Програмований засіб радіозв’язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки
Номер патенту: 112860
Опубліковано: 26.12.2016
Автори: Кувшинов Олексій Вікторович, Смоленко Людмила Василівна, Романенко Ігор Олександрович, Животовський Руслан Миколайович
Формула / Реферат
Програмований засіб радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що розташований на безпілотному авіаційному комплексі, який містить передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів, при цьому до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином перша приймальна антена, друга приймальна антена, блок визначення режиму роботи та отримувач даних, безпосередньо у передавальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів джерело даних з'єднано послідовно з блоком визначення режиму роботи, перший вихід блока визначення режиму роботи з'єднано з першою передавальною антеною першим каналом зв'язку з першого виходу зазначеного блока визначення режиму роботи, другий вихід блока визначення режиму роботи з'єднано з другою передавальною антеною другим каналом зв'язку з другого виходу зазначеного блока визначення режиму роботи, безпосередньо у приймальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів вихід першої приймальної антени з'єднано з першим входом отримувача даних третім каналом зв'язку через блок визначення режиму роботи, а саме, через його перші вхід та вихід, вихід другої приймальної антени з'єднано з другим входом отримувача даних четвертим каналом зв'язку через блок визначення режиму роботи, а саме, через його другі вхід та вихід, передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів з'єднано між собою радіоканалом, який відрізняється тим, що до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок прогнозування сигнально-завадової обстановки, блок формування сигналів з ортогональним частотним мультиплексуванням, блок формування сигналів з псевдовипадковою перестройкою робочої частоти, блок управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням та блок управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, до складу приймальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок просторово-часового декодування, блок приймання сигналів з псевдовипадковою перестройкою робочої частоти та блок приймання сигналів з ортогональним частотним мультиплексуванням.
Текст
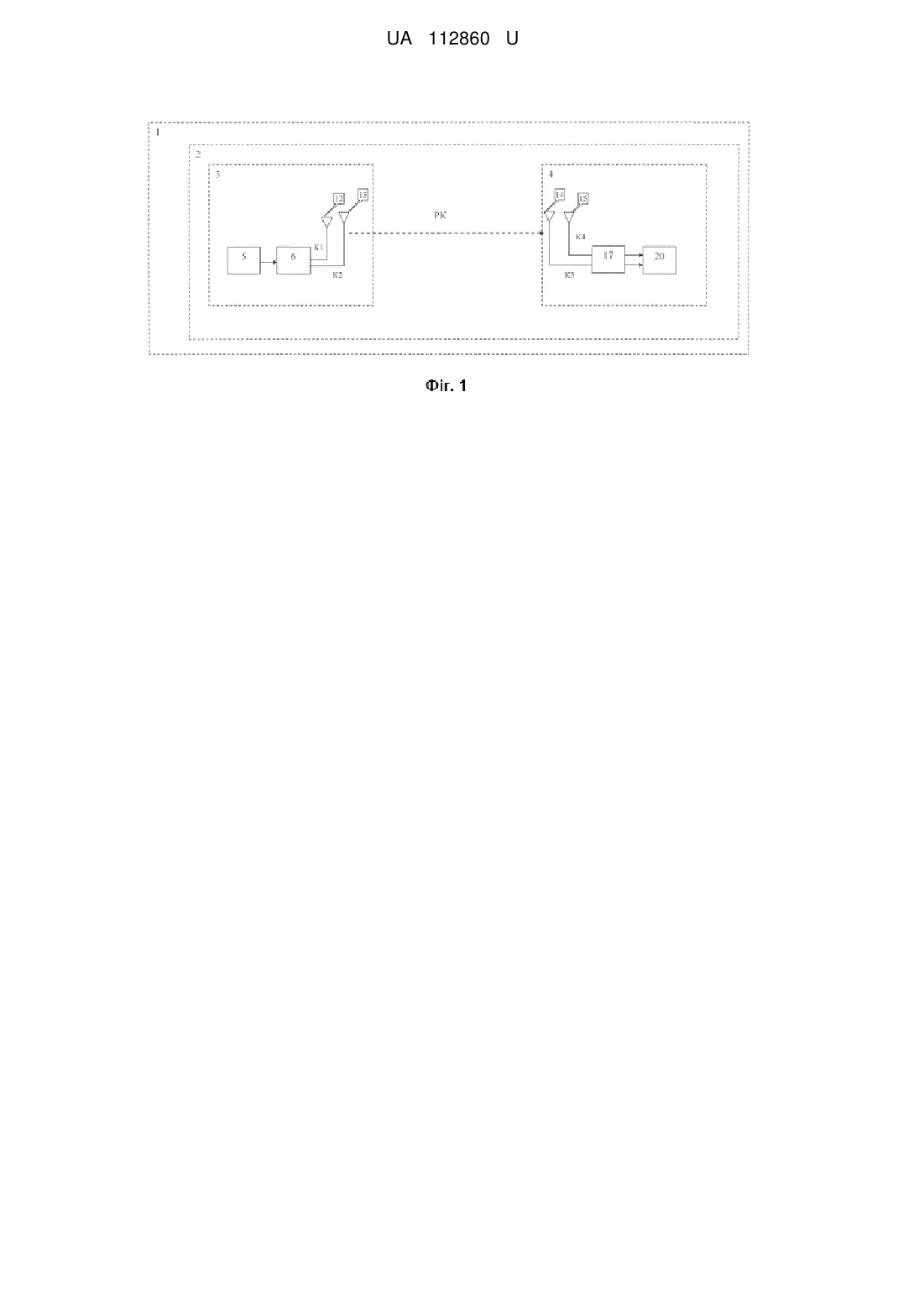
Реферат: Програмований засіб радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що розташований на безпілотному авіаційному комплексі, який містить передавальну частину програмованого засобу радіозв'язку та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів, джерело даних, першу передавальну антену та другу передавальну антену, першу приймальну антену, другу приймальну антену, блок визначення режиму роботи та отримувач даних, канали зв'язку. Додатково введено блок прогнозування сигнально-завадової обстановки, блок формування сигналів з ортогональним частотним мультиплексуванням, блок формування сигналів з псевдовипадковою перестройкою робочої частоти, блок управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням та блок управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, блок просторово-часового декодування, блок приймання сигналів з псевдовипадковою перестройкою робочої частоти та блок приймання сигналів з ортогональним частотним мультиплексуванням. UA 112860 U (12) UA 112860 U UA 112860 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі зв'язку, зокрема до систем зв'язку та систем забезпечення керування із застосуванням безпілотних літальних апаратів. Для безпілотних авіаційних комплексів суттєвим фактором є зниження ваги джерела живлення, тому для збільшення часу польоту, який визначається енергетичним ресурсом джерела живлення, потрібне максимальне зниження рівня випромінюваного сигналу при виконанні вимог до швидкості передачі інформації. Проте в умовах динамічної зміни сигнальнозавадової обстановки, постійної зміни відстані між абонентами для забезпечення стійкого зв'язку протягом тривалого часу треба слідкувати, щоб рівень прийнятого сигналу не знижувався до гранично допустимого рівня і збільшувати в цьому випадку потужність сигналу, випромінюваного передавачем. У випадку, коли рівня випромінюваного сигналу для підтримання стійкого зв'язку вже недостатньо, радіостанція повинна переходити на інший режим, який забезпечить більшу дальність розпізнавання сигналу, хоча це призводить до зниження пропускної здатності радіоканалу. Умови функціонування безпілотних авіаційних комплексів військового призначення характеризуються наявністю зон суцільного радіоелектронного подавления, в яких робота будь-яких засобів радіозв'язку просто не можлива. Виникає актуальна наукова задача виявлення та прогнозування радіоелектронної обстановки в районах виконання функціональних завдань безпілотних авіаційних комплексів. Відомий пристрій радіозв'язку для безпілотного авіаційного комплексу, що містить приймальну та передавальну частину, зв'язані між собою радіоканалом [1]. Недоліками пристрою радіозв'язку для безпілотного авіаційного комплексу є низька завадостійкість, недостатня кількість режимів роботи та відсутність можливості прогнозування сигнально-завадової обстановки. Найбільш близьким технічним рішенням як за суттю, так і задачею, що вирішується, яке вибрано за найближчий аналог (прототип), є програмована радіостанція, що містить передавальну частину радіостанції та приймальну частину радіостанції, при цьому до складу передавальної частини радіостанції входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу приймальної частини радіостанції входять з'єднані між собою відповідним чином перша приймальна антена, друга приймальна антена, блок визначення режиму роботи та отримувач даних, при цьому безпосередньо у передавальній частині радіостанції джерело даних з'єднано послідовно з блоком визначення режиму роботи, перший вихід блока визначення режиму роботи з'єднано з першою передавальною антеною першим каналом зв'язку з першого виходу зазначеного блока визначення режиму роботи, другий вихід блока визначення режиму роботи з'єднано з другою передавальною антеною другим каналом зв'язку з другого виходу зазначеного блока визначення режиму роботи, безпосередньо у приймальній частині радіостанції вихід першої приймальної антени з'єднано з першим входом отримувача даних третім каналом зв'язку через блок визначення режиму роботи, а саме, через його перші вхід та вихід, вихід другої приймальної антени з'єднано з другим входом отримувача даних четвертим каналом зв'язку через блок визначення режиму роботи, а саме, через його другі вхід та вихід, передавальну частину радіостанції та приймальну частину радіостанції з'єднано між собою радіоканалом [2]. Недоліком програмованої радіостанції, яку вибрано за найближчий аналог (прототип), є низька ефективність використання радіочастотного ресурсу, відсутність адаптації параметрів радіостанції до сигнально-завадової обстановки та відсутність властивості здійснювати прогнозування сигнально-завадової обстановки в районі виконання завдання. В основу корисної моделі поставлено задачу шляхом додаткового введення до складу програмованого засобу радіозв'язку для безпілотних авіаційних комплексів блока формування сигналів з ортогональної частотним мультиплексуванням, блока формування сигналів з псевдовипадковою перестройкою робочої частоти, блока управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням, блока управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, блока просторово-часового кодування, блока просторово-часового декодування, блока приймання сигналів з ортогональним частотним мультиплексуванням, блока приймання сигналів з псевдовипадковою перестройкою робочої частоти, блока прогнозування завадової обстановки забезпечити підвищення завадостійкості, забезпечити можливість прогнозування сигнально-завадової обстановки, розширити кількість режимів роботи, забезпечити підвищення ефективності використання радіочастотного ресурсу та забезпечити можливість адаптації параметрів програмованого засобу радіозв'язку для безпілотних авіаційних комплексів до сигнально-завадової обстановки. 1 UA 112860 U 5 10 15 20 25 30 35 40 45 50 55 60 Поставлена задача вирішується тим, що в програмованому засобі радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що містить передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів, при цьому до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином перша приймальна антена, друга приймальна антена, блок визначення режиму роботи та отримувач даних, безпосередньо у передавальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів джерело даних з'єднано послідовно з блоком визначення режиму роботи, перший вихід блока визначення режиму роботи з'єднано з першою передавальною антеною першим каналом зв'язку з першого виходу зазначеного блока визначення режиму роботи, другий вихід блока визначення режиму роботи з'єднано з другою передавальною антеною другим каналом зв'язку з другого виходу зазначеного блока визначення режиму роботи, безпосередньо у приймальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів вихід першої приймальної антени з'єднано з першим входом отримувача даних третім каналом зв'язку через блок визначення режиму роботи, а саме, через його перші вхід та вихід, вихід другої приймальної антени з'єднано з другим входом отримувача даних четвертим каналом зв'язку через блок визначення режиму роботи, а саме, через його другі вхід та вихід, передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів з'єднано між собою радіоканалом, згідно з корисною моделлю, до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок прогнозування сигнально-завадової обстановки, блок формування сигналів з ортогональним частотним мультиплексуванням, блок формування сигналів з псевдовипадковою перестройкою робочої частоти, блок управління сигнальнокодовою конструкцією сигналів з ортогональним частотним мультиплексуванням та блок управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, до складу приймальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок просторово-часового декодування, блок приймання сигналів з псевдовипадковою перестройкою робочої частоти та блок приймання сигналів з ортогональним частотним мультиплексуванням, при цьому вихід блока прогнозування сигнально-завадової обстановки з'єднано з другим входом блока визначення режиму роботи, блок формування сигналів з ортогональним частотним мультиплексуванням розміщено в першому каналі зв'язку так, що його перший вхід з'єднано з першим виходом блока визначення режиму роботи, блок формування сигналів з псевдовипадковою перестройкою робочої частоти розміщено в другому каналі зв'язку так, що його перший вхід з'єднано з другим виходом блока визначення режиму роботи, вихід блока управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням з'єднано з другим входом блока формування сигналів з ортогональним частотним мультиплексуванням, вихід блока управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти з'єднано з другим входом блока формування сигналів з псевдовипадковою перестройкою робочої частоти, блок просторово-часового кодування встановлено в першому та другому каналах зв'язку так, що вихід блока формування сигналів з ортогональним частотним мультиплексуванням з'єднано з першим входом блока просторово-часового кодування, а вихід блока формування сигналів з псевдовипадковою перестройкою робочої частоти з'єднано з другим входом блока просторово-часового кодування, перший вихід блока просторово-часового кодування з'єднано з першою передавальною антеною першим (К1) каналом зв'язку, другий вихід блока просторово-часового кодування з'єднано з другою передавальною антеною другим (К2) каналом зв'язку, блок просторово-часового декодування встановлено в третьому (КЗ) та четвертому (К4) каналах зв'язку так, що першу приймальну антену з'єднано з першим його входом, а другу приймальну антену з'єднано з другим його входом, блок приймання сигналів з псевдовипадковою перестройкою робочої частоти встановлено у третьому каналі зв'язку між блоком визначення режиму роботи та отримувачем даних, блок приймання сигналів з ортогональним частотним мультиплексуванням встановлено в четвертому каналі зв'язку між блоком визначення режиму роботи та отримувачем даних, перший вихід блока просторовочасового декодування з'єднано з входом блока приймання сигналів з псевдовипадковою перестройкою робочої частоти через блок визначення режиму роботи, а саме, через, 2 UA 112860 U 5 10 15 20 25 30 35 40 45 50 55 60 відповідно, його перші вхід і вихід, другий вихід блока просторово-часового декодування з'єднано з входом блока приймання сигналів з ортогональним частотним мультиплексуванням через блок визначення режиму роботи, а саме, через, відповідно, його другі вхід і вихід, вихід блока приймання сигналів з псевдовипадковою перестройкою робочої частоти з'єднано з першим входом отримувача даних третім каналом зв'язку, вихід блока приймання сигналів з ортогональним частотним мультиплексуванням з'єднано з другим входом отримувача даних четвертим каналом зв'язку. Рішення технічної задачі в програмованому засобі радіозв'язку для безпілотних авіаційних комплексів (що заявляється), дійсно можливе тому, що: введення блока прогнозування сигнально-завадової обстановки дозволить здійснювати за допомогою псевдоградієнтного оцінювання квантилів сигналу прогнозування стану каналів управління і зв'язку та корегувати маршрут руху безпілотного авіаційного комплексу, уникаючи зони суцільного радіоелектронного подавлення; введення блока визначення режиму роботи дозволяє визначити в залежності від ресурсів системи та сигнально-завадової обстановки режим роботи програмованого засобу радіозв'язку для безпілотних авіаційних комплексів. Правило вибору ґрунтується на наступному: при необхідності забезпечити максимальну перепускну здатність пристрою радіозв'язку для безпілотного авіаційного комплексу вибирається режим роботи з ортогональним частотним мультиплексуванням, а при необхідності забезпечення максимальної завадозахищеності в складній завадовій обстановці вибирається режим роботи з псевдовипадковою перестройкою робочої частоти; введення блока формування сигналів з ортогональної частотним мультиплексуванням дозволяє сформувати сигнали з ортогональним частотним мультиплексуванням на підставі інформації з блока управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням та дозволить підвищити частотну ефективність програмованого засобу радіозв'язку для безпілотного авіаційного комплексу; введення блока формування сигналів з псевдовипадковою перестройкою робочої частоти дозволяє сформувати сигнали з псевдовипадковою перестройкою частоти на підставі інформації з блока управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти та дозволить підвищити енергетичну ефективність програмованого засобу радіозв'язку для безпілотних авіаційних комплексів; введення блока управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням дозволяє визначити в залежності від стану сигнальнозавадової обстановки та ресурсів системи оптимальну сигнально-кодову конструкцію з максимізацією частотної та енергетичної ефективності програмованого засобу радіозв'язку для безпілотних авіаційних комплексів для режиму ортогональної частотної маніпуляції; введення блока управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти дозволяє визначити в залежності від стану сигнально-завадової обстановки та ресурсів системи оптимальну сигнально-кодову конструкцію з максимізацією частотної та енергетичної ефективності програмованого засобу радіозв'язку для безпілотних авіаційних комплексів для режиму псевдовипадкової перестройки робочої частоти; введення блока просторово-часового кодування дозволяє визначити оптимальну кількість передавальних антен та напрямки передачі сигналів. Суть корисної моделі пояснюється за допомогою креслень, де на Фіг. 1 показано блок-схему програмованої радіостанції, яку вибрано за прототип, на Фіг. 2 показано блок-схему програмованого засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що заявляється. Безпілотний 1 авіаційний комплекс, на якому встановлений програмований 2 засіб радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що заявляється, містить (див. блок-схему на Фіг. 2) передавальну 3 частину програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, приймальну 4 частину програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки. Конструктивно і технологічно до складу передавальної 3 частини програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки входять з'єднані між собою відповідним чином джерело 5 даних, блок 6 визначення режиму роботи, блок 7 прогнозування сигнально-завадової обстановки, блок 8 формування сигналів з ортогональної частотним мультиплексуванням, блок 9 формування сигналів з псевдовипадковою перестройкою робочої частоти, блок 10 управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням, блок 11 управління 3 UA 112860 U 5 10 15 20 25 30 35 40 45 50 55 60 сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, блок 12 просторово-часового кодування, першу 13 передавальну антену, другу 14 передавальну антену. При цьому безпосередньо у передавальній 3 частині програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозування завадової обстановки його конструктивні елементи з'єднано між собою таким чином: джерело 5 даних з'єднано послідовно з першим входом блока 6 визначення режиму роботи; вихід блока 7 прогнозування сигнально-завадової обстановки з'єднано з другим входом блока 6 визначення режиму роботи; блок 6 визначення режиму роботи з'єднаний з блоком 8 формування сигналів з ортогональним частотним мультиплексуванням та блоком 9 формування сигналів з псевдовипадковою перестройкою робочої частоти; вихід блока 10 управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням з'єднано з блоком 8 формування сигналів з ортогональної частотним мультиплексуванням; вихід блока 11 управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти з'єднано з блоком 9 формування сигналів з псевдовипадковою перестройкою робочої частоти; вихід блока 9 формування сигналів з псевдовипадковою перестройкою робочої частоти та вихід блока 8 формування сигналів з ортогональної частотним мультиплексуванням з'єднані з входом блока 12 просторово-часового кодування; перший вихід блока 12 просторово-часового кодування з'єднано з входом першої 13 передавальної антени першим (К1) каналом зв'язку з першого виходу зазначеного блока 12 просторово-часового кодування; другий вихід блока 12 просторово-часового кодування з'єднано з входом другої 14 передавальної антени другим (К2) каналом зв'язку з другого виходу блока 12 просторовочасового кодування. Конструктивно і технологічно до складу приймальної 4 частини програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки входять з'єднані між собою відповідним чином перша 15 приймальна антена, друга 16 приймальна антена, блок 17 просторово-часового декодування, блок 18 визначення режиму роботи, блок 19 приймання сигналів з псевдовипадковою перестройкою робочої частоти, блок 20 приймання сигналів з ортогональним частотним мультиплексуванням та отримувач 21 даних. При цьому безпосередньо у приймальній 4 частині програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки її конструктивні елементи з'єднано між собою таким чином: вихід першої 15 приймальної антени з'єднано з блоком 17 просторово-часового декодування третім (К3) каналом зв'язку; вихід другої 16 приймальної антени з'єднано з блоком 17 просторово-часового декодування четвертим (К4) каналом зв'язку; вихід блока 17 просторово-часового декодування з'єднано з входом блока 18 визначення режиму роботи; вихід блока 18 визначення режиму роботи з'єднано з входом блока 19 приймання сигналів з псевдовипадковою перестройкою робочої частоти; вихід блока 18 визначення режиму роботи з'єднано з входом блока 20 приймання сигналів з ортогональним частотним мультиплексуванням; вихід блока 20 приймання сигналів з ортогональним частотним мультиплексуванням та вихід блока 19 приймання сигналів з псевдовипадковою перестройкою робочої частоти з'єднано з входом отримувача 21 даних. Програмований 2 засіб радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки (що заявляється), працює таким чином. Для передачі інформація з передавальної 3 частини програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки від джерела 5 даних надходить (з його виходу) на блок 6 визначення режиму роботи, який визначає в залежності від ресурсів системи, сигнально-завадової обстановки та прогнозованої сигнальнозавадової обстановки, що надходить з виходу блока 7 прогнозування сигнально-завадової обстановки режим роботи програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки. Принцип роботи блока 7 прогнозування сигнально-завадової обстановки заснований на динамічному оцінюванні квантилів сигналу та визначення (прогнозування) майбутніх значень параметрів завад, що виникають у каналі. 4 UA 112860 U 5 10 15 20 25 30 35 40 45 50 55 60 Зазначена інформація про майбутній стан каналу використовується при вибору оптимального режиму роботи та при прокладанні маршруту в районі виконання завдань. Правило вибору режиму роботи ґрунтується на наступному: при необхідності забезпечити максимальну перепускну здатність радіостанції вибирається режим роботи з ортогональним частотним мультиплексуванням, а при необхідності забезпечення максимальної завадозахищеності в складній завадовій обстановці вибирається режим роботи з псевдовипадковою перестройкою робочої частоти. Далі інформаційна послідовність з виходу блока 6 визначення режиму роботи надходить на вхід блока 8 формування сигналів з ортогональної частотним мультиплексуванням, який формує сигнали з ортогональною частотною мультиплексуванням на підставі інформації з блока 10 управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням. У разі передачі інформації з псевдовипадковою перестройкою робочої частоти інформаційна послідовність з виходу блока 6 визначення режиму роботи надходить на вхід блока 9 формування сигналів з псевдовипадковою перестройкою робочої частоти, що формує сигнали з псевдовипадковою перестройкою частоти на підставі інформації з блока 11 управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти. Для управління роботою блока 8 формування сигналів з ортогональної частотним мультиплексуванням на його вхід надходить керуюча послідовність з блока 10 управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням, що визначає в залежності від стану сигнальнозавадової обстановки та ресурсів системи оптимальну сигнально-кодову конструкцію з максимізацією частотної та енергетичної ефективності програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки для режиму ортогональної частотної маніпуляції. Здійснюється наступна послідовність дій: введення вихідних даних; вибір кількості піднесучих; вибір структури ансамблю сигналів; визначення складності реалізації; оцінка передатної характеристики каналу зв'язку; перетворення каналу з міжсимвольними спотвореннями в сукупність гаусівських каналів без пам'яті; визначення середньої потужності сигналу на виході підканалу; розрахунок максимальної швидкості передачі в кожному підканалі; визначення максимальної швидкості передачі групового сигналу; оптимізація розглянутого варіанта по швидкості при обмеженій середній потужності сигналу на вході каналу; вибір коригуючого коду; вибір маніпуляційного коду. У разі використання сигналів з псевдовипадковою перестройкою робочої частоти на вхід блока 9 формування сигналів з псевдовипадковою перестройкою робочої частоти надходить керуюча послідовність з виходу блока 11 управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, що визначає в залежності від стану сигнально-завадової обстановки та ресурсів системи оптимальну сигнально-кодову конструкцію з максимізацією частотної та енергетичної ефективності радіостанції для режиму псевдовипадкової перестройки робочої частоти. Здійснюється наступна послідовність дій: на підставі параметрів радіозасобів та каналу зв'язку, а також значення допустимої величини коефіцієнта завадозахищеності радіозасобів вибирається розмірність ансамблю сигналів; здійснюється передача тестової послідовності, формується частотно-часова матриця; визначається швидкість стрибків, здійснюється вибір розмірності ансамблю сигнально-кодових конструкцій - вибирається розмірність ансамблю сигналів з завчасно відомих варіантів, а саме: одномірних, двомірних та багатомірних сигналів, вибір структури ансамблю сигнально-кодової конструкції; здійснюється передача тестової послідовності; вибирається вид коригуючого коду; вибирається вид маніпуляційного коду. При узгодженні кодеку двійкового завадостійкого коду і модему багатопозиційних сигналів, необхідно використати маніпуляційний код, при якому більшому розгляду по Хемінгу між кодовими комбінаціями відповідає більша відстань по Евкліду між сигналами, що відповідають їм; передача тестової послідовності; визначається тип завади; перевіряється виконання вимог по забезпеченню завадозахищеності радіозасобів. Оптимальні параметри сигнально-кодових конструкцій визначаються для випадку передачі інформації по каналу зв'язку в умовах впливу різних видів навмисних завад. Параметри сигнально-кодової конструкції для конкретної завадової обстановки визначаються з кінцевого числа допустимих варіантів, що дозволяє спростити практичну реалізацію модемного обладнання радіозасобів. Далі сигнал з виходу блока 8 формування сигналів з ортогональної частотним мультиплексуванням або з виходу блока 9 формування сигналів з псевдовипадковою перестройкою робочої частоти надходить на вхід блока 12 просторово-часового кодування, що визначає оптимальну кількість передавальних антен та напрямки передачі сигналів. Сигнал з виходу блока 12 просторово-часового кодування надходить на вхід першої 13 передавальної антени через перший (К1) канал зв'язку та другої 14 передавальної антени через другий (К2) канал зв'язку. 5 UA 112860 U 5 10 15 20 25 30 35 40 Далі в приймальній 4 частині програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки здійснюється послідовність (серія) зворотних перетворень. Інформація з передавальної 3 частини програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки (що заявляється) надходить на першу прийомну 15 антену та другу 16 прийомну антену. З виходу першої 15 прийомної антени через третій (К3) канал зв'язку та другої 16 прийомної антени через четвертий (К4) канал зв'язку сигнал надходить на вхід блока 17 просторово-часового декодування, що на підставі прийнятої інформації з першої 15 приймальної антени та другої 16 приймальної антени здійснює об'єднання прийнятої інформації в один інформаційний потік та фільтрацію сигналів з низькою якістю. Далі (в приймальній 3 частині програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки - див. блок-схему на Фіг. 2) інформація з виходу блока 17 просторово-часового декодування надходить на вхід блока 18 визначення режиму роботи, що по формі прийнятого сигналу визначає режим роботи приймача програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки. З виходу блока 18 визначення режиму роботи інформаційна послідовність надходить на вхід блока 19 приймання сигналів з псевдовипадковою перестройкою робочої частоти, де здійснюється приймання та обробка інформації з псевдовипадковою перестройкою робочої частоти. У разі режиму роботи з ортогональним частотним мультиплексуванням інформаційна послідовність з виходу блока 18 визначення режиму роботи надходить на вхід блока 20 приймання сигналів з ортогональним частотним мультиплексуванням, де здійснюється приймання та обробка сигналів з ортогональним частотним мультиплексуванням. Інформаційна послідовність з виходу блока 19 приймання сигналів з псевдовипадковою перестройкою робочої частоти або з блока 20 приймання сигналів з ортогональним частотним мультиплексуванням надходить на вхід отримувача 21 даних. Забезпечення можливості підвищення завадостійкості, прогнозування сигнально-завадової обстановки, розширення кількості режимів роботи, забезпечення підвищення ефективності використання радіочастотного ресурсу та забезпечення можливості адаптації параметрів до сигнально-завадової обстановки програмованого 2 засобу радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки (що заявляється), досягається за рахунок введення блока визначення режиму роботи, блока прогнозування сигнально-завадової обстановки, блока формування сигналів з ортогональної частотним мультиплексуванням, блока формування сигналів з псевдовипадковою перестройкою робочої частоти, блока управління сигнально-кодовою конструкцією сигналів з ортогональним частотним мультиплексуванням, блока управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, блока просторово-часового кодування. Джерела інформації: 1. http://army-news.ru/2014/12/bortovaya-apparatura-dlya-bespilotnyx-aviacionnyx-kompleksov/ аналог. 2. http://pentagonus.ru/pub 1/2 SDR - революция - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 60 Програмований засіб радіозв'язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки, що розташований на безпілотному авіаційному комплексі, який містить передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів, при цьому до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу програмованого засобу радіозв'язку для безпілотних авіаційних комплексів входять з'єднані між собою відповідним чином перша приймальна антена, друга приймальна антена, блок визначення режиму роботи та отримувач даних, безпосередньо у передавальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів джерело даних з'єднано послідовно з блоком визначення режиму роботи, перший вихід блока визначення режиму роботи з'єднано з першою передавальною антеною першим каналом зв'язку з першого виходу зазначеного блока визначення режиму роботи, другий вихід блока визначення режиму роботи з'єднано з другою передавальною антеною другим каналом зв'язку з другого виходу зазначеного блока визначення режиму роботи, безпосередньо у 6 UA 112860 U 5 10 15 приймальній частині програмованого засобу радіозв'язку для безпілотних авіаційних комплексів вихід першої приймальної антени з'єднано з першим входом отримувача даних третім каналом зв'язку через блок визначення режиму роботи, а саме, через його перші вхід та вихід, вихід другої приймальної антени з'єднано з другим входом отримувача даних четвертим каналом зв'язку через блок визначення режиму роботи, а саме, через його другі вхід та вихід, передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів з'єднано між собою радіоканалом, який відрізняється тим, що до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок прогнозування сигнально-завадової обстановки, блок формування сигналів з ортогональним частотним мультиплексуванням, блок формування сигналів з псевдовипадковою перестройкою робочої частоти, блок управління сигнальнокодовою конструкцією сигналів з ортогональним частотним мультиплексуванням та блок управління сигнально-кодовою конструкцією сигналів з псевдовипадковою перестройкою робочої частоти, до складу приймальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів додатково введено блок просторово-часового декодування, блок приймання сигналів з псевдовипадковою перестройкою робочої частоти та блок приймання сигналів з ортогональним частотним мультиплексуванням. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G11B 15/00, H04B 3/60, H04J 1/00
Мітки: обстановки, засіб, авіаційних, програмований, радіозв'язку, прогнозуванням, комплексів, безпілотних, завадової
Код посилання
<a href="https://ua.patents.su/9-112860-programovanijj-zasib-radiozvyazku-dlya-bezpilotnikh-aviacijjnikh-kompleksiv-z-prognozuvannyam-zavadovo-obstanovki.html" target="_blank" rel="follow" title="База патентів України">Програмований засіб радіозв’язку для безпілотних авіаційних комплексів з прогнозуванням завадової обстановки</a>
Програмований засіб радіозв’язку для безпілотних авіаційних комплексів
Номер патенту: 112705
Опубліковано: 26.12.2016
Автори: Кувшинов Олексій Вікторович, Смоленко Людмила Василівна, Романенко Ігор Олександрович, Хріщук Катерина Юріївна, Животовський Руслан Миколайович
МПК: H04J 1/00, G11B 15/00, H04B 3/60
Мітки: комплексів, безпілотних, програмований, радіозв'язку, авіаційних, засіб
Формула / Реферат:
Програмований засіб радіозв'язку для безпілотних авіаційних комплексів, що розташований на безпілотному авіаційному комплексі, який містить передавальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів та приймальну частину програмованого засобу радіозв'язку для безпілотних авіаційних комплексів, при цьому до складу передавальної частини програмованого засобу радіозв'язку для безпілотних авіаційних комплексів...
Програмована радіостанція з прогнозуванням завадової обстановки
Номер патенту: 107191
Опубліковано: 25.05.2016
Автори: Жук Павло Васильович, Голуб Віктор Анатолійович, Шишацький Андрій Володимирович, Кривенко Олександр Володимирович, Кувшинов Олексій Вікторович, Жук Олеся Геннадіївна
Мітки: прогнозуванням, радіостанція, завадової, обстановки, програмована
Формула / Реферат:
Програмована радіостанція з прогнозуванням завадової обстановки, що містить передавальну частину радіостанції та приймальну частину радіостанції, при цьому до складу передавальної частини радіостанції входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу приймальної частини радіостанції входять з'єднані між собою відповідним чином перша...
Програмована радіостанція з прогнозуванням завадової обстановки
Номер патенту: 107001
Опубліковано: 10.05.2016
Автори: Кувшинов Олексій Вікторович, Бєляков Роберт Олегович, Гурський Тарас Григорович, Шишацький Андрій Володимирович, Романюк Валерій Антонович, Голуб Віктор Анатолійович, Сальнікова Ольга Федорівна
Мітки: програмована, завадової, радіостанція, прогнозуванням, обстановки
Формула / Реферат:
Програмована радіостанція з прогнозуванням завадової обстановки, що містить передавальну частину радіостанції та приймальну частину радіостанції, причому до складу передавальної частини радіостанції входять з'єднані між собою відповідним чином джерело даних, блок визначення режиму роботи, перша передавальна антена та друга передавальна антена, до складу приймальної частини радіостанції входять з'єднані між собою відповідним чином перша...
Система знищення/ураження повітряних та наземних цілей типу безпілотних літальних апаратів, безпілотних авіаційних комплексів та наземних пунктів управління безпілотними літальними апаратами
Номер патенту: 62829
Опубліковано: 12.09.2011
Автори: Гладуш Ігор Вікторович, Башинський Володимир Георгійович, Василенко Олександр Васильович, Гудима Олег Петрович, Чернозуб Валерій Петрович, Мельников Павло Якович, Архипов Микола Іванович, Новіков Сергій Сергійович, Романенко Ігор Олександрович, Гусак Юрій Аркадійович, Кузнецов Владлен Олександрович, Федорук Петро Іванович
МПК: F41H 11/04, F41H 11/02, B64C 31/00
Мітки: пунктів, система, літальних, типу, авіаційних, безпілотними, управління, цілей, апаратів, літальними, повітряних, апаратами, комплексів, безпілотних, наземних
Формула / Реферат:
1. Система знищення/ураження повітряних та наземних цілей типу безпілотних літальних апаратів, безпілотних авіаційних комплексів та наземних пунктів управління безпілотними літальними апаратами, що містить підсистему розвідки/виявлення та розпізнавання повітряних цілей, центральний командний пункт Сухопутних військ, активні засоби протиповітряної оборони типу ракетних і артилерійських комплексів, включаючи вертольоти армійської авіації,...
Система знищення/ураження повітряних, наземних, надводних та підводних цілей типу безпілотних авіаційних комплексів, безпілотних літальних апаратів, наземних пунктів управління безпілотними літальними апаратами
Номер патенту: 77127
Опубліковано: 25.01.2013
Автори: Романенко Ігор Олександрович, Туренко Сергій Михайлович, Расстригін Олександр Олексійович, Гудима Олег Петрович, Башинський Володимир Георгійович, Кузнецов Владлен Олександрович, Мітрахович Михайло Михайлович, Гордієвський Олексій Тихонович, Комаров Володимир Олександрович, Архипов Микола Іванович, Гусак Юрій Аркадійович, Альошин Олександр Михайлович
МПК: B64C 31/00, F41H 11/02
Мітки: літальних, наземних, повітряних, типу, надводних, пунктів, цілей, апаратів, комплексів, безпілотними, система, управління, безпілотних, літальними, авіаційних, підводних, апаратами
Формула / Реферат:
1. Система знищення/ураження повітряних, наземних, надводних та підводних цілей типу безпілотних авіаційних комплексів, безпілотних літальних апаратів, наземних пунктів управління безпілотними літальними апаратами, малорозмірних ненаселених надводних та підводних апаратів, що містить підсистему розвідки/виявлення та розпізнавання повітряних, наземних, надводних і підводних цілей, центральний командний пункт Сухопутних військ та активні...
Попередній патент: Фітотерапевтичний засіб “сироп холофіт”
Наступний патент: Спосіб вирощування сорго цукрового для виробництва біоетанолу в умовах південно-західного лісостепу україни
Випадковий патент: Спосіб контролю герметичності з'єднань трубопроводів конструкцій