Пристрій для зондування ока людини
Номер патенту: 109513
Опубліковано: 25.08.2016
Автори: Климов Максим Вікторович, Молебний Василь Васильович, Яганов Петро Олексійович, Мадала Шрідар, Вокил Джо

Формула / Реферат
Пристрій для зондування ока людини, до складу якого входить лазерний блок, позиційно чутливий фотоприймач, блок орієнтації та акомодації ока, обчислювач аберацій та блок управління, електрично зв'язаний з лазерним блоком, з позиційно-чутливим фотоприймачем та з обчислювачем аберацій, який відрізняється тим, що лазерний блок виконано у вигляді багатоканального лазерного випромінювача, до його виходів через багатоканальну вхідну оптику приєднано багатоканальну оптично-волоконну лінію так, що кожне оптоволокно оптично зв'язане з відповідним йому окремим лазером багатоканального лазерного випромінювача, а на вихідному зрізі багатоканальної оптично-волоконної лінії встановлено багатоканальну вихідну оптику з функцією формування паралельного зондуючого пучка з виходу кожного оптоволокна паралельно до оптичної осі пристрою, причому до складу блока управління введено мікроконтролер, запрограмований так, щоб під час вимірювання у кожен момент часу випромінювали лише задані програмно окремі лазерні випромінювачі.
Текст
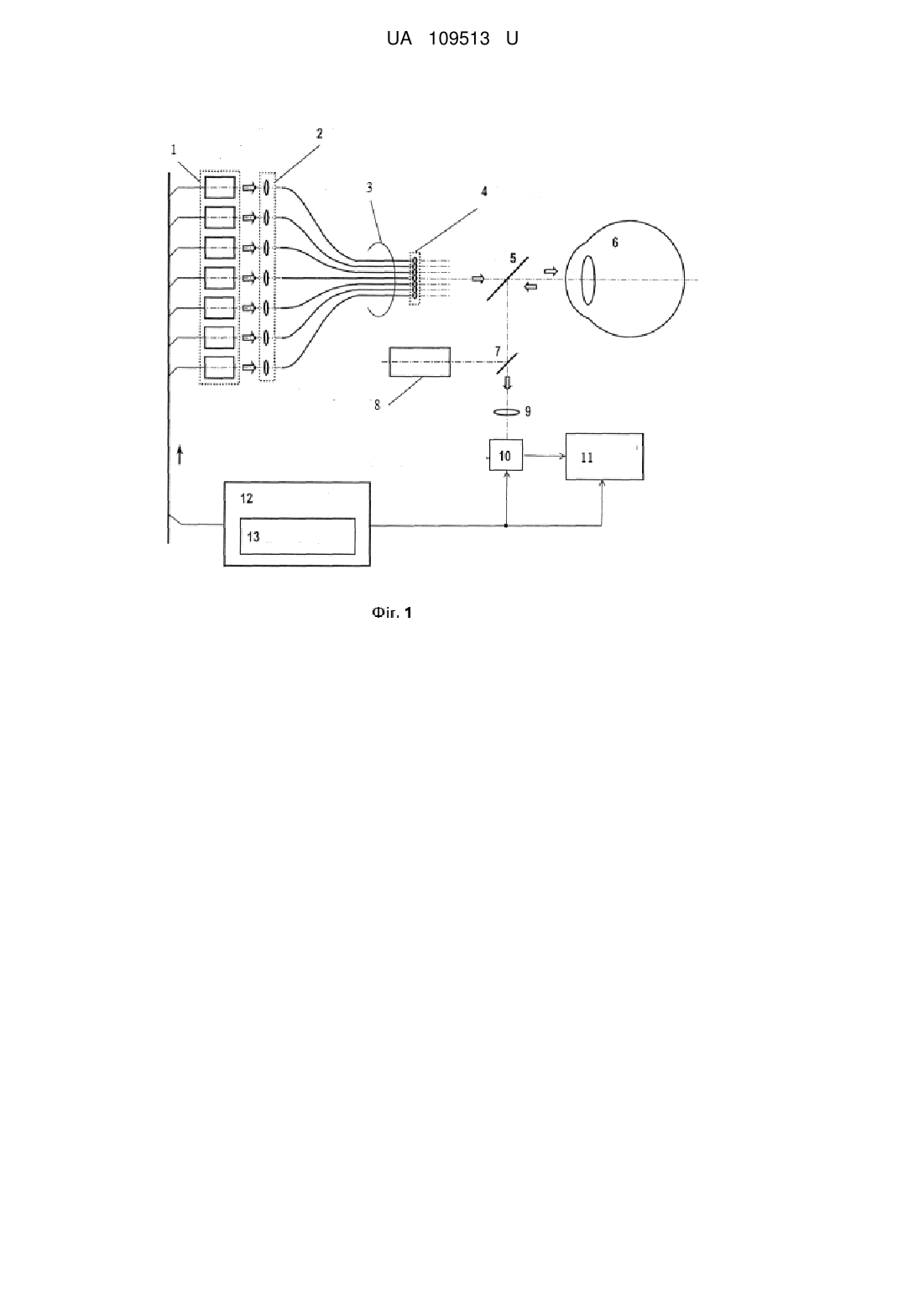
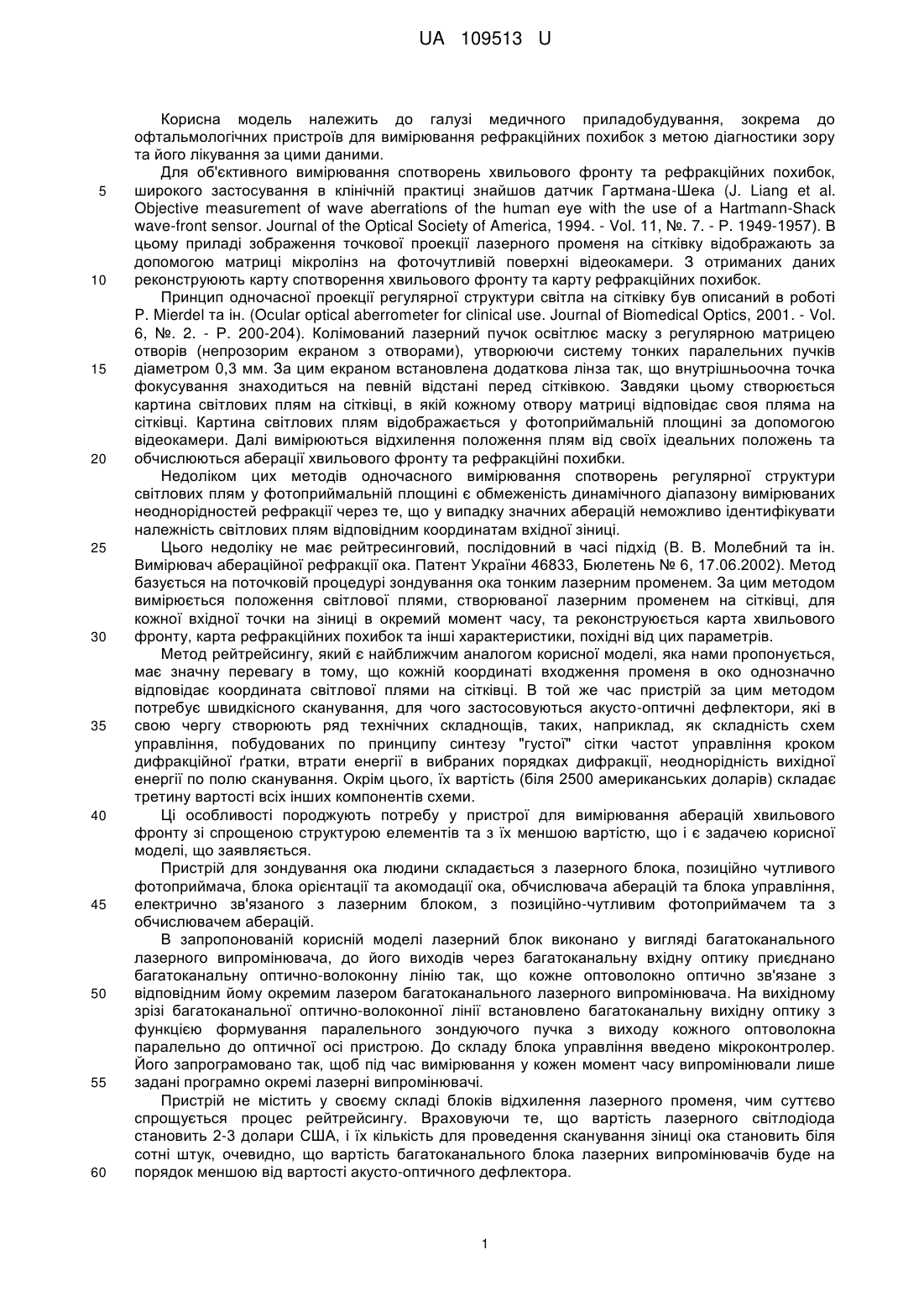
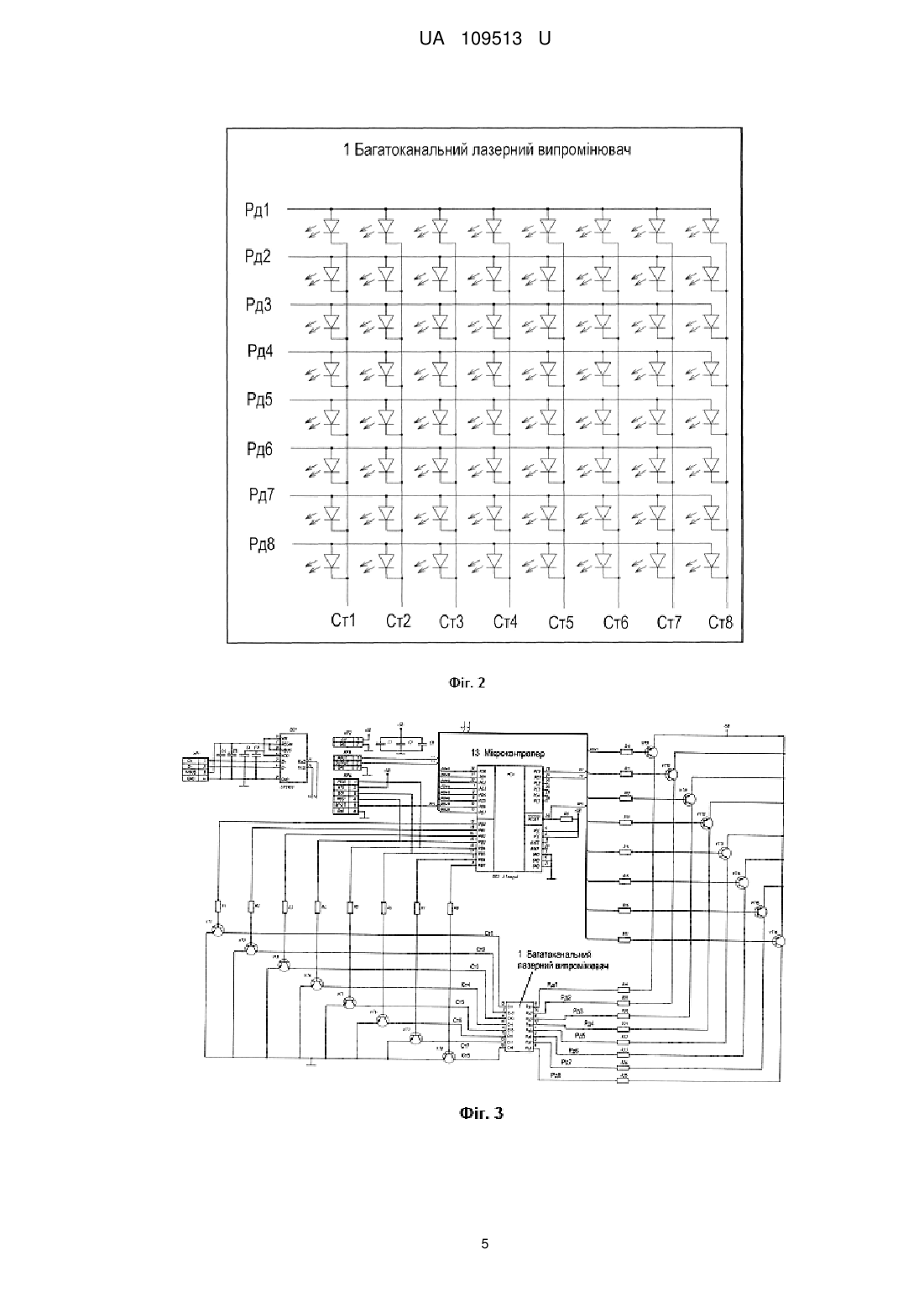
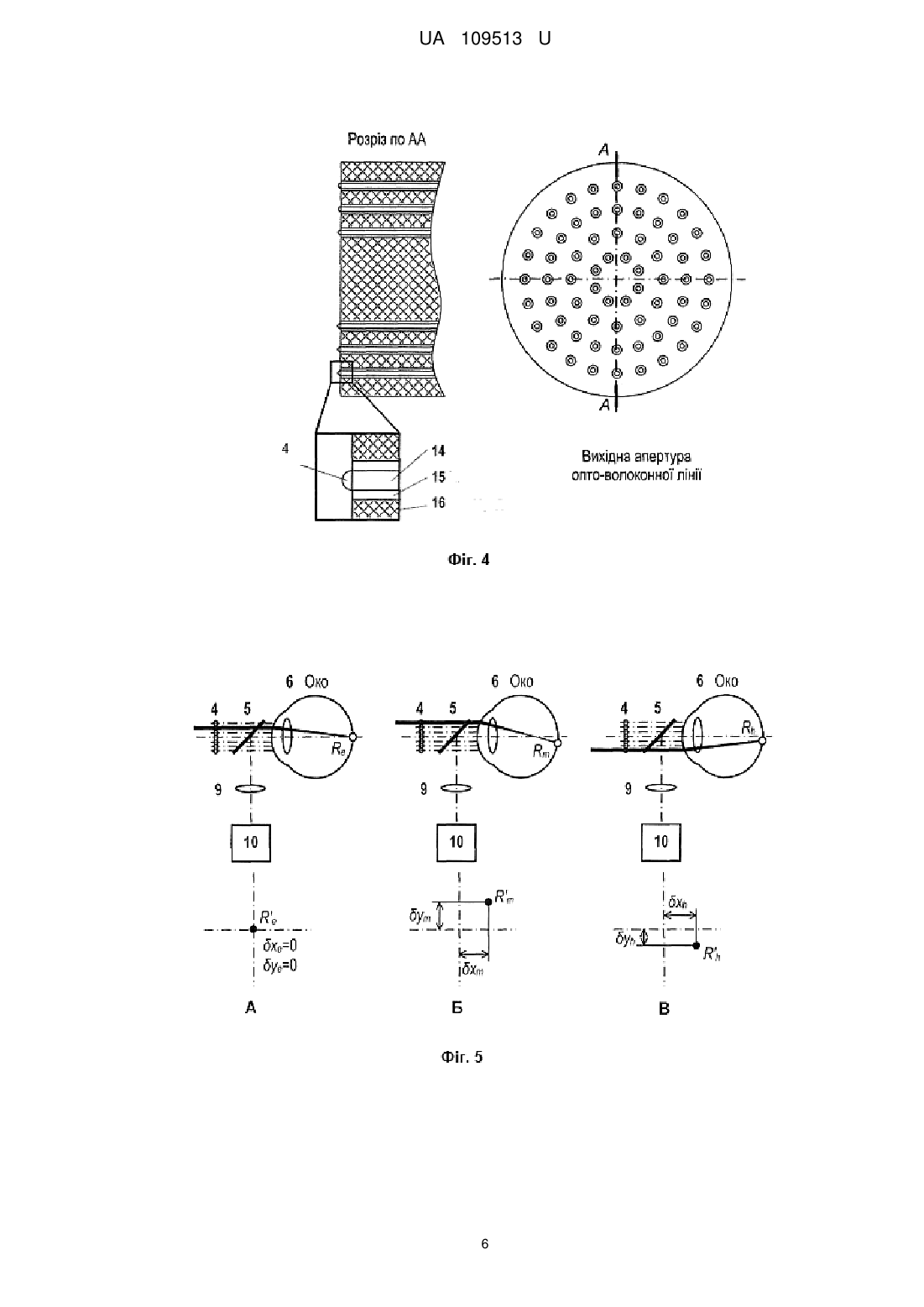
Реферат: Пристрій для зондування ока людини, до складу якого входить лазерний блок, позиційно чутливий фотоприймач, блок орієнтації та акомодації ока, обчислювач аберацій та блок управління, електрично зв'язаний з лазерним блоком, з позиційно-чутливим фотоприймачем та з обчислювачем аберацій. Лазерний блок виконано у вигляді багатоканального лазерного випромінювача, до його виходів через багатоканальну вхідну оптику приєднано багатоканальну оптично-волоконну лінію так, що кожне оптоволокно оптично зв'язане з відповідним йому окремим лазером багатоканального лазерного випромінювача. На вихідному зрізі багатоканальної оптично-волоконної лінії встановлено багатоканальну вихідну оптику з функцією формування паралельного зондуючого пучка з виходу кожного оптоволокна паралельно до оптичної осі пристрою. До складу блока управління введено мікроконтролер, запрограмований так, щоб під час вимірювання у кожен момент часу випромінювали лише задані програмно окремі лазерні випромінювачі. UA 109513 U (12) UA 109513 U UA 109513 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі медичного приладобудування, зокрема до офтальмологічних пристроїв для вимірювання рефракційних похибок з метою діагностики зору та його лікування за цими даними. Для об'єктивного вимірювання спотворень хвильового фронту та рефракційних похибок, широкого застосування в клінічній практиці знайшов датчик Гартмана-Шека (J. Liang et al. Objective measurement of wave aberrations of the human eye with the use of a Hartmann-Shack wave-front sensor. Journal of the Optical Society of America, 1994. - Vol. 11, №. 7. - Р. 1949-1957). В цьому приладі зображення точкової проекції лазерного променя на сітківку відображають за допомогою матриці мікролінз на фоточутливій поверхні відеокамери. З отриманих даних реконструюють карту спотворення хвильового фронту та карту рефракційних похибок. Принцип одночасної проекції регулярної структури світла на сітківку був описаний в роботі P. Mierdel та ін. (Ocular optical aberrometer for clinical use. Journal of Biomedical Optics, 2001. - Vol. 6, №. 2. - Р. 200-204). Колімований лазерний пучок освітлює маску з регулярною матрицею отворів (непрозорим екраном з отворами), утворюючи систему тонких паралельних пучків діаметром 0,3 мм. За цим екраном встановлена додаткова лінза так, що внутрішньоочна точка фокусування знаходиться на певній відстані перед сітківкою. Завдяки цьому створюється картина світлових плям на сітківці, в якій кожному отвору матриці відповідає своя пляма на сітківці. Картина світлових плям відображається у фотоприймальній площині за допомогою відеокамери. Далі вимірюються відхилення положення плям від своїх ідеальних положень та обчислюються аберації хвильового фронту та рефракційні похибки. Недоліком цих методів одночасного вимірювання спотворень регулярної структури світлових плям у фотоприймальній площині є обмеженість динамічного діапазону вимірюваних неоднорідностей рефракції через те, що у випадку значних аберацій неможливо ідентифікувати належність світлових плям відповідним координатам вхідної зіниці. Цього недоліку не має рейтресинговий, послідовний в часі підхід (В. В. Молебний та ін. Вимірювач абераційної рефракції ока. Патент України 46833, Бюлетень № 6, 17.06.2002). Метод базується на поточковій процедурі зондування ока тонким лазерним променем. За цим методом вимірюється положення світлової плями, створюваної лазерним променем на сітківці, для кожної вхідної точки на зіниці в окремий момент часу, та реконструюється карта хвильового фронту, карта рефракційних похибок та інші характеристики, похідні від цих параметрів. Метод рейтрейсингу, який є найближчим аналогом корисної моделі, яка нами пропонується, має значну перевагу в тому, що кожній координаті входження променя в око однозначно відповідає координата світлової плями на сітківці. В той же час пристрій за цим методом потребує швидкісного сканування, для чого застосовуються акусто-оптичні дефлектори, які в свою чергу створюють ряд технічних складнощів, таких, наприклад, як складність схем управління, побудованих по принципу синтезу "густої" сітки частот управління кроком дифракційної ґратки, втрати енергії в вибраних порядках дифракції, неоднорідність вихідної енергії по полю сканування. Окрім цього, їх вартість (біля 2500 американських доларів) складає третину вартості всіх інших компонентів схеми. Ці особливості породжують потребу у пристрої для вимірювання аберацій хвильового фронту зі спрощеною структурою елементів та з їх меншою вартістю, що і є задачею корисної моделі, що заявляється. Пристрій для зондування ока людини складається з лазерного блока, позиційно чутливого фотоприймача, блока орієнтації та акомодації ока, обчислювача аберацій та блока управління, електрично зв'язаного з лазерним блоком, з позиційно-чутливим фотоприймачем та з обчислювачем аберацій. В запропонованій корисній моделі лазерний блок виконано у вигляді багатоканального лазерного випромінювача, до його виходів через багатоканальну вхідну оптику приєднано багатоканальну оптично-волоконну лінію так, що кожне оптоволокно оптично зв'язане з відповідним йому окремим лазером багатоканального лазерного випромінювача. На вихідному зрізі багатоканальної оптично-волоконної лінії встановлено багатоканальну вихідну оптику з функцією формування паралельного зондуючого пучка з виходу кожного оптоволокна паралельно до оптичної осі пристрою. До складу блока управління введено мікроконтролер. Його запрограмовано так, щоб під час вимірювання у кожен момент часу випромінювали лише задані програмно окремі лазерні випромінювачі. Пристрій не містить у своєму складі блоків відхилення лазерного променя, чим суттєво спрощується процес рейтрейсингу. Враховуючи те, що вартість лазерного світлодіода становить 2-3 долари США, і їх кількість для проведення сканування зіниці ока становить біля сотні штук, очевидно, що вартість багатоканального блока лазерних випромінювачів буде на порядок меншою від вартості акусто-оптичного дефлектора. 1 UA 109513 U 5 10 15 20 25 30 35 40 45 50 55 60 Перелік фігур креслення Фіг. 1 зображує структуру пристрою для зондування ока людини. Фіг. 2 відтворює схему з'єднання лазерних випромінювачів у багатоканальному блоці лазерних випромінювачів. Фіг. 3 подає схему електричну принципову пристрою. На фіг. 4 подано зображення кінцевої частини багатоканальної оптично-волоконної лінії зі зразком розташування оптоволокон у вихідній апертурі. Фіг. 5 ілюструє приклад проходження променя у пристрої під час зондування ока: А випадок, коли промінь перетинає сітківку в точці її перетину зоровою віссю (випадок еметропії); Б - випадок міопії; В - випадок гіперметропії. Пристрій для зондування ока людини описано нижче з посиланнями на фігури креслення. Як видно з фіг. 1, пристрій складається з багатоканального лазерного випромінювача 1, на виході якого встановлено елементи багатоканальної вхідної оптики 2 багатоканальної оптичноволоконної лінії 3. На виході оптично-волоконної лінії 3 встановлено багатоканальну вихідну оптику 4, через яку лазерні пучки після проходження через світлоподільник 5 спрямовуються в око 6. Через світлоподільник 7 з оптичною віссю вихідної оптики 4 оптично зв'язаний блок 8 орієнтації та акомодації ока. Відбите від сітківки ока 6 випромінювання спрямовується світлоподільником 5 через світлоподільник 7 та об'єктив 9 на позиційно-чутливий фотоприймач 10, з виходом якого електрично зв'язаний обчислювач аберацій 11. Багатоканальний лазерний випромінювач 1, позиційно-чутливий фотоприймач 10 та обчислювач аберацій 11 через електричні зв'язки синхронізуються блоком управління 12. До його складу входить мікроконтролер 13. Випромінювання, згенероване багатоканальним лазерним випромінювачем 1, через вхідну оптику 2 надходить в оптично-волоконну лінію 3. Кожне оптоволокно лінії 3 через вхідну оптику 2 має оптичний зв'язок з кожним окремим лазером багатоканального лазерного випромінювача 1, а на вихідному зрізі кожного оптоволокна встановлено формуючу багатоканальну вихідну оптику 4, функцією якої є формування паралельного зондуючого пучка з виходу кожного оптоволокна паралельно до оптичної осі пристрою. Блок 8 орієнтації та акомодації ока оптично пов'язаний з оком 6 через світлоподільники 7 та 5. Його основним призначенням є таке позиціонування та орієнтування ока, щоб його зорова вісь співпадала з оптичною віссю пристрою, а стан акомодації ока відповідав станові, заданому оптометристом/лікарем. Найчастіше це стан розслабленої акомодації. Специфіка виконання цього блока не входить в обсяг задач даної корисної моделі. Згадування про нього наводиться тут лише для того, щоб мати на увазі необхідність встановлення співвісності пристрою і досліджуваного ока та виконання вимірювань при заданому акомодаційному стані ока. Багатоканальний лазерний випромінювач 1 (наприклад, такий, що складається з напівпровідникових лазерних діодів) доцільно виконати у вигляді матриці (фіг. 2). Входи схеми Рд1…Рд8 є рядками матриці, а входи Ст1…Ст8 - стовпцями матриці. Компонуваннях електричних зв'язків лазерних випромінювачів у матрицю запропоновано виключно з метою спрощення електричної схеми управління, оскільки при цьому використовується найменша кількість ліній зв'язку випромінювача 1 з блоком управління 12. Для матриці з 64 лазерних діодів необхідно 16 ліній зв'язку (8 для рядків і 8 для стовпців матриці). Як видно зі схеми електричної принципової (фіг. 3), зображена частина пристрою має в своєму складі багатоканальний лазерний випромінювач 1, контролер DD1, мікроконтролер 13 (на схемі електричній принциповій має позначення DD2), роз'єми ХР1, ХР2, ХР3 та ХР4, резистори R1-R24 та транзистори VT1-VT16. Контролер DD1 забезпечує зв'язок мікроконтролера DD2 з обчислювачем аберацій 11 через інтерфейс USB. Мікроконтролер DD2 реалізує алгоритм комутації лазерних діодів багатоканального лазерного випромінювача 1 шляхом подачі на їх входи електричних сигналів від мікроконтролера DD2. Резистори R1-R24 та транзистори VT1-VT16 призначені для узгодження рівня електричних сигналів комутатора. Через роз'єм ХР1 інтерфейсу USB, забезпечується зв'язок мікроконтролера DD2 і обчислювача аберацій 11. Роз'єм ХР2 є роз'ємом живлення схеми. Роз'єм ХР3 реалізує зв'язок мікроконтролера DD2 з позиційно-чутливим фотоприймачем 10. Роз'єм ХР4 забезпечує функцію запису програми у пам'ять мікроконтролера DD2. Від мікроконтролера DD2 на один з лазерних діодів у складі багатоканального лазерного випромінювача 1 надходить електричний сигнал - на рядок матриці Рд1 …Рд8 - високого рівня, а на стовпець матриці Ст1…Ст8 - низького. Послідовність, тривалість і рівень електричних сигналів визначається програмою, занесеною до пам'яті мікроконтролера DD2. Електричні сигнали створюють на лазерному випромінювачі різницю потенціалів, достатню для активації випромінювання, яке триває доти, доки зберігається відповідна різниця 2 UA 109513 U 5 10 15 20 25 30 35 40 45 50 55 потенціалів. Наприклад, мікроконтролер ATmega8, що має 23 лінії зв'язку, повністю забезпечує керування такою матрицею лазерних діодів. Для керування випромінюванням 128 чи 256 лазерних діодів використовують інші мікроконтролери, технічні характеристики яких відповідають поставленій задачі. Час експонування світлової плями на зіниці ока складає від 1 до 5 мс, а час підготовки до формування наступної експозиції - до 10 мкс. Загальний час зондування ока 6 у 64 точках становить не більше 300 мс. Зупинимося на окремих деталях роботи схеми. Вхідний сигнал, що подається на вхід мікроконтролера 13 (канал Input роз'єму ХР3), запускає виконання програми, записаної до внутрішньої пам'яті мікроконтролера 13. Ця програма забезпечує увімкнення лазерних діодів багатоканального лазерного випромінювача 1 у тій послідовності, яка необхідна для проведення зондування визначених ділянок ока, а також забезпечує узгодження в часі (синхронізацію) окремих лазерних випромінювачів блока 1, позиційно-чутливого фотоприймача 10 і обчислювача аберацій 11. У джерелі струму багатоканального лазерного випромінювача 1 у найпростішому варіанті на кожній лінії зв'язку між мікроконтролером 13 і рядками Рд1…Рд8 матриці діодів блока 1 може бути встановлений обмежуючий резистор. Однак, з метою уникнення перевищення навантажувальної здатності мікроконтролера 13 ми використовуємо транзисторні ключі VT1…VT16 на кожній лінії зв'язку мікроконтролера 13 з окремими лазерними випромінювачами з блока 1. Синхронізуючий сигнал у формі одиничного імпульсу напруги генерується мікроконтролером 13 при увімкненні кожного окремого лазерного випромінювача з блока 1. Через вихід Output роз'єму ХР3 сигнал синхроімпульсу подається на вхід позиційно-чутливого фотоприймача 10 для узгодження в часі спрацювання затвору фотоприймача 10 з включенням лазерного випромінювача блока 1. Цей самий синхронізуючий сигнал паралельно подається на вхід контролера DD1 через послідовний інтерфейс UART мікроконтролера 13 (виводи 23 і 24). Контролер DD1 (наприклад мікросхема СР2103 виробництва Silicon Labs) виконує перетворення інформаційного кадру стандарту UART, що надходить від мікроконтролера 13, в інформаційний кадр стандарту USB, який передається через роз'єм ХР1 на вхід обчислювача аберацій 11 для фіксації моменту часу включення кожного окремого лазерного випромінювача. При отриманні позиційно-чутливим фотоприймачем 10 синхронізуючого сигналу від мікроконтролера 13 починається процес накопичення сигналу від випромінювання, відбитого сітківкою ока 6. Після завершення цього процесу виконується вибірка отриманих даних і передача їх через інтерфейс до обчислювача аберацій 11. До кожної точки в площині зіниці ока лазерний промінь транспортується окремим оптоволокном. З конструктивних міркувань всі оптоволокна зібрані у циліндричний джгут, діаметр якого відповідає діаметру зіниці ока 6. Фіг. 4 подає зріз джгута. Кожне оптоволокно 14, що зазвичай виготовляється зі скла, кварцевого скла або полімерного світлопровідного матеріалу, вкрите лаковою або іншою світлонепроникною захисною оболонкою (ізоляцією) 15 та зафіксоване у джгуті кремнійорганічним компаундом 16 з низьким коефіцієнтом усадки (наприклад марки СІЕЛ). Розташування оптоволокон у джгуті таке, що кожен промінь, який виходить з нього, орієнтовано у напрямку зони в структурі ока 6, з якої має бути отримана інформація. В одному з конструктивних виконань корисної моделі діаметр джгута становить близько 6 мм. Діаметр оптоволокна у захисній оболонці становить 0,25 мм. Таким чином, у джгут діаметром 6 мм можна зібрати від 64 (як на фіг. 4) до 256 оптоволокон. Діаметр світловоду багатомодового оптоволокна складає від 0,05 мм до 0,0625 мм. Діаметр зондуючих променів на зіниці ока 6 буде близьким до діаметра оптоволокон. Фіг. 5 ілюструє хід зондуючого променя від вихідної оптики 4 крізь світлоподільник 5 і зіницю ока 6 до сітківки. Відбите сітківкою ока випромінювання через світлоподільники 5 та 7 спрямовується на об'єктив 9, який фокусує його в площину позиційно-чутливого фотоприймача 10. На фіг. 5 продемонстровано три випадки: А - еметропічного ока, Б - міопічного ока, В гіперметропічного ока. Для еметропічного ока зображення проекції лазерного променя на сітківці співпадатиме з точкою перетину сітківки Re зоровою віссю, тобто проходитиме через центр ямки жовтої плями (фовіоли). В цьому випадку позиційно-чутливий фотоприймач 10 зафіксує нульові значення рефракційної похибки δxe=0, δуе=0 (фіг. 5А). Для міопічного (фіг. 5Б) та гіперметропічного (фіг. 5В) ока лазерний промінь буде спроектованим на сітківку в точки Rm та Rh відповідно, віддалені від точки перетину сітківки зоровою віссю на відстані хm≠0, ym≠0 та xh≠0, yh≠0, що свідчить про те, що рефракційні похибки є відмінними від нуля, причому знаки цих відхилень для гіперметропічного й міопічного ока будуть протилежними. 3 UA 109513 U 5 10 Інформація про координати зображень світлових плям на сітківці ока 6, зафіксовані позиційно чутливим фотоприймачем 10, що спрямовується до обчислювача аберацій 11, використовується для розрахунку параметрів, які характеризують стан оптичної системи ока 6. Для цього можуть бути використані різні методи представлення хвильового фронту, такі як сплайн-інтерполяція або апроксимація за допомогою поліноміальних рядів, наприклад, з використанням поліномів Церніке. За результатами вимірювань може бути обчислений будьякий інший похідний параметр або функція, такі як, наприклад, функція розсіювання точки або/і модуляційна передавальна функція. Всі ці дані розраховуються і обробляються обчислювачем аберацій 11 та відображаються на дисплеї. Як обчислювач аберацій 11 може бути використаний як комп'ютер загального типу, так і спеціалізований обчислювач. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Пристрій для зондування ока людини, до складу якого входить лазерний блок, позиційно чутливий фотоприймач, блок орієнтації та акомодації ока, обчислювач аберацій та блок управління, електрично зв'язаний з лазерним блоком, з позиційно-чутливим фотоприймачем та з обчислювачем аберацій, який відрізняється тим, що лазерний блок виконано у вигляді багатоканального лазерного випромінювача, до його виходів через багатоканальну вхідну оптику приєднано багатоканальну оптично-волоконну лінію так, що кожне оптоволокно оптично зв'язане з відповідним йому окремим лазером багатоканального лазерного випромінювача, а на вихідному зрізі багатоканальної оптично-волоконної лінії встановлено багатоканальну вихідну оптику з функцією формування паралельного зондуючого пучка з виходу кожного оптоволокна паралельно до оптичної осі пристрою, причому до складу блока управління введено мікроконтролер, запрограмований так, щоб під час вимірювання у кожен момент часу випромінювали лише задані програмно окремі лазерні випромінювачі. 4 UA 109513 U 5 UA 109513 U 6 UA 109513 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори російськоюWakil Joe, Madala Sridhar
МПК / Мітки
МПК: A61B 3/10, A61B 3/103
Мітки: пристрій, людини, ока, зондування
Код посилання
<a href="https://ua.patents.su/9-109513-pristrijj-dlya-zonduvannya-oka-lyudini.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зондування ока людини</a>
Пристрій для оцінки стійкості і опороздатності людини
Номер патенту: 54139
Опубліковано: 15.09.2004
Автори: Василенко Ірина Миколаївна, Гадяцький Олександр Володимирович, Салєєва Антоніна Денисівна, Ковалько Микола Тимофійович, Роман Любов Костянтинівна, Малиняк Мирослав Іванович, Рибка Євген Васильович, Качер Володимир Семенович
МПК: A61B 5/103
Мітки: пристрій, людини, оцінки, опороздатності, стійкості
Формула / Реферат:
1. Пристрій для оцінки стійкості і опороздатності людини, що містить вимірювальну платформу, датчики силових сигналів, лазерний проектор та з'єднаний з ним електропривід, який відрізняється тим, що в нього введена друга вимірювальна платформа, блок керування та індикації, зарядний блок, комп'ютер та підключені до нього блок зв'язку, блок програмного забезпечення та варіатор лазерної площини, в якому встановлено контролер лазерної площини,...
Пристрій для багатофункціональної лазерної терапії
Номер патенту: 103511
Опубліковано: 25.12.2015
Автор: Забулонов Юрій Леонідович
МПК: A61H 39/00, A61N 5/00
Мітки: терапії, багатофункціональної, пристрій, лазерної
Формула / Реферат:
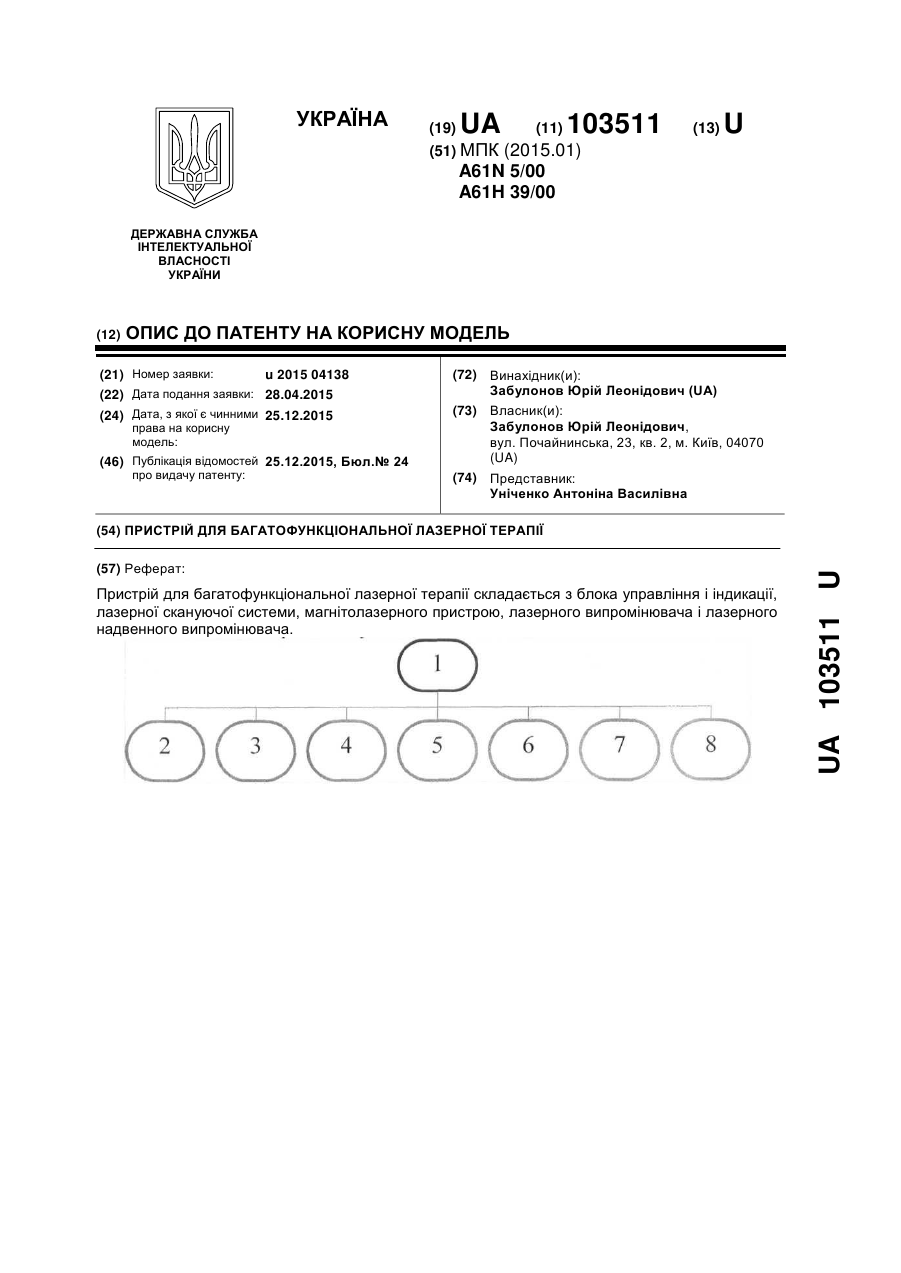
Пристрій для багатофункціональної лазерної терапії, який складається з блока управління і індикації, лазерної скануючої системи, магнітолазерного пристрою, лазерного випромінювача і лазерного надвенного випромінювача.
Пристрій для радіоакустичного зондування атмосфери
Номер патенту: 46150
Опубліковано: 15.05.2002
Автори: Бутакова Світлана Вікторівна, Бусловський Сергій Федорович, Ульянов Юрій Миколайович, Бєдін Віктор Савович
МПК: G01S 13/95
Мітки: пристрій, зондування, радіоакустичного, атмосфери
Формула / Реферат:
Пристрій для радіоакустичного зондування атмосфери, що містить комбіновану радіоакустичну антенну систему, розташовану на поверхні Землі, акустичний передавач і доплерівський радіолокатор, який містить антенний комутатор, імпульсний радіопередавач, радіоприймач, блок обробки інформації, до якого підключено індикатор метеовеличин, який відрізняється тим, що антенна система виконана у вигляді кільцевої антенної решітки з числом елементів,...
Пристрій для дуоденального зондування
Номер патенту: 14528
Опубліковано: 15.05.2006
Автори: Гайдуков В'ячеслав Анатолійович, Пішак Василь Павлович, Пішак Ольга Василівна
МПК: A61M 25/00
Мітки: дуоденального, зондування, пристрій
Формула / Реферат:
Пристрій для дуоденального зондування, що містить тонкий зонд та оливоподібний елемент, який відрізняється тим, що додатково введено функціональний блок, який складається з фіксатора, годинникового механізму та круга з пробірками таким чином, що хвилинна вісь годинникового механізму з'єднана із кругом, що робить один оберт за 1 годину, та по периметру якого закріплено 60 градуйованих пробірок на 5 мл.
Пристрій для астроспостережень на основі приладів дистанційного зондування землі
Номер патенту: 32156
Опубліковано: 12.05.2008
Автори: Ожінський Віктор Васильович, Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: B64G 1/36
Мітки: зондування, приладів, астроспостережень, основі, дистанційного, землі, пристрій
Формула / Реферат:
Пристрій для астроспостережень, який відрізняється тим, що як астровимірювальна система застосований прилад дистанційного зондування Землі та поворотне дзеркало, яке виконане з можливістю, шляхом переміщення, почергового проектування на чутливий елемент приладу підстилаючої поверхні Землі або зоряного неба, за інформацією з якого бортовим обчислювальним пристроєм проводиться визначення параметрів орієнтації космічного апарата.
Попередній патент: Бокове дзеркало заднього виду транспортного засобу
Наступний патент: Система підготовки та подачі води і добрив при краплинному зрошенні
Випадковий патент: Пристрій для розповсюдження носіїв рекламної інформації