Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі
Номер патенту: 107308
Опубліковано: 10.12.2014
Автори: Цяпа Володимир Богданович, Мацигін Андрій Богданович, Паранчук Ярослав Степанович
Формула / Реферат
Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі, який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази, який відрізняється тим, що додатково у кожний фазний канал регулювання введено нейрорегулятор, причому перший вхід нейрорегулятора під'єднаний до виходу блока формування сигналу керування, другий вхід нейрорегулятора з'єднаний з виходом механізму переміщення електрода, а вихід нейрорегулятора під'єднаний до входу силового підсилювача.
Текст
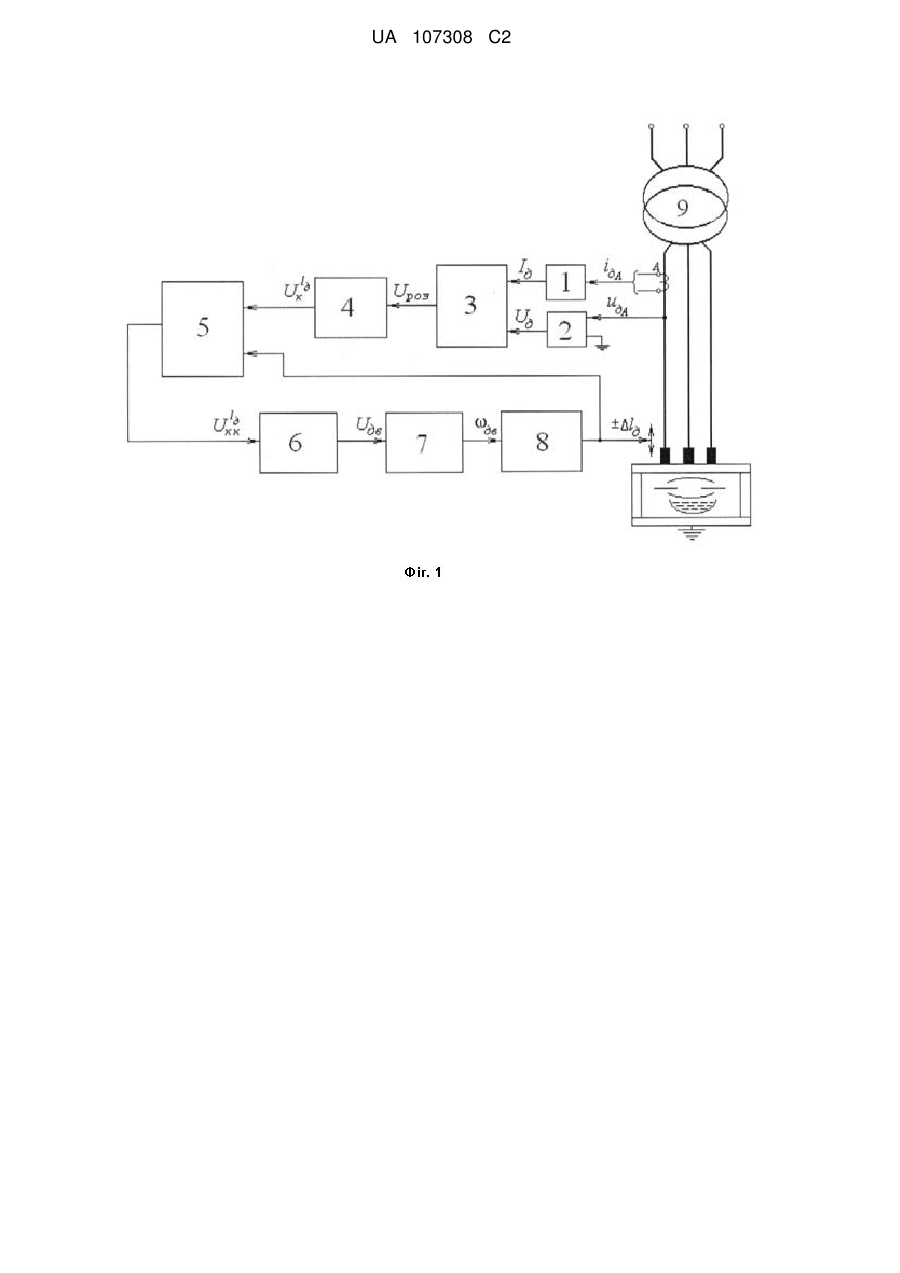
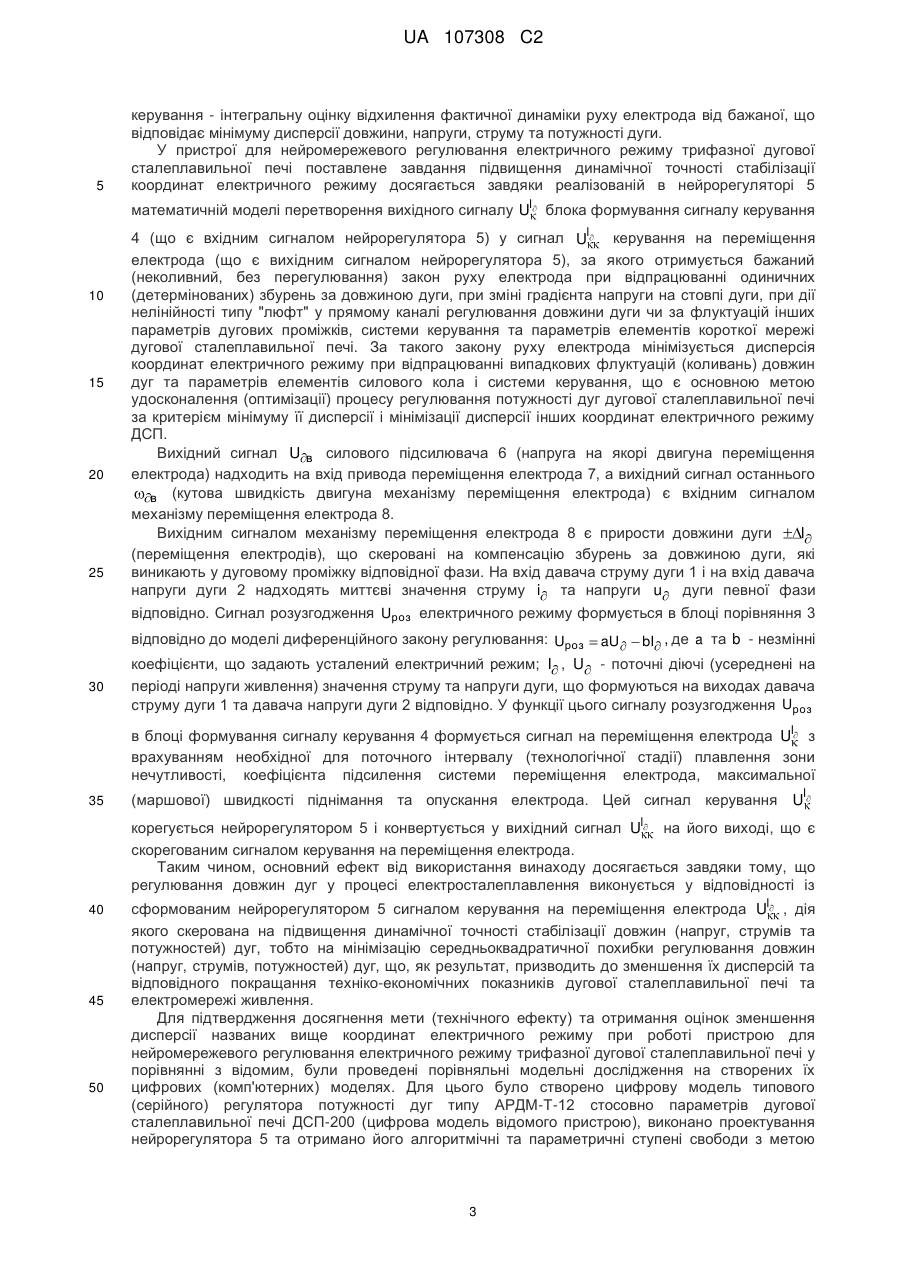
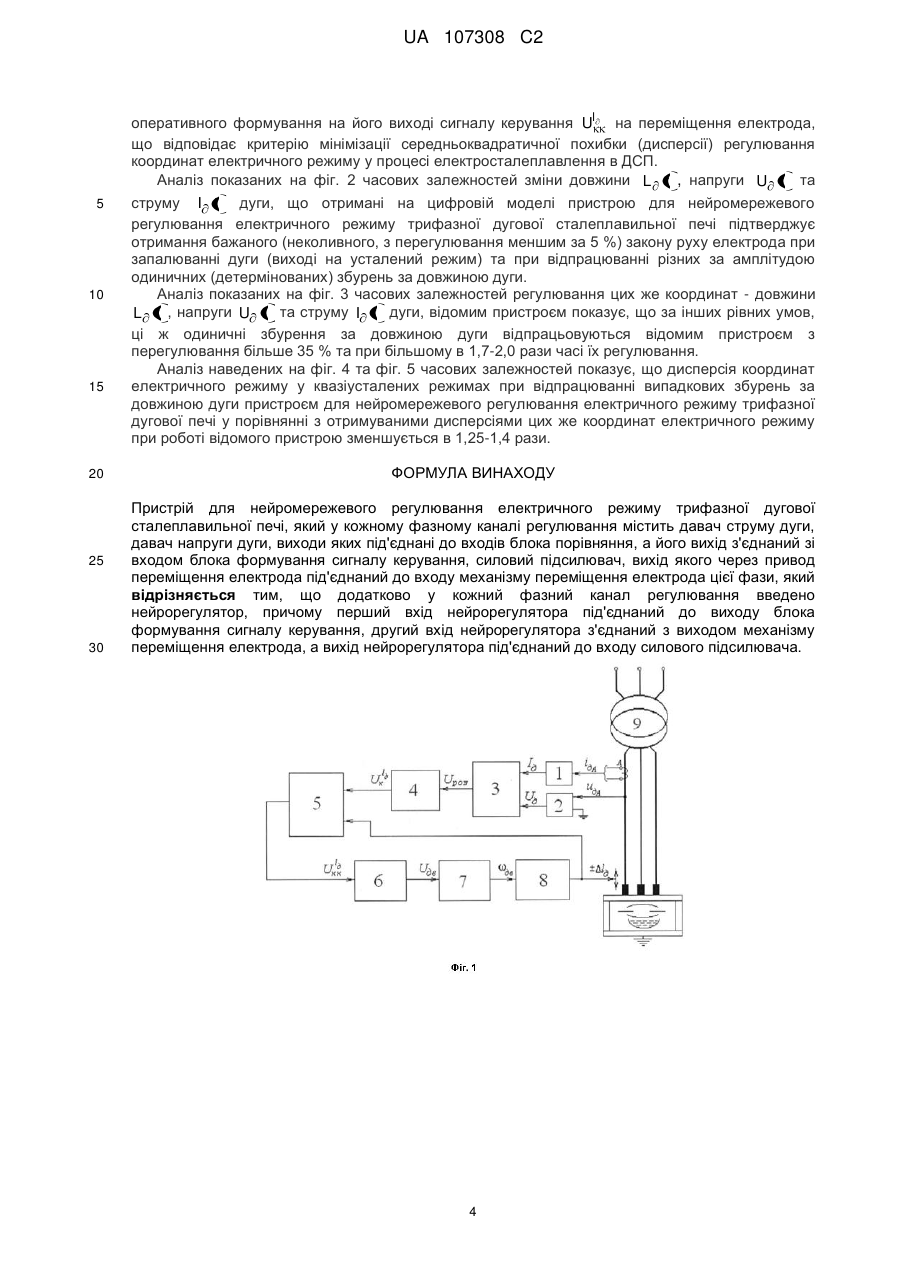
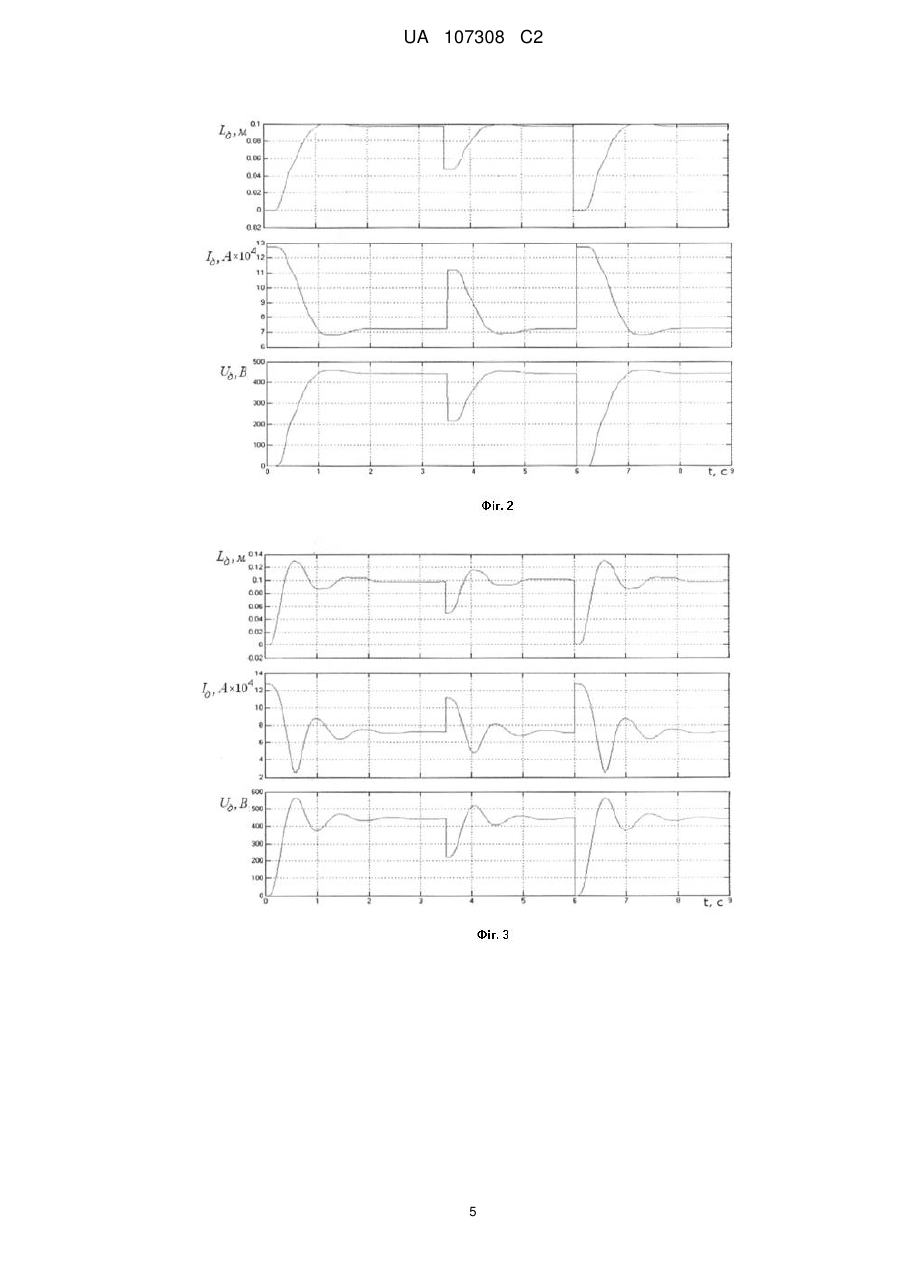
Реферат: Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі належить до електротехніки, зокрема до системи автоматичного регулювання електричного режиму дугових сталеплавильних печей трифазного струму. Пристрій містить у кожному фазному каналі регулювання давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази. Додатково він у кожному фазному каналі регулювання містить нейрорегулятор, перший вхід якого під'єднаний до виходу блока формування сигналу керування, другий його вхід з'єднаний з виходом механізму переміщення електрода, а вихід нейрорегулятора під'єднаний до входу силового підсилювача. Технічним результатом є: зменшено дисперсію напруг, струмів, потужностей дуг, реактивної потужності дугової сталеплавильної печі, поліпшено показники якості напруги електричної мережі у точці під'єднання дугової сталеплавильної печі, зокрема зменшено дозу флікера, підвищено потужність дуг, збільшено продуктивність дугової сталеплавильної печі, зменшено втрати потужності в елементах короткої мережі дугової сталеплавильної печі, зменшено питомі витрати електроенергії, зменшено реактивну потужність печі. UA 107308 C2 (12) UA 107308 C2 UA 107308 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до електротехніки, зокрема до систем автоматичного регулювання електричного режиму дугових сталеплавильних печей трифазного струму, і може бути використаний при проектуванні нових та модернізації існуючих системи регулювання електричного режиму (регуляторів потужності дуг) дугових сталеплавильних печей (ДСП) змінного струму. Найбільш близьким до пропонованого є пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі (Автоматическое управление электротермическими установками: Учебник для вузов / А.М. Кручинин, К.М. Махмудов, Ю.М. Миронов и др.; Под ред. A.Д. Свенчанского. - М.: Энергоатомиздат, 1990. - 416 с., с. 283), який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази. Однак при роботі цього пристрою спостерігається значна коливність процесів відпрацювання збурень за довжиною дуги, що спричинює значну дисперсію координат електричного режиму, а саме напруг, струмів і потужностей дуг, реактивної потужності ДСП на повному інтервалі плавлення. Це негативно впливає на показники електротехнологічної ефективності дугової сталеплавильної печі, зокрема це призводить до зниження потужності дуг, до зростання питомих витрат електроенергії, до збільшення потужності електричних втрат в елементах короткої мережі ДСП, до зростання реактивної потужності печі та зниження коефіцієнта потужності. Погіршуються при цьому також показники якості електроенергії у точці під'єднання дугової сталеплавильної печі до електричної мережі, зокрема зростає доза флікера. В основу винаходу поставлена задача створення пристрою для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі, у якому б завдяки введенню нового функціонального елемента реалізувався б неколивний (аперіодичний, без перерегулювання) процес відпрацювання одиничних (детермінованих) збурень за довжиною дуги. Це дасть змогу в умовах дії неперервних випадкових збурень за довжиною дуги та випадкових флуктуацій параметрів елементів силового кола печі і дугових проміжків підвищити динамічну точність регулювання (стабілізації) координат електричного режиму упродовж плавки і, на основі цього, поліпшити показники електротехнологічної ефективності дугової сталеплавильної печі та покращити показники електромагнітної сумісності режимів дугової сталеплавильної печі та електричної мережі живлення дугової печі. Поставлена задача вирішується тим, що пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі, який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази, згідно з винаходом додатково у кожному фазному каналі регулювання містить нейрорегулятор, причому перший вхід нейрорегулятора під'єднаний до виходу блока формування сигналу керування, другий вхід нейрорегулятора з'єднаний з виходом механізму переміщення електрода, а вихід нейрорегулятора під'єднаний до входу силового підсилювача. Завдяки тому, що у пристрої для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі реалізується неколивний (без перерегулювання, аперіодичний) процес відпрацювання одиничних збурень за довжиною дуги, то у процесі відпрацювання випадкових параметричних та координатних збурень, що виникають на всіх технологічних стадіях плавки у силовому електричному колі та дугових проміжках, підвищується динамічна точність регулювання (стабілізації) координат електричного режиму (зменшується їх дисперсія) і на основі цього комплексно поліпшуються показники електротехнологічної ефективності дугової сталеплавильної печі та показники електромагнітної сумісності режимів дугової сталеплавильної печі та електричної мережі, до якої вона підключена. На фіг. 1 представлено функціональну блок-схему пристрою для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі для одного фазного каналу регулювання, на фіг. 2 представлено процеси відпрацювання одиничних (детермінованих) збурень за довжиною дуги пристроєм для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі; на фіг. 3 представлено процеси відпрацювання одиничних (детермінованих) збурень за довжиною дуги відомим пристроєм для регулювання електричного режиму дугової трифазної сталеплавильної печі, на фіг. 4 представлено процеси відпрацювання випадкових збурень за довжиною дуги пристроєм для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі, 1 UA 107308 C2 5 на фіг. 5 представлено процеси відпрацювання випадкових збурень за довжиною дуги відомим пристроєм для регулювання електричного режиму трифазної дугової сталеплавильної печі, де на фіг. 1 позначено: 1 - давач струму дуги, 2 - давач напруги дуги, 3 - блок порівняння; 4 - блок формування сигналу керування, 5 - нейрорегулятор; 6 - силовий підсилювач; 7 - привід переміщення електрода, 8 - механізм переміщення електрода, на фіг. 1 також позначено: 9 пічний трансформатор, u A та i A - сигнали зміни миттєвих значень напруги та струму дуги фази А відповідно, U та I - процеси зміни усереднених на періоді напруги мережі живлення значень напруги та струму дуги фази А відповідно, Uроз - сигнал розузгодження електричного режиму, Ul 10 сигнал керування на переміщення електрода, Ul - скорегований сигнал керування на переміщення електрода, що формується нейрорегулягором 5, U в - вихідний сигнал силового підсилювача 6, l - вихідний в - вихідний сигнал приводу переміщення електрода 7, сигнал механізму переміщення електрода 8, що є приростами довжини дуги, які скеровані на компенсацію збурень (відхилень) довжини дуги від заданого значення, на фіг. 2 - фіг. 5 позначено: Lзб t - процес зміни випадкових збурень за довжиною дуг; L t - процес зміни 15 20 25 30 35 40 45 50 55 довжини дуги; U t та I t - процеси зміни усереднених на періоді напруги мережі живлення значень напруги та струму дуги відповідно. Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі у кожному фазному каналі регулювання містить давач струму дуги 1, давач напруги дуги 2, виходи яких під'єднані до входів блока порівняння 3, вихід якого сполучений зі входом блока формування сигналу керування 4, вихід якого сполучений з першим входом нейрорегулятора 5, вихід нейрорегулятора 5 через силовий підсилювач 6 та привід переміщення електрода 7 сполучений зі входом механізму переміщення електрода 8, а вихід механізму переміщення електрода 8 сполучений з другим входом нейрорегулятора 5 і механічно з'єднаний з електродом даної фази, спричинюючи його переміщення у напрямі компенсації збурення за довжиною дуги, до електрода під'єднаний вивід вторинної обмотки цієї фази пічного трансформатора 9. Особливістю силового електричного кола живлення трифазних дуг дугової сталеплавильної печі є відсутність нульового провідника, що є причиною тісної пофазної взаємозв'язаності режимів навантаження, нелінійність і непостійність параметрів елементів силового кола і електричних дуг, наявність суттєвих нелінійностей, люфтів та зон нечутливості в системі автоматичного регулювання положення електродів (регулювання потужності дуг), пофазна несиметрія напруг живлення дугової печі тощо. Ці фактори та особливості унеможливлюють отримання точних математичних моделей силового електричного кола дугової сталеплавильної печі та системи автоматичного регулювання, що є необхідним для проектування системи регулювання положення електродів з оптимальною динамікою упродовж всієї плавки на основі методів класичної теорії автоматичного управління. Тому у пристрої для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі з метою реалізації оптимального (неколивного, без перерегулювання) та інваріантного до параметричних та координатних збурень, що виникають у силовому колі (об'єкті керування) та системі керування, закону руху електрода запропоновано використати методи теорії нейронних мереж, які не потребують точного математичного опису (точної математичної моделі) об'єкта керування. Для практичного втілення такого підходу у пристрої для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі скорегований сигнал керування на переміщення електрода формується нейрорегулятором 5, що представляється, наприклад, типовим нейрорегулятором NN Predictive Controller, модель (алгоритм) роботи якого реалізується на спеціалізованих цифрових чи універсальних мікропроцесорних пристроях. Об'єктом керування для нейрорегулятора 5 є силовий підсилювач 6, привід переміщення електрода 7 та механізм переміщення електрода 8. Модель цього об'єкта керування реалізується в нейрорегулягорі 5 на основі нейронної мережі. Ідентифікація моделі об'єкта керування проводиться в автономному режимі на основі стандартної методики. У процесі навчання параметри нейронної мережі змінюються у напрямі мінімізації похибки між вихідним сигналом - виходом механізму переміщення електрода 8, та вихідним сигналом нейронної мережі нейрорегулятора 5 на множині навчальних (пробних) сигналів керування. Як варіант, в нейрорегуляторі 5 використана штучна нейронна мережа з прямою передачею сигналу, що характеризується наявністю зв'язків між нейронами тільки в прямому напрямі без зворотних зв'язків усередині нейронної мережі. У процесі роботи нейрорегулятор 5 на своєму виході формує скорегований сигнал керування на переміщення електрода, що мінімізує критерій якості 2 UA 107308 C2 5 керування - інтегральну оцінку відхилення фактичної динаміки руху електрода від бажаної, що відповідає мінімуму дисперсії довжини, напруги, струму та потужності дуги. У пристрої для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі поставлене завдання підвищення динамічної точності стабілізації координат електричного режиму досягається завдяки реалізованій в нейрорегуляторі 5 математичній моделі перетворення вихідного сигналу Ul блока формування сигналу керування 10 15 20 25 4 (що є вхідним сигналом нейрорегулятора 5) у сигнал Ul керування на переміщення електрода (що є вихідним сигналом нейрорегулятора 5), за якого отримується бажаний (неколивний, без перегулювання) закон руху електрода при відпрацюванні одиничних (детермінованих) збурень за довжиною дуги, при зміні градієнта напруги на стовпі дуги, при дії нелінійності типу "люфт" у прямому каналі регулювання довжини дуги чи за флуктуацій інших параметрів дугових проміжків, системи керування та параметрів елементів короткої мережі дугової сталеплавильної печі. За такого закону руху електрода мінімізується дисперсія координат електричного режиму при відпрацюванні випадкових флуктуацій (коливань) довжин дуг та параметрів елементів силового кола і системи керування, що є основною метою удосконалення (оптимізації) процесу регулювання потужності дуг дугової сталеплавильної печі за критерієм мінімуму її дисперсії і мінімізації дисперсії інших координат електричного режиму ДСП. Вихідний сигнал U в силового підсилювача 6 (напруга на якорі двигуна переміщення електрода) надходить на вхід привода переміщення електрода 7, а вихідний сигнал останнього в (кутова швидкість двигуна механізму переміщення електрода) є вхідним сигналом механізму переміщення електрода 8. Вихідним сигналом механізму переміщення електрода 8 є прирости довжини дуги l (переміщення електродів), що скеровані на компенсацію збурень за довжиною дуги, які виникають у дуговому проміжку відповідної фази. На вхід давача струму дуги 1 і на вхід давача напруги дуги 2 надходять миттєві значення струму i та напруги u дуги певної фази відповідно. Сигнал розузгодження Uроз електричного режиму формується в блоці порівняння 3 відповідно до моделі диференційного закону регулювання: Uроз 30 aU bI , де a та b - незмінні коефіцієнти, що задають усталений електричний режим; I , U - поточні діючі (усереднені на періоді напруги живлення) значення струму та напруги дуги, що формуються на виходах давача струму дуги 1 та давача напруги дуги 2 відповідно. У функції цього сигналу розузгодження Uроз в блоці формування сигналу керування 4 формується сигнал на переміщення електрода Ul з врахуванням необхідної для поточного інтервалу (технологічної стадії) плавлення зони нечутливості, коефіцієнта підсилення системи переміщення електрода, максимальної 35 (маршової) швидкості піднімання та опускання електрода. Цей сигнал керування Ul корегується нейрорегулятором 5 і конвертується у вихідний сигнал Ul на його виході, що є скорегованим сигналом керування на переміщення електрода. Таким чином, основний ефект від використання винаходу досягається завдяки тому, що регулювання довжин дуг у процесі електросталеплавлення виконується у відповідності із 40 45 50 сформованим нейрорегулятором 5 сигналом керування на переміщення електрода Ul , дія якого скерована на підвищення динамічної точності стабілізації довжин (напруг, струмів та потужностей) дуг, тобто на мінімізацію середньоквадратичної похибки регулювання довжин (напруг, струмів, потужностей) дуг, що, як результат, призводить до зменшення їх дисперсій та відповідного покращання техніко-економічних показників дугової сталеплавильної печі та електромережі живлення. Для підтвердження досягнення мети (технічного ефекту) та отримання оцінок зменшення дисперсії названих вище координат електричного режиму при роботі пристрою для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі у порівнянні з відомим, були проведені порівняльні модельні дослідження на створених їх цифрових (комп'ютерних) моделях. Для цього було створено цифрову модель типового (серійного) регулятора потужності дуг типу АРДМ-Т-12 стосовно параметрів дугової сталеплавильної печі ДСП-200 (цифрова модель відомого пристрою), виконано проектування нейрорегулятора 5 та отримано його алгоритмічні та параметричні ступені свободи з метою 3 UA 107308 C2 5 10 15 20 25 30 оперативного формування на його виході сигналу керування Ul на переміщення електрода, що відповідає критерію мінімізації середньоквадратичної похибки (дисперсії) регулювання координат електричного режиму у процесі електросталеплавлення в ДСП. Аналіз показаних на фіг. 2 часових залежностей зміни довжини L t , напруги U t та струму I t дуги, що отримані на цифровій моделі пристрою для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі підтверджує отримання бажаного (неколивного, з перегулювання меншим за 5 %) закону руху електрода при запалюванні дуги (виході на усталений режим) та при відпрацюванні різних за амплітудою одиничних (детермінованих) збурень за довжиною дуги. Аналіз показаних на фіг. 3 часових залежностей регулювання цих же координат - довжини L t , напруги U t та струму I t дуги, відомим пристроєм показує, що за інших рівних умов, ці ж одиничні збурення за довжиною дуги відпрацьовуються відомим пристроєм з перегулювання більше 35 % та при більшому в 1,7-2,0 рази часі їх регулювання. Аналіз наведених на фіг. 4 та фіг. 5 часових залежностей показує, що дисперсія координат електричного режиму у квазіусталених режимах при відпрацюванні випадкових збурень за довжиною дуги пристроєм для нейромережевого регулювання електричного режиму трифазної дугової печі у порівнянні з отримуваними дисперсіями цих же координат електричного режиму при роботі відомого пристрою зменшується в 1,25-1,4 рази. ФОРМУЛА ВИНАХОДУ Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі, який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази, який відрізняється тим, що додатково у кожний фазний канал регулювання введено нейрорегулятор, причому перший вхід нейрорегулятора під'єднаний до виходу блока формування сигналу керування, другий вхід нейрорегулятора з'єднаний з виходом механізму переміщення електрода, а вихід нейрорегулятора під'єднаний до входу силового підсилювача. 4 UA 107308 C2 5 UA 107308 C2 6 UA 107308 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюParanchuk Yaroslav Stepanovych
Автори російськоюПаранчук Ярослав Степанович
МПК / Мітки
МПК: H05B 7/148
Мітки: нейромережевого, сталеплавильної, регулювання, електричного, пристрій, трифазної, режиму, дугової, печі
Код посилання
<a href="https://ua.patents.su/9-107308-pristrijj-dlya-nejjromerezhevogo-regulyuvannya-elektrichnogo-rezhimu-trifazno-dugovo-staleplavilno-pechi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для нейромережевого регулювання електричного режиму трифазної дугової сталеплавильної печі</a>
Пристрій для автоматичного регулювання електричного режиму трифазної дугової сталеплавильної печі
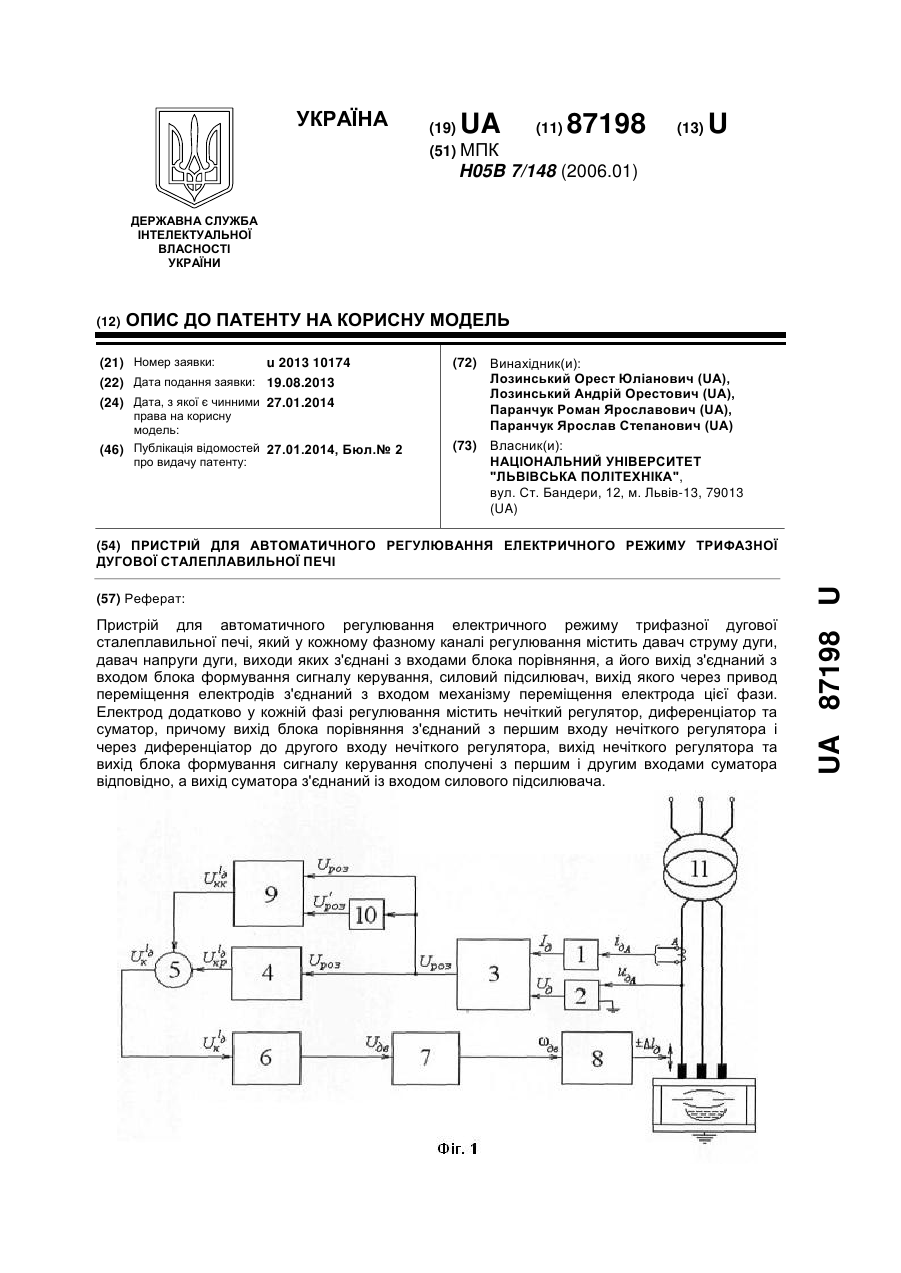
Номер патенту: 87198
Опубліковано: 27.01.2014
Автори: Паранчук Роман Ярославович, Лозинський Орест Юліанович, Паранчук Ярослав Степанович, Лозинський Андрій Орестович
МПК: H05B 7/148
Мітки: електричного, режиму, регулювання, автоматичного, пристрій, трифазної, сталеплавильної, дугової, печі
Формула / Реферат:
Пристрій для автоматичного регулювання електричного режиму трифазної дугової сталеплавильної печі, який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких з'єднані з входами блока порівняння, а його вихід з'єднаний з входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електродів з'єднаний з входом механізму переміщення електрода цієї фази, який...
Пристрій для нечіткого регулювання електричного режиму трифазної дугової сталеплавильної печі
Номер патенту: 91063
Опубліковано: 25.06.2014
Автори: Лозинський Орест Юліанович, Лозинський Андрій Орестович, Паранчук Роман Ярославович, Паранчук Ярослав Степанович
МПК: H05B 7/148
Мітки: пристрій, сталеплавильної, печі, трифазної, електричного, регулювання, дугової, нечіткого, режиму
Формула / Реферат:
Пристрій для нечіткого регулювання електричного режиму трифазної дугової сталеплавильної печі, який у кожному фазному каналі регулювання містить давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока порівняння, а його вихід з'єднаний зі входом блока формування сигналу керування, силовий підсилювач, вихід якого через привод переміщення електрода під'єднаний до входу механізму переміщення електрода цієї фази, який...
Пристрій для регулювання електричного режиму дугової трифазної електропечі
Номер патенту: 67201
Опубліковано: 15.06.2004
Автори: Паранчук Ярослав Степанович, Лозинський Орест Юліанович, Олексюк Володимир Аксентійович
МПК: H05B 7/148
Мітки: регулювання, електропечі, дугової, електричного, режиму, пристрій, трифазної
Формула / Реферат:
Пристрій для регулювання електричного режиму дугової трифазної електропечі, що містить у колі регулювання кожної фази давач струму дуги, давач напруги дуги, виходи яких під'єднані до входів блока формування сигналу керування, вихід якого через підсилювач сполучений із входом механізму переміщення електрода, регулятор режимної координати, перший вхід якого сполучений з виходом задавача режимної координати, а вихід під'єднаний до входу блока...
Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі та пристрій для його реалізації
Номер патенту: 61549
Опубліковано: 17.11.2003
Автор: Циганаш Віктор Євграфович
МПК: G05F 1/00
Мітки: пристрій, дугової, автоматичного, електричного, сталеплавильної, регулювання, реалізації, режиму, спосіб, печі
Формула / Реферат:
1. Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі, згідно з яким вимірюють струми та напруги дуг печі, перетворюють їх у сигнали, пропорційні вимірюваним параметрам, і подають сигнали на модель силового контуру печі, після чого вимірюють на моделі сигнали, порівнюють їх із заданими та при наявності неузгодженостей змінюють довжини дуг до усунення неузгодженостей, який відрізняється тим, що сигнали,...
Пристрій для автоматичного регулювання електричного режиму трифазної дугової електропечі
Номер патенту: 6810
Опубліковано: 29.12.1994
Автори: Ізаак Корнєй Іванович, Бабічев Алєксєй Константіновіч, Паранчук Ярослав Степанович, Сметанюк Ярослав Богданович, Лозинський Орест Юліанович, Костинюк Лев Дмитрович, Марущак Ярослав Юрієвич
МПК: H05B 7/148
Мітки: регулювання, режиму, електропечі, автоматичного, трифазної, електричного, дугової, пристрій
Формула / Реферат:
(57) Устройство для автоматического регулирования электрического режима трехфазной дуговой электропечи, содержащее в цепи управления каждой фазы датчик эффективного значения тока, блок задания уставки тока, датчик эффективного значения фазного напряжения и датчик эффективного значения напряжения дуги, блок сравнения, первый вход которого соединен с выходом датчика эффективного значения напряжения дуги, а выход соединен с задатчиком мощности...
Попередній патент: Генератор імпульсів тиску
Наступний патент: Спосіб ліквідації флатера бурового інструменту верстатів шарошкового буріння
Випадковий патент: Система опалення приміщень