Спосіб кореляційно-фазової пеленгації з подовженою характеристикою та пристрій для його здійснення
Номер патенту: 107505
Опубліковано: 12.01.2015
Автори: Харченко Володимир Петрович, Сорочан Анатолій Григорович

Формула / Реферат
1. Спосіб кореляційно-фазової пеленгації з подовженою характеристикою, згідно з яким кутове положення цілі визначається по відбитому сигналу, який модульований за кутом, однотональним гармонійним коливанням, при його проходженні роздільними каналами розповсюдження включає: по першому каналу - розгалуження сигналу на дві рівні частини, одна з яких затримується на сталу часу ![]() , друга відноситься по частоті до частоти гетеродина
, друга відноситься по частоті до частоти гетеродина ![]() та отримує затримку в часі на сталу часу
та отримує затримку в часі на сталу часу ![]() , одержані сигнали перемножують, з результату перемноження на частоті
, одержані сигнали перемножують, з результату перемноження на частоті ![]() отримують сигнал
отримують сигнал ![]() , по другому каналу - сигнал затримують на сталу часу
, по другому каналу - сигнал затримують на сталу часу ![]() , після чого перемножують з сигналом, затриманим на сталу часу
, після чого перемножують з сигналом, затриманим на сталу часу ![]() , з результату перемноження на частоті
, з результату перемноження на частоті ![]() отримують сигнал
отримують сигнал ![]() , з сигналів
, з сигналів ![]() і
і ![]() виділяють спектральні складові
виділяють спектральні складові ![]() і
і ![]() , розташовані на частотах
, розташовані на частотах ![]() , сигнал
, сигнал ![]() затримують на сталу часу
затримують на сталу часу ![]() , отримують сигнал
, отримують сигнал ![]() , який відрізняється тим, що з сигналу
, який відрізняється тим, що з сигналу ![]() виділяють спектральну складову
виділяють спектральну складову ![]() , розташовану на частоті
, розташовану на частоті ![]() , та ділять на дві рівні частини, одну частину перемножують з спектральною складовою
, та ділять на дві рівні частини, одну частину перемножують з спектральною складовою ![]() , розташованою на частоті
, розташованою на частоті ![]() , отримують сигнал
, отримують сигнал ![]() з частотою
з частотою ![]() , другу частину перемножують з сигналом
, другу частину перемножують з сигналом ![]() , отримують сигнал
, отримують сигнал ![]() з частотою
з частотою ![]() , сигнали
, сигнали ![]() і
і ![]() перемножують з опорним коливанням
перемножують з опорним коливанням ![]() , отриманим помноженням частоти гетеродина
, отриманим помноженням частоти гетеродина ![]() на два і затримкою на сталу часу
на два і затримкою на сталу часу ![]() , з результату множення з сигналу
, з результату множення з сигналу ![]() отримують постійну напругу
отримують постійну напругу ![]() , яка пропорційна квадрату амплітуди сигналу
, яка пропорційна квадрату амплітуди сигналу ![]() , з сигналу
, з сигналу ![]() формують ортогональну пару гармонійних коливань
формують ортогональну пару гармонійних коливань ![]() і
і ![]() , які перемножують з сигналом
, які перемножують з сигналом ![]() , з результату перемноження виділяють низькочастотні складові
, з результату перемноження виділяють низькочастотні складові ![]() і
і ![]() , які є проекціями сигналу
, які є проекціями сигналу ![]() на ортогональні складові
на ортогональні складові ![]() і
і ![]() , отримані складові
, отримані складові ![]() і
і ![]() підносять до квадрата, підсумовують, після чого беруть корінь квадратний, в результаті отримують напругу
підносять до квадрата, підсумовують, після чого беруть корінь квадратний, в результаті отримують напругу ![]() , яка є амплітудою сигналу
, яка є амплітудою сигналу ![]() , відносний рівень
, відносний рівень ![]() , тобто
, тобто ![]() , і її знак (плюс або мінус), що отримують зі складової
, і її знак (плюс або мінус), що отримують зі складової ![]() , однозначно визначають в деякий момент часу
, однозначно визначають в деякий момент часу ![]() кутове положення цілі
кутове положення цілі ![]() .
.
2. Пристрій кореляційно-фазової пеленгації з подовженою характеристикою, який містить змішувач, вхід якого є першим входом пристрою, другий вхід якого з'єднаний з гетеродином, а вихід через послідовно з'єднані смуговий фільтр, перший вхід другого перемножувача, третій вузькосмуговий смуговий фільтр з'єднаний з першим входом четвертого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через другу лінію затримки, перша лінія затримки, вхід якої є другим входом пристрою, з'єднана через послідовно з'єднані перший вхід першого перемножувача, другий вузькосмуговий смуговий фільтр і четверту лінію затримки з другим входом четвертого перемножувача, вихід смугового фільтра з'єднаний з другим входом першого перемножувача, який відрізняється тим, що в нього введені помножувач частоти на два, третя лінія затримки, перший вузькосмуговий смуговий фільтр, третій перемножувач, четвертий і п'ятий вузькосмугові смугові фільтри, п'ятий перемножувач, пристрій визначення амплітуди сигналу і пристрій визначення кутового положення цілі, причому вихід другого перемножувача з'єднаний з першим входом пристрою визначення кутового положення цілі через послідовно з'єднані перший вузькосмуговий смуговий фільтр, перший вхід третього перемножувача, другий вхід якого з'єднаний з виходом третього вузькосмугового смугового фільтра, четвертий вузькосмуговий смуговий фільтр і через перший вхід п'ятого перемножувача, другий вхід якого з'єднаний з опорним генератором через послідовно з'єднані помножувач частоти на два і третю лінію затримки, вихід третій лінії затримки також з'єднаний з першим входом пристрою визначення амплітуди сигналу, вихід четвертого перемножувача через п'ятий вузькосмуговий смуговий фільтр з'єднаний з другим входом пристрою визначення амплітуди сигналу, перший і другий виходи якого з'єднані з відповідно другим і третім входами пристрою визначення кутового положення цілі, вихід якого є виходом пристрою.
Текст
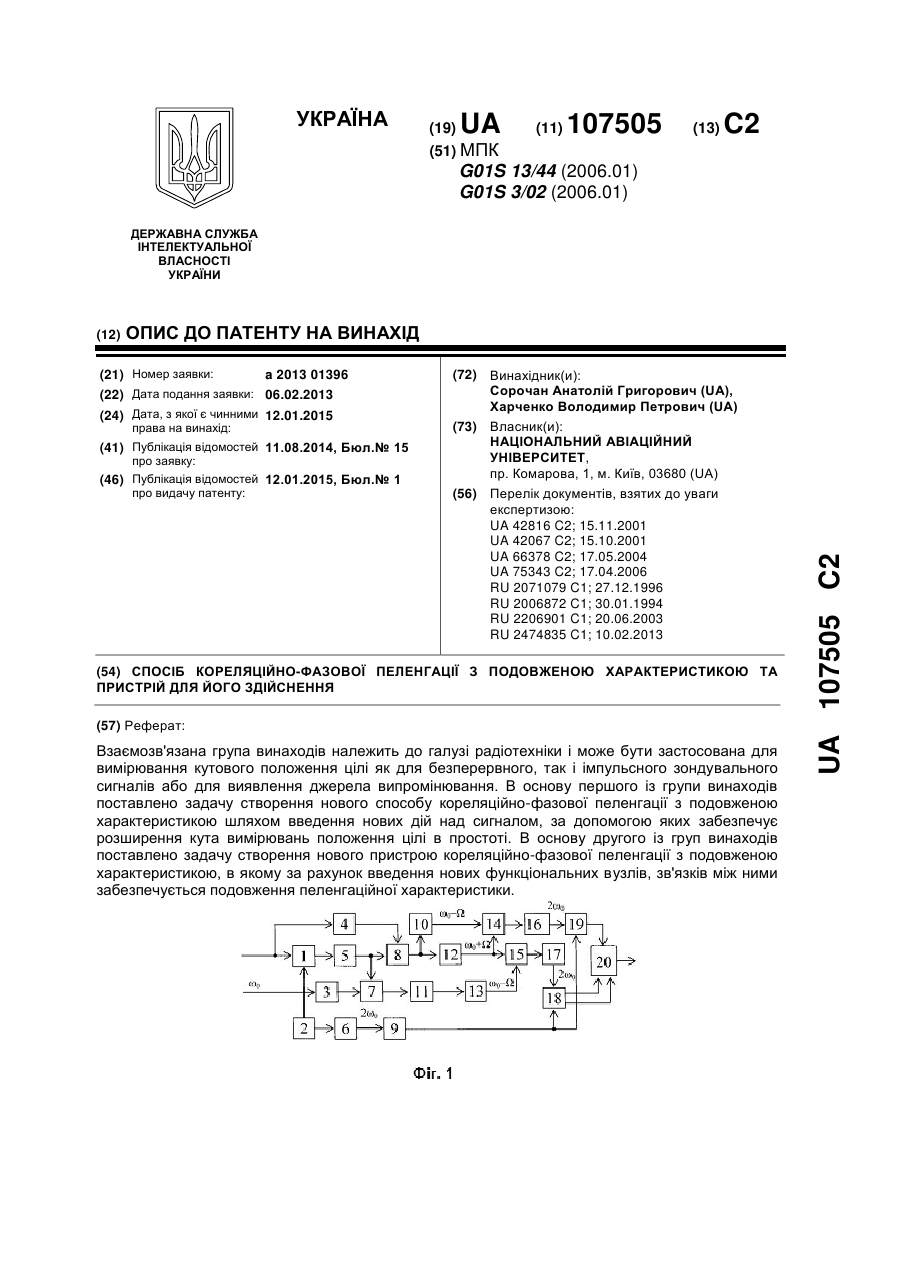
Реферат: Взаємозв'язана група винаходів належить до галузі радіотехніки і може бути застосована для вимірювання кутового положення цілі як для безперервного, так і імпульсного зондувального сигналів або для виявлення джерела випромінювання. В основу першого із групи винаходів поставлено задачу створення нового способу кореляційно-фазової пеленгації з подовженою характеристикою шляхом введення нових дій над сигналом, за допомогою яких забезпечує розширення кута вимірювань положення цілі в простоті. В основу другого із груп винаходів поставлено задачу створення нового пристрою кореляційно-фазової пеленгації з подовженою характеристикою, в якому за рахунок введення нових функціональних вузлів, зв'язків між ними забезпечується подовження пеленгаційної характеристики. UA 107505 C2 (12) UA 107505 C2 UA 107505 C2 5 10 Взаємозв'язана група винаходів належить до галузі радіотехніки і може бути застосована для вимірювання кутового положення цілі як для безперервного, так і імпульсного зондувального сигналів або для виявлення джерела випромінювання. Відомий J-кореляційний пеленгатор [1, 2], в якому сигнали прийняті на дві антени, рознесені в просторі на базову відстань В, обробляються. З першої антени сигнал u1( t ) затримується на регульовану калібровану величину x , отримують u1( t x ) , який розділюють на дві рівні частини. Одну частину сигналу відносять по частоті до частоти гетеродину w г і затримують на сталу часу 1 , одержаний сигнал u1(t x 1) перемножують з другою частиною сигналу u1( t x ) , з результату помноження на частоті w г виділяють опорний сигнал u1 ( t ) індекс модуляції якого const . З другої антени сигнал u1( t ) затримують на фіксований час 0 і перемножують з сигналом 15 20 25 u1(t x 1) , отриманим від першої антени, з результату помноження на частоті w г виділяють сигнал u1 ( t ) , індекс модуляції якого ar . В спектрах сигналів u1 ( t ) і u1 ( t ) режектують спектральні складові з частотою w г , одержані сигнали перемножують і на частоті 2w г виділяють гармонічний сигнал u2 (t ) , як результат згортки спектральних складових режектованих сигналів. Рівень отриманого сигналу u2 (t ) визначається відносною часовою затримкою вхідних сигналів. Отриманий сигнал детектують. Значення відносної часової затримки отримують зміною регульованої каліброваної затримки x , доводячи значення напруги u2 (t ) до рівня, рівного нулю. Недоліком способу необхідно певний час на перебудову каліброваної регульованою лінії затримки для вимірювання кутового положення цілі. Також відомий, вибраний як прототип, спосіб кореляційно-фазової пеленгації [3], згідно з яким, кутове положення цілі визначається по відбитому сигналу, який модульований за кутом, однотональним гармонійним коливанням з частотою . Спосіб включає два канали обробки сигналу. По першому каналу сигнал розгалужується на дві рівні частини. Одна частина затримується на сталу часу 2 , друга відноситься по частоті до частоти гетеродина w г та отримує затримку в часі на сталу часу ф . Одержані сигнали перемножують, після чого на частоті w г отримують сигнал u1( t ) . По другому каналу - сигнал затримують на сталу часу 1 , після чого перемножують з сигналом, затриманим на сталу часу Ф , з результату 30 35 40 45 50 перемноження на частоті w г отримують сигнал u2 (t ) . З сигналів u1( t ) і u2 (t ) виділяють спектральні складові, розташовані на частотах wг (або w г ) . Спектральну складову регульованого каналу затримують на сталу часу 3 . Отримані таким чином сигнали перемножують. З результату перемноження виділяють постійну складову, рівень якої відповідає кутовому положенню цілі. Недоліком способу кореляційно-фазової пеленгації є вкорочена пеленгаційна характеристика. Відомий пристрій J-кореляційного пеленгатора [1], що містить [2] регульовану калібровану лінію затримки, вхід якої є першим входом пристрою, а вихід через послідовно ввімкнені сигнальний вхід змішувача, смуговий фільтр, перший вхід другого перемножувача, перший режекторно-смуговий фільтр, перший вхід третього перемножувача, перший вузькосмуговий фільтр з'єднаний з амплітудним детектором. Вихід регульованої каліброваної лінії затримки також з'єднаний з другим входом другого перемножувала. Гетеродинний вхід змішувача з'єднаний з гетеродином. Вихід смугового фільтра з'єднаний з другим входом першого перемножувача. Вхід фіксованої лінії затримки є другим входом пристрою. Вихід фіксованої лінії затримки через послідовно ввімкнені перший вхід першого перемножувача і другий режекторносмуговий фільтр з'єднаний з другим входом третього перемножувача. Вихід амплітудного детектора є виходом пристрою. В цьому пристрої відлік кутового положення цілі здійснюється за деякий інтервал часу, необхідний для перебудови регульованої лінії затримки, що унеможливлює використання цього пристрою в моноімпульній пеленгації. Відомий пристрій кореляційно-фазової пеленгації [2] містить змішувач, вхід якого є першим входом пристрою. Другий вхід змішувача з'єднаний з гетеродином. Вихід змішувача з'єднаний через смуговий фільтр з першим входом другого перемножувача, його другий вхід з'єднаний з входом змішувача через другу лінію затримки. Вихід другого перемножувача через перший 1 UA 107505 C2 5 10 15 вузькосмуговий фільтр з'єднаний з першим входом третього перемножувача. Вхід першої лінія затримки є другим входом пристрою, її вихід з'єднаний з другим входом третього перемножувача через перший вхід першого перемножувала. Другий вхід першого перемножувача з'єднаний з виходом смугового фільтра. Вихід третього перемножувача з'єднаний з фільтром низьких частот, вихід якого є виходом пристрою. В цьому пристрою формується вкорочена пеленгаційна характеристика. В основу першого із групи винаходів поставлено задачу створення нового способу кореляційно-фазової пеленгації з подовженою характеристикою шляхом введення нових дій над сигналом, за допомогою яких забезпечує розширення кута вимірювань положення цілі в просторі. В основу другого із груп винаходів поставлено задачу створення нового пристрою кореляційно-фазової пеленгації з подовженою характеристикою, в якому за рахунок введення нових функціональних вузлів, зв'язків між ними забезпечується подовження пеленгаційної характеристики. Перша поставлена задача вирішується тим, що в способі кореляційно-фазової пеленгації з подовженою характеристикою з спектра опорного сигналу u1( t ) виділяють складову з частотою ( wг ) , перемножують зі складовою ( wг ) , з результату перемноження виділяють сумарну комбінаційну складову u3 (t ) з частотою 2w г , яку перемножують з опорним коливанням uог ( t ) , 20 отриманим з високостабільного кварцового коливання uкг (t) шляхом помноження його частоти на два та затримкою на сталу часу 3 , з результату перемноження виділяють постійну складову u4 (t ) , рівень якої пропорційний квадрату амплітуди сигналу u3 (t ) , з результату перемноження сигналів опорного каналу u ( t ) з частотою ( w ) і сигналу регульованого каналу u (t ) з г 1 25 30 35 40 45 2 частотою ( wг ) виділяють сумарну комбінаційну складову u5 (t ) з частотою 2w г з якої за допомогою опорного коливання uог ( t ) визначають знак і рівень амплітуди сигналу u5 (t ) , за допомогою визначених даних і рівня сигналу u4 (t ) визначають кутове положення цілі. Друга поставлена задача вирішується тим, що пристрій кореляційно-фазової пеленгації з подовженою характеристикою, згідно з винаходом, додатково введені помножувач частоти на два, третя лінія затримки, перший вузькосмуговий смуговий фільтр, третій перемножувач, четвертий і п'ятий вузькосмугові смугові фільтри, п'ятий перемножувач, пристрій визначення амплітуди сигналу і пристрій визначення кутового положення цілі, причому вихід другого перемножувача з'єднаний з першим входом пристрою визначення кутового положення цілі через послідовно з'єднані перший вузькосмуговий смуговий фільтр, перший вхід третього перемножувача, другий вхід якого з'єднаний з виходом третього вузькосмугового смугового фільтра, четвертий вузькосмуговий смуговий фільтр і через перший вхід п'ятого перемножувача, другий вхід якого з'єднаний з опорним генератором через послідовно з'єднані помножувач частоти на два і третю лінію затримки, вихід третій лінії затримки також з'єднаний з першим входом пристрою визначення амплітуди сигналу, вихід четвертого перемножувача через п'ятий вузькосмуговий смуговий фільтр з'єднаний з другим входом пристрою визначення амплітуди сигналу, перший і другий виходи якого з'єднані з відповідно другим і третім входами пристрою визначення кутового положення цілі, вихід якого є виходом пристрою. Суть винаходу пояснюється кресленнями, де на фіг. 1 наведена структурна схема запропонованого пристрою. Для того, щоб збільшити протяжність пеленгаційної характеристики в спосіб введені нові послідовності дій: з сигналу u1( t ) виділяють спектральну складову u1 ( t ) розташовану на частоті wг ділять на дві рівні частини, одну частину перемножують з спектральною складовою u ( t ) , 1 розташованою на частоті wг , отримують сигнал u4 (t ) з частотою 2w г , Другу частину перемножують з сигналом u2 ( t 4 ) , отримують сигнал u3 (t ) з частотою 2w г , сигнали u3 (t ) і u4 (t ) перемножують з опорним коливанням uог ( t ) , отриманим помноженням частоти 50 гетеродина w г на два і затримкою на сталу часу 3 , з результату множення з сигналу u4 (t ) отримують постійну напругу u5 (t ) , яка пропорційна квадрату амплітуди сигналу u4 (t ) , з сигналу uог ( t ) формують ортогональну пару гармонійних коливань uог ( t ) і uог ( t ) , які перемножують з сигналом u3 (t ) , з результату перемноження отримують низькочастотні складові u3 ( t ) і u 3 ( t ) , 2 UA 107505 C2 які є проекціями сигналу u3 (t ) на ортогональні складові uог ( t ) і uог ( t ) , отримані складові u3 ( t ) і u 3 ( t ) підносять до квадрата, підсумовують, після чого беруть корінь квадратний, в 5 10 15 20 25 30 35 40 результаті отримують напругу u6 (t ) , яка є амплітудою сигналу u3 (t ) , відносний рівень u6 (t ) , тобто u6 ( t ) , і її знак (плюс або мінус), що отримують зі складової u3 ( t ) , однозначно u5 ( t ) визначають в деякий момент часу t 0 кутове положення цілі 0 . На фіг. 1 наведена структурна схема запропонованого пристрою, де 1 - перший змішувач; 2 - кварцовий генератор; 3, 4 - перша, друга лінії затримки; 5 - смуговий фільтр; 6 - помножувач частоти на два; 7, 8 - перший та другий перемножувачі; 9 - третя лінія затримки; 10, 11 і 12 перший-третій вузькосмугові смугові фільтри; 13 - третя лінія затримки; 14, 15 - третій та четвертий перемножувачі; 16, 17 - четвертий та п'ятий вузькосмугові смугові фільтри; 18 пристрій визначення амплітуди і знака сигналу; 19 - п'ятий перемножувач; 20 - пристрій визначення кутового положення цілі. На фіг. 2 наведена структурна схема пристрою визначення амплітуди сигналу, де 21 фазообертач на ; 22, 23 - другий та третій змішувачі; 24, 25 - шостий та сьомий 2 перемножувачі; 26 - суматор; 27 - пристрій обчислення кореня квадратного. Пристрій відрізняється наявністю нових функціональних вузлів та зв'язків між ними, тобто додатково введені помножувач частоти на два, третя лінія затримки, перший вузькосмуговий смуговий фільтр, третій перемножувач, четвертий і п'ятий вузькосмугові смугові фільтри, п'ятий перемножувач, пристрій визначення амплітуди сигналу і пристрій визначення кутового положення цілі, причому вихід другого перемножувача з'єднаний з першим входом пристрою визначення кутового положення цілі через послідовно з'єднані перший вузькосмуговий смуговий фільтр, перший вхід третього перемножувача, другий вхід якого з'єднаний з виходом третього вузькосмугового смугового фільтра, четвертий вузькосмуговий смуговий фільтр і через перший вхід п'ятого перемножувача, другий вхід якого з'єднаний з опорним генератором через послідовно з'єднані помножувач частоти на два і третю лінію затримки, вихід третій лінії затримки також з'єднаний з першим входом пристрою визначення амплітуди сигналу, вихід четвертого перемножувача через п'ятий вузькосмуговий смуговий фільтр з'єднаний з другим входом пристрою визначення амплітуди сигналу, перший і другий виходи якого з'єднані з відповідно другим і третім входами пристрою визначення кутового положення цілі, вихід якого є виходом пристрою. Пристрій працює таким чином: Сигнал прийнятий на дві рознесенні в просторі антени має відносну простору часову затримку і надходить на відповідні входи пристрою. На першому вході діє сигнал u(t ) Uc cosw 0t sin( t) . На другому вході - сигнал з просторою часовою затримкою u(t ) Uc cosw0 (t ) sin[ (t )] , де w 0 - несуча частота; - індекс модуляції сигналу зондування; - модулююча частота. У опорному каналі сигнал ділиться на дві частини. Перша частина за допомогою змішувача 1 зміщується вниз по частоті на частоту w г гетеродина 2, яка виділяється смуговим фільтром 5 і подається на перший вхід другого перемножувача 8 u( t ф ) Uc cos ( w 0 w г )(t ф ) sin[ ( t ф ) г ] , 45 де г - фаза гетеродина 2; ф - затримка у смуговому фільтрі 5. На другий вхід другого перемножувача 8 через другу лінію затримки 4 з часовою затримкою подається сигнал з входу змішувача 1 2 u(t 2 ) Uc cosw 0 (t 2 ) sin[ (t 2 )] . У результаті перемножування сигналів u( t ф ) і u(t 2 ) на частоті w г формується сигнал з кутовою модуляцією у вигляді u1( t ) U1 cosw г t sin[ t] 1 U1 50 Jn () cos( w г n)t 1 , n де 2 sin 0,5( 2 ф ) 2,0 - заново сформований індекс модуляції; 3 UA 107505 C2 1 w 0 ( 2 ф ) w г ф г - фаза сигналу u1( t ) . У регульованому каналі сигнал u(t ) затримується у перший лінії затримки 3 на сталу часу, рівну 1 (стала часу 1 має дорівнювати ф ), отримуємо сигнал 5 u( t 1) U1 cosw 0 ( t 1) sin[ ( t 1)] . Сигнал u(t 1) подається на перший вхід першого перемножувача 7, на другий вхід якого подається сигнал u( t ф ) з виходу смугового фільтра 5. З результату перемноження на виході першого перемножувача 7 на частоті w г формується сигнал u2 ( t ) U1 cosw г t sin[ t] 2 U1 де 10 Jn () cos( w г n)t 2 , n 2 sin 0,5( 1 ф ) 2 sin( 0,5) знову сформований індексмодуляції; 2 w 0 ( 1 ф ) w г ф г - фаза сигналу. Вузькосмуговими смуговими фільтрами 10, 12 з сигналу u1( t ) виділяються спектральні складові з частотами ( wг ) та ( wг ) відповідно, а вузькосмуговим смуговим фільтром 11 з 15 сигналу u2 (t ) виділяється спектральна складова з частотою ( wг ) , в результаті отримуємо такі сигнали: опорного каналу u1 (t ) U1J1() cos ( wг )t 1 пф , u1(t ) U1J1() cos( wг )t 1 пф , регульованого каналу u2 (t) U1J1() cos ( wг )t 2 пф , 20 де пф - зсув фази за рахунок проходження сигналу через вузькосмугові смугові фільтри 10, 11, 12. Регульований сигнал u2 ( t ) затримують в четвертій лінії затримки 13 на сталу часу 4 , яка при 0 забезпечує рівність фаз сигналів u1 ( t ) і u2 ( t ) , діючих на входах перемножувача 15, тобто отримують сигнал , u (t ) U J () cos ( w )t ( w ) 2 25 30 35 4 1 1 г г 4 2 пф в якому 4 w 0 ( 2 1) . ( w г ) В результаті перемножування сигналів u1 ( t ) та u2 ( t 3 ) на виході перемножувача 15 формуються комбінаційні складові з різницевої і сумарної частотами. За допомогою вузькосмугового смугового фільтра 17 з середньою частотою 2w г виділяється сигнал сумарної частоти u3 ( t ) U2J1()J1() cos w г 2w г t 1 w 0 ( 2 1) 2 2пф пф , U2J1()J1() cos 2w г t 3 w 0 пф де 3 2w г ф 2w 0 ( 2 1) 2г 2пф ; - зсув фази за рахунок проходження сигналу пф через вузькосмугові смугові фільтри 16, 17. Так як кутове положення цілі (р зв'язано з часовою затримкою виразом B sin max sin , c B де - max - максимальне можливе значення відносної часової затримки вхідних c сигналів, діючих на виходах антен. При зміні кутового положення цілі змінюється простора затримка , яка приймає значення від мінус max до плюс max , при цьому індекс модуляції буде приймати значення від мінус max 2,0 до плюс max 2,0 , що приведе до відповідної зміни функції Бесселя J1() , тобто 4 UA 107505 C2 рівня амплітуди сигналу u3 (t ) . Звідси кутове положення цілі визначається амплітудою сигналу u3 (t ) . Відносне значення сигналу u3 (t ) дає пеленгаційну характеристику. 5 Виділенні сигнали опорного каналу u1 ( t ) і u1 ( t ) перемножуються в 14. На виході перемножувача 14 формуються комбінаційні складові різницевої і сумарної частотами. За допомогою вузькосмугового смугового фільтра 16 з середньою частотою 2w r виділяється сигнал сумарної частоти, яка описується в вигляді 2 2 м4 u4 (t) U2J1 () cos 2wг t 21 2пф U2J1 () cos2wr t , пф 3 де 3 2w r ф 2w 0 ( 2 1) 2г 2пф . 3 пф пф 10 Сигнал u4 (t ) подається на перший вхід п'ятого перемножувача 19, на другий вхід якого подається опорний сигнал uoг ( t ) , який сформований з сигналу uкг (t) кварцового генератора 2 шляхом множення його частоти на два в помножувачі частоти 6, виділення потрібної складової з частотою і затримкою в третій лінії затримки 9 на сталу часу 2w r w 0 ( 2 ф ) w г ф пр , яка дає фазовий зсув wг uкг (t ) U0 coswг t г , на виході лінії затримки 9 отримують опорне коливання uог ( t ) U0 cos 2w г t 2г 2w г 3 пф 3 15 2 w г 3 , тобто U0 cos 2w г t 2w o ( 2 ф ) 2w г ф 2г 2пф U0 cos2w г t 4 пф де 4 2w г 3 2г 2w 0 ( 2 ф ) 2w г ф 2пф 2г . пф пф з коливання , Виділення з результату перемноження u4 (t ) і uoг ( t ) низькочастотної складової визначиться у вигляді 20 2 u5 ( t ) U2J1 () , подається на перший вхід пристрою визначення кутового положення цілі 20. Сигнал u3 (t ) подається на перший вхід пристрою визначення амплітуди 18. На другий вхід якого подається опорний сигнал uoг ( t ) . В пристрої визначення амплітуди 18 з опорного сигналу uoг ( t ) за допомогою фазовращателя 21 на 25 пара сигналів uoг ( t ) і uог ( t ) ; uoг (t ) Uo sin 2wг t 2w 0 (2 ф ) 2wг ф 2г 2пф пф 30 2 формується ортогональна , uoг ``(t ) Uo cos 2wг t 2w0 (2 ф ) 2wг ф 2г 2пф пф яки подаються відповідно на перши входи змішувачів 22, 23, на другі входи яких подається вхідний сигнал u3 (t ) . З результату перемножування відповідних сигналів на виходах змішувачів 22 і 23 виділяються різницеві складові, яки описуються як u t U J J () cosw ; 3 2 1 1 o u3 t U2J1J1() sinw o . 35 За допомогою вихідного сигналу u3 ( t ) визначає знак напруги u3 (t ) і подається на другий вхід пристрою визначення кутового положення цілі 20. При зміні кутового положення цілі змінюється простора затримка , яка приймає значення від мінус max до плюс max при цьому індекс модуляції буде приймати значення від мінус max 2,0 до плюс max 2,0 , що приведе до відповідної зміни як знака так и рівня функції Бесселя J1() . 2 2 Отримані сигнали u3 ( t ) , u 3 ( t ) підносяться до (24, 25) квадрата u3 t , u3 t , підсумовуються (26) u t u t , 2 3 2 3 із суми 5 обчислюється корінь квадратний UA 107505 C2 2 2 u t u t , в результаті на виході пристрою визначення амплітуди 18, отримуємо 3 3 сигнал u6 t U2J1 J1 . Сигнал u6 t подається в третій вхід пристрою визначення кутового положення цілі 20. В 5 10 15 20 пристрої 20 для визначення кутового положення цілі сигнал u6 t і u5 t , визначені в деякий час u t t 0 , тобто u6 t 0 і u5 t 0 ділять одне на друге, отримують деяке число 6 0 (за допомогою u5 t 0 напруги u3 ( t ) визначається його знак), яке по пеленгаційній характеристиці F визначає кутове положення цілі. Пеленгаційна характеристика являє собою відношення F u6 t . u5 t Яку з урахуванням того, що J1() const , а індекс модуляції 2 (що дає 1 1734 У і з , J1 урахуванням залежностей 2 sin(0,5) і max sin та знака u3 ( t ) можна записати у вигляді B F 17J1 2sin 0,5 sin 17J12 sin( 0,5max sin . , , c Джерела інформації: 1. Патент 42816 Україна, G01S 3/00. Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення / Сорочан А.Г., Лігінов С.М., Литвиненко В.І. № 97073670; заявл. 09.07.1997; опубл. 15.11.2001. - Бюл. № 10. 2. Сорочан А.Г. j-корреляционный метод пеленгации / А.Г. Сорочан // Изв. вузов. Радиоэлектроника. 2001. -№ 11. - С. 57-65. 3. Заявка на патент України № а201115158 від 21.12.11, G01S 3/02 G01S 13/44. ФОРМУЛА ВИНАХОДУ 25 30 1. Спосіб кореляційно-фазової пеленгації з подовженою характеристикою, згідно з яким кутове положення цілі визначається по відбитому сигналу, який модульований за кутом, однотональним гармонійним коливанням, при його проходженні роздільними каналами розповсюдження включає: по першому каналу - розгалуження сигналу на дві рівні частини, одна з яких затримується на сталу часу 2 , друга відноситься по частоті до частоти гетеродина w г та отримує затримку в часі на сталу часу ф , одержані сигнали перемножують, з результату перемноження на частоті w г отримують сигнал u1( t ) , по другому каналу - сигнал затримують на сталу часу 1 , після чого перемножують з сигналом, затриманим на сталу часу ф , з 35 результату перемноження на частоті w г отримують сигнал u2 (t ) , з сигналів u1( t ) і u2 (t ) виділяють спектральні складові u1 ( t ) і u2 ( t ) , розташовані на частотах wг , сигнал u2 ( t ) затримують на сталу часу 4 , отримують сигнал u 2 ( t 4 ) , який відрізняється тим, що з сигналу u1( t ) виділяють спектральну складову u1 ( t ) , розташовану на частоті wг , та ділять на дві рівні частини, одну частину перемножують з спектральною складовою u ( t ) , 1 розташованою на частоті wг , отримують сигнал u4 (t ) з частотою 2w г , другу частину перемножують з сигналом u 2 ( t 4 ) , отримують сигнал u3 (t ) з частотою 2w г , сигнали u4 (t ) і 40 u3 (t ) перемножують з опорним коливанням uoг ( t ) , отриманим помноженням частоти гетеродина w г на два і затримкою на сталу часу 3 , з результату множення з сигналу u4 (t ) отримують постійну напругу u5 (t ) , яка пропорційна квадрату амплітуди сигналу u4 (t ) , з сигналу uог ( t ) формують ортогональну пару гармонійних коливань u ог ( t ) і uог ( t ) , які перемножують з 6 UA 107505 C2 сигналом u3 (t ) , з результату перемноження виділяють низькочастотні складові u3 ( t ) і u 3 ( t ) , які є проекціями сигналу u3 (t ) на ортогональні складові u oг ( t ) і uoг ( t ) , отримані складові u ( t ) і u ( t ) підносять до квадрата, підсумовують, після чого беруть корінь квадратний, в 3 5 10 15 20 25 3 результаті отримують напругу u6 (t ) , яка є амплітудою сигналу u3 (t ) , відносний рівень u6 (t ) , u t тобто 6 , і її знак (плюс або мінус), що отримують зі складової u3 ( t ) , однозначно u5 t визначають в деякий момент часу t 0 кутове положення цілі 0 . 2. Пристрій кореляційно-фазової пеленгації з подовженою характеристикою, який містить змішувач, вхід якого є першим входом пристрою, другий вхід якого з'єднаний з гетеродином, а вихід через послідовно з'єднані смуговий фільтр, перший вхід другого перемножувача, третій вузькосмуговий смуговий фільтр з'єднаний з першим входом четвертого перемножувача, другий вхід другого перемножувача з'єднаний з входом змішувача через другу лінію затримки, перша лінія затримки, вхід якої є другим входом пристрою, з'єднана через послідовно з'єднані перший вхід першого перемножувача, другий вузькосмуговий смуговий фільтр і четверту лінію затримки з другим входом четвертого перемножувача, вихід смугового фільтра з'єднаний з другим входом першого перемножувача, який відрізняється тим, що в нього введені помножувач частоти на два, третя лінія затримки, перший вузькосмуговий смуговий фільтр, третій перемножувач, четвертий і п'ятий вузькосмугові смугові фільтри, п'ятий перемножувач, пристрій визначення амплітуди сигналу і пристрій визначення кутового положення цілі, причому вихід другого перемножувача з'єднаний з першим входом пристрою визначення кутового положення цілі через послідовно з'єднані перший вузькосмуговий смуговий фільтр, перший вхід третього перемножувача, другий вхід якого з'єднаний з виходом третього вузькосмугового смугового фільтра, четвертий вузькосмуговий смуговий фільтр і через перший вхід п'ятого перемножувача, другий вхід якого з'єднаний з опорним генератором через послідовно з'єднані помножувач частоти на два і третю лінію затримки, вихід третій лінії затримки також з'єднаний з першим входом пристрою визначення амплітуди сигналу, вихід четвертого перемножувача через п'ятий вузькосмуговий смуговий фільтр з'єднаний з другим входом пристрою визначення амплітуди сигналу, перший і другий виходи якого з'єднані з відповідно другим і третім входами пристрою визначення кутового положення цілі, вихід якого є виходом пристрою. Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюSorochan Anatolii Hryhorovych, Kharchenko Volodymyr Petrovych
Автори російськоюСорочан Анатолий Григорьевич, Харченко Владимир Петрович
МПК / Мітки
МПК: G01S 3/02, G01S 13/44
Мітки: здійснення, пеленгації, пристрій, кореляційно-фазової, подовженою, спосіб, характеристикою
Код посилання
<a href="https://ua.patents.su/9-107505-sposib-korelyacijjno-fazovo-pelengaci-z-podovzhenoyu-kharakteristikoyu-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб кореляційно-фазової пеленгації з подовженою характеристикою та пристрій для його здійснення</a>
Спосіб кореляційно-фазової пеленгації та пристрій для його здійснення
Номер патенту: 106986
Опубліковано: 10.11.2014
Автори: Харченко Володимир Петрович, Сорочан Анатолій Григорович
МПК: G01S 13/44, G01S 3/02
Мітки: здійснення, пеленгації, спосіб, кореляційно-фазової, пристрій
Формула / Реферат:
1. Спосіб кореляційно-фазової пеленгації, згідно з яким кутове положення цілі визначається по відбитому сигналу, який модульований за кутом однотональним гармонійним коливанням з частотою W, містить: по першому каналу - розгалуження сигналу на дві рівні частини, одна з яких затримується на сталу часу t2, друга належить по частоті до частоти гетеродину wr та отримує затримку в часі на сталу часу tф, одержані сигнали перемножують, після чого...
Спосіб виділення тактового синхросигналу з кореляційно кодованого інформаційного сигналу та пристрій для його здійснення
Номер патенту: 42903
Опубліковано: 15.11.2001
Автори: Ланько Анатолій Анатолійович, Пантелєєв Віктор Володимирович, Гаврилюк Марко Савелійович
Мітки: пристрій, спосіб, кореляційної, тактового, синхросигналу, здійснення, кодованого, інформаційного, сигналу, виділення
Формула / Реферат:
1. Спосіб виділення тактового синхросигналу з кореляційно кодового інформаційного сигналу, який полягає в тому, що тактовий синхросигнал формують шляхом нелінійної обробки відкоректованого інформаційного сигналу, який відрізняється тим, що значення і знак тактового непогодження визначають на двотактному інтервалі безпосередньо з поточних око-переходів і використовують цю інформацію через зворотний зв'язок за прийнятим рішенням для відстеження...
Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції та пристрій для його здійснення
Номер патенту: 66378
Опубліковано: 17.05.2004
Автори: Клепфер Євген Іванович, Григор'єва Людмила Володимирівна, Антонюк Володимир Павлович
МПК: G01S 13/06, G01S 13/42, G01S 5/00
Мітки: спосіб, радіосигналу, вимірювання, різниці, обмеженим, вузькосмугового, пристрій, кореляції, часу, затримки, інтервалом, здійснення
Формула / Реферат:
1. Спосіб вимірювання різниці часу затримки вузькосмугового радіосигналу з обмеженим інтервалом кореляції, оснований на визначенні попереднього наближення різниці затримки сигналу по максимуму огинаючої взаємної кореляційної функції з подальшим уточненням результату по даних вимірювання фази в точці попереднього наближення, який відрізняється тим, що в умовах апріорної невизначеності несучої частоти сигналу, одночасно з вимірюванням фази...
Спосіб вимірювання тимчасової затримки модульованого сигналу при його проходженні окремими каналами розповсюдження та пристрій для його здійснення
Номер патенту: 42816
Опубліковано: 15.11.2001
Автори: Литвиненко Валентин Іванович, Лігінов Сергій Михайлович, Сорочан Анатолій Григорович
МПК: G01S 3/00
Мітки: здійснення, затримки, спосіб, сигналу, проходженні, пристрій, окремими, тимчасово, каналами, розповсюдження, вимірювання, модульованого
Формула / Реферат:
1.Спосіб вимірювання тимчасової затримки модульованого сигналу при його - проходженні окремими каналами розповсюдження, містить регульовану калібровану затримку сигналу першого каналу, який відносять по частоті на частоту гетеродина wr і затрмують на сталу величину
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації

Номер патенту: 69507
Опубліковано: 25.04.2012
Автори: Меленті Євген Олександрович, Рот Світлана Миколаївна, Воробйов Руслан Володимирович, Макаров Сергій Анатолійович, Чекунова Оксана Миколаївна
МПК: H03L 7/00
Мітки: каналом, автопідстройки, фазової, компенсації, додатковим, пристрій, частоти
Формула / Реферат:
Пристрій фазової автопідстройки частоти з додатковим каналом фазової компенсації містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу...
Попередній патент: Спосіб лікування п’яткової шпори за індріксоном
Наступний патент: Спосіб визначення біологічної активності об’єктів природного походження
Випадковий патент: Спосіб моделювання хронічного емоційного стресу в експерименті