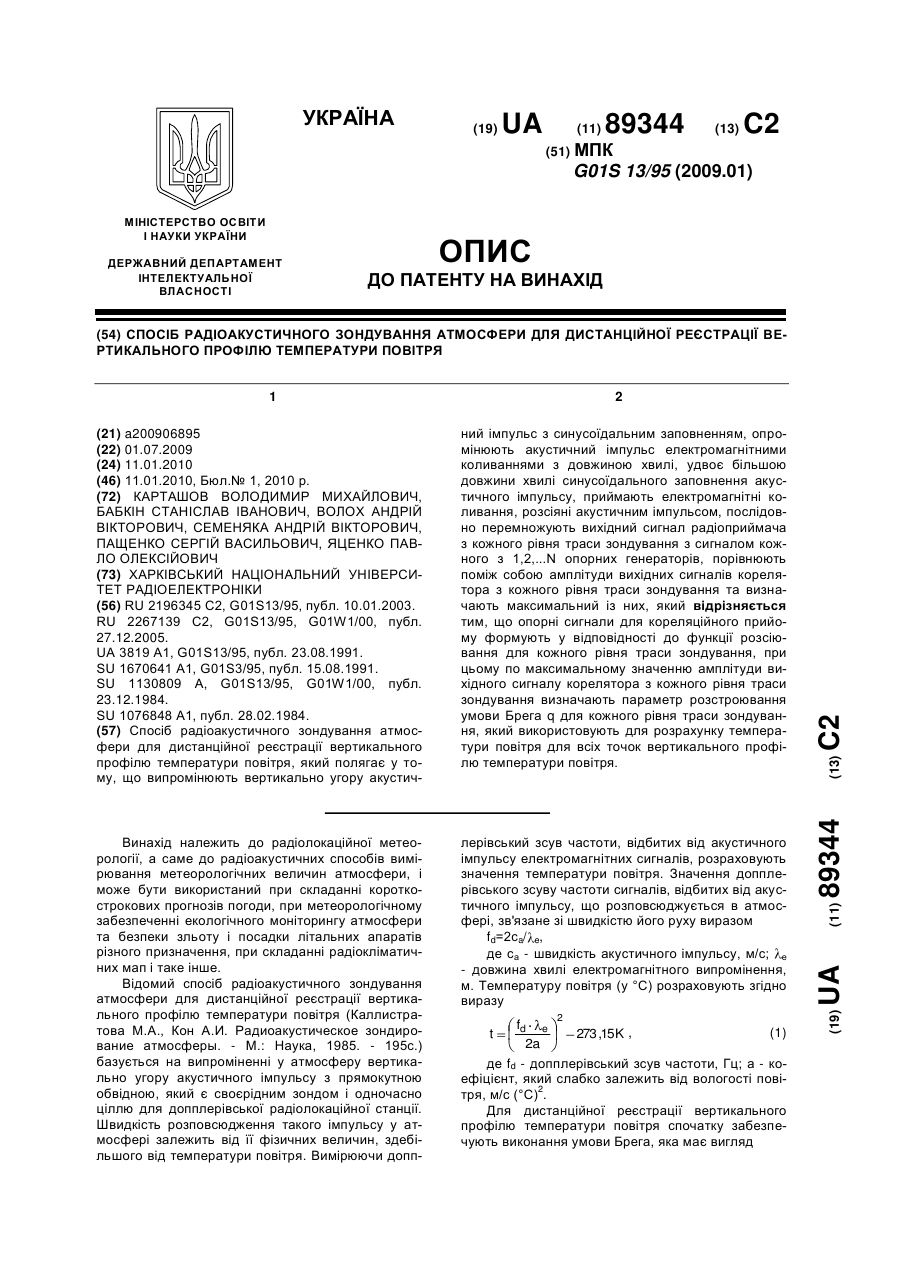
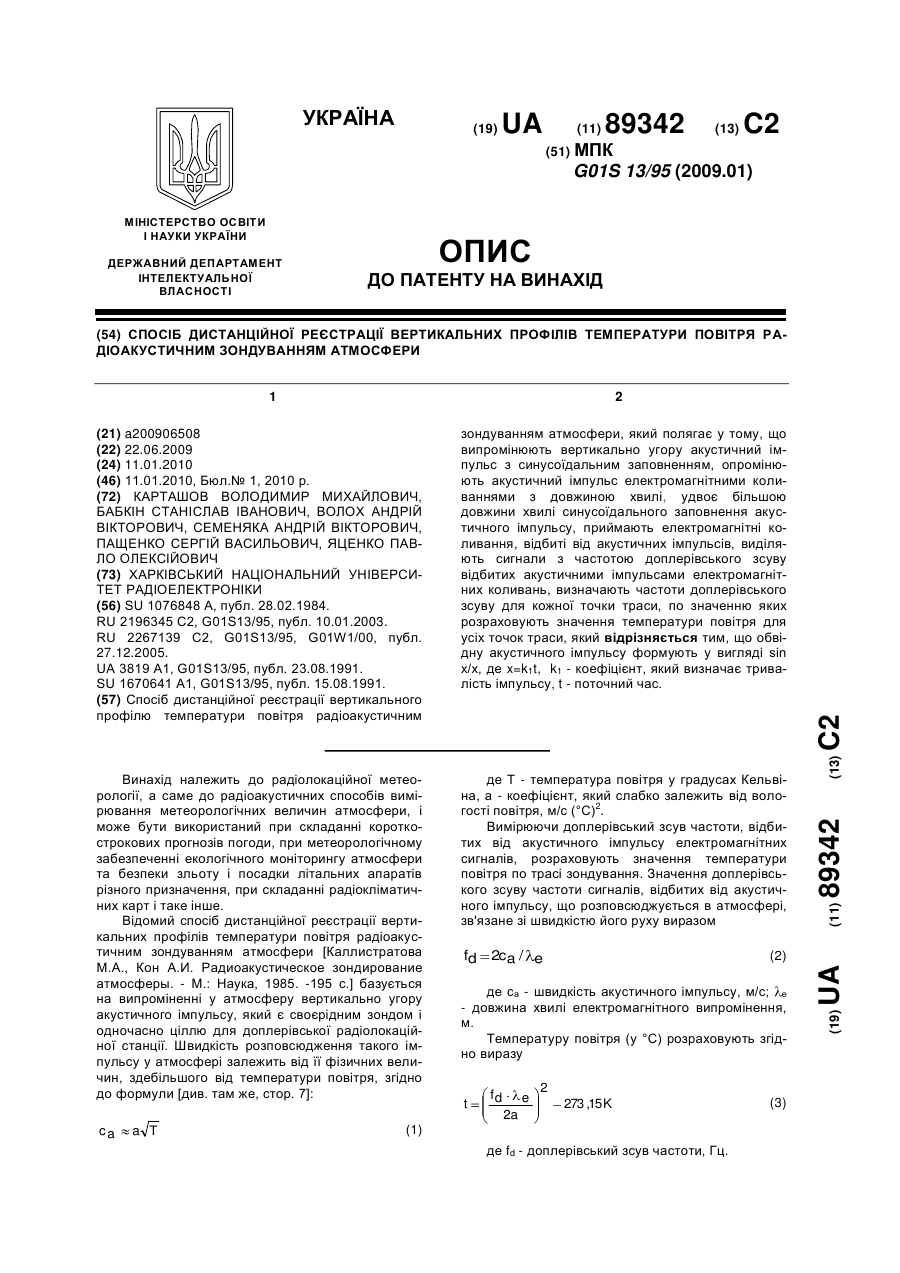
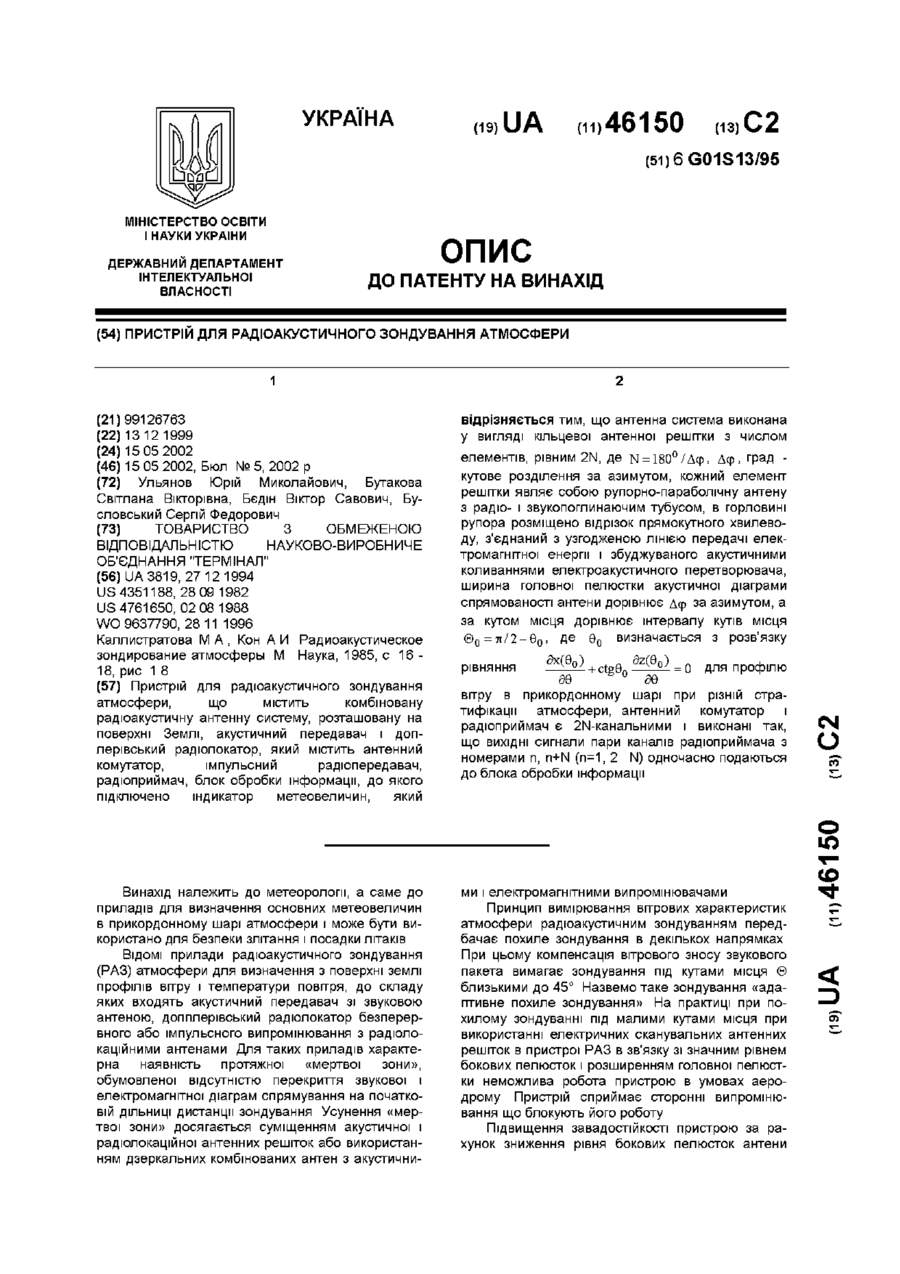
Реферат: Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури належить до радіолокаційної метеорології, а саме до радіоакустичних способів вимірювання параметрів атмосфери. Спосіб полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, піддають вихідний сигнал радіоприймача з кожного рівня траси зондування кореляційній обробці, використовуючи два одноканальних корелятори, опорні сигнали для кореляційного прийому формують у відповідності до функції розсіювання для кожного рівня траси зондування, вихідний сигнал кожного корелятора піддають корекції відповідно до функції E(q) = 2 F (r,q)dr, визначають параметр розстроювання умови Брегга q для кожного рівня траси зондування за різницею амплітуд сигналів кореляторів після корекції, UA 105052 C2 (12) UA 105052 C2 використовуючи значення параметра розстроювання умови Брегга q попереднього рівня траси зондування для визначення розстроювання умови Брегга q поточного рівня траси зондування, параметр q використовують для розрахунку температури повітря для кожної точки вертикального профілю температури. Використання значення параметра розстроювання умови Брегга q минулого рівня траси зондування для визначення розстроювання умови Брегга q поточного рівня траси зондування дозволяє використовувати два корелятори та формувати, відповідно, два опорних сигнали, що зменшує необхідну обчислювальну потужність обладнання, забезпечуючи достатньо високу точність реєстрації вертикального профілю температури радіоакустичним зондуванням без виконання умови Брегга по трасі зондування. UA 105052 C2 5 10 15 Винахід належить до радіолокаційної метеорології, а саме до радіоакустичних способів вимірювання параметрів атмосфери, і може бути використаний при проведенні передпроектних робіт та будівництві об'єктів вітроенергетики, при складанні короткострокових прогнозів погоди, при метеорологічному забезпеченні екологічного моніторингу атмосфери та безпеки зльоту і посадки літальних апаратів різного призначення, при складанні радіокліматичних мап і таке інше. Відомий спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря (Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы. - Μ.: Наука, 1985. - 195 с.) базується на випромінені у атмосферу вертикально угору акустичного імпульсу з прямокутною обвідною, який є своєрідним зондом і одночасно ціллю для допплерівської радіолокаційної станції. Швидкість розповсюдження такого імпульсу у атмосфері залежить від її фізичних величин, здебільшого від температури повітря. Вимірюючи допплерівський зсув частоти, відбитих від акустичного імпульсу електромагнітних сигналів, розраховують значення температури повітря. Значення допплерівського зсуву частоти сигналів, відбитих від акустичного імпульсу, що розповсюджується в атмосфері, зв'язане зі швидкістю його руху виразом fd 2ca / e, де са - швидкість акустичного імпульсу, м/с; e - довжина хвилі електромагнітного випроміненя, м. Температуру повітря (у°С) розраховують згідно виразу 2 f t d e 273,15 , 2a 20 25 30 35 40 45 50 (1) де fd - допплерівський зсув частоти, Гц; а - коефіцієнт, який слабко залежить від вологості 2 повітря, м/с(°С) . Для дистанційної реєстрації вертикального профілю температури повітря забезпечують виконання умови Брега, яка має вигляд (2) e 2 a 0, де λα - довжина хвилі акустичного імпульсу, посередині траси зондування (Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы. - Μ.: Наука, 1985. - С. 151). Для реєстрації вертикального профілю температури повітря вимірюють допплерівський зсув частоти електромагнітних сигналів, відбитих від акустичного імпульсу, який послідовно знаходиться на всіх рівнях траси зондування, і розраховують значення температури повітря на кожному рівні. Недоліком цього способу є недостатня точність вимірювання температури повітря у тих точках траси, де не виконується умова Брега (через природне існування вертикального градієнту температури у атмосфері) (Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы. - Μ.: Наука, 1985. - СП) та необхідність багатоканальної кореляційної обробки електромагнітних сигналів, відбитих від акустичного імпульсу. Найближчим за технічною сутністю до заявленого є спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури (Карташов В.М., Бабкін С.І., Пащенко СВ., Куля Д. М. Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури. Патент № 97612. Опубл. 27.02.2012. Бюл. № 4). У способі радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вихідний сигнал радіоприймача з кожного рівня траси зондування піддають багатоканальній кореляційній обробці, сигнал кожного каналу корелятора піддають корекції відповідно до функції E(q) = 2 F (r, q)dr, порівнюють поміж собою амплітуди вихідних сигналів корелятора після корекції з кожного рівня траси зондування та визначають максимальний із них, опорні сигнали для кореляційного прийому формують у відповідності до функції розсіювання для кожного рівня траси зондування, по максимальному значенню амплітуди вихідного сигналу корелятора після корекції з кожного рівня траси зондування визначають параметр розстроювання умови Брегга q e 2a для кожного рівня траси зондування, який використовують для розрахунку температури повітря для кожної точки вертикального профілю температури повітря. У такому випадку температура повітря може бути розрахована з використанням формули: 1 UA 105052 C2 2 2fa 273,15, ,0 C 2f 20 q Cs 5 10 15 20 (3) яка отримана з використанням формули (7) з роботи (Карташов В.М., Волох А.В., Родионова В.В. Тела неопределенности зондирующих сигналов систем радиоакустического зондирования атмосферы. - Радиотехника. Всеукр. межвед. науч.-техн. сборник. 2007. Вып. 150. С. 94-99.) Недоліком цього способу є необхідність багатоканальної кореляційної обробки сигналів, що приймаються з кожного рівня траси зондування, в результаті чого, для оцінки параметрів на кожному рівні траси зондування, необхідно формувати кількість опорних сигналів відповідно до кількості каналів. В основу винаходу способу радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури поставлена задача зменшити кількість опорних сигналів, які необхідно формувати для забезпечення кореляційної обробки, використовуючи значення оцінки параметра розстроювання умови Брегга q, визначеного для попереднього рівня траси зондування. Ця задача вирішена таким чином. У способі радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вихідний сигнал радіоприймача з кожного рівня траси зондування піддають кореляційній обробці, опорні сигнали для кореляційного прийому формують у відповідності до функції розсіювання для кожного рівня траси зондування, сигнал після кореляційної обробки піддають корекції відповідно до функції E(q) = F (r, q)dr, визначають параметр розстроювання умови Брега q для кожного рівня траси зондування, параметр q використовують для розрахунку температури повітря для кожної точки вертикального профілю температури, згідно винаходу для кореляційної обробки використовують два одноканальних корелятори та для кожного рівня траси зондування формують два опорних сигнали, форма яких визначається значенням q на попередньому рівні траси зондування, а для визначення параметра розстроювання умови Брегга q для кожного рівня траси зондування використовують різницю між амплітудами сигналів двох одноканальних кореляторів після корекції та значення параметра розстроювання умови Брегга q попереднього рівня траси зондування. На фіг. 1 зображено сигнал U(x/q) на виході багатоканального корелятора, якщо в атмосфері виконується умова Брегга. На фіг. 2 зображено принцип вибору параметрів q опорних сигналів. На фіг. 3 зображено різницю між амплітудами сигналів двох каналів кореляторів. На фіг. 4 подано структурну схему пристрою для реалізації пропонованого способу. Розглянемо більш докладно пропонований спосіб. У способі радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, та піддають N-канальній кореляційній обробці, де в якості опорних сигналів каналів корелятора використовується N сигналів сформованих згідно з функцією розсіювання, в результаті чого на виході багатоканального корелятора формується вихідний сигнал U(x/q), який є функцією правдоподібності для оцінюваного значення q, з формою типу показаного на фіг. 1, якщо в атмосфері, наприклад, виконується умова Брегга. Далі по максимальному значенню амплітуди вихідного сигналу корелятора з кожного рівня траси зондування визначають параметр розстроювання умови Брегга q e 2a для кожного рівня траси зондування, який використовують для розрахунку температури повітря для кожної точки вертикального профілю температури повітря. Для забезпечення багатоканального кореляційного прийому необхідно формувати відповідну кількості каналів корелятора кількість опорних сигналів, що потребує порівняно великої розрахункової потужності обладнання. 2 25 30 35 40 45 50 2 UA 105052 C2 5 Необхідну кількість кореляторів або каналів корелятора і, відповідно, необхідну кількість опорних сигналів можна зменшити до двох. Для цього в радіоакустичному зондуванні треба застосувати принципи слідкувального способу, що використовується в класичній радіолокації, та в якому використання значення оцінюваного параметра, визначеного на попередніх циклах спостереження дозволяє спростити оптимальну схему обробки сигналів, які приймаються (Фалькович С.Е., Хомяков Э.Η. Статистическая теория измерительных радиосистем. - М.: Радио и связь, 1981. - с.73). Алгоритм роботи слідкувальної системи відповідає рівнянню 0 0 xt ut, a a dt xt ut, a adt 0 10 15 (4) , де ut, a a та ut, a a - вісові функції (Дымова А.И., Альбац М.Е., Бонч-Бруевич A.M. Радиотехнические системы. Под ред. А.И. Дымовой. Учебник для вузов. М., "Сов. радио", 1975, с. 114). Розглянемо алгоритм роботи, який відповідає рівнянню (4), при радіоакустичному зондуванні. Відомо, що функція правдоподібності параметра q при радіоакустичному зондуванні має один виражений максимум (фіг. 1), тому, якщо максимум спостерігається, наприклад, при q=q0, то існують такі значення параметра q як q1=q0 - Δ та q2=q0+Δ при яких функція правдоподібності матиме однакове значення (фіг.2), тобто, якщо сигнал F(r, q0), що приймається з даного рівня траси зондування, характеризується значенням параметра q=q0, то кореляційні інтеграли сигналу, що приймається, і опорних сигналів, сформованих з параметрами q1 та q2 будуть рівні 20 між собою за значенням, тобто 0 0 Fr, q0 Fr, q1 dr Fr, q0 Fr, q2 dr , a різниця між ними буде Fr, q0 Fr, q1 dr Fr, q0 Fr, q2 dr 0 0 дорівнювати, відповідно, нулю 0 . Далі, приймаючи сигнал F(r, qm) з наступного рівня траси зондування, який характеризується, наприклад, параметром q=qm, кореляційні інтеграли сигналу, що приймається з наступного рівня траси зондування, і опорних сигналів, сформованих з параметрами q1 та q2, Fr, qm Fr, q1 dr Fr, qm Fr, q2 dr x 25 30 35 0 будуть відрізнятись на величину x (фіг. 3) 0 , яка залежить від того, на скільки параметр qm цього наступного рівня траси зондування відрізняється від параметра q0 на минулому рівні траси зондування, тобто x залежить від значення величини y=qm-q0 (фіг. 3), де у це різниця між параметрами q, якими характеризуються сигнали, прийняті з двох сусідніх рівнів траси радіоакустичного зондування. Тому, знаючи залежність х(у) та значення параметра q на даному рівні траси зондування, можна оцінити значення параметра q на наступному рівні траси зондування, для чого, визначивши величину х, необхідно вибрати відповідне значення у на залежності х(у) та розрахувати за формулою qm=q0+y, де q0 - це значення параметра q на даному рівні траси зондування, qm - це значення параметру q на наступному рівні траси зондування. Визначивши qm, необхідно визначити наступні значення параметрів q двох опорних сигналів Fr, qm Fr, q1m dr Fr, qm Fr, q2m dr 0 40 45 0 q1m та q2m, для яких вірне рівняння 0 та які використовуються для оцінки х на наступному рівні траси зондування, за формулами q1m=qm - Δ та q2m=qm + Δ. Таким чином, відбувається підстройка опорних сигналів, при обробці сигналу з кожного наступного рівня траси зондування, використовуючи значення q визначене для минулого рівня траси зондування, щоб оцінювати різницю між параметрами q сусідніх рівнів траси зондування. Виходячи з вище описаного, для визначення параметрів q на кожному наступному рівні траси зондування достатньо формувати два опорних сигнали з такими параметрами qa та qb, що відрізняються на 2Δ, щоб кореляційні інтеграли сигналу з попереднього рівня траси зондування та цих опорних сигналів були рівні між собою. 3 UA 105052 C2 При радіоакустичному зондуванні атмосфери існує залежність потужності сигналу, що приймається, від умови Брегга, яка описується виразом виду E(q) = F (r, q)dr, (Карташов В.Μ., Волох А.В., Родионова В.В., Тела неопределенности зондирующих сигналов систем радиоакустического зондирования атмосферы. - Радиотехника. Всеукр. межвед. науч.-техн. сборник. 2007. Вып.150. С. 94-99), тобто потужність сигналу, що приймається з заданого рівня траси зондування, може змінюватись від того, якою мірою на цьому рівні виконується умова Брегга. При радіоакустичному зондуванні, на одні входи двох кореляторів подається сигнал, який приймається з вибраного рівня траси зондування, і, одночасно, на інші входи подаються 2 5 сигнали генератора опорних сигналів, енергія яких визначається функцією E(q) = F (r, q)dr, . Тому вихідні напруги сигналів кореляторів будуть залежними не тільки від взаємної кореляції опорної напруги та сигналу, що приймається (що є вирішальним для прийняття позитивного рішення оптимального виявляча), а і від амплітуд вихідних сигналів генератора опорних сигналів, які мають відповідати функції розсіювання. У такому разі помилково визначиться різниця х, що призведе до виникнення похибки визначення q на кожному рівні траси зондування. Для запобігання виникненню похибки такого роду виключають вплив амплітуди вихідного сигналу генератора опорних сигналів на амплітуди вихідних сигналів кореляторів з кожного рівня траси зондування, піддаючи вихідний сигнал кожного корелятора корекції відповідно до 2 10 15 функції E(q) = F (r, q) dr. Таким чином, при радіоакустичному зондуванні атмосфери досягається не гірша від найближчого до заявленого способу точність реєстрації вертикального профілю температури повітря шляхом зниження впливу амплітуди вихідного сигналу кореляторів для кожного рівня траси зондування на точність оцінки значення параметра розстроювання умови Брегга q, а використання значення параметра розстроювання умови Брегга q поточного рівня траси зондування для визначення розстроювання умови Брегга q наступного рівня траси зондування дозволяє використовувати два корелятори та формувати, відповідно, два опорних сигнали, що зменшує необхідну обчислювальну потужність обладнання. Реалізація запропонованого способу здійснюється таким чином. Реєстрацію вертикального профілю температури повітря проводять за допомогою системи радіоакустичного зондування. При цьому вертикально угору випромінюють акустичний імпульс, який опромінюють електромагнітними коливаннями. Параметри акустичного імпульсу - частоту синусоїдального заповнення, тривалість та період повторення - формують за допомогою звукової карти персонального комп'ютера. Значення цих параметрів вибирають у такий спосіб, щоб умова Брегга виконувалась на першому рівні траси зондування, тобто щоб на першому рівні траси зондування q0=0, де q0 - розстройка умови Брегга на першому рівні траси зондування. Для цього датчиком температури повітря вимірюють приземну температуру повітря на рівні верхнього зрізу акустичної антени, далі розраховують швидкість звуку за формулою 2 20 25 30 35 40 45 c a 20 і довжину акустичної хвилі (див. вираз (2)), необхідної для виконання умови Брегга на цьому рівні для заданої довжини хвилі електромагнітного коливання системи радіоакустичного зондування, а розраховану довжину акустичної хвилі використовують для розрахунку найвищої звукової частоти синусоїдального заповнення акустичного імпульсу за формулою fa=ca/λa. Тому, що на першому рівні траси зондування температура виміряна датчиком температури, розсіяні від акустичного імпульсу, що знаходиться на другому рівні траси зондування, електромагнітні коливання приймають, підсилюють, надалі послідовно перемножують у кореляторах з опорними сигналами, сформованими з параметрами q1=q0 - Δ = Δ та q2=q0 + Δ = Δ, щоб оцінити наскільки відрізняється параметр q другого рівня траси зондування відносно параметра q0=0, яким характеризується перший рівень траси зондування. Вихідні сигнали кореляторів піддають корекції відповідно до функції E(q) = F (r, q)dr, та оцінюють різницю х між ними, оцінивши яку, визначають різницю у між значеннями параметрів q першого та другого рівнів траси зондування по залежності х(у), яка закладена в пам'ять комп'ютера та розраховують значення параметра q на другому рівні траси зондування за формулою qm=q0+y, де qm - розстройка умови Брегга на другому рівні траси зондування. Визначивши параметр q на другому рівні траси зондування, розраховують параметри q опорних сигналів, які використовують для кореляційної обробки сигналу, який приймається з третього рівня траси зондування, за формулами qm1=qm - Δ, qm2=qm + Δ, де qm1, qm2 - параметри опорних сигналів для кореляційної обробки сигналу з третього рівня траси зондування. Далі розсіяні від акустичного імпульсу, який досяг третього рівня траси зондування, електромагнітні коливання приймають, підсилюють, надалі послідовно перемножують у кореляторах з опорними 2 50 55 4 UA 105052 C2 сигналами, сформованими з параметрами qm1 та qm2, щоб оцінити наскільки відрізняється параметр q третього рівня траси зондування відносно параметра qm, яким характеризується другий рівень траси зондування. Вихідні сигнали кореляторів піддають корекції відповідно до функції E(q) = F (r, q)dr, та оцінюють різницю χ між ними, оцінивши яку, визначають різницю у між параметрами q другого та третього рівнів траси зондування по залежності х(у), яка закладена в пам'ять комп'ютера та розраховують параметр ч на третьому рівні траси зондування за формулою qν = qm + у, де qν - розстройка умови Брегга на третьому рівні траси зондування. Визначивши параметр q на третьому рівні траси зондування, розраховують параметри q опорних сигналів, що використовують для кореляційної обробки сигналу, що приймається з четвертого рівня траси зондування, за формулами qν1=qν - Δ, qν2=qν + Δ, де qνl, qν2 - параметри опорних сигналів для кореляційної обробки сигналу з четвертого рівня траси зондування. Значення q для всіх наступних рівнів траси зондування оцінюється аналогічним чином. Опорні сигнали формуються з використанням функції розсіювання, яка має вигляд 2 5 10 Fr, q 2r 'r S r 'e jq{r ' dr ' , 15 20 25 30 35 40 45 50 55 (5) де r - просторова розстройка (зміщення) сигналів; Е, S - комплексні обвідні коливань (Карташов В.М. Розвиток теорії та удосконалення систем радіоакустичного і акустичного зондування атмосфери. Автореферат дис. д-ра техн. наук - Харків, 2003.- С13-14.). Оцінки значення q всіх рівнів траси зондування використовують для розрахунку температури повітря для всіх точок вертикального профілю температури повітря. Оцінка параметра розстроювання умови Брегга q та розрахунки температури для всіх точок вертикального профілю температури повітря виконуються за командами, які формує персональний комп'ютер. Він же розраховує та задає параметри q для генераторів опорної напруги для кожного рівня траси зондування та при необхідності - кількість зондувань (тривалість часу необхідного усереднення одиничних профілів температури, що традиційно для вимірювань у метеорології) та термін виводу вертикального профілю на екран монітора або до зовнішніх засобів відображення метеорологічної інформації. Розглянемо пристрій для реалізації пропонованого способу. Структурна схема пристрою наведена на фіг.4. Пристрій містить радіопередавач 1, вихід якого з'єднаний зі входом антени радіопередавача 2, датчик температури повітря 3, вихід якого з'єднаний з першим входом персонального комп'ютера 4, передавач акустичний 5, вихід якого з'єднаний зі входом антени акустичної 6, вхід передавача акустичного 5 з'єднаний з першим виходом персонального комп'ютера 4, радіоприймач 8, перший вхід якого з'єднаний з виходом антени радіоприймача 7, а вихід радіоприймача 8 з'єднаний з першим входом корелятора 9 та першим входом корелятора 10, другий вхід корелятора 9 та другий вхід корелятора 10 з'єднані відповідно з першим та другим виходами генератора опорних сигналів 11, вихід корелятора 9 з'єднаний з першим входом пристрою віднімання 13, а вихід корелятора 10 з'єднаний з другим входом пристрою віднімання 13 третій та четвертий входи якого з'єднані відповідно з першим та другим виходами підсилювача модульованого 12, вихід пристрою віднімання 13 з'єднаний з другим входом комп'ютера 4, третій та четвертий виходи генератора опорних сигналів 11 з'єднані відповідно з першим та другим входами підсилювача модульованого 12, вхід генератора опорних сигналів з'єднаний з другим виходом персонального комп'ютера 4. Робота пристрою. Перед зондуванням у персональний комп'ютер 4, програма роботи якого має шість підпрограм: підпрограму зондування, підпрограму формування акустичного імпульсу, підпрограму розрахунку функції розсіювання, підпрограму визначення параметрів q опорних сигналів, підпрограму визначення q на рівнях траси зондування та підпрограму розрахунку температури, вводяться дані: про дату та час зондування, довжину електромагнітної хвилі системи радіоакустичного зондування, значення коефіцієнту а, тривалість та період повторення акустичного імпульсу, кількість рівнів вимірювання температури на трасі зондування М. Радіопередавач 1 формує вихідні неперервні коливання високої частоти з високою стабільністю та заданої потужності, які подаються на вхід антени радіопередавача 2, де перетворюються у електромагнітні коливання та випромінюються вертикально угору. Датчик температури повітря 3 вимірює значення температури на першому рівні траси зондування. Комп'ютер 4 по значенню температури, виміряної датчиком температури 3, розраховує значення звукової частоти синусоїдального заповнення акустичного імпульсу та за командою "Пуск", за допомогою звукової карти, генерує акустичний імпульс заданої тривалості та заданим періодом повторення, який подається на вхід передавача акустичного 5, у якому звукові коливання підсилюються до заданої потужності і з виходу якого подаються до входу антени акустичної 6, за допомогою якої електричні коливання звукової частоти перетворюються у потужні акустичні 5 UA 105052 C2 5 10 коливання, які випромінюються у напрямку зондування атмосфери. Розсіяні від акустичного імпульсу електромагнітні коливання антеною радіоприймача 7 перетворюються у електричні коливання, поступають на вхід радіоприймача 8, де підсилюються та одночасно подаються на корелятори 9 та 10, у яких сигнали з виходу радіоприймача 8 перемножуються в одному кореляторі з одним коливанням генератора опорних сигналів 11 та в другому кореляторі з другим коливанням генератора опорних сигналів 11, які генеруються останнім по командам персонального комп'ютера 4 згідно до функції розсіювання з параметрами q, що залежать від значення розстройки умови Брегга на рівні траси зондування, минулому відносно рівня, з якого на даний момент приймається сигнал. Одночасно два коливання генератора опорних сигналів 11 подаються на підсилювач модульований 12, який формує два вихідних сигнали згідно з функцією E(q) = F (r, q)dr, . Вихідні сигнали підсилювача модульованого 12 подаються на вхід пристрою віднімання 13, у якому віднімаються з вихідних сигналів корелятора 9 та корелятора 10, після чого пристрій віднімання 13 віднімає одне від одного результати попереднього віднімання з вихідних сигналів кореляторів 9 та 10 сигналів підсилювача модульованого 12 та подає різницю на другий вхід комп'ютера 4, за якою комп'ютер 4 визначає значення параметра розстроювання умови Брегга q на поточному рівні траси зондування. Комп'ютер 4 по значенням параметра розстроювання умови Брегга q для кожного з Μ рівнів траси зондування та технічних параметрів системи радіоакустичного зондування розраховує значення температури повітря для кожної точки вертикального профілю температури. По закінченню розрахунків температури повітря для всіх точок вертикального профілю температури повітря комп'ютер 4 генерує команду "Стоп" для системи радіоакустичного зондування і видає одиничний вертикальний профіль температури на монітор або на інший засіб відтворення метеорологічної інформації. Таким чином, при радіоакустичному зондуванні атмосфери, використання значення параметра розстроювання умови Брегга q поточного рівня траси зондування для визначення розстроювання умови Брегга q наступного рівня траси зондування дозволяє використовувати два корелятори та формувати, відповідно, два опорних сигнали, що зменшує необхідну обчислювальну потужність обладнання, а зниження впливу амплітуди вихідних сигналів генератора опорних сигналів на точність визначення параметра розстроювання умови Брегга q для кожного рівня траси зондування, дає можливість отримати достатньо високу точність реєстрації вертикального профілю температури повітря радіоакустичним зондуванням без виконання умови Брегга по трасі зондування. 2 15 20 25 30 ФОРМУЛА ВИНАХОДУ 35 40 Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, що полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, вихідний сигнал радіоприймача з кожного рівня траси зондування піддають кореляційній обробці, опорні сигнали для кореляційного прийому формують у відповідності до функції розсіювання для кожного рівня траси зондування, сигнал після кореляційної обробки піддають корекції відповідно до функції E(q) = 45 50 2 F (r,q)dr, визначають параметр розстроювання умови Брегга q для кожного рівня траси зондування, параметр q використовують для розрахунку температури повітря для кожної точки вертикального профілю температури, який відрізняється тим, що для кореляційної обробки для кожного рівня траси зондування формують два опорних сигнали, форма яких визначається значенням q на минулому рівні траси зондування, що дозволяє працювати в слідкувальному режимі, а для визначення параметра розстроювання умови Брегга q для кожного рівня траси зондування використовують різницю між амплітудами сигналів двох кореляторів після корекції та значення параметра розстроювання умови Брегга q попереднього рівня траси зондування. 6 UA 105052 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюKartashov Volodymyr Mykhailovych, Babkin Stanislav Ivanovych
Автори російськоюКарташов Владимир Михайлович, Бабкин Станислав Иванович
МПК / Мітки
МПК: G01S 13/95
Мітки: радіоакустичного, атмосфери, профілю, температури, вертикального, зондування, реєстрації, спосіб
Код посилання
<a href="https://ua.patents.su/9-105052-sposib-radioakustichnogo-zonduvannya-atmosferi-dlya-reehstraci-vertikalnogo-profilyu-temperaturi.html" target="_blank" rel="follow" title="База патентів України">Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури</a>
Спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря
Номер патенту: 89344
Опубліковано: 11.01.2010
Автори: Бабкін Станіслав Іванович, Пащенко Сергій Васильович, Волох Андрій Вікторович, Яценко Павло Олексійович, Семеняка Андрій Вікторович, Карташов Володимир Михайлович
МПК: G01S 13/95
Мітки: температури, радіоакустичного, профілю, повітря, реєстрації, зондування, спосіб, атмосфери, вертикального, дистанційно
Формула / Реферат:
Спосіб радіоакустичного зондування атмосфери для дистанційної реєстрації вертикального профілю температури повітря, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом,...
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури

Номер патенту: 97612
Опубліковано: 27.02.2012
Автори: Бабкін Станіслав Іванович, Куля Дмитро Миколайович, Пащенко Сергій Васильович, Карташов Володимир Михайлович
МПК: G01S 13/95
Мітки: радіоакустичного, профілю, температури, атмосфери, зондування, реєстрації, вертикального, спосіб
Формула / Реферат:
Спосіб радіоакустичного зондування атмосфери для реєстрації вертикального профілю температури, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, розсіяні акустичним імпульсом, послідовно перемножують...
Спосіб дистанційної реєстрації вертикальних профілів температури повітря радіоакустичним зондуванням атмосфери
Номер патенту: 89342
Опубліковано: 11.01.2010
Автори: Волох Андрій Вікторович, Пащенко Сергій Васильович, Карташов Володимир Михайлович, Семеняка Андрій Вікторович, Бабкін Станіслав Іванович, Яценко Павло Олексійович
МПК: G01S 13/95
Мітки: вертикальних, зондуванням, спосіб, повітря, дистанційно, радіоакустичним, температури, реєстрації, атмосфери, профілів
Формула / Реферат:
Спосіб дистанційної реєстрації вертикального профілю температури повітря радіоакустичним зондуванням атмосфери, який полягає у тому, що випромінюють вертикально угору акустичний імпульс з синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі, удвоє більшою довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичних імпульсів,...
Пристрій для радіоакустичного зондування атмосфери
Номер патенту: 46150
Опубліковано: 15.05.2002
Автори: Бусловський Сергій Федорович, Бутакова Світлана Вікторівна, Бєдін Віктор Савович, Ульянов Юрій Миколайович
МПК: G01S 13/95
Мітки: пристрій, зондування, радіоакустичного, атмосфери
Формула / Реферат:
Пристрій для радіоакустичного зондування атмосфери, що містить комбіновану радіоакустичну антенну систему, розташовану на поверхні Землі, акустичний передавач і доплерівський радіолокатор, який містить антенний комутатор, імпульсний радіопередавач, радіоприймач, блок обробки інформації, до якого підключено індикатор метеовеличин, який відрізняється тим, що антенна система виконана у вигляді кільцевої антенної решітки з числом елементів,...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01S 13/00
Мітки: температури, акустичного, дистанційного, зондування, повітря, вимірювання, змін, спосіб, допомогою, атмосфери, відносних
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Попередній патент: Спосіб визначення конструктивних параметрів композитних стінових панелей
Наступний патент: Азетидинонові сполуки і медичне застосування зазначених сполук
Випадковий патент: Спосіб діагностики розвитку атеросклерозу