Комплекс програмних та технічних засобів автоматизованого вирощування рослин “ева”
Номер патенту: 104757
Опубліковано: 10.02.2016
Автори: Новіков Юрій Юрійович, Пашкевич Леонід Полікарпович, Гладковський Денис Валерійович
Формула / Реферат
1. Комплекс програмних та технічних засобів автоматизованого вирощування рослин, що містить приймальний вузол із зачіпними механізмами та оснащену приводами раму, на якій встановлено рухомий циліндричний блок, твірна поверхня якого виконана у вигляді знімних касет для ґрунтового субстрату, світильник, розташований всередині циліндричного блока, робочу ємність з живильним розчином, розташовану в нижній частині рами, принаймні одну додаткову ємність з живильним розчином, балон із СО2, насос, датчики, що фіксують показники роботи комплексу, генератор туману ультразвукового типу, пульт керування, що містить мікропроцесорний контролер, з'єднаний із сенсорними датчиками, який контролює процес живлення рослин і виконаний з можливістю отримання та обробки показників роботи комплексу та подальшого коригування його роботи за заданими параметрами, при цьому кожна касета для ґрунтового субстрату розташована своєю площиною перпендикулярно до нормалі поверхні циліндричного блока та закріплена до циліндричного блока за допомогою двох осей з одного боку та принаймні одного тримача з іншого, тримач виконаний з можливістю автоматичного вивантаження касети для ґрунтового субстрату при обертанні циліндричного блока у зворотному напрямку, який відрізняється тим, що привод містить передачу у вигляді шестеренчастої пари, генератор туману містить систему лабіринтових каналів із проміжними решітками - краплевловлювачами та випарними сітками, мікропроцесорний контролер оснащений сенсорною панеллю, світильник виконаний у вигляді світлодіодних панелей зі світлодіодами різного спектра, об'єднаних у секції, та додатково містить конструкцію у вигляді коридору-проходу, який розташований всередині циліндричного блока, при цьому світильник, додаткові ємності з живильним розчином та інше встановлене обладнання кріпляться на каркасі коридору-проходу.
2. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що касета для ґрунтового субстрату виконана розбірною та складається із каркаса, двох роликів та лотків.
3. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що тримач касети для ґрунтового субстрату містить каркас, з'єднувальний вал, монтажне вухо, зачіп, натискач, що встановлюється відповідно до сторони монтажу тримача, зворотну пружину, стопор-відбійник.
4. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1-3, який відрізняється тим, що зачіпний механізм приймального вузла містить монтажну пластину, ролик зачіпний, важіль, тягу, зворотну пружину, основну пружину, гайку регулювання натягу пружини та виконаний із можливістю при обертанні циліндричного блока у зворотному напрямку тиснути на зачіп тримача касети для ґрунтового субстрату та звільняти її з тримача.
5. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що світлодіодні панелі світильника розташовані всередині циліндричного блока таким чином, що кожна секція світильника знаходиться в площині обертання відповідного лотка касети для ґрунтового субстрату.
6. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що світлодіодні панелі світильника мають світлодіоди різного спектра з наступним відношенням спектрів: блакитний 460nm/ червоний 660nm/ білий 10000-12000К/ ультрафіолетовий UVA/B 380nm=3/25/7/1.
7. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що секція світильника виконана у формі половини восьмигранника, причому світлодіоди розташовані на кожній грані світильника.
8. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що містить відцентровий та дозувальний насоси.
9. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що мікропроцесорний контролер виконаний з можливістю автоматичного накопичення та збереження даних на SD карту, передачі та прийому даних від оператора наступними способами зв'язку: LAN-порт, RS485/RS232-порти, MODBUS, TCP та mini-USB.
10. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що містить систему підготовки живильного розчину, яка складається із ємності з хімічними реагентами, датчиків рН, ЕС та температури та дозувального насоса.
11. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що для вимірювання кількості живильного розчину в додатковій ємності, кількості води в ємності, яка живить генератор туману та кількості газу СО2 у балоні, під відповідними ємностями встановлені тензометричні датчики.
12. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1-11, який відрізняється тим, що циліндричний блок, рама та приймальний вузол відокремлені від зовнішнього середовища за допомогою легкого каркаса, вкритого ПВХ плівкою та/або листами полікарбонату.
13. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1-12, який відрізняється тим, що виконаний як окремий елемент, який встановлений на додатковій рамі з розрахунковою кількістю таких елементів, відповідно до розмірів приміщення.
Текст
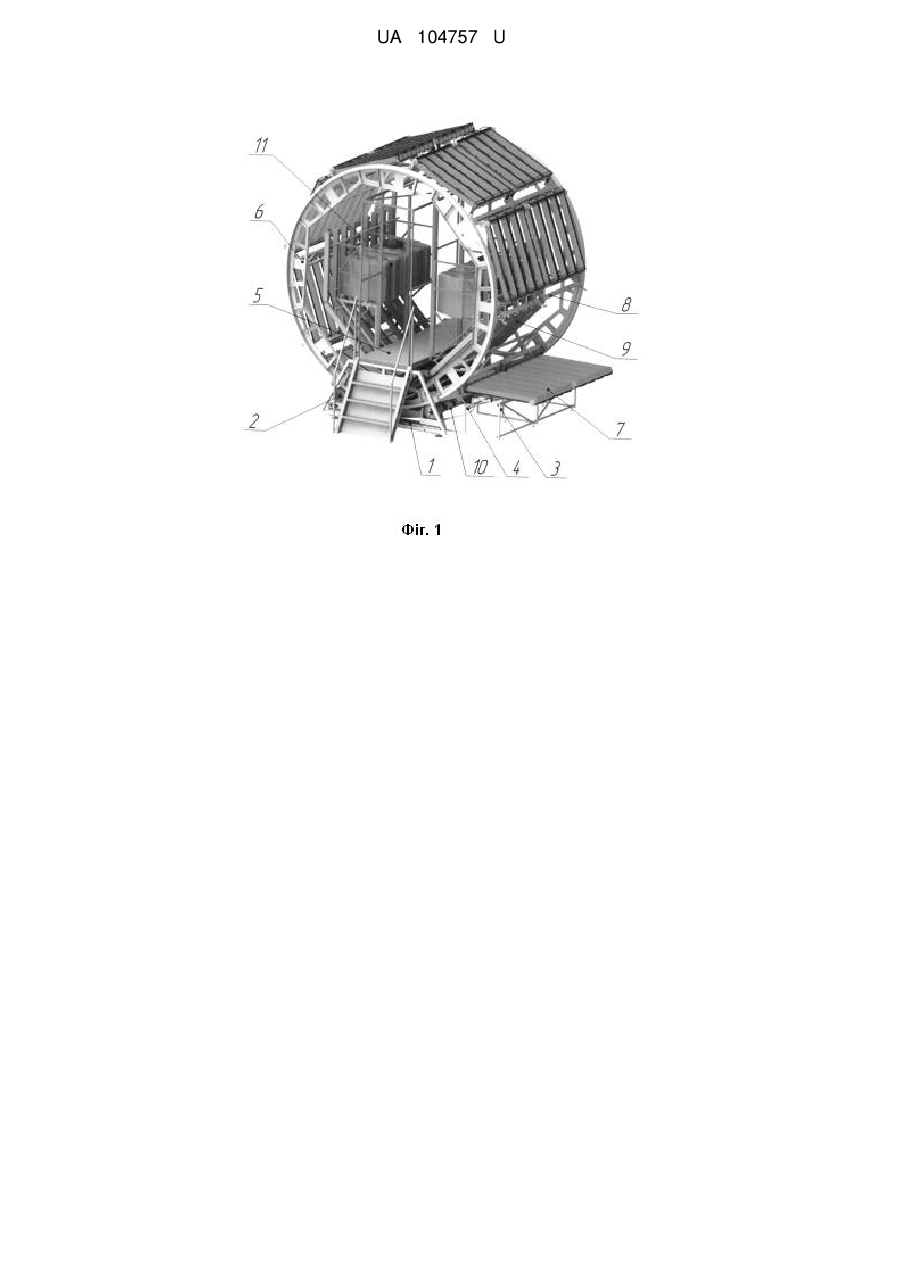
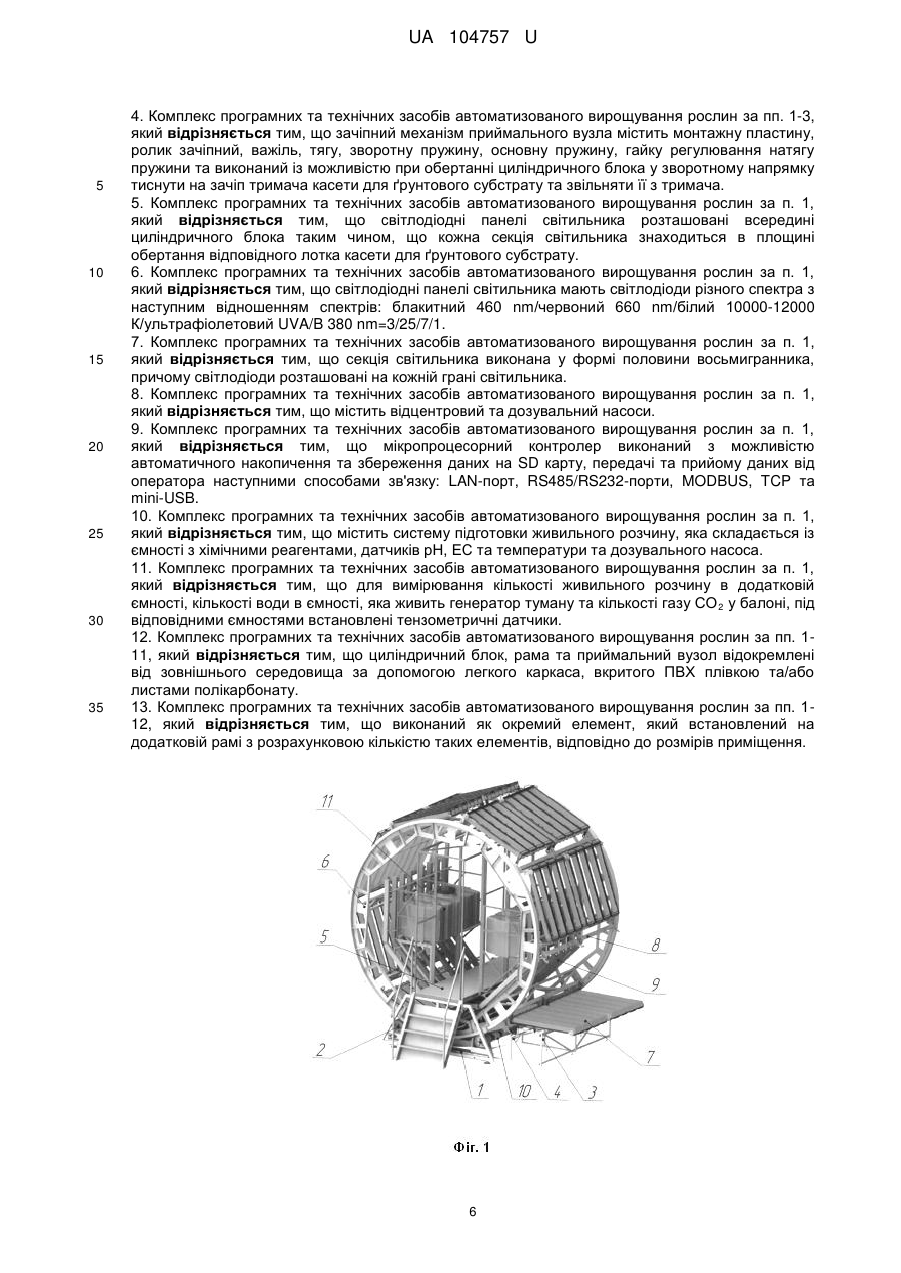
Реферат: Комплекс програмних та технічних засобів автоматизованого вирощування рослин містить приймальний вузол із зачіпними механізмами та оснащену приводами раму, циліндричний блок, твірну поверхня якого виконана у вигляді знімних касет для ґрунтового субстрату, світильник, розташований всередині циліндричного блока, робочу ємність, розташовану в нижній частині рами, принаймні одну додаткову ємність, балон із СО 2, насос, датчики, генератор туману ультразвукового типу, пульт керування, що містить мікропроцесорний контролер, з'єднаний із сенсорними датчиками. При цьому кожна касета для ґрунтового субстрату розташована своєю площиною перпендикулярно до нормалі поверхні циліндричного блока, та закріплена до циліндричного блока за допомогою двох осей з одного боку та принаймні одного тримача з іншого. Привод містить передачу у вигляді шестеренчастої пари, генератор туману містить систему лабіринтових каналів із проміжними решітками краплевловлювачами та випарними сітками, мікропроцесорний контролер оснащений сенсорною панеллю. Світильник виконаний у вигляді світлодіодних панелей зі світлодіодами різного спектра, об'єднаних у секції, та додатково містить конструкцію у вигляді коридорупроходу, який розташований всередині циліндричного блока. UA 104757 U (12) UA 104757 U UA 104757 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до сільського господарства, а саме до галузі рослинництва і може бути використана як комплекс програмних та технічних засобів для вирощування рослинних культур в замкненій системі годування гідропонним методом з елементами аеропоніки в автоматично контрольованих умовах. Може використовуватися як альтернатива традиційному вирощуванню рослин в тепличних господарствах. Відома автоматизована установка для вирощування рослин у штучному кліматі "АДАМ-1 [UA № 98612, опублікований 27.04.2015 р. Бюл. № 8], в основу якої закладено ефект, отриманий від зміни вектора сили тяжіння барабана, що обертається навколо своєї осі, та гідропонний метод вирощування рослин. Зазначена установка містить оснащену приводами раму, на якій встановлено оснащений світильником рухомий циліндричний блок, твірна поверхня якого виконана у вигляді касет з ґрунтовим субстратом, які виконані знімними, а світильник розміщено на центральній осі блока, причому в нижній частині рами встановлена ємність з живильним розчином. Додатково містить ємність з живильним розчином, насос реверсивного типу, сенсорні датчики, що фіксують температуру, вологість, рівень СО 2, рівень живильного розчину та інші показники роботи установки, генератор туману та пульт керування, який містить GSM-модем та мікропроцесорний контролер, з'єднаний із сенсорними датчиками, на якому встановлено програмний модуль, що контролює процес живлення рослин і виконаний з можливістю отримання та обробки показників роботи установки та подальшого коригування її роботи за заданими параметрами, а рама містить зачіпні механізми, які контактують з касетами, при цьому кожна касета розташована своєю площиною перпендикулярно до нормалі поверхні циліндричного блока, містить жолоби для ґрунтового субстрату та закріплена до циліндричного блока за допомогою двох осей з одного боку та принаймні одного тримача з іншого, який виконаний з можливістю автоматичного вивантаження касети при обертанні циліндричного блока у зворотному напрямку. Обертання циліндричного блока навколо своєї осі призводить до того, що рослини, що знаходяться в касетах, відчувають постійно мінливий напрямок сили тяжіння. Це призводить до блокування рецепторів рослин, які задають тривалість фази сну і неспання в залежності від поточної гравітації і положення в просторі самої рослини, внаслідок чого ріст рослин різко збільшується. Живлення рослин відбувається шляхом занурювання касет в живильний розчин, що знаходиться у ємності з живильним розчином. У зазначеній установці існує ряд суттєвих недоліків, а саме: - установка має недостатньо раціональну конструкцію, що ускладнює автоматизацію та контроль процесу роботи, а також потребує використання додаткової площі для розташування ємності з живильним розчином та іншого обладнання; - використання натрієвих ламп високого тиску як основного джерела освітлення призводить до виникнення надлишкового тепла та потребує забезпечення певних заходів по його відведенню, а також відсутність ультрафіолетового спектра, що не надає рослинам необхідного світла в належній пропорції; - використання ланцюгової передачі від мотор-редуктора до привідного колеса призводить до виникнення паразитного люфту циліндричного блока, що в свою чергу ускладнює завантаження-вивантаження касет із ґрунтовим субстратом; - ультразвукова система туманоутворення є недосконалою, тому що розпилена за допомогою ультразвукових коливань рідина не встигає випаровуватися та осідає на внутрішній поверхні циліндричного блока, не зволожуючи повітря належним чином; - недосконала конструкція касет із ґрунтовим субстратом ускладнює їх завантаженнявивантаження, тому в процесі завантаження посівного матеріалу та збору врожаю витрачається зайвий час та людський ресурс; - підігрів ємності з живильним розчином нагрівальним елементом, що розташований під дном ємності, потребує додаткових витрат енергоресурсів, що в свою чергу збільшує собівартість процесу використання установки; - відсутність належної ізоляції від навколишнього середовища ускладнює регулювання параметрів життєзабезпечення рослин. В основу корисної моделі поставлено задачу вдосконалити автоматизовану установку для вирощування рослин у штучному кліматі "АДАМ-1 шляхом створення комплексу програмних та технічних засобів автоматизованого вирощування рослин з широкими функціональними можливостями, більш ефективними засобами автоматизації та контролю роботи, та з більш економним використанням енергоресурсів. Поставлена задача вирішується тим, що відома установка, яка містить приймальний вузол із зачіпними механізмами та оснащену приводами раму, на якій встановлено рухомий циліндричний блок, твірна поверхня якого виконана у вигляді знімних касет для ґрунтового 1 UA 104757 U 5 10 15 20 25 30 35 40 45 50 55 субстрату, світильник, розташований всередині циліндричного блока, робочу ємність з живильним розчином, розташовану в нижній частині рами, принаймні одну додаткову ємність з живильним розчином, балон із СО2, насос, датчики, що фіксують показники роботи комплексу, генератор туману ультразвукового типу, пульт керування, що містить мікропроцесорний контролер, з'єднаний із сенсорними датчиками, який контролює процес живлення рослин і виконаний з можливістю отримання та обробки показників роботи комплексу та подальшого коригування його роботи за заданими параметрами, при цьому кожна касета для ґрунтового субстрату розташована своєю площиною перпендикулярно до нормалі поверхні циліндричного блока, та закріплена до циліндричного блока за допомогою двох осей з одного боку та принаймні одного тримача з іншого, тримач виконаний з можливістю автоматичного вивантаження касети для ґрунтового субстрату при обертанні циліндричного блока у зворотному напрямку, згідно з корисною моделлю, містить передачу у вигляді шестеренчастої пари, генератор туману містить систему лабіринтових каналів із проміжними решітками краплевловлювачами та випарними сітками, мікропроцесорний контролер оснащений сенсорною панеллю, світильник виконаний у вигляді світлодіодних панелей зі світлодіодами різного спектра, об'єднаних у секції, та додатково містить конструкцію у вигляді коридорупроходу, який розташований всередині циліндричного блока, при цьому світильник, додаткові ємності з живильним розчином та інше встановлене обладнання кріпляться на каркасі коридору-проходу. Згідно з корисною моделлю, касета для ґрунтового субстрату виконана розбірною та складається із каркаса, двох роликів та лотків. Згідно з корисною моделлю, тримач касети для ґрунтового субстрату містить каркас, з'єднувальний вал, монтажне вухо, зачіп, натискач, що встановлюється відповідно до сторони монтажу тримача, зворотну пружину, стопор-відбійник. Згідно з корисною моделлю, зачіпний механізм приймального вузла містить монтажну пластину, ролик зачіпний, важіль, тягу, зворотну пружину, основну пружину, гайку регулювання натягу пружини та виконаний із можливістю при обертанні циліндричного блока у зворотному напрямку тиснути на зачіп тримача касети для ґрунтового субстрату та звільняти її з тримача. Згідно з корисною моделлю, світильник розташований таким чином, що світлодіодні панелі світильника розташовані всередині циліндричного блока таким чином, що кожна секція світильника знаходиться в площині обертання відповідного лотка касети для ґрунтового субстрату. Згідно з корисною моделлю, світлодіодні панелі світильника мають світлодіоди різного спектра з наступним відношенням спектрів: блакитний 460nm/ червоний 660nm/ білий 1000012000К/ ультрафіолетовий UVA/B 380nm=3/25/771. Згідно з корисною моделлю, секція світильника виконана у формі половини восьмигранника, причому світлодіоди розташовані на кожній грані світильника. Згідно з корисною моделлю, комплекс містить відцентровий та дозувальний насоси. Згідно з корисною моделлю, мікропроцесорний контролер виконаний з можливістю автоматичного накопичення та збереження даних на SD карту, передачі та прийому даних від оператора наступними способами зв'язку: LAN-порт, RS485/RS232-порты, MODBUS, TCP та mini-USB. Згідно з корисною моделлю, комплекс містить систему підготовки живильного розчину, яка складається із ємності з хімічними реагентами, датчиків рН, ЕС та температури та дозувального насоса. Згідно з корисною моделлю, для вимірювання кількості живильного розчину в додатковій ємності, кількості води в ємності, яка живить генератор туману та кількості газу СО 2 у балоні, під відповідними ємностями встановлені тензометричні датчики. Згідно з корисною моделлю, циліндричний блок, рама та приймальний вузол відокремлені від зовнішнього середовища за допомогою легкого каркаса, вкритого ПВХ плівкою та/або листами полікарбонату. Згідно з корисною моделлю, комплекс виконаний як окремий елемент, який встановлений на додатковій рамі з розрахунковою кількістю таких елементів, відповідно до розмірів приміщення. Технічний результат заявленої корисної моделі вбачається у збільшенні корисної площі комплексу, збільшенні врожайності, зменшенні енергії, що витрачається на роботу комплексу, зменшенні числа операцій, контрольованих оператором та зменшення зусиль оператора, що витрачаються на обслуговування комплексу. Між сукупністю суттєвих ознак корисної моделі, що заявляється, і технічним результатом, що досягається, існує наступний причинно-наслідковий зв'язок. 2 UA 104757 U 5 10 15 20 25 30 35 40 45 50 55 60 Виконання передачі приводу у вигляді шестеренчастої пари призводить до усунення паразитарного люфту циліндричного блока та забезпечує його точне позиціювання. Підтримання режиму належної вологості повітря в комплексі забезпечується за допомогою генератора туману ультразвукового типу. Виконання генератора туману з системою лабіринтових каналів із проміжними решітками -краплевловлювачами та випарними сітками дозволяє максимально випаровувати розпилену ультразвуком рідину, не допускаючи її осіданню на поверхню як дрібнодисперсних крапель, отримуючи при цьому ефективне зволоження з мінімальними енерговитратами. Оснащення мікропроцесорного контролера сенсорною панеллю дозволяє постійно контролювати необхідні робочі параметри роботи комплексу, що призводить до економії часу та ресурсів. Світлодіодні панелі розташовані всередині циліндричного блока таким чином, що кожна секція світильника знаходиться в площині обертання відповідного лотка касети, що призводить до того, що рослини, які розміщені в окремо взятому лотку, обертаючись разом із циліндричним блоком, рухаються вздовж усієї секції світильника. Виконання світильника у вигляді світлодіодних панелей зі світлодіодами різного спектра з наступним відношенням спектрів: блакитний 460nm/ червоний 660nm/ білий 10000-12000К/ ультрафіолетовий UVA/B 380nm=3/25/7/1 надає можливість рослинам, що обертаються разом із циліндричним блоком, отримувати максимальну кількість світла кожного спектра, що, в свою чергу, сприяє більш ефективному використанню світла та збільшенню врожайності. Розміщення всередині циліндричного блока додаткової конструкції у вигляді коридорупроходу з боковими відсіками дозволяє отримати додаткову корисну площу. При цьому стає можливо закріпити на каркасі коридору-проходу світильник, додаткові ємності з живильним розчином та інше встановлене обладнання, що, в свою чергу, мінімізує робочий простір, робить комплекс більш компактним та раціонально влаштованим. Виконання касети для ґрунтового субстрату (далі - касети) розбірною та такою, що містить каркас, два ролики та лотки, надає можливість приєднувати до каркаса або від'єднувати від нього кожен заповнений ґрунтовим субстратом лоток, незалежно один від одного. В свою чергу, це надає можливість лотки із субстратом і з висадженим насінням заготовлювати заздалегідь, та, при необхідності, відразу встановлювати їх у касету, попередньо знявши лотки із вже готовою продукцією, що автоматизує та спрощує виробничий процес. Виконання зачіпного механізму приймального вузла таким, що містить монтажну пластину, ролик зачіпний, важіль, тягу, зворотну пружину, основну пружину, гайку регулювання натягу пружини та таким, що виконаний із можливістю при обертанні циліндричного блока у зворотному напрямку тиснути на зачіп тримача касети та звільняти касету з тримача, дозволяє отримати "замок", механізм якого діє лише за рахунок обертального руху циліндричного блока, та не потребує ніяких додаткових пристосувань. Це призводить до підвищення надійності та зменшенню собівартості комплексу. Використання сенсорних датчиків, які кріпляться до елементів установки, дає можливість вимірювати показники, необхідні для оптимальної роботи установки: температуру середовища, рівень СО2, вологість, рівень рН живильного розчину тощо. Використання додаткової ємності з живильним розчином та відцентрового насоса, дозволяє подавати в робочу ємність з живильним розчином стільки рідини, скільки вбирає в себе субстрат, а після "годування" рослин розчин, що залишився, відкачувати назад в додаткову ємність. Це призводить до зменшення витрат живильного розчину в порівнянні з традиційною гідропонікою, тобто до його економії. А завдяки розміщенню додаткової ємності з живильним розчином вище за робочу ємність з живильним розчином, наповнення останньої відбувається без використання насоса (самопливом), що призводить до економії електроенергії. Автоматизація процесу відбувається за рахунок встановленого на установці пульта керування з мікропроцесорним контролером, з'єднаним із сенсорними датчиками, який має можливість автоматичного накопичення та збереження даних на SD карту, передачу та прийом даних від оператора наступними способами зв'язку: LAN-порт, RS485/RS232-порты, MODBUS, TCP та mini-USB, що дозволяє забезпечити двосторонній зв'язок контролера з оператором у вигляді віддаленого контролю та управління. Пульт керування здійснює автоматичний контроль роботи двигуна, підтримання заданого рівня рН, керування підготовкою розчина, контроль за його температурою та подачею в ємність з живильним розчином, контроль температури та вологості всередині циліндричного блока, керування подачею вуглекислого газу, on-line відеореєстрацію росту рослин тощо. Зміна програмного наповнення контролера не вимагає безпосереднього підключення контролера до комп'ютера. Навіть повне оновлення програмного забезпечення можливе за допомогою 3 UA 104757 U 5 10 15 20 25 30 35 40 45 50 55 вбудованих комунікаційних портів зв'язку: LAN-порт, RS485/RS232-порты, MODBUS, TCP та mini-USB, що дозволяє в найкоротші терміни вносити зміни в програму, відповідно економити час. При роботі комплексу "людський фактор" зведений до мінімуму. Участь людини (робочого персоналу) необхідна при стартовому завантаженні та збиранні готового врожаю, а також при проведенні планового технологічного обслуговування комплексу, при цьому можливе поєднання автоматичної установки з роботизованою лінією закладки насіннєвого матеріалу з живильним розчином і подальшим збиранням готового врожаю. Відокремлення циліндричного блока, рами та приймального вузла від зовнішнього середовища за допомогою легкого каркаса, вкритого ПВХ плівкою та/або листами полікарбонату дозволяє створити сприятливі умови всередині блока, що також призводить до економії енергоресурсів. Установка може бути розміщена на додатковій рамі. Кількість таких установок визначається розмірами приміщення, потужністю приводу та бажаною продуктивністю, а приміщення може бути як стаціонарне, так і збірно-розбірним, із дахом, що відкривається. Суть корисної моделі пояснюється наступними зображеннями: Фіг. 1 - загальний вигляд комплексу, де: 1 - рама, 2 - привідне колесо з шестеренчастою парою, 3 - приймальний вузол, 4 - зачіпний механізм, 5 - конструкція коридору-проходу, 6 циліндричний блок, 7 - касета, 8 - тримач касети, 9 - світильник, 10 - робоча ємність з живильним розчином, 11 - додаткова ємність з живильним розчином. Фіг. 2 - загальний вигляд рами, приймального вузла та конструкції коридору-проходу, де: 1 рама, 3 - приймальний вузол, 5 - конструкція коридору-проходу; Фіг. 3 - загальний вигляд комплексу збоку; Фіг. 4 - загальний вигляд тримача касети, де: 12 - каркас, 13 - з'єднувальний вал, 14 монтажне вухо, 15 - зачіп, 16 - натискач, 17 - зворотна пружина, 18 - стопор-відбійник; Фіг. 5 - загальний вигляд зачіпного механізму, де: 19 - монтажна пластина, 20 - зачіпний ролик, 21 - важіль, 22 - тяга, 23 - основна пружина, 24 - гайка регулювання натягу пружини; Фіг. 6 - загальний вигляд приймального вузла, де: 4 - зачіпний механізм, 25 - направляюча рейка, підтримуюче колесо, 26 - каркас, 27 - опора, 28 - місце з'єднання з рамою; Фіг. 7 - загальний вигляд касети, де: 29 - каркас, 30 - ролик, 31 - лоток. Комплекс програмних та технічних засобів автоматизованого вирощування рослин ΈΒΑ" працює наступним чином. Касети (7) ґрунтовим субстратом, в якому знаходяться заздалегідь висадженні насіння (або здійснюється висадження безпосередньо в розташований в касеті субстрат), завантажують в циліндричний блок (6), що знаходиться на рамі (1). Після завантаження всіх касет (7) вмикається основний режим роботи комплексу, при якому вмикається привідне колесо з шестеренчастою парою (2) світильник (9), пульт керування, який здійснює опитування всіх задіяних сенсорів та виконує необхідні процедури з налагодження необхідних параметрів середовища вирощування (коригування температури, вологості та подача живильного розчину). При цьому циліндричний блок (6) знаходиться в режимі обертання зі швидкістю, встановленою програмою. Швидкість обертання циліндричного блока (6) контролюється за допомогою сенсора шляхом вимірювання часу проходження контрольних точок. При відсутності сигналу сенсора понад встановленого проміжку часу контролер переходить в аварійний режим (зупинка всіх систем, індикація аварії на пульті керування та оповіщення оператора за допомогою встановлених комунікаційних портів: LAN-порт, RS485/RS232-порты, MODBUS, TCP та miniUSB). Живлення рослин розчином відбувається в періоди, встановлені програмою. Після отримання програмної команди контролер вмикає електромагнітний клапан, та рідина із додаткової ємності з живильним розчином (11) надходить до робочої ємності з живильним розчином (10) до рівня, який контролюється поплавковим датчиком. Рівень живильного розчину в додатковій ємності контролюється тензометричним датчиком, встановленим під цією ємністю. Система постійно здійснює виміри рівню рН, EC, температури та, при необхідності, коригує його за допомогою хімреагентів та дозувального насоса. Після пройденого етапу годування, тривалість якого встановлена програмою, залишки розчину за допомогою відцентрового насоса відкачуються назад до додаткової ємності з живильним розчином (11). Рівень живильного розчину в робочій ємності (10) також контролюється і, при знижені його менше встановленого мінімуму, система одразу про це повідомляє оператора. Контроль вологості здійснюється за допомогою сенсорного датчика, який встановлено всередині циліндричного блока (6). При знижені вологості нижче встановленого рівня система 4 UA 104757 U 5 10 15 20 25 30 35 40 45 50 55 60 дає команду на увімкнення генератора туману. Рівень води в генераторі туману також контролюється. Датчик СО2, який встановлено всередині циліндричного блока (6), відповідає за контроль рівня вуглекислого газу. При необхідності система вмикає реле електромагнітного клапана і газ починає потрапляти в зону росту рослин. Для безпечної роботи оператора в зоні обслуговування рівень СО2 також контролюється, і при збільшені його вище граничнодопустимої концентрації система одразу повідомляє оператора. Циліндричний блок та рама з приймальним вузлом відокремлені від зовнішнього середовища за допомогою легкого каркаса, вкритого ПВХ плівкою та/або листами полікарбонату, що дає змогу створити сприятливі умови всередині блока. Після дозрівання врожаю вмикається режим вивантаження, при якому циліндричний блок (6) починає обертатись в зворотному напрямку (проти годинникової стрілки). Натискачем (16) тримач касети входить в контакт з зачіпним роликом (20) відкривального механізму. Зачіпний ролик (20) утримується у нерухомому стані під дією основної пружини (23) та зрушує з місця натискач (16) із зачепом (15) який, рухаючись, обертає з'єднувальний вал (13) та призводить до руху зачіп на протилежному боці тримача касети. Долаючи опір зворотної пружини (17), зачіп (15) обертається навколо осі до граничного положення, в якому циліндричні виступи на роликах (30) касети вивільнюються і касета (7) під дією тяжіння опускається роликами (30) на направляючі рейки (25). Далі обертальний рух циліндричного блока призводить до поступального руху касети, яка займає горизонтальне положення. В цей час натискач (16) виходить з контакту із зачіпним роликом (20), та під дією зворотної пружини (17) займає першочергове положення, обмежене стопором-відбійником (18). При увімкненні режиму завантаження, циліндричний блок (6), обертаючись за годинниковою стрілкою, тягне касету (7). Касета (7), рухаючись по направляючих рейках (25), підіймається та заходить в тримач. Циліндричні виступи на роликах (30) починають тиснути на зачіп (15). Зачіп (15) має таку форму, яка дозволяє йому відхилятись під дією тиску циліндричного виступу ролика (30). Продовжуючи рух, циліндричний виступ потрапляє в паз зачепа (15), зачіп (15) вертається в положення, обмежене стопором-відбійником (18),тим самим блокуючи касету (7). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Комплекс програмних та технічних засобів автоматизованого вирощування рослин, що містить приймальний вузол із зачіпними механізмами та оснащену приводами раму, на якій встановлено рухомий циліндричний блок, твірна поверхня якого виконана у вигляді знімних касет для ґрунтового субстрату, світильник, розташований всередині циліндричного блока, робочу ємність з живильним розчином, розташовану в нижній частині рами, принаймні одну додаткову ємність з живильним розчином, балон із СО2, насос, датчики, що фіксують показники роботи комплексу, генератор туману ультразвукового типу, пульт керування, що містить мікропроцесорний контролер, з'єднаний із сенсорними датчиками, який контролює процес живлення рослин і виконаний з можливістю отримання та обробки показників роботи комплексу та подальшого коригування його роботи за заданими параметрами, при цьому кожна касета для ґрунтового субстрату розташована своєю площиною перпендикулярно до нормалі поверхні циліндричного блока та закріплена до циліндричного блока за допомогою двох осей з одного боку та принаймні одного тримача з іншого, тримач виконаний з можливістю автоматичного вивантаження касети для ґрунтового субстрату при обертанні циліндричного блока у зворотному напрямку, який відрізняється тим, що привод містить передачу у вигляді шестеренчастої пари, генератор туману містить систему лабіринтових каналів із проміжними решітками - краплевловлювачами та випарними сітками, мікропроцесорний контролер оснащений сенсорною панеллю, світильник виконаний у вигляді світлодіодних панелей зі світлодіодами різного спектра, об'єднаних у секції, та додатково містить конструкцію у вигляді коридору-проходу, який розташований всередині циліндричного блока, при цьому світильник, додаткові ємності з живильним розчином та інше встановлене обладнання кріпляться на каркасі коридору-проходу. 2. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що касета для ґрунтового субстрату виконана розбірною та складається із каркаса, двох роликів та лотків. 3. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що тримач касети для ґрунтового субстрату містить каркас, з'єднувальний вал, монтажне вухо, зачіп, натискач, що встановлюється відповідно до сторони монтажу тримача, зворотну пружину, стопор-відбійник. 5 UA 104757 U 5 10 15 20 25 30 35 4. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за пп. 1-3, який відрізняється тим, що зачіпний механізм приймального вузла містить монтажну пластину, ролик зачіпний, важіль, тягу, зворотну пружину, основну пружину, гайку регулювання натягу пружини та виконаний із можливістю при обертанні циліндричного блока у зворотному напрямку тиснути на зачіп тримача касети для ґрунтового субстрату та звільняти її з тримача. 5. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що світлодіодні панелі світильника розташовані всередині циліндричного блока таким чином, що кожна секція світильника знаходиться в площині обертання відповідного лотка касети для ґрунтового субстрату. 6. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що світлодіодні панелі світильника мають світлодіоди різного спектра з наступним відношенням спектрів: блакитний 460 nm/червоний 660 nm/білий 10000-12000 К/ультрафіолетовий UVA/B 380 nm=3/25/7/1. 7. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що секція світильника виконана у формі половини восьмигранника, причому світлодіоди розташовані на кожній грані світильника. 8. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що містить відцентровий та дозувальний насоси. 9. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що мікропроцесорний контролер виконаний з можливістю автоматичного накопичення та збереження даних на SD карту, передачі та прийому даних від оператора наступними способами зв'язку: LAN-порт, RS485/RS232-порти, MODBUS, TCP та mini-USB. 10. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що містить систему підготовки живильного розчину, яка складається із ємності з хімічними реагентами, датчиків рН, ЕС та температури та дозувального насоса. 11. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за п. 1, який відрізняється тим, що для вимірювання кількості живильного розчину в додатковій ємності, кількості води в ємності, яка живить генератор туману та кількості газу СО 2 у балоні, під відповідними ємностями встановлені тензометричні датчики. 12. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за пп. 111, який відрізняється тим, що циліндричний блок, рама та приймальний вузол відокремлені від зовнішнього середовища за допомогою легкого каркаса, вкритого ПВХ плівкою та/або листами полікарбонату. 13. Комплекс програмних та технічних засобів автоматизованого вирощування рослин за пп. 112, який відрізняється тим, що виконаний як окремий елемент, який встановлений на додатковій рамі з розрахунковою кількістю таких елементів, відповідно до розмірів приміщення. 6 UA 104757 U 7 UA 104757 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A01G 31/02, A01G 31/00
Мітки: програмних, ева, автоматизованого, комплекс, засобів, технічних, рослин, вирощування
Код посилання
<a href="https://ua.patents.su/10-104757-kompleks-programnikh-ta-tekhnichnikh-zasobiv-avtomatizovanogo-viroshhuvannya-roslin-eva.html" target="_blank" rel="follow" title="База патентів України">Комплекс програмних та технічних засобів автоматизованого вирощування рослин “ева”</a>
Комплекс технічних і програмних засобів контролю характеристик експлуатації транспортного засобу
Номер патенту: 39251
Опубліковано: 10.02.2009
Автори: Пашкевич Леонід Полікарпович, Новіков Юрій Юрійович
МПК: G07C 5/00
Мітки: транспортного, характеристик, засобу, контролю, комплекс, програмних, технічних, засобів, експлуатації
Формула / Реферат:
1. Комплекс технічних і програмних засобів контролю характеристик експлуатації транспортного засобу, що включає систему обробки даних, який відрізняється тим, що містить датчики, індикатор та шафу обчислювальної техніки, що включає модем GSM, блок живлення, бортовий комп'ютер з модулем GPS, блок збору інформації, рівнемір-сигналізатор ультразвуковий, при цьому шафа обчислювальної техніки за допомогою антени з'єднана з центральним...
Комплекс технічних засобів автоматизації диспетчерського пункту шахти
Номер патенту: 43808
Опубліковано: 25.08.2009
Автори: Курносов Вячеслав Григорович, Ященко Ігор Олексійович, Вінарик Анатолій Абрамович, Сіненко Віктор Васильович, Мілосердов Володимир Володимирович, Брюханов Олександр Михайлович, Іванов Юрій Олександрович
МПК: E21C 35/24
Мітки: засобів, пункту, автоматизації, диспетчерського, шахті, комплекс, технічних
Формула / Реферат:
Комплекс технічних засобів автоматизації диспетчерського пункту шахти, який містить пульт управління, підключений до першого входу автоматизованого робочого місця диспетчера на поверхні шахти, вихід останнього з'єднаний з входом екрана колективного користування, а другий вхід підключений до першого входу комутатора мережі, другий вхід якого підключено до входів автоматизованих робочих місць служб шахти, третій - до входу сервера безпеки...
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту
Номер патенту: 49923
Опубліковано: 11.05.2010
Автор: Сендецький Микола Миколайович
МПК: G06F 7/00, G06F 5/00, G05B 15/00
Мітки: складних, систем, проектування, транспорту, технічних, залізничного, автоматизований, засобів, комплекс
Формула / Реферат:
Автоматизований комплекс проектування складних технічних систем та засобів для залізничного транспорту, що містить командний блок постановки завдань і керування процесом формування об'єкта, систему обґрунтування рівня якості створюваного об'єкта, систему формування виду перспективного складного об'єкта, центральну систему введення даних, підсистему вибору оптимального варіанта техніко-економічних вимог та тактико-технічних вимог і...
Комплекс технічних засобів охорони об’єкта “заграва”
Номер патенту: 40270
Опубліковано: 25.03.2009
Автори: Репешко Борис Олександрович, Єлєніч Іван Андрійович
МПК: G08B 25/00, G08B 26/00
Мітки: засобів, технічних, об'єкта, заграва, комплекс, охорони
Формула / Реферат:
Комплекс технічних засобів охорони об'єкта, що містить пристрої опитування датчиків виявлення, телефонну станцію диспетчерського зв'язку з абонентами, систему гучномовного зв'язку з гучномовцями, інформаційні табло, систему відеоспостереження з відеосервером, відеокамерами та моніторами, систему освітлення території охорони об'єкта, систему обробки, відображення та архівації аудіо- та відеоінформації, що включає два комп'ютери (чергового...
Пристрій для моделювання оцінки надійності програмних засобів
Номер патенту: 36399
Опубліковано: 16.04.2001
Автор: Зеленков Олександр Аврамович
МПК: G06G 7/48
Мітки: програмних, надійності, засобів, оцінки, пристрій, моделювання
Текст:
...до виходу третього ПЗП 4. Виходи першої 9 і другої 10 схем І підключені відповідно до першого і другого входів др угого елемента АБО 11, вихід якого підключений до першого входу другої схеми порівняння 12 і інформаційного входу першого регістра 1, вхід скидання якого з'єднаний із входом лічильника 13. Інформаційний вхід накопичуючого суматора 14 підключено до виходу четвертого ПЗП 5, а вихід з'єднаний з першим входом блока ділення 16,...
Попередній патент: Полімерна композиція на основі вторинної сировини
Наступний патент: Спосіб виробництва насіння соняшнику
Випадковий патент: Вузол закріплення крупногабаритних конструкцій