Гідролокатор бокового огляду
Номер патенту: 105592
Опубліковано: 26.05.2014
Автори: Федосеєнков Сергій Геннадійович, Гончар Анатолій Іванович, Сафонов Олександр Валерійович, Клочан Валентина Іванівна, Шличек Любов Іванівна, Клочан Юрій Анатолійович
Формула / Реферат
Гідролокатор бокового огляду, який містить антену, комутатор приймання-передачі, передавальний тракт, перший формувач зондувального імпульсу з лінійною частотною модуляцією, приймальний тракт, перший багатоканальний корелятор для прийому сигналів з лінійною частотною модуляцією та пристрій відображення інформації, причому антена через комутатор прийому передачі підключена до виходу передавального тракту і входу приймального тракту, вхід передавального тракту з'єднаний з першим виходом першого формувача зондувального імпульсу з лінійною частотною модуляцією, вихід приймального тракту з'єднаний з першим входом першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, другий вхід першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний із другим виходом формувача з лінійною частотною модуляцією зондувального імпульсу, вихід першого багатоканального коррелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний із пристроєм відображення інформації, який відрізняється тим, що додатково містить другий формувач лінійно-частотної модуляції зондувального імпульсу, другий багатоканальний корелятор для прийому сигналів з лінійною частотною модуляцією, пристрій кореляційної обробки й пристрій визначення глибини осторонь від судна, причому перший вихід другого формувача лінійно-частотної модуляції зондувального імпульсу з'єднаний із другим входом передавального тракту, другий вихід формувача лінійно-частотної модуляції зондувального імпульсу з'єднаний з першим входом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід приймального тракту з'єднаний також із другим входом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний з першим входом пристрою кореляційної обробки, другий вхід пристрою кореляційної обробки з'єднаний з виходом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід пристрою кореляційної обробки з'єднаний із пристроєм визначення глибини осторонь від судна, вихід якого з'єднаний із другим входом пристрою відображення інформації.
Текст
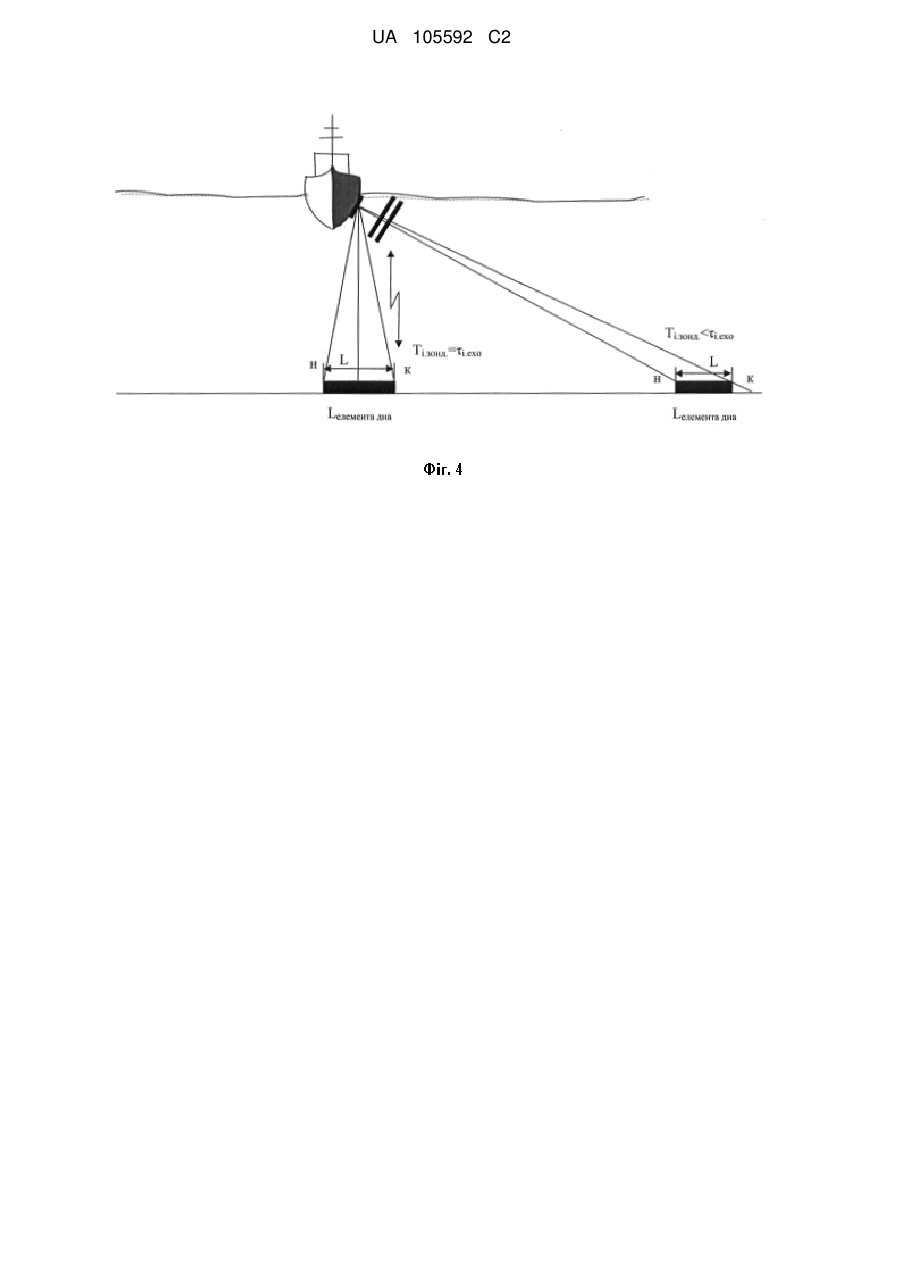
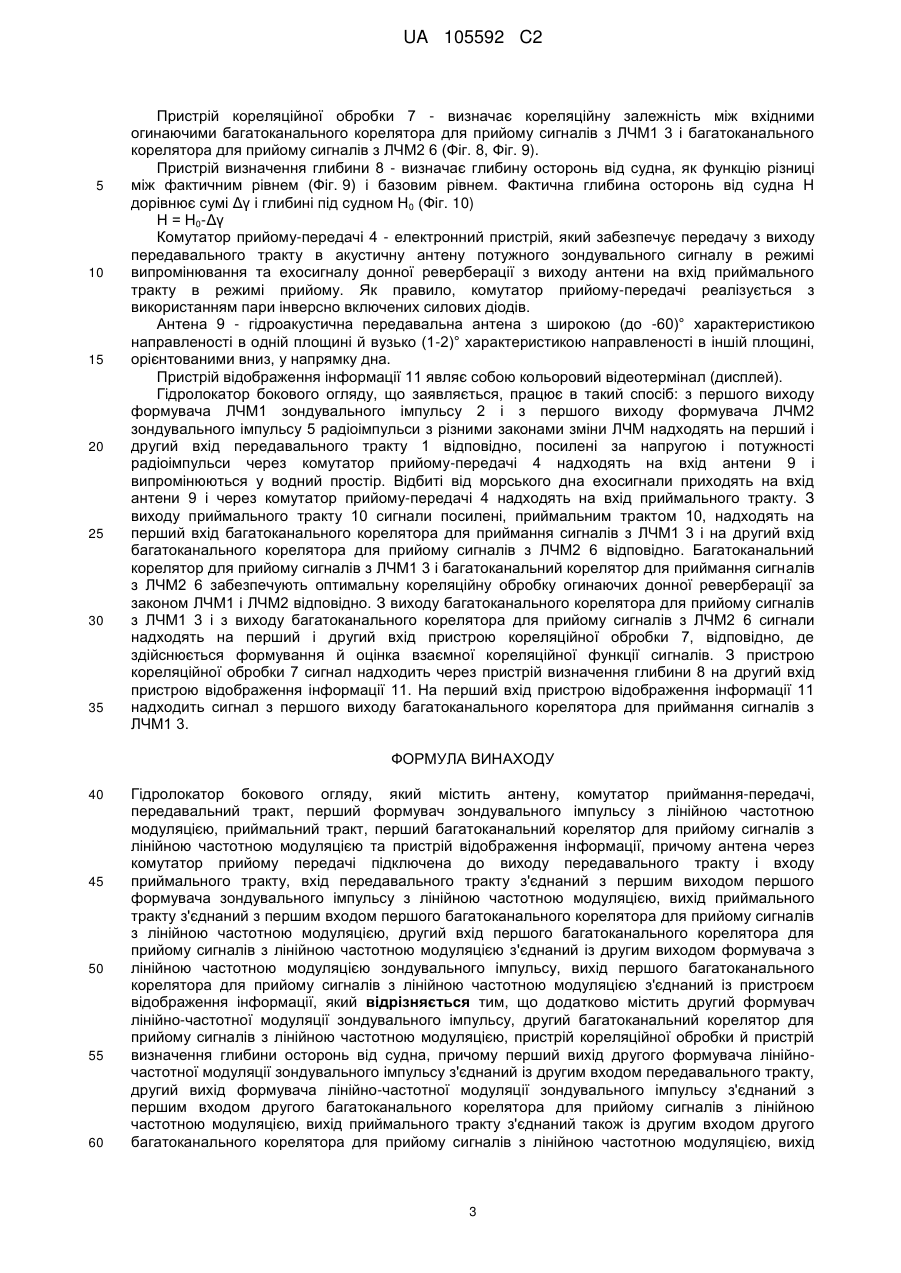
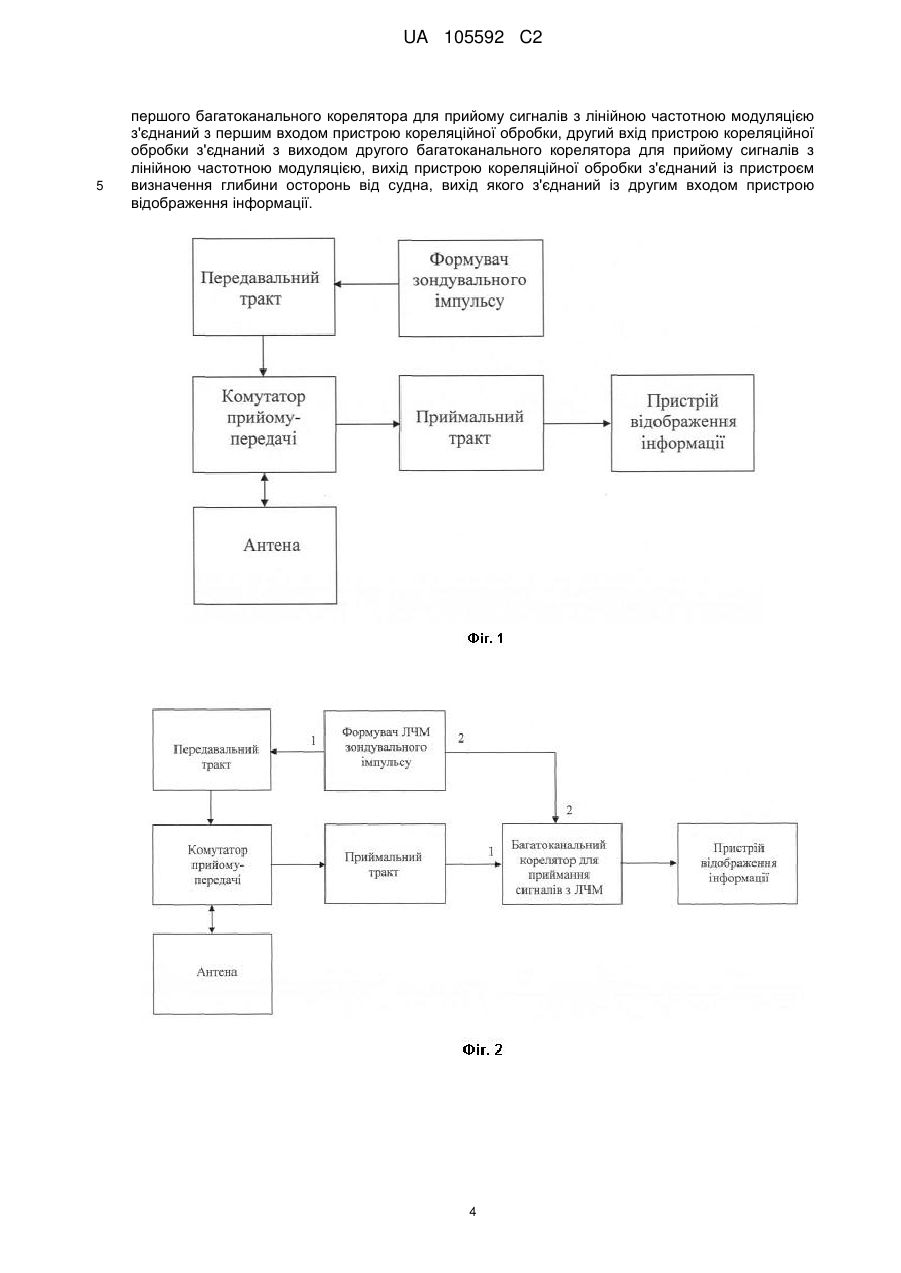
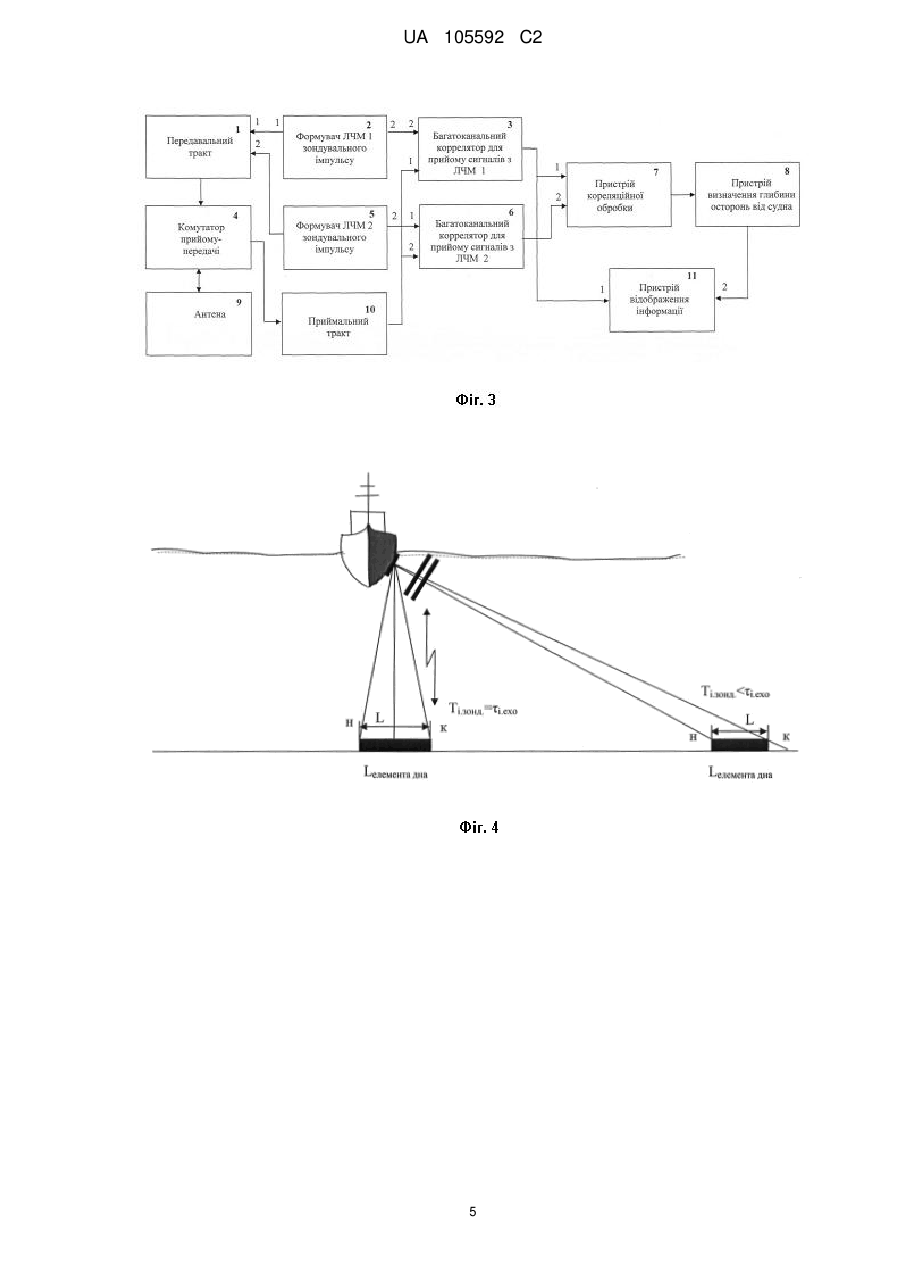
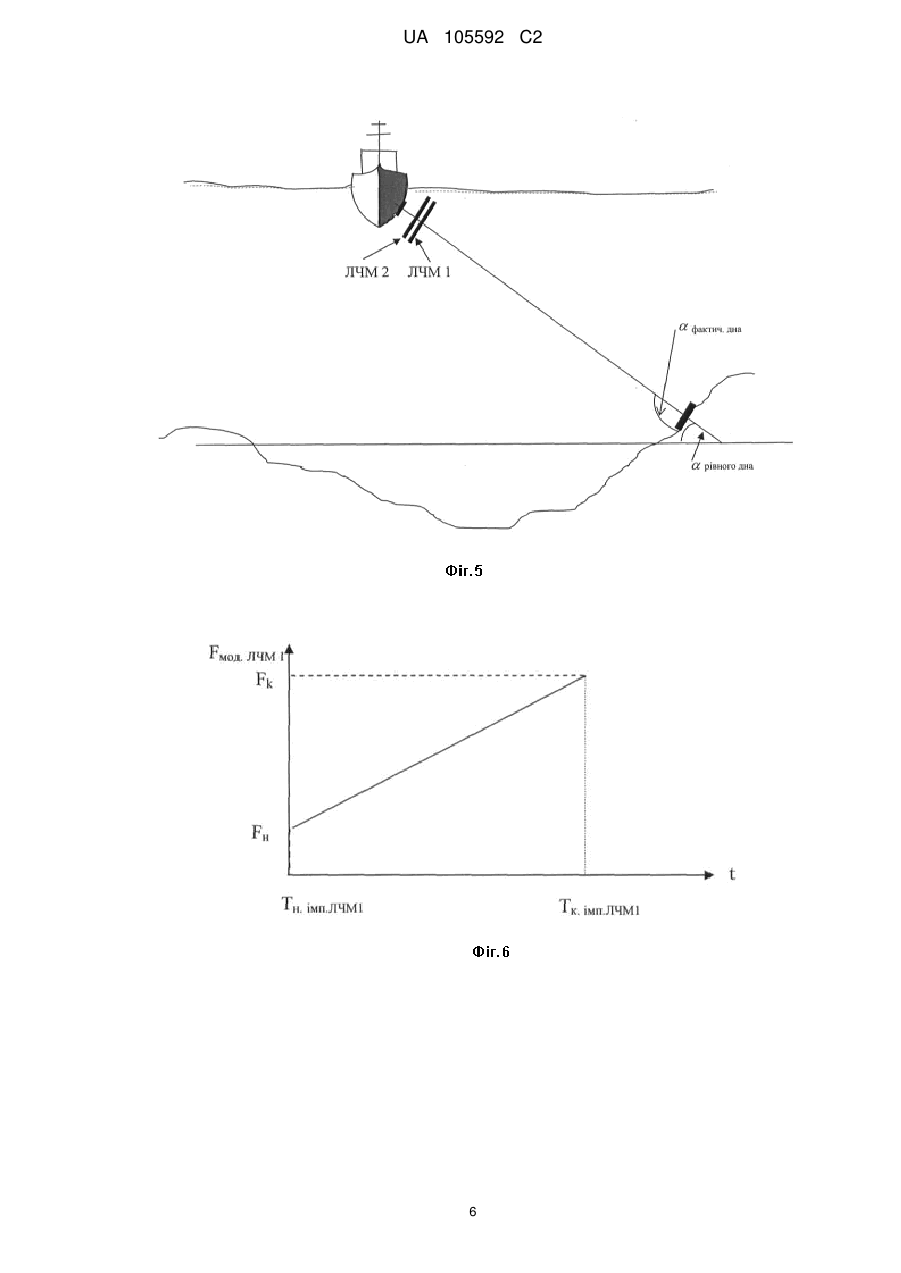
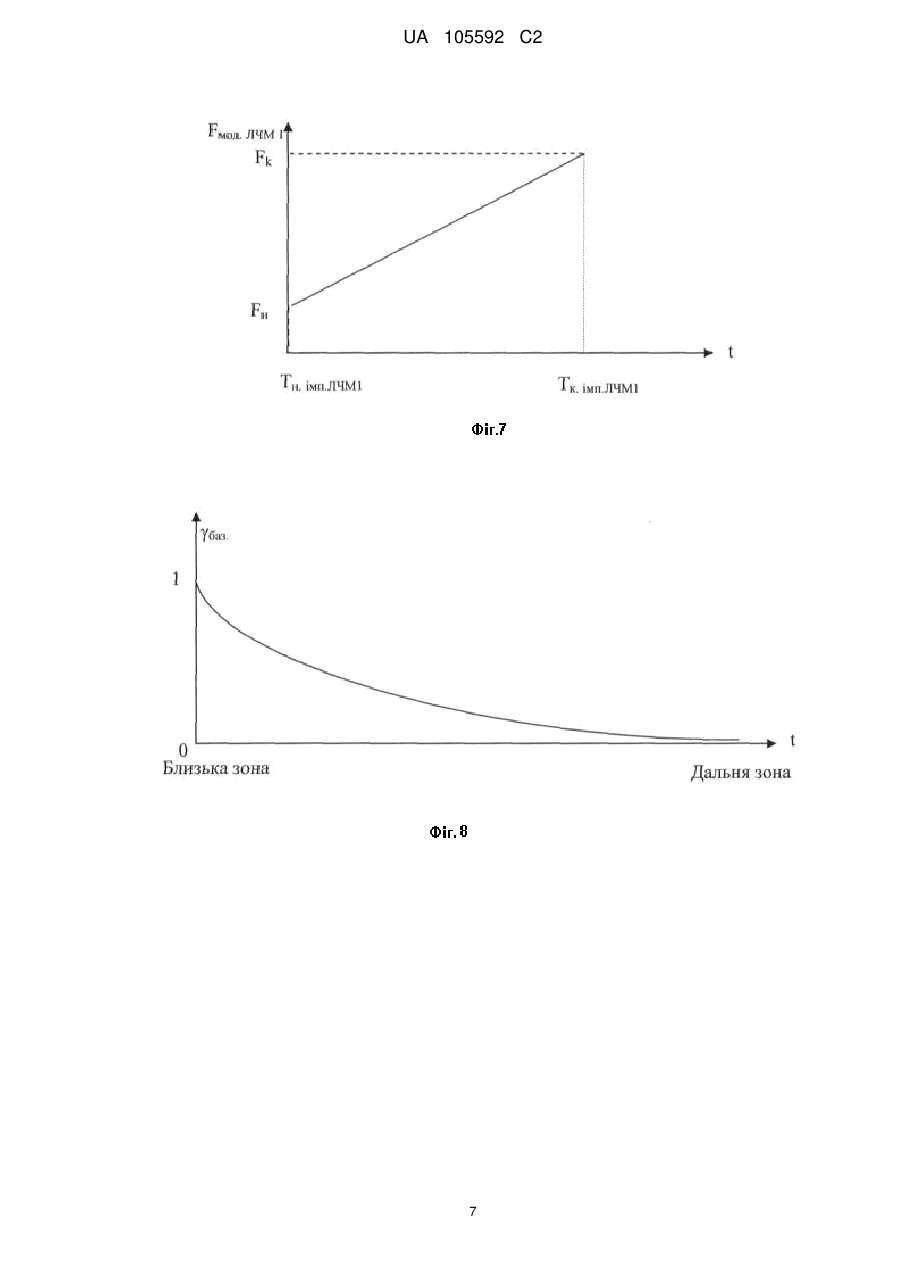
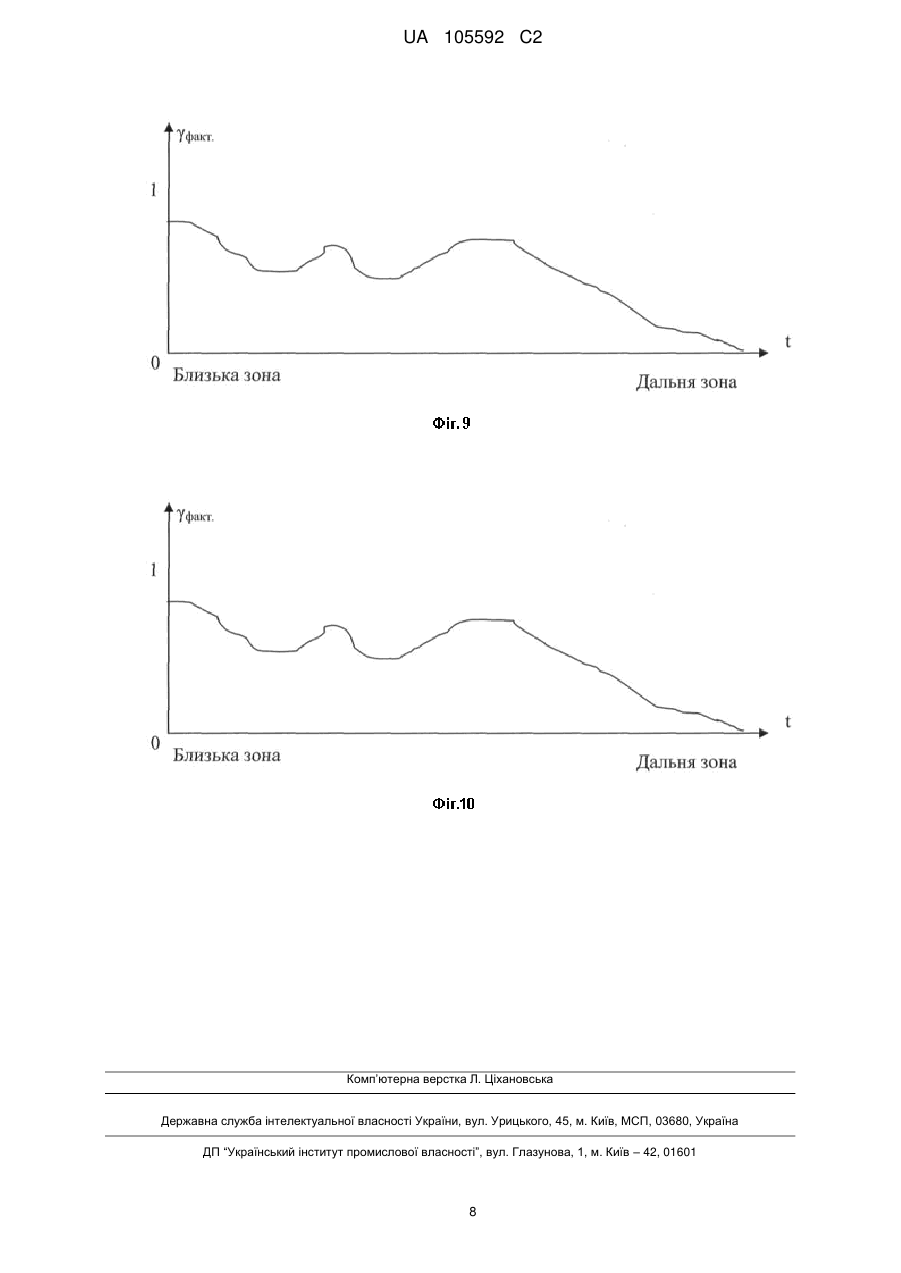
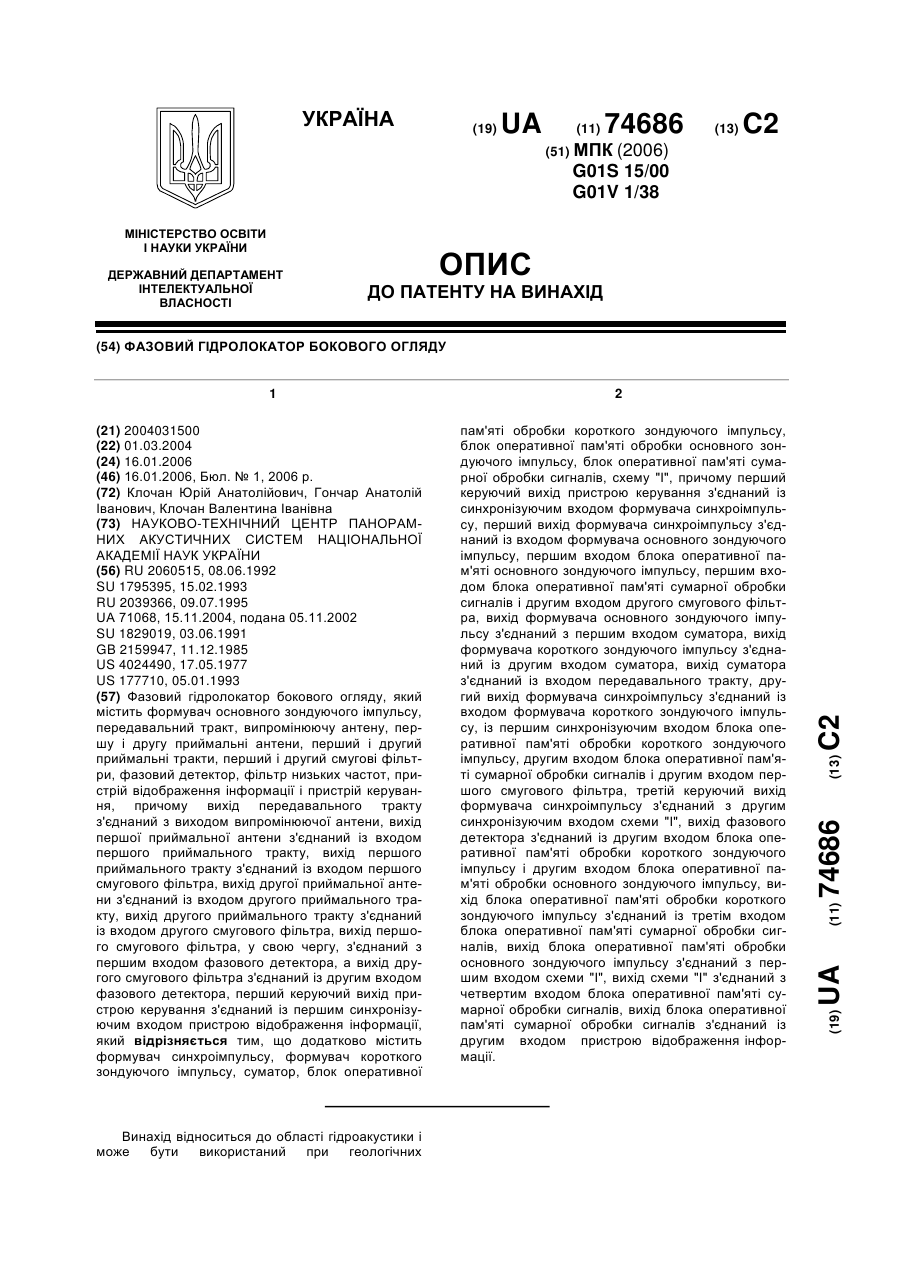
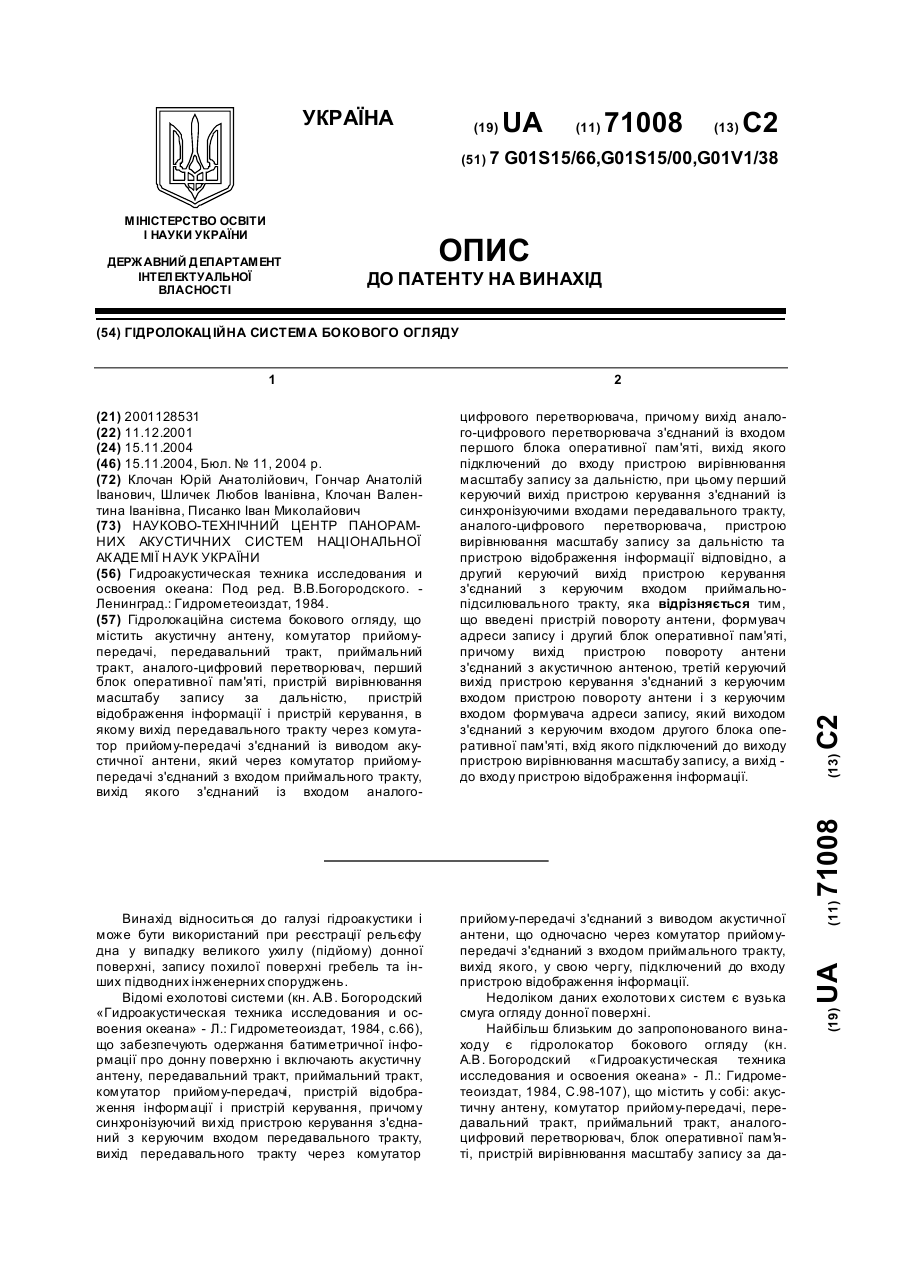
Реферат: Винахід належить до області гідроакустики і може бути використаний при геологічних дослідженнях морського дна. Гідролокатор бокового огляду, містить утримуючу антену, комутатор приймання-передачі, передавальний тракт, два формувачі зондувального імпульсу з лінійною частотною модуляцією, приймальний тракт, два багатоканальних корелятори для прийому сигналів з лінійною частотною модуляцією та пристрій відображення інформації, пристрій кореляційної обробки й пристрій визначення глибини осторонь від судна. Технічним результатом винаходу є отримання даних щодо глибин осторонь від судна. UA 105592 C2 (12) UA 105592 C2 UA 105592 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі гідроакустики і може бути використаний при геологічних дослідженнях морського дна. Відомий гідролокатор бокового огляду [кн. Богородский. Гидроакустическая техника исследования и освоения океана. - Л.: Гидрометеоиздат, 1984. - С. 136-137], який призначений для гідролокаційної зйомки донної поверхні, і містить у собі антену, комутатор прийомупередачі, передавальний тракт, формувач зондувального імпульсу, приймальний тракт і пристрій відображення інформації, причому вихід антени гідролокатора бокового огляду через комутатор прийому-передачі підключений до виходу передавального тракту та входу приймального тракту, вихід приймального тракту підключений до входу пристрою відображення інформації, вхід передавального тракту підключений до виходу формувача зондувального імпульсу. Недоліком даного гідролокатора бокового огляду є низькі енергетичні характеристики і неможливість одержання даних про глибину осторонь від судна. Найбільш близьким до пропонованого пристрою є гідролокатор бокового огляду з використанням складних зондувальних сигналів, наприклад сигналів з лінійною частотною модуляцією (ЛЧМ) [Тихонов В.І. Статистическая радиотехника. М.:изд. "Советское радио", 1966. - C. 564-568, Колчеданцев А.С. Гидроакустические станции. - Л.:Судостроение, 1982. - C. 115117], який містить у собі антену, комутатор прийому-передачі, передавальний тракт, формувач ЛЧМ зондувального імпульсу, приймальний тракт, багатоканальний корелятор для приймання сигналів з ЛЧМ та пристрій відображення інформації, причому вивід антени через комутатор прийому-передачі з'єднаний з виходом передавального тракту і входом приймального тракту, вихід приймального тракту з'єднаний з першим входом багатоканального корелятора для прийому сигналів з ЛЧМ, вхід передавального тракту з'єднаний з першим виходом формувача ЛЧМ зондувального імпульсу, другий вихід формувача ЛЧМ зондувального імпульсу з'єднаний із другим входом багатоканального корелятора для прийому сигналів з ЛЧМ, вихід багатоканального корелятора для прийому сигналів з ЛЧМ з'єднаний із входом пристрою відображення інформації. Недоліком даного пристрою є неможливість одержання даних про глибину осторонь від судна. Задачею винаходу є одержання даних про глибину осторонь від судна. Поставлена задача вирішується за рахунок того, що у гідролокатор бокового огляду, що містить антену, комутатор прийому-передачі, передавальний тракт, формувач ЛЧМ1 зондувального імпульсу, приймальний тракт, багатоканальний корелятор для приймання сигналів з ЛЧМ1 і пристрій відображення інформації, причому антена через комутатор прийомупередачі підключена до виходу передавального тракту та входу приймального тракту, перший вхід передавального тракту з'єднаний з першим виходом формувача ЛЧМ1 зондувального імпульсу, вихід приймального тракту з'єднаний з першим входом багатоканального корелятора для прийому сигналів з ЛЧМ1, другий вхід багатоканального корелятора для прийому сигналів з ЛЧМ1 з'єднаний із другим виходом формувача ЛЧМ1 зондувального імпульсу, вихід першого багатоканального корелятора для приймання сигналів з ЛЧМ1 з'єднаний з першим входом пристрою відображення інформації, який відрізняється тим, що з метою одержання даних про глибини осторонь від судна в нього введені: формувач ЛЧМ2 зондувального імпульсу, другий багатоканальний корелятор для прийому сигналів з ЛЧМ2, пристрій кореляційної обробки та пристрій визначення глибини осторонь від судна, причому перший вихід формувача ЛЧМ2 зондувального імпульсу з'єднаний із другим входом передавального тракту, другий вихід формувача ЛЧМ2 зондувального імпульсу з'єднаний з першим входом багатоканального корелятора для прийому сигналів з ЛЧМ2, вихід приймального тракту з'єднаний також із другим входом багатоканального корелятора для прийомусигналів з ЛЧМ2, вихід багатоканального корелятора для приймання сигналів з ЛЧМ1 з'єднаний з першим входом пристрою кореляційної обробки, другий вхід пристрою кореляційної обробки з'єднаний із виходом багатоканального корелятора для прийому сигналів з ЛЧМ2, вихід пристрою кореляційної обробки з'єднаний із входом пристрою визначення глибини осторонь від судна, вихід якого з'єднаний із другим входом пристрою відображення інформації. При цьому бажаний ефект досягається за рахунок відмінності законів ЛЧМ в основній і додатковій системах оптимального прийому, що дає можливість розділити огинаючі їх вхідних сигналів, а потім визначити за їх взаємокореляційною залежністю глибину осторонь від судна. Фіг. 1 - структурна схема гідролокатора бокового огляду, аналог; Фіг. 2 - структурна схема гідролокатора бокового огляду, прототип; Фіг. 3 - структурна схема пропонованого гідролокатора бокового огляду; 1 UA 105592 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 4 - принцип дії пропонованого гідролокатора бокового огляду, в частині зміни тимчасової протяжності ехосигналів при рівному дні; Фіг. 5 - принцип дії пропонованого гідролокатора бокового огляду, в частині зміни часової протяжності при зміні глибини в осторонь від судна; Фіг. 6 - основний закон зміни гетеродинного ЛЧМ сигналу Фіг. 7 - додатковий гетеродинний ЛЧМ сигнал із зворотним законом зміни частоти; Фіг. 8 - базовий рівень кореляційної залежності τехо дистанції й τexo. елемента близької зони. Фіг. 9 - фактичний рівень кореляційної залежності ехо дистанції exo. елемента близької зони. Фіг. 10 - рівень зміни глибини осторонь від судна. Гідролокатор бокового огляду, що заявляється, містить: передавальний тракт 1, формувач ЛЧМ1 зондувального імпульсу 2, багатоканальний корелятор для прийому сигналів з ЛЧМ1 3, комутатор прийому-передачі 4, формувач ЛЧМ2 зондувального імпульсу 5, багатоканальний корелятор для прийому сигналів з ЛЧМ2 6, пристрій кореляційної обробки 7, пристрій визначення глибини осторонь від судна 8, антену 9, приймальний тракт 10 і пристрій відображення інформації 11, причому антена 9 через комутатор прийому-передачі 4 з'єднана з виходом передавального тракту 1 і входом приймального тракту 10, перший вхід передавального тракту 1 з'єднаний з першим виходом формувача ЛЧМ1 зондувального імпульсу 2, другий вхід передавального тракту 1 з'єднаний з першим виходом формувача ЛЧМ2 зондувального імпульсу 5, другий вихід формувача ЛЧМ1 зондувального імпульсу 2 з'єднаний із другим входом багатоканального корелятора для прийому сигналів з ЛЧМ1 3, перший вхід багатоканального корелятора для прийому сигналів з ЛЧМ1 3 з'єднаний з виходом приймального тракту 10, вихід приймального тракту 10 одночасно з'єднаний із другим входом багатоканального корелятора для прийому сигналів з ЛЧМ2 6, перший вхід багатоканального корелятора для прийому сигналів з ЛЧМ2 6 з'єднаний із другим виходом формувача ЛЧМ2 зондувального імпульсу 5, вихід багатоканального корелятора для приймання сигналів з ЛЧМ1 3 з'єднаний з першим входом пристрою кореляційної обробки 7 і першим входом пристрою відображення інформації. 11, вихід багатоканального корелятора для прийому сигналів з ЛЧМ 2 6 з'єднаний із другим входом пристрою кореляційної обробки 7, вихід пристрою кореляційної обробки 7 з'єднаний із входом пристрою глибини осторонь від судна 8, вихід пристрою визначення глибини осторонь від судна 8 з'єднаний із другим входом пристрою відображення інформації 11. Глибина осторонь від судна для заданого напрямку променя визначається відхиленням кута ковзання між гідроакустичним променем зондувального сигналу, що біжить уздовж дна, і елементом донної поверхні (обумовленим тривалістю імпульсу випромінювання і шириною характеристики антени за напрямком руху) та кутом ковзання між променем, що біжить, і ділянкою гіпотетичного рівного дна Н = f(αск факт.-(αск. рівного дна) У свою чергу, кут ковзання визначає часову довжину ехосигналів від донних об'єктів (Фіг. 4): у близькій зоні ГБО αковз. = 90° і τехо = τвипр.; у далекій зоні ГБО αковз.→0° і τехо→τмах. = τдна елемента. Для визначення зміни часової довжини ехосигналу уздовж дистанції гідролокатора бокового огляду пропонується використовувати значення відхилення взаємної кореляції ревербераційних процесів для двох послідовно випроменених зондувальних імпульсів від базової залежності τ ехо. елемента = f(Rдальності) ВІД дистанції осторонь від судна для гіпотетично рівного дна (Фiг. 4, Фiг. 8) Для максимального розподілу сигналів донної реверберації від основного та від додаткового зондувальних імпульсів використовуються ЛЧМ сигнали зі зворотними законами модуляції. Для цього формувач зондувальних імпульсів ЛЧМ1 за виходами 1 і 2 видає гетеродинний ЛЧМ сигнал із законом зміни частоти коливань зворотним закону зміни частоти основного гетеродинного ЛЧМ2 сигналу (Фiг. 6, Фiг. 7). Передавальний тракт 1 - містить передкінцеві і кінцеві каскади посилення зондувальних імпульсів. Формувач ЛЧМ1 зондувального імпульсу 2 і формувач ЛЧМ2 зондувального імпульсу 5 формують зондувальні імпульси у вигляді імпульсів з лінійною частотною модуляцією несучої частоти (Фіг. 7). Багатоканальний корелятор для прийому сигналів з ЛЧМ1 3 і багатоканальний корелятор для приймання сигналів з ЛЧМ2 6 - виконують завдання багатоканального корелятора [Тихонов В.І. Статистическая радиотехника. - М.: изд. "Советское радио", 1966 - С. 564-5689.; Колчеданцев А.С. Гидроакустические станции. - Л.: Судостроение, 1982. - С. 115-117]. 2 UA 105592 C2 5 10 15 20 25 30 35 Пристрій кореляційної обробки 7 - визначає кореляційну залежність між вхідними огинаючими багатоканального корелятора для прийому сигналів з ЛЧМ1 3 і багатоканального корелятора для прийому сигналів з ЛЧМ2 6 (Фіг. 8, Фіг. 9). Пристрій визначення глибини 8 - визначає глибину осторонь від судна, як функцію різниці між фактичним рівнем (Фіг. 9) і базовим рівнем. Фактична глибина осторонь від судна Н дорівнює сумі Δγ і глибині під судном Н0 (Фіг. 10) Н = Н0-Δγ Комутатор прийому-передачі 4 - електронний пристрій, який забезпечує передачу з виходу передавального тракту в акустичну антену потужного зондувального сигналу в режимі випромінювання та ехосигналу донної реверберації з виходу антени на вхід приймального тракту в режимі прийому. Як правило, комутатор прийому-передачі реалізується з використанням пари інверсно включених силових діодів. Антена 9 - гідроакустична передавальна антена з широкою (до -60)° характеристикою направленості в одній площині й вузько (1-2)° характеристикою направленості в іншій площині, орієнтованими вниз, у напрямку дна. Пристрій відображення інформації 11 являє собою кольоровий відеотермінал (дисплей). Гідролокатор бокового огляду, що заявляється, працює в такий спосіб: з першого виходу формувача ЛЧМ1 зондувального імпульсу 2 і з першого виходу формувача ЛЧМ2 зондувального імпульсу 5 радіоімпульси з різними законами зміни ЛЧМ надходять на перший і другий вхід передавального тракту 1 відповідно, посилені за напругою і потужності радіоімпульси через комутатор прийому-передачі 4 надходять на вхід антени 9 і випромінюються у водний простір. Відбиті від морського дна ехосигнали приходять на вхід антени 9 і через комутатор прийому-передачі 4 надходять на вхід приймального тракту. З виходу приймального тракту 10 сигнали посилені, приймальним трактом 10, надходять на перший вхід багатоканального корелятора для приймання сигналів з ЛЧМ1 3 і на другий вхід багатоканального корелятора для прийому сигналів з ЛЧМ2 6 відповідно. Багатоканальний корелятор для прийому сигналів з ЛЧМ1 3 і багатоканальний корелятор для приймання сигналів з ЛЧМ2 6 забезпечують оптимальну кореляційну обробку огинаючих донної реверберації за законом ЛЧМ1 і ЛЧМ2 відповідно. З виходу багатоканального корелятора для прийому сигналів з ЛЧМ1 3 і з виходу багатоканального корелятора для прийому сигналів з ЛЧМ2 6 сигнали надходять на перший і другий вхід пристрою кореляційної обробки 7, відповідно, де здійснюється формування й оцінка взаємної кореляційної функції сигналів. З пристрою кореляційної обробки 7 сигнал надходить через пристрій визначення глибини 8 на другий вхід пристрою відображення інформації 11. На перший вхід пристрою відображення інформації 11 надходить сигнал з першого виходу багатоканального корелятора для приймання сигналів з ЛЧМ1 3. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 Гідролокатор бокового огляду, який містить антену, комутатор приймання-передачі, передавальний тракт, перший формувач зондувального імпульсу з лінійною частотною модуляцією, приймальний тракт, перший багатоканальний корелятор для прийому сигналів з лінійною частотною модуляцією та пристрій відображення інформації, причому антена через комутатор прийому передачі підключена до виходу передавального тракту і входу приймального тракту, вхід передавального тракту з'єднаний з першим виходом першого формувача зондувального імпульсу з лінійною частотною модуляцією, вихід приймального тракту з'єднаний з першим входом першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, другий вхід першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний із другим виходом формувача з лінійною частотною модуляцією зондувального імпульсу, вихід першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний із пристроєм відображення інформації, який відрізняється тим, що додатково містить другий формувач лінійно-частотної модуляції зондувального імпульсу, другий багатоканальний корелятор для прийому сигналів з лінійною частотною модуляцією, пристрій кореляційної обробки й пристрій визначення глибини осторонь від судна, причому перший вихід другого формувача лінійночастотної модуляції зондувального імпульсу з'єднаний із другим входом передавального тракту, другий вихід формувача лінійно-частотної модуляції зондувального імпульсу з'єднаний з першим входом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід приймального тракту з'єднаний також із другим входом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід 3 UA 105592 C2 5 першого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією з'єднаний з першим входом пристрою кореляційної обробки, другий вхід пристрою кореляційної обробки з'єднаний з виходом другого багатоканального корелятора для прийому сигналів з лінійною частотною модуляцією, вихід пристрою кореляційної обробки з'єднаний із пристроєм визначення глибини осторонь від судна, вихід якого з'єднаний із другим входом пристрою відображення інформації. 4 UA 105592 C2 5 UA 105592 C2 6 UA 105592 C2 7 UA 105592 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюHonchar Anatolii Ivanovych, Safonov Oleksandr Valerijovych, Klochan Yurii Anatoliiovych, Klochan Valentyna Ivanivna, Shlychek Liubov Ivanivna, Fedoseenko Sergii Genadijovych
Автори російськоюГончар Анатолий Иванович, Сафонов Александр Валериевич, Клочан Юрий Анатолиевич, Клочан Валентина Ивановна, Шличек Любовь Ивановна, Федосеенко Сергей Генадиевич
МПК / Мітки
МПК: G01S 15/10, G01S 7/00, G01V 1/00
Мітки: бокового, огляду, гідролокатор
Код посилання
<a href="https://ua.patents.su/10-105592-gidrolokator-bokovogo-oglyadu.html" target="_blank" rel="follow" title="База патентів України">Гідролокатор бокового огляду</a>
Гідролокатор бокового огляду

Номер патенту: 90238
Опубліковано: 12.04.2010
Автори: Гончар Анатолій Іванович, Шличек Любов Іванівна, Клочан Юрій Анатолійович, Клочан Валентина Іванівна
МПК: G01S 15/00, G01V 1/38
Мітки: огляду, бокового, гідролокатор
Формула / Реферат:
Гідролокатор бокового огляду, який містить приймально-передавальну акустичну антену, комутатор прийому-передачі, передавальний тракт, формувач ЛЧМ-сигналів, пристрій обробки інформації, пристрій відображення інформації, пристрій керування, приймальний тракт оптимального прийому, що містить підсилювач високої частоти, змішувач, імпульсний гетеродин, n фільтрів, n детекторів, n селекторів і блок пам'яті, при цьому вихід передавального тракту...
Гідролокатор бокового огляду

Номер патенту: 71068
Опубліковано: 15.11.2004
Автори: Клочан Юрій Анатолійович, Клочан Валентина Іванівна
МПК: G01V 1/38, G01S 15/00
Мітки: огляду, гідролокатор, бокового
Формула / Реферат:
Гідролокатор бокового огляду, що містиь приймально-випромінюючу антену, передавальний тракт, формувач основного зондуючого імпульсу, приймальний тракт, формувач часового автоматичного регулювання підсилення ехосигналу, блок оперативної пам'яті обробки основного зондуючого імпульсу, пристрій керування, формувач синхроімпульсу, пристрій відображення інформації, причому вихід передавального тракту з'єднаний з виводом приймально-випромінюючої...
Фазовий гідролокатор бокового огляду
Номер патенту: 74686
Опубліковано: 16.01.2006
Автори: Клочан Юрій Анатолійович, Гончар Анатолій Іванович, Клочан Валентина Іванівна
МПК: G01V 1/38, G01S 15/00
Мітки: бокового, гідролокатор, огляду, фазовий
Формула / Реферат:
Фазовий гідролокатор бокового огляду, який містить формувач основного зондуючого імпульсу, передавальний тракт, випромінюючу антену, першу і другу приймальні антени, перший і другий приймальні тракти, перший і другий смугові фільтри, фазовий детектор, фільтр низьких частот, пристрій відображення інформації і пристрій керування, причому вихід передавального тракту з'єднаний з виходом випромінюючої антени, вихід першої приймальної антени...
Гідролокаційна система бокового огляду
Номер патенту: 71008
Опубліковано: 15.11.2004
Автори: Гончар Анатолій Іванович, Писанко Іван Миколайович, Клочан Юрій Анатолійович, Клочан Валентина Іванівна, Шличек Любов Іванівна
МПК: G01V 1/38, G01S 15/00
Мітки: гідролокаційна, бокового, огляду, система
Формула / Реферат:
Гідролокаційна система бокового огляду, що містить акустичну антену, комутатор прийому-передачі, передавальний тракт, приймальний тракт, аналого-цифровий перетворювач, перший блок оперативної пам'яті, пристрій вирівнювання масштабу запису за дальністю, пристрій відображення інформації і пристрій керування, в якому вихід передавального тракту через комутатор прийому-передачі з'єднаний із виводом акустичної антени, який через комутатор...
Передавальний тракт гідролокатора бокового огляду
Номер патенту: 88206
Опубліковано: 25.09.2009
Автори: Шличек Любов Іванівна, Гончар Анатолій Іванович, Клочан Юрій Анатолійович, Клочан Валентина Іванівна
МПК: G01S 13/00
Мітки: огляду, бокового, гідролокатора, тракт, передавальний
Формула / Реферат:
Передавальний тракт гідролокатора бокового огляду, що містить послідовно з'єднані задавальний генератор, модулятор, передкінцевий підсилювач, підсилювач потужності, індуктивність контуру виділення першої гармоніки і випромінюючу антену, при цьому вхід модулятора з'єднаний з виходом формувача керуючого імпульсу, вивід електроживлення кінцевого підсилювача потужності підключений до виходу джерела живлення кінцевого підсилювача, вхід джерела...
Попередній патент: Спосіб виробництва пасти сиркової для дитячого харчування
Наступний патент: Лікарський засіб з антиоксидантною дією, створений на основі листя malva sylvestris
Випадковий патент: Блок управління, зокрема, для транспортного засобу