Корабельна візуально-оптична система націлювання наводимої вручну зенітної ракети, оснащеної головкою самонаведення
Номер патенту: 34215
Опубліковано: 15.02.2001
Автори: Борисюк Анатолій Олексійович, Чабаненко Павел Павлович, Семенов Сергій Дмитрович
Текст
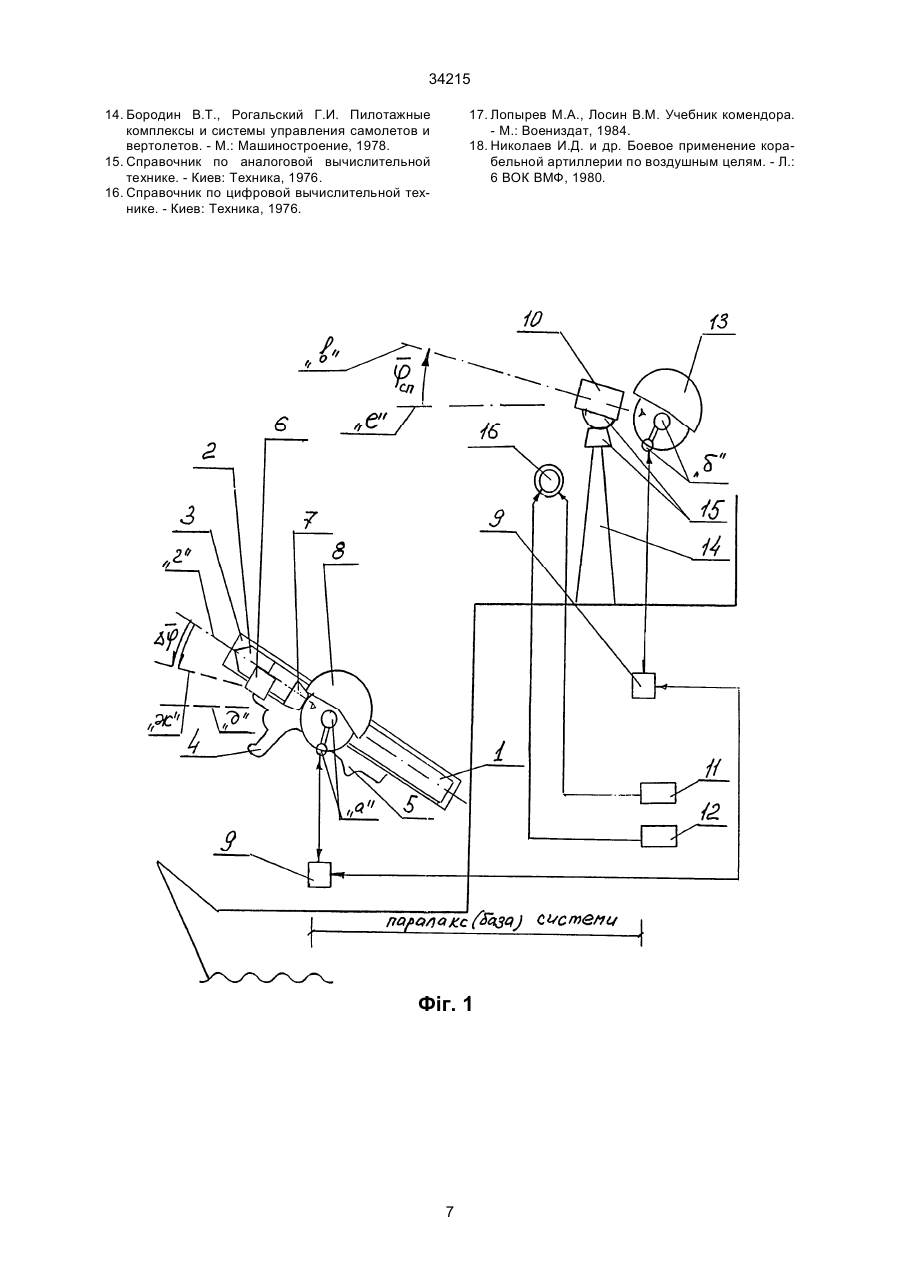
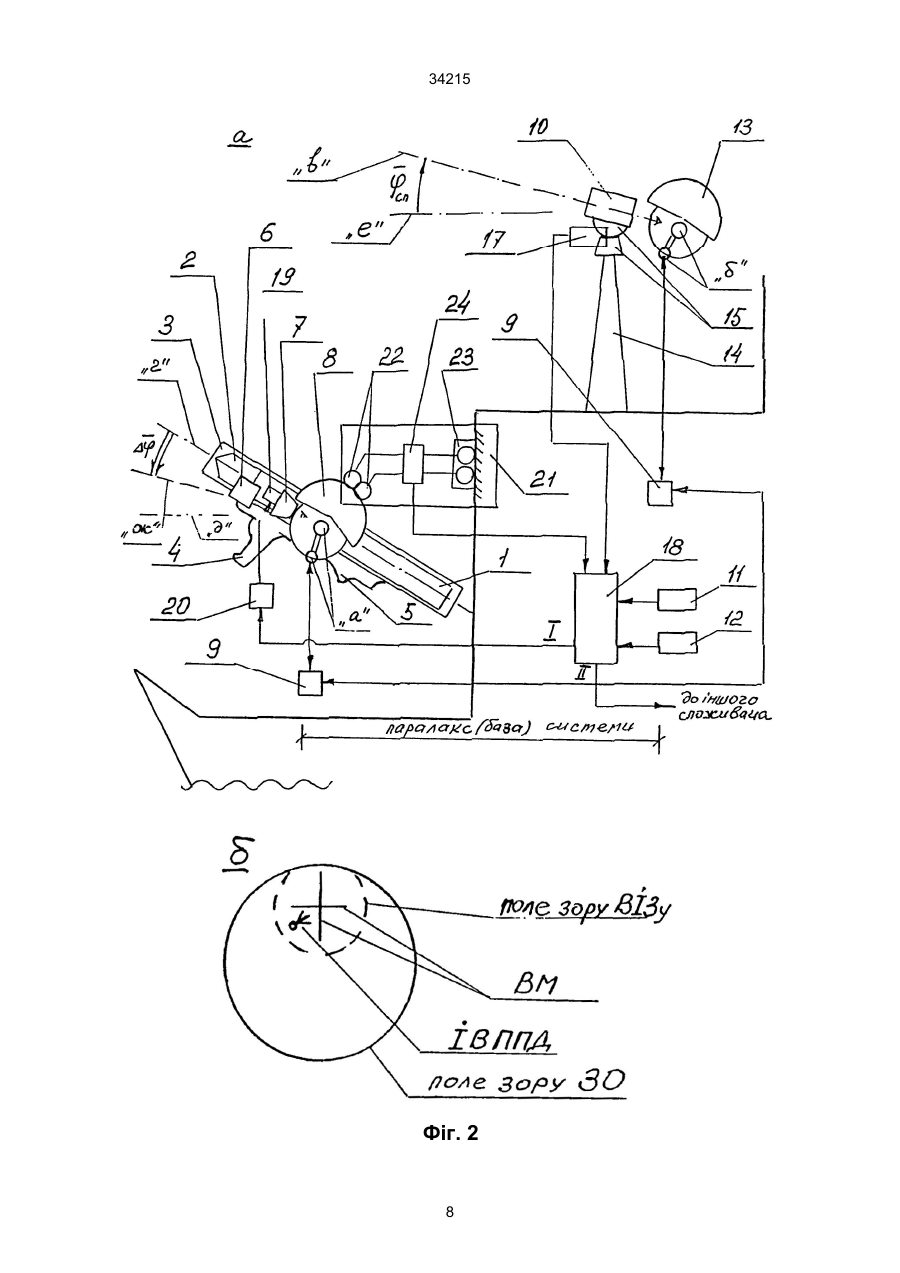
1. Корабельна візуально-оптична система націлювання наводимої вручну зенітної ракети, оснащеної головкою самонаведення, розміщеної в спорядженому пусковим механізмом транспортно-пусковому контейнері, що утримується на плечі стрілка-зенітника, на наголів’ї якого закріплені захисні окуляри, котра містить розташований на пусковому механізмі прицільний пристрій, оптичний оглядовопошуковий прилад спостерігача, канал зв'язку між спостерігачем і стрілком-зенітником, а також креномір та диферентомір, яка відрізняється тим, що захисні окуляри споряджені додатково введеним візирно-індикаторним засобом, який містить формувач зображення візирної мітки та індексавказувача потрібного просторового довороту і підключену до нього схему керування, при цьому до її складу додатково введений вимірювач просторового положення візирної мітки в корабельній системі координат і вузол визначення поправок, при цьому вихід останнього ввімкнений на вхід схеми керування візирно-індикаторного засобу, а входи його ввімкнені до виходів креноміра та диферентоміра і до виходу додатково введеного давача просторового положення оптичної осі оглядово A (54) КОРАБЕЛЬНА ВІЗУАЛЬНО-ОПТИЧНА СИСТЕМА НАЦІЛЮВАННЯ НАВОДИМОЇ ВРУЧНУ ЗЕНІТНОЇ РАКЕТИ, ОСНАЩЕНОЇ ГОЛОВКОЮ САМОНАВЕДЕННЯ 34215 тулуба з ТПК, ПМ на плечі націлює ЗР, тобто наводить поле захвату її ГСН на виявлену візуальну ціль. Для забезпечення зовнішнього цілевказування до складу корабельної візуально-оптичної системи цілевказування-націлювання входить візуальний оптичний оглядово-пошуковий прилад (ООПП) спостерігача, наприклад, бінокль або труба (типу ТЗК - труба зорова командирська). Остання може бути змонтована у поворотній обоймі на колонці і споряджена вказувачами (шкалами) кута місця і азимута (пеленга). Робоче місце спостерігача і робоче місце СЗ з'єднані між собою корабельним переговорним устаткуванням (КПУ), крізь яке проходить інформація про виявлені цілі, данні по цілевказуванню, підтвердження про націлювання і таке інше. Взаємодії між компонентами відомої корабельної візуально-оптичної системи цілевказування-націлювання наводимої вручну ЗР, оснащеної ГСН, і функціонування її в основних рисах можуть бути описані таким чином. І спостерігач і СЗ здійснюють огляд повітряної обставини в призначених секторах (зонах) відповідальності, межи яких означені якимось чином (скажімо, в кутах відносно площини палуби та відносно діаметральної площини (ДП) корабля). Оскільки спостерігач, що, як правило, розміщений на верхніх надбудовах корабля з кращими умовами огляду, до того ж споряджений ООПП (біноклем чи зоровою трубою), має суттєво більшу можливість (ймовірність) першим виявити повітряну ціль (ПЦ), то саме від нього через канал зв'язку (у вигляді КПУ) до СЗ надходить інформація у вигляді мовних команд про напрям на виявлену спостерігачем ПЦ в системі координат корабля (зон відповідальності). Зауважимо, що у випадку використання бінокля спостерігач на око визначає просторові кути виявленої цілі (відносно палуби і ДП корабля). Розворотами наголів’я із ЗО і тулуба з плечовою подушкою (а значить і ТПК з ПМ і ПП) СЗ повинен відшукати ПЦ у вказаному напрямі. Далі СЗ взаємодіє з елементами зенітно-ракетного комплексу, зокрема, з ПМ і ПП, згідно з інструкціями по бойовому використанню конкретного комплексу озброєння. Суттєвими недоліками існуючої корабельної візуально-оптичної системи цілевказування-націлювання наводимої вручну зенітної ракети є великі похибки при визначені спостерігачем напрямку на виявлену ціль, значні втрати часу на передачу голосом величин просторових кутів і можливі при цьому помилки в сприйнятті їх СЗ, і, головне, у низький точності виконання останнім команд для повторного пошуку ПЦ неозброєним зором, вірніше крізь захисні окуляри, споряджені простим склом, які до того ж можуть бути забруднені від пусків ЗР. Все це призводить до зниження ймовірності націлювання ЗР, відповідно до подовження реакції комплексу озброєння, а значить до зниження його ефективності. Більш докладно про існуючі корабельні системи візуально-оптичного цілевказування-націлювання ЗР, оснащеної ГСН, можна прочитати у відповідних спеціальних описах (чи формулярах), зокрема, див., наприклад, [1, 2]. Найближчою по схемотехніці до заявлюваного технічного рішення і прийнятою за прототип є корабельна система візуально-оптичного цілевказу вання-націлювання наводимої вручну ЗР, представлена і описана в [1, 2]. Система-прототип має такий склад компонентів і зв'язки між ними (див. фіг. 1). ·Зенітна ракета (ЗР) 1, що оснащена головкою самонаведення (ГСН) 2 (наприклад, інфрачервоного діапазону), розміщена в транспортно-пусковому контейнері (ТПК) 3, який споряджений пусковим механізмом (ПМ) 4. На ПМ 4 закріплена плечова подушка 5, завдяки якій стрілок-зенітник (СЗ) утримує ТПК 3 з ЗР 1 на плечі і має змогу розвертати їх по азимуту (в площині палуби, на якій стоїть СЗ) і разом з рукояткою ПМ 4 - по куту місця jсз. На ПМ 4 розташований також прицільний пристрій (ПП) 6, виконаний, наприклад, у комплексі 9К-34 [6] у вигляді мушки або діоптрійного кільця (ближче до очей СЗ) і чотирьох упреджувальних кілець, розташованих на відкидній пластині біля переднього кінця ПМ під різними розрахованими напряд кутами упряджень. ·Для захисту очей СЗ під час пуску ЗР від ймовірного попадання продуктів згоряння двигуна ЗР передбачені захисні окуляри 7, виконані з плоскопаралельного скла і закріплені перед очами (з можливістю ввода-виводу з поля зору) на наголів’ї (шоломі-касці) 8. ·В склад спорядження СЗ та спостерігача, а значить і в систему, входить канал зв’язку 9, наприклад, у вигляді однієї з гілок корабельного (двостороннього телефонного) переговорного устаткування (КПУ) з допомогою якого можуть обмінюватися мовною інформацією, зокрема, про координати виявленої повітряної цілі (ПЦ). Спостерігач завжди віддалений від СЗ на певну відстань в межах корабля, яку враховують при цілевказуванні у вигляді вектора паралакса (бази). В систему входить, як складовий компонент, оптичний оглядово-пошуковий приклад 10 (ООПП), а також компоненти навігаційного обладнання корабля, зокрема, креномір 11, диферентомір 12 і визначник курсу - компас, які використовують для більш точного визначення просторового положення ПЦ того чи іншого типу. Як ООПП 10 може застосовуватись бінокль, утримуваний спостерігачем в руках, див. [2], або бінокулярна чи монокулярна зорова труба типу ТЗК. Остання, як правило, закріплена на тумбі-стойці 14 і споряджена напівкардановим підвісом з покажчиками (шкалами) 15 кутів, просторового розвороту оптичної осі "в" ООПП 10, яка може бути позначена в полі зору у вигляді індексу лінії візирування (наприклад, кільця або трехрестя). Спостерігач по кутах курсу (або рискання), диференту і крену корабля на покажчиках (репітерах) 16 стрілочного або цифрового типу і по кутах лінії візирування ПЦ "в" на покажчиках (шкалах) 15 готує дані цілевказування і передає їх СЗ. Суттєві і значно впливаючі на ефективність бойового використання ЗР недоліки системипрототипу полягають у тому, що: А) склад і структура системи призводить до значних похибок визначення спостерігачем даних на цілевказування. Навіть для варіанта ООПП 10 у вигляді ТЗК на стойці з покажчиками кутів розвороту оптичної осі, ці похибки досягають 5...10° (в кожній площині), оскільки спостерігач невчасно і 2 34215 приблизно визначає дані цілевказування з урахуванням репітерів 16 при качці корабля; Б) передача інформації про ПЦ голосом за допомогою КПУ, як канала зв’язку 9, супроводжується значними витратами часу, в тому числі на повтори, що призводить до застарівання вироблених даних цілевказування. Тобто, системі-прототипу властива недостатня швидкодія і низька пришкодостійкість; В) недостатня точність вироблення даних цілевказування і суттєве запізнення в їх передачі, а також (головне!) відсутність опорних орієнтирів для відліку переданих через КПУ кутів цілевказування призводять до затягування пошуку СЗ повітряної цілі, зниження ймовірності її виявлення і навіть до зриву націлювання ЗР. Все це, відповідно, знижує реакцію всього корабельного зенітно-ракетного комплексу. В основу винаходу поставлені задачі поліпшення точності цілевказування та ручного націлювання самонавідної ЗР, скорочення часу реакції системи і - в підсумку - підвищення ефективності застосування корабельного ПЗРК. Для вирішення поставлених задач запропоноване нове технічне рішення корабельної візуально-оптичної системи ручного націлювання самонавідної ЗР шляхом введення нових компонентів, відозміни деяких існуючих компонентів і нової організації взаємозв’язків між ними, а саме: В корабельній візуально-оптичній системі ручного націлювання самонавідної зенітної ракети, розміщеної в спорядженому пусковим механізмом і прицільним пристроєм транспортно-пусковому контейнері, що утримується на плечі стрілказенітника, на наголів’ї якого закріплені захисні окуляри, котра містить також оптичний оглядовопошуковий пристрій спостерігача, канал зв'язку між спостерігачем і СЗ, а також креномір і диферентомір, захисні окуляри споряджені додатково введеним візирно-індикаторним засобом (ВІЗ), який містить формувач зображення візирної мітки та індекса-вказувача потрібного просторового довороту і з'єднану з ним схему керування. До складу системи додатково введені вимірювач кутів просторового положення візирної мітки в корабельній системі координат і підключений до нього вузол визначення поправок, при цьому вихід останнього ввімкнений на вхід схеми керування візирно-індикаторного засобу, а входи цього вузла ввімкнені до креноміра, диферентоміра і до виходу додатково введеного давача кутів просторового положення оптичної осі оглядово-пошукового пристрою. Для підвищення швидкості пошуку ПЦ і з метою поліпшення характеристик супроводження її під час цілевказування і націлювання ЗР в системі, оглядовопошуковий пристрій виконаний у вигляді візирного приладу телескопічного (з невеликою кратністю) або коліматорного (з напівпрозорим склом) типу, який укріплений на додатково введеному наголів’ї спостерігача, а давач просторового положення оптичної осі візирного пристрою виконаний у вигляді сукупності декількох реперних елементів, закріплених на наголів’ї фіксовано відносно лінії візирування і взаємодіючих за допомогою модульованих потоків електромагнітного випромінювання з одним чи більше базовими блоками, встановленими на опорному конструктіві корабля, і блока визначення кутів просторового положення лінії візирування, який підключений до реперних елементів і базових блоків, а вихід якого ввімкнений до входу вузла визначення поправок. Також вимірювач просторового положення візирної мітки, виконаний у вигляді сукупності декількох закріплених на наголів’ї стрілка-зенітника фіксовано по відношенню візирно-індикаторного засобу гіровимірювальних датчиків і встановленого на опорному конструктіві корабля блока базових гіровимірювальних датчиків, осі чутливості яких орієнтовані в корабельній системі координат, і з'єднаного з усіма гіровимірювальними датчиками вузла визначення кутів просторового положення візирної мітки, вихід якого ввімкнений на вхід вузла визначення поправок. Тобто, в візуально-оптичну систему націлювання ЗР введені нові функціональні компоненти: ·візирно-індикаторний засіб (ВІЗ) з формувачем зображення візирної мітки (ВМ) та індексавказувача потрібного просторового довороту (ІВППД) і з'єднана з ним схема керування формувачем; ·вимірювач кутів просторового положення візирної мітки (КППВМ) ВІЗ; ·вузол визначення поправок (ВВП); ·давач кутів просторового положення лінії візирування (КППЛВ) ПВП. Так, ВІЗ з формувачем зображення ВМ та ІВППД може бути виконаний у вигляді приєднаного до ЗО коліматорного візиру (див. [10, 11]), поле зору якого спряжене з полем зору окулярів. Якщо в якості формувача зображення ВМ та ІВППД використана електронно-променева трубка, то схема керування до неї може бути побудована по класичній схемі машинного синтезу графічних зображень, наприклад, з функціональною розгорткою [12, 13]. Оскільки ВІЗ приєднаний до ЗО, які в свою чергу закріплені на наголів’ї (скажімо, на шоломікасці) СЗ, а зображення ВМ фіксоване відносно корпусу ВІЗу і відносно корпусу ЗО, а значить, наголів'я, то вимірювач КППВМ в корабельній системі координат може би виконаний у вигляді давача кутів просторового розвороту наголів'я-шолому відносно базових конструктивів корабля на робочому місці СЗ. Одне з відомих схемотехнічних виконань представлене, наприклад, в [14]. ВВП в запропонованій системі представляє собою обчислюваний пристрій аналогового чи цифрового, чи комбінованого типу [15, 16]. Давач КППЛВ пошуково-візирного пристрою може бути виконаний за схемотехнікою, представленою в мат. ФРГ 1.258.302 (F41д, 1964 р.). Таким чином, заявлена корабельна візуальнооптична система ручного націлювання самонавідної ЗР є такою, що може бути промислово реалізована з погляду здійснимості. Введення нових компонентів у систему і організація запропонованих зв'язків між ними і існуючими компонентами, а також їхнє взаєморозташування, призводять до оголошених поліпшень та позитивних ефектів, а саме: а) введення у систему приєднаного до ЗО ВІЗа з формувачем зображення ВМ та ІВППД і схемою керування, а також вимірювача КППВМ цього ВіЗа в корабельній системі координат, дає змогу СЗ без 3 34215 відриву погляду від повітряної обстановки і практично миттєво спостерігати і сприймати візуально відображену команду на доворот наголів’я з окулярами для відшукання ПЦ, виявленої і вказуваної спостерігачем. Ці компоненти забезпечують повну визначеність команд цілевказування і виключають будь-які витрати часу на уточнення інформації для розворотів ТПК і націлювання ЗР на виявлену спостерігачем ПЦ. Таким чином, підвищена швидкодія системи, поліпшена ергономічність і надійність процесів цілевказування та націлювання, виконуваних з її допомогою; б) введення обчислюваного ВВП, вихід якого підключений до схеми керування ВІЗу , а входи з'єднані з вимірювачем КППВМ, диферентоміром, креноміром і давачем КППЛВ ПВП, забезпечує більш повне і, головне, більш точне вироблення сигналів-команд для СЗ на пошук ПЦ і доворотів ТПК з ЗР. Завдяки цьому система є суттєво більш точною, ніж прототип і більш зручною (ергономічнішою), особливо для спостерігача; в) введення давача КППЛВ ПВП і його ввімкнення на ВВП зводить до нуля втрати часу спостерігачем на вироблення команд (інформації) для націлювання ЗР і, завдяки цьому - до відчутного зменшення методологічних (операторських) похибок при виробленні даних для націлювання. Тобто, заявлювана система є методично більш точною, а також більш зручною для спостерігача; г) розміщення (закріплення) ПВП на наголів’ї (шоломі-касці) спостерігача і виконання ПВП у вигляді оптичного приладу, а давача КППЛВ - у вигляді сукупності елементів, яка забезпечує дистанційне вимірювання кутів просторового положення лінії візирування ПВП в корабельної системі координат, збільшує свободу пошукових операцій спостерігача в зоні (секторі) відповідальності, підвищує ймовірність, а також дистанції виявлення ПЦ, що, в підсумку, підвищує покажчики ефективності цілевказування і бойового націлювання ЗР. Тобто, система характеризується кращою виявною здатністю і точністю, завдяки чому забезпечує більшу ефективність застосування корабельного ПЗРК. Таким чином, запропоноване технічне рішення корабельної візуально-оптичної системи ручного націлювання самонавідної ЗР відповідає всім необхідним критеріям патентоспроможності. Викладена суть запропонованої корабельної системи пояснюється доданими кресленнями і нижченаведеним описом. Так, на фіг. 1 представлена конструктивнофункціональна схема існуючої системи прототипу. На фіг. 2 зображені: а) конструктивнофункціональна схема запропонованої корабельної візуально-оптичної системи ручного націлювання самонавідної ЗР з розкриттям схемотехніки виконання варіанту вимірювача КППВМ ВІЗу; б) зображення повітряного простору крізь ЗО і поля зору ВІЗу в момент приймання цілевказування в ході націлювання ЗР. На фіг. 3 зображена конструктивно-функціональна схема варіанту виконання запропонованої системи. Заявлювана система містить (див. Фіг. 2): ·самонавідну ЗР 1, що оснащена ГСН 2 оптичного діапазону чутливості. ЗР 1 розміщена в ТПК 3, який споряджений ПМ 4. На останньому закріп лена плечова подушка 5, з допомогою якої СЗ утримує ТПК 3 на плечі і має змогу розвертати його по азимуту і по куту місця (позначений як jсз). Нагадаємо, що на деяких кораблях ТПК з ПМ може бути встановлений (один чи декілька - пакетом) у двоповоротному підвісі на опорі, закріпленій, наприклад, на палубі. В цьому випадку ТПК споряджений плечовими упорами та/або рукояткамиважелями, для розвертання вручну в потрібному напрямі в ході націлювання ЗР; ·закріплений на ПМ 4 (або безпосередньо на ТПК 5) прицільний пристрій (ПП) 6, виконаний у вигляді комбінації діоптр (мушка) і одна (чи група) упереджувальних кілець. Зазначимо, що в деяких типах корабельних ПЗРК, зокрема, тих, де ТПК зібрані в пакети, загальний для всіх ТПК ПП 6, як правило, виконаний у вигляді ракурсного прицілу (див. [17]); ·захисні окуляри (ЗО) 7, що закріплені на наголів’ї (шоломі-касці) 8 СЗ. Крізь плоско-паралельні скельця ЗО 7 СЗ спостерігає навколишній простір, відшукує (самостійно чи по цілевказуванню від спостерігача) ПЦ і, користуючись ПП 6, націлює ЗР, згідно з правилами по бойовому застосуванню конкретного типу ПЗРК (див., наприклад, [5]); ·канал зв'язку 9 між спостерігачем і СЗ у вигляді телефонного КПУ, що закінчується ларингофоно-телефонними гарнітурами у СЗ ("а") і спостерігача (“б”); ·пошуково-візирний пристрій (ПВП) 10, наприклад, оптичного типу, за допомогою якого спостерігач оглядає простір у відведеній зоні відповідальності, виявляє ПЦ і, візируючи її у відносному русі, визначає її просторове положення в системи координат корабля; ·компоненти навігаційного обладнання корабля, зокрема, креномір 11, диферентомір 12. ·Спостерігач, що аналогічно СЗ може бути споряджений наголів’ям у вигляді захисного шолому-каски 13, взаємодіє з ПВП 10, яким може бути механічний візирний пристрій або зорова труба того чи іншого типу (наприклад, типу ТЗК). Для виконання функції візирування ПВП 10 має сформований відповідним чином в полі зору індекс лінії візирування. Той чи інший варіанти ПВП 10 встановлені на тумбі-стойці 14 в двоповоротному (двокоординатному) підвісі, спорядженому ручками повертання і шкалами-покажчиками кутів повороту лінії візирування по азимуту і куту місця 15. В систему включений також давач КППЛВ 17, котрий може бути виконаний, наприклад, у вигляді пари перетворювачів "вал-код" або обертових трансформаторів, які кінематично пов'язані з двоповоротним підвісом ПВП 10 та електрично ввімкнені до входів введеного до системи ВВП 18, на інші входи якого ввімкнені креномір 11, диферентомір 12. В заявлюваній системі ЗО 7 споряджені ВІЗом 19, за допомогою формувача зображення, наприклад, типу ЕПТ, вводить в поле зору ЗО 7, а значить і в зону бачення СЗ два індекси (див. фіг. 2б): 1) індекс ВМ, який ототожнюють з просторовим положенням бісекторіальної oсі конуса бачення СЗ крізь ЗО; 2) індекс-вказувач потрібного просторового довороту (ІВППД) конусу бачення, точніше його бісекторіальної осі, тобто ВМ. Формувач зо 4 34215 браження ВМ та ІВППД з'єднаний зі схемою керування 20, вхід якої увімкнений до першого (І) виходу ВВП 18. Зауважимо, що ВВП 18 може бути споряджений ще одним - другим (ІІ) - виходом, на якому генерують сигнали, пропорційні КППЛВ з урахуванням поточних крену і диференту корабля. До цього другого виходу ВВП 18 може бути підключений будь-який іншій споживач інформації про виявлену ПЦ, скажімо, обчислювальний агрегат корабельного зенітно-артилерійського комплексу. В систему включений вимірювач КПП ВМ 21, в системі координат корабля, котрий може бути виконаний у вигляди рамочно-важільного кінематичного механізму (наприклад, представленому в мат. ФРГ 1.258.302. 1964 р.), опорні кінематичні елементи якого приєднані до базових конструктивів корабля. Цей механізм-вимірювач може бути споряджений, скажімо, потенціометричними датчиками. Вихід вимірювача КПП ВМ 21 ввімкнений до одного з входів ВВП 12. Очевидно, що виконання вимірювача КПП ВМ 21 у вигляді рамочно-важільного механізму є досить громіздким, і, головне, такий вимірювач суттєво обмежує свободу рухів СЗ, як у лінійних його переміщеннях по палубі, так і щодо швидкостей пошуку ПЦ і націлювання. З метою забезпечення більшої ергономічності заявлюваної системи візуально-оптичного націлювання ЗР і підвищення її швидкодії і точності, запропоноване нове схемотехнічне виконання вимірювача КПП ВМ 21 у вигляді сукупності механічно не пов'язаних між собою елементів, а саме (див. фіг. 2 і фіг. 3): На корпусі ВІЗу 19 чи ЗО 7, або (краще) на наголів'ї (шоломі-касці) 8, з яким механічно з'єднані ЗО 7 (а значить, і ВІЗ 19), закріплені фіксовано щодо ВІЗу 19 не менше двох гіровимірювальних датчиків 22 з осями чутливості, орієнтованими, скажімо, взаємоортагонально По осях поля зору ВІЗу 9 співпадають з осями картинної площини зони бачення ЗО 7. На опорному конструктиві корабля встановлений блок базових (не менше двох) гіровимірювальних датчиків 23, осі чутливості яких зорієнтовані, наприклад, в корабельній системі координат. Нашоломні гіровимірювальні датчики 22 і базові гіровимірювальні датчики 23 електрично з'єднані із спорядженим керованим перемикачем (не показано на фіг.2, 3) вузлом визначення КППВМ 24. Цей вузол 24 може бути виконаний, наприклад, у вигляді сукупності електронно-обчислювальних схем, що реалізують більш або менш складний алгоритм (в залежності від типу застосованих гіровимірювальних датчиків 22 і 23) визначення розворотів ВІЗу 19 (або наголів'я 8) відносно опорного конструктива корабля. Скажімо, якщо будуть застосовані гіровимірювальні датчики кутових швидкостей, то йдеться про інтегрування абсолютних кутових швидкостей ВІЗу 19 (а значить, і його ВМ) та корабля, і далі - відповідно, обчислення різниць кутів на інтервалі часу, який задають за допомогою заданого керованого перемикача. Вихід вузла 24 (що є виходом вимірювача 21) ввімкнений на один із входів ВВП 18. Очевидно, що варіант ПВП 10 у вигляді утримуваного в руках бінокля дає більшу свободу рухів і переміщень спостерігачу, а значить більшу швидкість пошуку і ймовірність виявлення ПЦ (при інших тотожніх умовах) в порівнянні з варіантом ПВП 10 на стійці 14 із шкаламипокажчиками 15 і розташованим на ній же давачем КППЛВ 17. Нагадаємо, що пошукові дії спостерігача при використанні ПВП на стійці допомагають, по-перше, в візуальному огляді зони відповідальності і наведенні поля зору ПВП 10 на підозрілу область (пляму). По-друге, у поточному візируванні ідентифікованої ПЦ, тобто - суміщенні індексу лінії візирування і спостерігаємого зображення ПЦ (у відносному русі останньої) шляхом, по можливості плавних, розворотів ПВП 10. Такий алгоритм взаємодії спостерігача з ПВП на стійці є досить важким у виконанні і супроводжується значними похибкам у візируванні, особливо, при качці корабля. Більш вигідним з точки зору швидкодії пошуку 1 цілевказування і ергономіки є варіант (див. фіг. 3) закріплення оптичного ПВП 10 на наголів’ї 13 і схемотехнічного виконання давача КППЛВ 17 у вигляді дистанційного (не пов'язаного конструктивно-кинематично з конструктивами корабля) обладнання, призначеного для поточного визначення КППЛВ. Наприклад, в якості такого обладнання може бути використана схемотехніка, аналогічна описаному вище варіанту вимірювача КППВМ 21, але тут може виявитися небажаною операція керування (вмикання-вимикання) перемикачем у вузлі визначення КПП. З метою забезпечення ергономічних переваг для спостерігача запропоноване нове схемотехнічне рішення спорядження спостерігача, в тому числі КППЛВ 17, а саме (див. фіг. 3): ПВП 10, виконаний як оптичний прилад коліматорного чи телескопічного, чи комбінованого типу, закріплений на наголів’ї (шоломі-касці) 13 спостерігача. Давач КППЛВ 17, наприклад, може бути виконаний у вигляді сукупності таких компонентів: на корпусі приладу або на наголів’ї спостерігача розташовані фіксовано відносно лінії візирування "в" і один відносно іншого декілька реперних елементів 25, виконаних, наприклад, у вигляді точкових катодіоптричних або світлоповертачів, або фотоприймачів, які взаємодіють за допомогою модульованих в часі і просторі потоків електромагнітного оптичного випромінювання (показано z-стрілкою) з одним чи більше базовими блоками 26. Останні встановлені на конструктивах корабля в системі його координат і можуть бути виконані, наприклад, у вигляді схемно конструктивної комбінації "світлогенератор - оптична система із світлоподілювачем - просторово селективний фотоприймальний пристрій". І реперні елементи 25 і базові блоки 26 своїми виходами ввімкненні на входи блоку визначення КППЛВ 27, вихід якого підключений до одного з входів ВВП 18. Корабельна візуально-оптична система націлювання вручну ЗР функціонує таким чином (див. фіг.2, 3). Спостерігач здійснює огляд надводної і повітряної обстановки у відведеному йому секторі (зоні) відповідальності шляхом послідовних розворотів ПВП 10, згідно з прийнятою схемою ("малюнком") огляду. Виявивши і розпізнавши ПЦ (перенесення лінії зору "е" на лінію зору "в", що відповідає куту місця jсп), він доповідає про цей факт в головний командний пост корабля і з допомогою каналу зв'язку 9 передає підготовчу інформацію СЗ, а сам розпочинає візирувати індексом лінії візування 5 34215 (шляхом суміщення його із зображенням вибраної ПЦ). Сигнали з КППЛВ 17, пропорційні поточним значенням кутів просторового відносного положення візируваної ПЦ в системі координат корабля (лінія "в"), подають на один з входів ВВП 18, на інші входи якого подають сигнали з креноміра 11 і диферентоміра 12, пропорційні поточним кутам крена і диферента корабля. З вимірювача КППВМ 21 на четвертий вхід ВВП 18 подають сигнали, пропорційні кутам просторового розвороту бісекторіальної осі (з лінії "д" на лінію "ж") ЗО 7, що закріплені на наголів’ї (шоломі-касці) 8 СЗ. З виходу І ВВП 18 сигнали, пропорційні різницям між положенням лінії візування ПЦ ("в") спостерігача і кутам просторового положення бісекторіальної осі ЗО 7 (ліній "г") з урахуванням відхилень голови СЗ (завдяки дії вестибулярного апарату його) і поточних величин крена і диферента, подають на схему керування 20, де виробляють сигнали для генерування в формувачі зображень ВМ та ІВППД ВІЗу 19, в результаті чого в поле бачення крізь ЗО 7 СЗ спостерігача кутове просторове розходження Dj (див. фіг. 2б). Оцінюючи це розходження СЗ розвертає наголів'я 8 разом із ЗО 7 (і ВІЗом 19) в сторону лінії "ж", що майже (з урахуванням паралаксу системи) паралельно лінії "в" поточного відносного положення ПЦ. Помітивши вказану спостерігачем ПЦ СЗ, який за попередніми командами вже підготував ЗР 1 до запуску (згідно з інструкціями по бойовому застосуванню), розвертає ТПК 3 (поворотами тулуба з допомогою плечової подушки 5 і рукоятки ПМ 4, якщо ТПК із ЗР утримується на плечі СЗ, або поворотами плечових упорів-рукояток - якщо ТПК встановлений у двоповоротному підвісі на опорі) в сторону спостерігаємої ПЦ. Використовуючи ПП 6, СЗ здійснює заключні операції націлювання ЗР 1, згідно з правилами по бойовому застосуванню конкретного ПЗРК (наприклад, контролює захоплення ПЦ ГСН 2, разаретурує останню, додатковим доворотом ТПК вводить упередження і нарешті проводить пуск ЗР 1). Як вказано вище, на виході ІІ ВВП 18 сформовані сигнали, що призначені для інших корабельних споживачів інформації про виявлені ПЦ. Згідно з тим чи іншим алгоритмом вироблення поправок, ці сигнали можуть бути пропорційними або безпосередньо КППЛВ (лінії "в"), або просторовими кутами, обчислюють з урахуванням поточних крена і диферента корабля (що потрібно, зокрема, при використанні інформації від спостерігача для прицілювання зенітної артилерійської установки). Представлені вище функціонування системи і взаємодія компонентів її залишаються такими ж і для іншого схемотехнічного варіанту розташування ПВП 10, в якому останній закріплений на наголів’ї (шоломі-касці) спостерігача. При цьому запропоноване схемотехнічне виконання КППЛВ 17 забезпечує більшу свободу рухів спостерігача при огляді надводної і повітряної обстановки в зоні відповідальності, а внаслідок цього, підвищує швидкодію пошуку ПЦ і самої процедури візирування/супроводження її. Таким чином, реалізація запропонованої корабельної візуально-оптичної системи ручного націлювання самонавідної зенітної ракети призведе до відчутного підвищення точності і перешкодозахи щеності цілевказування-націлювання, скорочення часу реакції ПЗРК (і корабельного зенітного артилерійського комплексу тощо), а також до покращення умов діяльності і спостерігача і стрілказенітника. Прийняті скорочення: ПЗРК - переносний зенітно-ракетний комплекс; ЗР - зенітна ракета; ГСН - головка самонаведення; ПЦ - повітряна ціль; ТПК - транспортно-пусковий контейнер; ПМ - пусковий механізм; СЗ - стрілок-зенітник; ЗО - захисні окуляри; ПВП – пошуково-візирний пристрій; ТЗК - труба зорова командирська; КПУ - корабельне переговорне устаткування; ПП - прицільний пристрій; ВІЗ - візирно-індикаторний засіб; вимірювач КППВМ - вимірювач кутів просторового положення візирної мітки; ВМ - візирна мітка; ІВППД - індекс-вказувач потрібного просторового довороту; ВВП - вузол визначення поправок; давач КППЛВ - давач кутів просторового положення лінії візирування; ЕПТ - електронно-променева трубка; ООПП - оптичний оглядово-пошуковий прилад; ДП - діаметральна площина. Використана література: 1. Морская тумбовая установка П3РК (МТУ-4У). Техническое описание. 2. Корендович B.C., Сухоручкин С.Б. Боевое применение ЗРК и ЗАК самообороны. Севастополь: ЧВВМУ им. Нахимова, 1983. 3. Волковский Н.Л. Энциклопедия современного оружия и боевой техники. - С.-Петербург: Полигон - ACT, 1997. 4. Каталог "Оружие России". Вооружение Военноморского Флота. - АО "Милитерн Перейд". РФ-М., 1995. 5. Комплекс изделия 9К-34 (Наставление по боевому применению). 6. Комплекс изделия 9К-34. Техническое описание. 7. Контрольский И.П., Маликов Ф.Д., Рогов П.K. Оптические приборы зенитной артиллерии. М.: Воениздат, 1960. 8. Прожекторная зенитная труба. Руководство службы. - М.: Воениздат НКО, 1945. 9. Артиллерийская радиолокационная станция МP-104 (часть 2). Техническое описание. 10. Чубилин Н.М. Основы теории артиллерийских приборов. - М.: Воениздат, 1951. 11. Кулагин С.В. и др. Оптико-механические приборы. - М.: Машиностроение, 1975. 12. Гуглин И.Н. Электронный синтез телевизионных изображений. - М.: Сов. радио,1979. 13. Современные методы и устройства отображения информации. - М.: Радио и связь, 1981. 6 34215 14. Бородин В.Т., Рогальский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. - М.: Машиностроение, 1978. 15. Справочник по аналоговой вычислительной технике. - Киев: Техника, 1976. 16. Справочник по цифровой вычислительной технике. - Киев: Техника, 1976. 17. Лопырев М.А., Лосин В.М. Учебник комендора. - М.: Воениздат, 1984. 18. Николаев И.Д. и др. Боевое применение корабельной артиллерии по воздушным целям. - Л.: 6 ВОК ВМФ, 1980. Фіг. 1 7 34215 Фіг. 2 8 34215 Фіг. 3 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 9
ДивитисяДодаткова інформація
Назва патенту англійськоюShip visual-optical system of pointing of pointed manually anti-aircraft rocket equipped with head of self-pointing
Автори англійськоюSemenov Serhii Dmytrovych, Borysiuk Anatolii Oleksiiovych, Chabanenko Pavlo Pavlovych
Назва патенту російськоюКорабельная визуально-оптическая система нацеливания наводимой вручную зенитной ракеты, оборудованной головкой самонаведения
Автори російськоюСеменов Сергей Дмитриевич, Борисюк Анатолий Алексеевич, Чабаненко Павел Павлович
МПК / Мітки
МПК: F41G 7/00, G02B 27/32
Мітки: наводимої, система, оснащеної, націлювання, корабельна, самонаведення, вручну, зенітної, візуально-оптична, ракети, головкою
Код посилання
<a href="https://ua.patents.su/9-34215-korabelna-vizualno-optichna-sistema-nacilyuvannya-navodimo-vruchnu-zenitno-raketi-osnashheno-golovkoyu-samonavedennya.html" target="_blank" rel="follow" title="База патентів України">Корабельна візуально-оптична система націлювання наводимої вручну зенітної ракети, оснащеної головкою самонаведення</a>
Візуально-оптична система керування протиградовим комплексом
Номер патенту: 28429
Опубліковано: 16.10.2000
Автори: Борисюк Анатолій Олексійович, Кирєєв Михайло Степанович
МПК: G01S 5/00, A01G 15/00
Мітки: протиградовим, керування, система, комплексом, візуально-оптична
Формула / Реферат:
1. Визуально-оптическая система управления противоградовым комплексом, содержащая смонтированные на каждой противоградовой установке азимутальный и угломестный приводы разворотов направляющих, а также установщик времен раскрытия реагентосодержащих отсеков каждого из расположенных на направляющих противоградовых изделий, выносной пост наблюдения и наведения, состоящий из опоры с поворотной вокруг вертикальной оси траверсой, снабженной...
Візуально-оптична система керування протиградовим комплексом
Номер патенту: 29665
Опубліковано: 15.11.2000
Автори: Борисюк Анатолій Олексійович, Киреєв Михайло Степанович
МПК: A01G 15/00, G01S 5/00
Мітки: керування, протиградовим, система, візуально-оптична, комплексом
Текст:
...образования (ГО), что особенно выгодно сказывается в ситуации, когда над градоохраняемой территорией возникло несколько развивающихся ГО. Наличие сопряженного (сблокированного) с визиром определителя дистанции до объекта визирования в сочетании о вычислительным блоком определения потребных углов пространственного разворота направляющих ПГУ и временных интервалов да раскрытие МВР - содержащих отсеков ПГИ (блоком ОПУПРНиВИ) и пультом ввода...
Оптична система з виділенням рухомих фігур
Номер патенту: 28745
Опубліковано: 16.10.2000
Автор: Чугуй Володимир Леонідович
МПК: G02B 23/00
Мітки: фігур, рухомих, виділенням, оптична, система
Формула / Реферат:
Оптична система з виділенням рухомих фігур, яка вміщує канал візира, в якому розміщені об’єктив, обертальна система, окуляр, яка відрізняється тим, що в канал візира додатково залучені перший світлоділильний куб, прозора пластина з рисками у вигляді сітки, другий світлоділильний куб, перший світлоділильний куб, розміщений по ходу променів між об’єктивом і обертальною системою, пластина, розміщена між першим світлоділильним кубом і...
Оптична система світлодалекоміра
Номер патенту: 28991
Опубліковано: 16.10.2000
Автори: Голік Марат Миколайович, Гринюк Ігор Євгенович, Пасько Ігор Матвійович
Мітки: оптична, світлодалекоміра, система
Формула / Реферат:
1. Оптична система світлодалекоміра, яка вміщує оптично зв'язані об'єктив, дзеркало, призму і фотоприймач приймального каналу, окуляр, сітку, фокусуючу лінзу візуального каналу, випромінювач, відбивач, канал оптичного короткого замикання з засобом повороту променів, переривач променів, виконаний з можливістю поперемінного перекриття передавального каналу і каналу оптичного короткого замикання, яка відрізняється тим, що в неї введені...
Оптична система для приціла

Номер патенту: 14994
Опубліковано: 04.03.1997
Автори: Завальний Валерій Володимирович, Орлов Анатолій Іванович
МПК: F41G 1/00
Мітки: приціла, система, оптична
Формула / Реферат:
Оптическая система прицела, содержащая объектив, оборачивающую систему, состоящую из двух компонентов, причем второй компонент выполнен из одиночной линзы, и окуляр, отличающаяся тем, что первый компонент оборачивающей системы выполнен из трех линз, первая из которых расположена относительно второй на расстоянии 0,1 ... 0,5мм, вторая и третья линзы первого компонента оборачивающей системы склеены, при этом фокусное расстояние первого...
Попередній патент: Фіксуюча рамка для складання багатошарових пласких виробів
Наступний патент: Емульсійний розчинник для хімічної чистки
Випадковий патент: Спосіб отримання борошна з гороху, пророщеного у розчині морської харчової солі