Спосіб внесення матеріалу у сільськогосподарський лан
Формула / Реферат
1. Спосіб внесення матеріалу у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення матеріалу рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання матеріалу з одного або кількох висівних апаратів при продовженні висівання матеріалу рештою висівних апаратів, причому машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії:
стадію, на якій визначають периметр лану;
стадію, на якій визначають площі проходу біля краю лану, кожну з яких виконують на повну ширину машини, які необхідно виконати навколо лану, причому прохід по першій периметральній площі біля краю лану виконують прилеглим до периметра лану, а будь-які додаткові проходи по площах біля краю лану виконують зсередини периметральної площі проходу біля краю лану;
стадію, на якій визначають центральну площу всередині площ проходу біля краю лану для внесення матеріалу при проходах машини назад і вперед;
стадію, на якій вибирають відправне місце, щоб почати внесення матеріалу;
стадію, на якій визначають план шляху для внесення матеріалу, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі;
стадію, на якій виконують план шляху для внесення матеріалу на центральній площі і вимкнення будь-яких висівних апаратів, коли висівні апарати знаходяться на площах біля краю лану на кінцях центральної площі і під час будь-якого проходу часткової ширини вздовж боку центральної площі, коли частина висівних апаратів знаходиться на центральній площі, а частина висівних апаратів знаходиться на площах біля краю лану; і
стадію, на якій матеріал вносять на площі біля краю лану, використовуючи всю ширину машини.
2. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють, коли виконують прохід по першій периметральній площі біля краю лану, вносячи матеріал машиною.
3. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють, проходячи по периметру лану раніше у поточному сезоні вирощування.
4. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють упродовж попереднього сезону вирощування.
5. Спосіб за п. 1, який відрізняється тим, що матеріал вносять на периметральній площі біля краю лану при ручному керуванні машиною.
6. Спосіб за п. 5, який відрізняється тим, що при внесенні матеріалу на периметральній площі біля краю лану визначають новий периметр лану для майбутніх польових робіт.
7. Спосіб за п. 5, який відрізняється тим, що здійснюють вторгнення висівного апарата в зону сусіднього проходу по площі біля краю лану під час внесення матеріалу на периметральній площі біля краю лану через те, що фактичний периметр лану відхиляється від визначеного периметра лану.
8. Спосіб за п. 1, який відрізняється тим, що під час будь-якого відхилення від паралельних проходів назад і вперед на центральній площі один або кілька висівних апаратів переміщують на ділянку лану, що має оброблятися при наступному проході, причому один або кілька висівних апаратів перекривають при знаходженні на ділянці лану, що має оброблятися при майбутньому проході.
9. Спосіб за п. 1, який відрізняється тим, що під час будь-якого відхилення від паралельних проходів назад і вперед на центральній площі один або кілька висівних апаратів переміщують на ділянку лану попереднього проходу, дані про фактичний прохід реєструють і використовують у майбутніх польових роботах для перекриття висівних апаратів при попередньому проході, коли вони знаходяться в зоні вторгнення з наступного проходу, і при цьому у майбутніх польових роботах матеріал вносять у зоні вторгнення лише упродовж наступного проходу.
10. Спосіб за п. 9, який відрізняється тим, що оператор машини вибірково відміняє дані, які записують відповідно до п. 9, таким чином, що у майбутніх польових роботах висівні апарати не вимикають під час попереднього проходу, коли вони знаходяться в зоні вторгнення з наступного проходу.
11. Спосіб внесення насіння у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення насіння рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання насіння з одного або кількох висівних апаратів при продовженні висівання насіння рештою висівних апаратів, причому машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії:
стадію, на якій визначають периметр лану;
стадію, на якій визначають площі проходу біля краю лану, кожну з яких виконують на повну ширину машини, які необхідно виконати навколо лану, причому прохід по першій периметральній площі біля краю лану виконують прилеглим до периметра лану, а будь-які додаткові проходи по площах біля краю лану виконують зсередини периметральної площі проходу біля краю лану;
стадію, на якій визначають центральну площу всередині площ проходу біля краю лану для внесення насіння при проходах машини назад і вперед;
стадію, на якій вибирають відправне місце, щоб почати внесення насіння;
стадію, на якій визначають план шляху для внесення насіння, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі; і
стадію, на якій виконують план шляху для внесення насіння спершу на центральній площі, а потім на площах біля краю лану із забезпеченням оператору вибору подвійного або одинарного засівання будь-яких площ, які проходять двічі.
12. Спосіб за п. 11, який відрізняється тим, що машина має висівні апарати для насіння і висівні апарати для добрива, причому на площах, які проходять двічі, добрива наносять лише одного разу.
13. Спосіб внесення матеріалу у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення матеріалу рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання матеріалу з одного або кількох висівних апаратів при продовженні висівання матеріалу рештою висівних апаратів, причому машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії:
стадію, на якій матеріал вносять на зовнішній площі біля краю лану на кінцях лану, яка має ширину, що дорівнює ширині машини;
стадію, на якій визначають центральну площу шириною, яка дорівнює одній або кільком величинам повної ширини знаряддя, всередині зовнішньої площі біля краю лану, таким чином утворюючи внутрішню площу біля краю лану шириною, яка дорівнює одній або кільком величинам повної ширини значенню знаряддя;
стадію, на якій визначають план шляху для внесення матеріалу, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі;
стадію, на якій виконують план шляху для внесення матеріалу на центральній площі послідовністю проходів назад і вперед і повертаючи машину на площах біля краю лану на кінцях центральної площі, причому система керування вимикає будь-які висівні апарати, коли ці висівні апарати знаходяться на площах біля краю лану на кінцях центральної площі; і
стадію, на якій матеріал вносять на внутрішній площі біля краю лану.
Текст
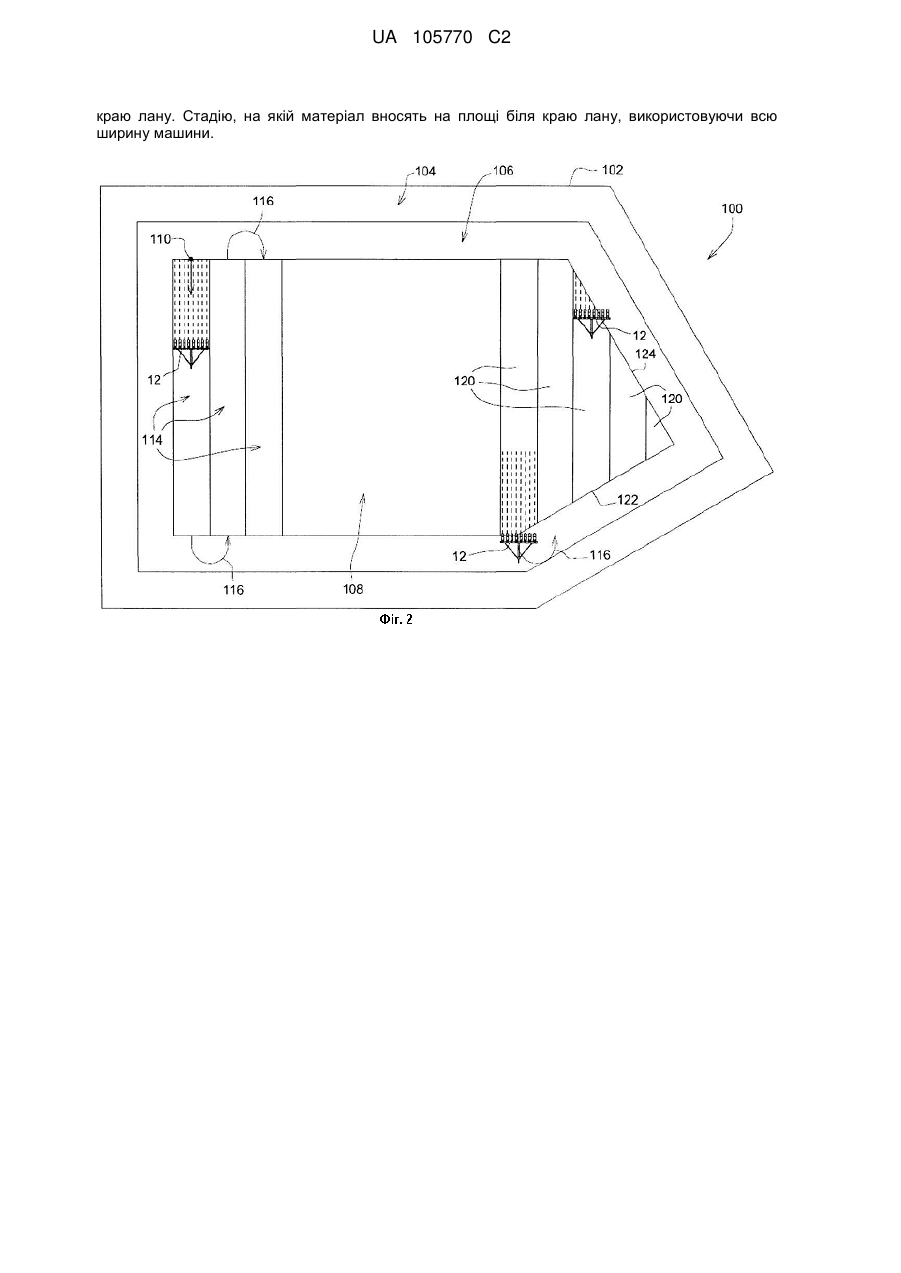
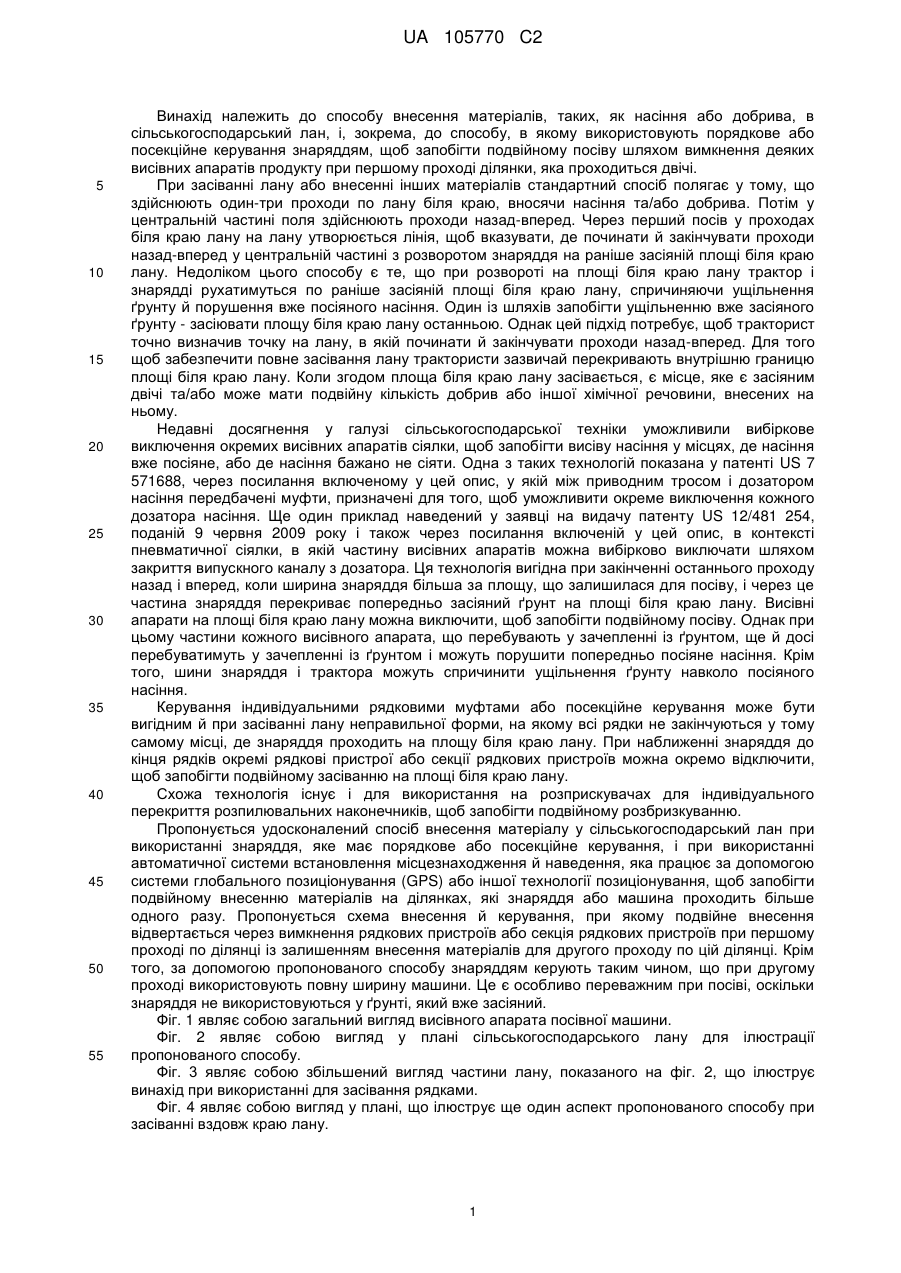
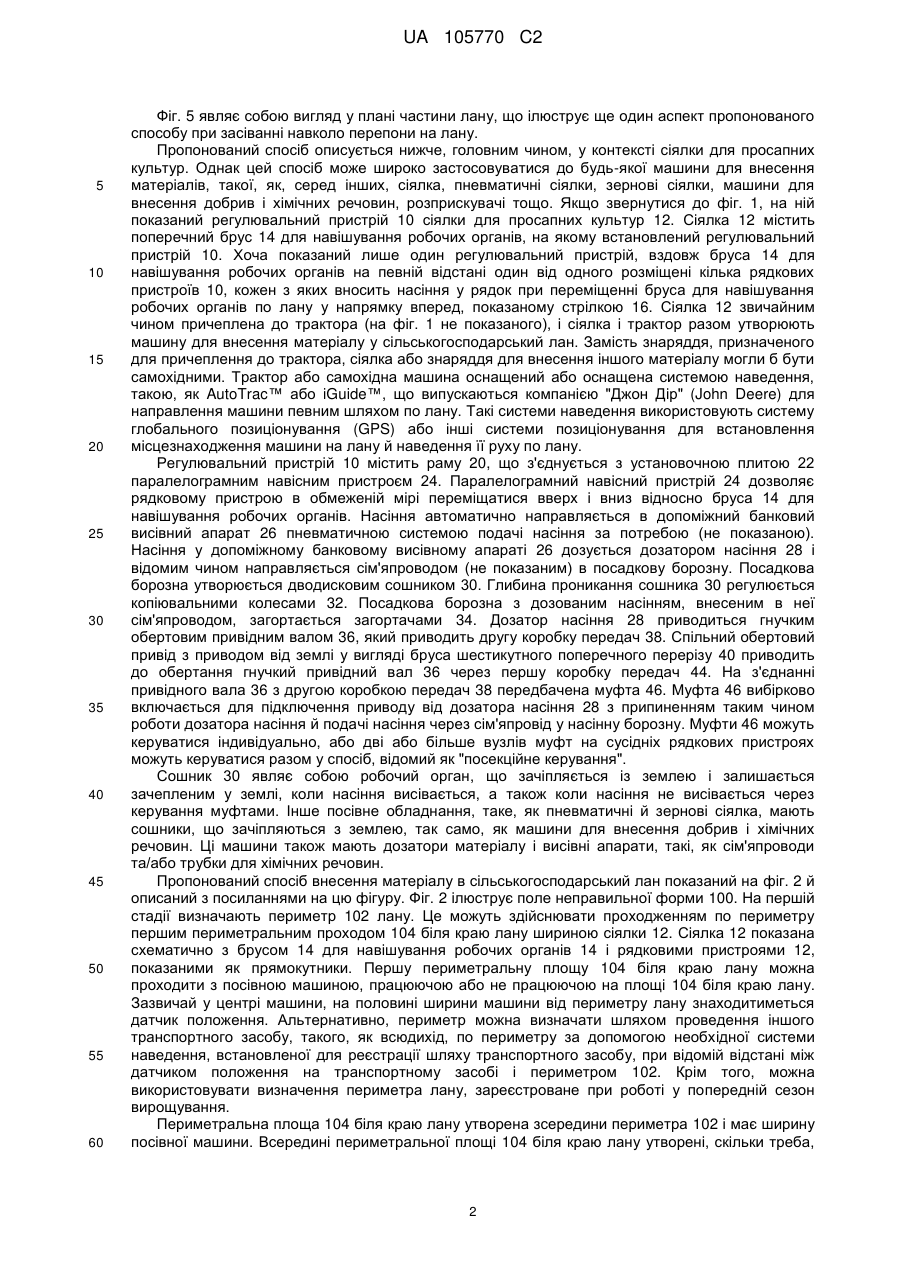
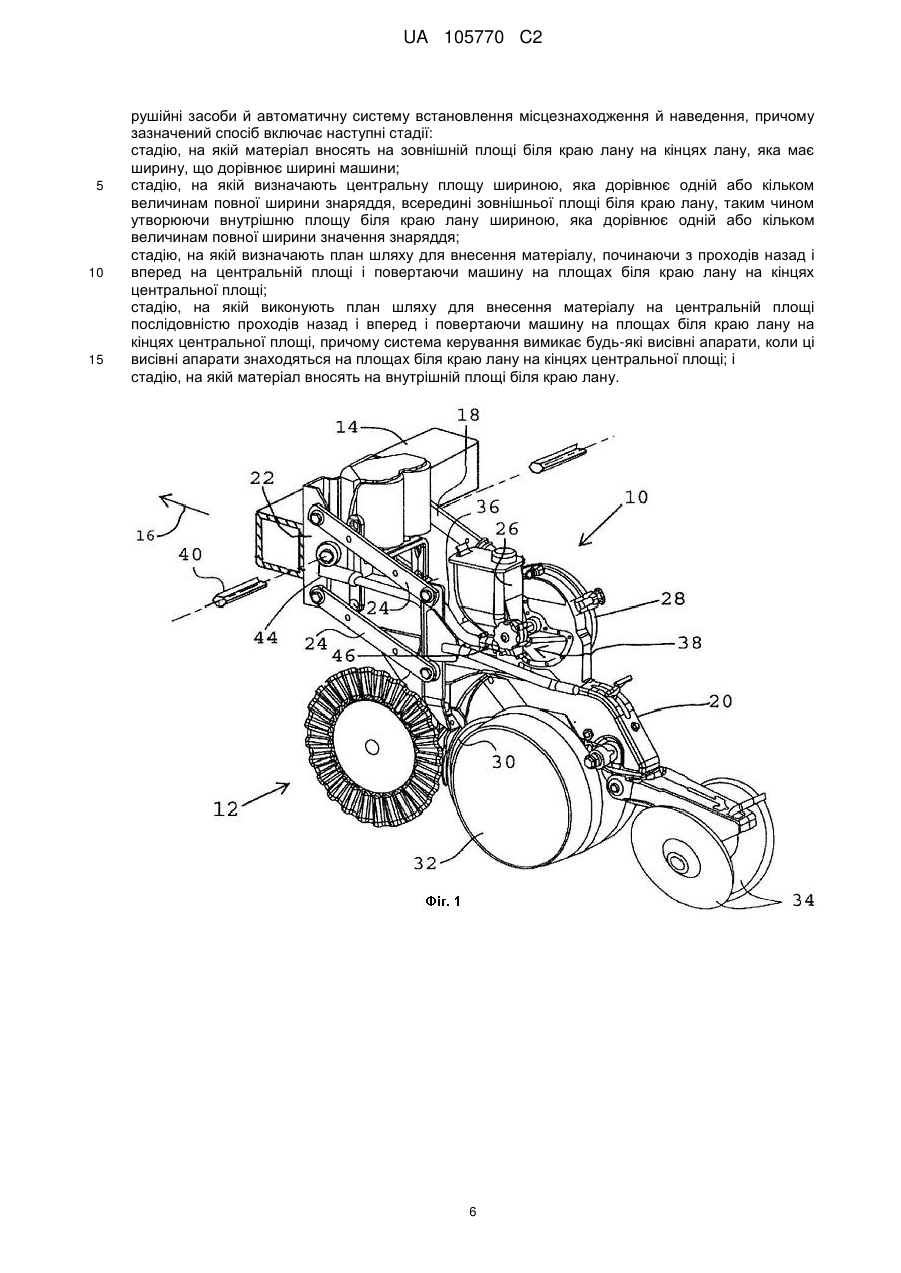
Реферат: Заявлений спосіб внесення матеріалу у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення матеріалу рядками при русі машини по лану. Машина має систему керування, призначену для вибіркової зупинки висівання матеріалу з одного або кількох висівних апаратів при продовженні висівання матеріалу рештою висівних апаратів. Машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення. Спосіб включає кілька стадій. Стадію, на якій визначають периметр лану. Стадію, на якій визначають площі проходу біля краю лану, кожну з яких виконують на повну ширину машини, які необхідно виконати навколо лану, причому прохід по першій периметральній площі біля краю лану виконують прилеглим до периметра лану, а будь-які додаткові проходи по площах біля краю лану виконують зсередини периметральної площі проходу біля краю лану. Стадію, на якій визначають центральну площу всередині площ проходу біля краю лану для внесення матеріалу при проходах машини назад і вперед. Стадію, на якій вибирають відправне місце, щоб почати внесення матеріалу. Стадію, на якій визначають план шляху для внесення матеріалу, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі. Стадію, на якій виконують план шляху для внесення матеріалу на центральній площі і вимкнення будь-яких висівних апаратів, коли висівні апарати знаходяться на площах біля краю лану на кінцях центральної площі і під час будь-якого проходу часткової ширини вздовж боку центральної площі, коли частина висівних апаратів знаходиться на центральній площі, а частина висівних апаратів знаходиться на площах біля UA 105770 C2 (12) UA 105770 C2 краю лану. Стадію, на якій матеріал вносять на площі біля краю лану, використовуючи всю ширину машини. UA 105770 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до способу внесення матеріалів, таких, як насіння або добрива, в сільськогосподарський лан, і, зокрема, до способу, в якому використовують порядкове або посекційне керування знаряддям, щоб запобігти подвійному посіву шляхом вимкнення деяких висівних апаратів продукту при першому проході ділянки, яка проходиться двічі. При засіванні лану або внесенні інших матеріалів стандартний спосіб полягає у тому, що здійснюють один-три проходи по лану біля краю, вносячи насіння та/або добрива. Потім у центральній частині поля здійснюють проходи назад-вперед. Через перший посів у проходах біля краю лану на лану утворюється лінія, щоб вказувати, де починати й закінчувати проходи назад-вперед у центральній частині з розворотом знаряддя на раніше засіяній площі біля краю лану. Недоліком цього способу є те, що при розвороті на площі біля краю лану трактор і знарядді рухатимуться по раніше засіяній площі біля краю лану, спричиняючи ущільнення ґрунту й порушення вже посіяного насіння. Один із шляхів запобігти ущільненню вже засіяного ґрунту - засіювати площу біля краю лану останньою. Однак цей підхід потребує, щоб тракторист точно визначив точку на лану, в якій починати й закінчувати проходи назад-вперед. Для того щоб забезпечити повне засівання лану трактористи зазвичай перекривають внутрішню границю площі біля краю лану. Коли згодом площа біля краю лану засівається, є місце, яке є засіяним двічі та/або може мати подвійну кількість добрив або іншої хімічної речовини, внесених на ньому. Недавні досягнення у галузі сільськогосподарської техніки уможливили вибіркове виключення окремих висівних апаратів сіялки, щоб запобігти висіву насіння у місцях, де насіння вже посіяне, або де насіння бажано не сіяти. Одна з таких технологій показана у патенті US 7 571688, через посилання включеному у цей опис, у якій між приводним тросом і дозатором насіння передбачені муфти, призначені для того, щоб уможливити окреме виключення кожного дозатора насіння. Ще один приклад наведений у заявці на видачу патенту US 12/481 254, поданій 9 червня 2009 року і також через посилання включеній у цей опис, в контексті пневматичної сіялки, в якій частину висівних апаратів можна вибірково виключати шляхом закриття випускного каналу з дозатора. Ця технологія вигідна при закінченні останнього проходу назад і вперед, коли ширина знаряддя більша за площу, що залишилася для посіву, і через це частина знаряддя перекриває попередньо засіяний ґрунт на площі біля краю лану. Висівні апарати на площі біля краю лану можна виключити, щоб запобігти подвійному посіву. Однак при цьому частини кожного висівного апарата, що перебувають у зачепленні із ґрунтом, ще й досі перебуватимуть у зачепленні із ґрунтом і можуть порушити попередньо посіяне насіння. Крім того, шини знаряддя і трактора можуть спричинити ущільнення ґрунту навколо посіяного насіння. Керування індивідуальними рядковими муфтами або посекційне керування може бути вигідним й при засіванні лану неправильної форми, на якому всі рядки не закінчуються у тому самому місці, де знаряддя проходить на площу біля краю лану. При наближенні знаряддя до кінця рядків окремі рядкові пристрої або секції рядкових пристроїв можна окремо відключити, щоб запобігти подвійному засіванню на площі біля краю лану. Схожа технологія існує і для використання на розприскувачах для індивідуального перекриття розпилювальних наконечників, щоб запобігти подвійному розбризкуванню. Пропонується удосконалений спосіб внесення матеріалу у сільськогосподарський лан при використанні знаряддя, яке має порядкове або посекційне керування, і при використанні автоматичної системи встановлення місцезнаходження й наведення, яка працює за допомогою системи глобального позиціонування (GPS) або іншої технології позиціонування, щоб запобігти подвійному внесенню матеріалів на ділянках, які знаряддя або машина проходить більше одного разу. Пропонується схема внесення й керування, при якому подвійне внесення відвертається через вимкнення рядкових пристроїв або секція рядкових пристроїв при першому проході по ділянці із залишенням внесення матеріалів для другого проходу по цій ділянці. Крім того, за допомогою пропонованого способу знаряддям керують таким чином, що при другому проході використовують повну ширину машини. Це є особливо переважним при посіві, оскільки знаряддя не використовуються у ґрунті, який вже засіяний. Фіг. 1 являє собою загальний вигляд висівного апарата посівної машини. Фіг. 2 являє собою вигляд у плані сільськогосподарського лану для ілюстрації пропонованого способу. Фіг. 3 являє собою збільшений вигляд частини лану, показаного на фіг. 2, що ілюструє винахід при використанні для засівання рядками. Фіг. 4 являє собою вигляд у плані, що ілюструє ще один аспект пропонованого способу при засіванні вздовж краю лану. 1 UA 105770 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 5 являє собою вигляд у плані частини лану, що ілюструє ще один аспект пропонованого способу при засіванні навколо перепони на лану. Пропонований спосіб описується нижче, головним чином, у контексті сіялки для просапних культур. Однак цей спосіб може широко застосовуватися до будь-якої машини для внесення матеріалів, такої, як, серед інших, сіялка, пневматичні сіялки, зернові сіялки, машини для внесення добрив і хімічних речовин, розприскувачі тощо. Якщо звернутися до фіг. 1, на ній показаний регулювальний пристрій 10 сіялки для просапних культур 12. Сіялка 12 містить поперечний брус 14 для навішування робочих органів, на якому встановлений регулювальний пристрій 10. Хоча показаний лише один регулювальний пристрій, вздовж бруса 14 для навішування робочих органів на певній відстані один від одного розміщені кілька рядкових пристроїв 10, кожен з яких вносить насіння у рядок при переміщенні бруса для навішування робочих органів по лану у напрямку вперед, показаному стрілкою 16. Сіялка 12 звичайним чином причеплена до трактора (на фіг. 1 не показаного), і сіялка і трактор разом утворюють машину для внесення матеріалу у сільськогосподарський лан. Замість знаряддя, призначеного для причеплення до трактора, сіялка або знаряддя для внесення іншого матеріалу могли б бути самохідними. Трактор або самохідна машина оснащений або оснащена системою наведення, такою, як AutoTrac™ або iGuide™, що випускаються компанією "Джон Дір" (John Deere) для направлення машини певним шляхом по лану. Такі системи наведення використовують систему глобального позиціонування (GPS) або інші системи позиціонування для встановлення місцезнаходження машини на лану й наведення її руху по лану. Регулювальний пристрій 10 містить раму 20, що з'єднується з установочною плитою 22 паралелограмним навісним пристроєм 24. Паралелограмний навісний пристрій 24 дозволяє рядковому пристрою в обмеженій мірі переміщатися вверх і вниз відносно бруса 14 для навішування робочих органів. Насіння автоматично направляється в допоміжний банковий висівний апарат 26 пневматичною системою подачі насіння за потребою (не показаною). Насіння у допоміжному банковому висівному апараті 26 дозується дозатором насіння 28 і відомим чином направляється сім'япроводом (не показаним) в посадкову борозну. Посадкова борозна утворюється дводисковим сошником 30. Глибина проникання сошника 30 регулюється копіювальними колесами 32. Посадкова борозна з дозованим насінням, внесеним в неї сім'япроводом, загортається загортачами 34. Дозатор насіння 28 приводиться гнучким обертовим привідним валом 36, який приводить другу коробку передач 38. Спільний обертовий привід з приводом від землі у вигляді бруса шестикутного поперечного перерізу 40 приводить до обертання гнучкий привідний вал 36 через першу коробку передач 44. На з'єднанні привідного вала 36 з другою коробкою передач 38 передбачена муфта 46. Муфта 46 вибірково включається для підключення приводу від дозатора насіння 28 з припиненням таким чином роботи дозатора насіння й подачі насіння через сім'япровід у насінну борозну. Муфти 46 можуть керуватися індивідуально, або дві або більше вузлів муфт на сусідніх рядкових пристроях можуть керуватися разом у спосіб, відомий як "посекційне керування". Сошник 30 являє собою робочий орган, що зачіпляється із землею і залишається зачепленим у землі, коли насіння висівається, а також коли насіння не висівається через керування муфтами. Інше посівне обладнання, таке, як пневматичні й зернові сіялка, мають сошники, що зачіпляються з землею, так само, як машини для внесення добрив і хімічних речовин. Ці машини також мають дозатори матеріалу і висівні апарати, такі, як сім'япроводи та/або трубки для хімічних речовин. Пропонований спосіб внесення матеріалу в сільськогосподарський лан показаний на фіг. 2 й описаний з посиланнями на цю фігуру. Фіг. 2 ілюструє поле неправильної форми 100. На першій стадії визначають периметр 102 лану. Це можуть здійснювати проходженням по периметру першим периметральним проходом 104 біля краю лану шириною сіялки 12. Сіялка 12 показана схематично з брусом 14 для навішування робочих органів 14 і рядковими пристроями 12, показаними як прямокутники. Першу периметральну площу 104 біля краю лану можна проходити з посівною машиною, працюючою або не працюючою на площі 104 біля краю лану. Зазвичай у центрі машини, на половині ширини машини від периметру лану знаходитиметься датчик положення. Альтернативно, периметр можна визначати шляхом проведення іншого транспортного засобу, такого, як всюдихід, по периметру за допомогою необхідної системи наведення, встановленої для реєстрації шляху транспортного засобу, при відомій відстані між датчиком положення на транспортному засобі і периметром 102. Крім того, можна використовувати визначення периметра лану, зареєстроване при роботі у попередній сезон вирощування. Периметральна площа 104 біля краю лану утворена зсередини периметра 102 і має ширину посівної машини. Всередині периметральної площі 104 біля краю лану утворені, скільки треба, 2 UA 105770 C2 5 10 15 20 25 30 35 40 45 50 55 60 одна або кілька додаткових площ 106 біля краю лану. Кожна додаткова площа біля краю лану має ширину, що дорівнює ширині машини 12. Площа біля краю лану у верхній і нижній частинах лану, як показано на фіг. 2, використовується для розвороту машини, про що йтиметься далі. Крім того, для розвороту машини використовуватиметься площа біля краю лану на правому боці лану. Однак площа біля краю лану на лівому боці лану для розвороту не використовується і, таким чином, може бути вужчою за інші площі, але ще й досі кратною ширині машини. Після визначення загальної площі біля краю лану визначають центральну площу 108, що залишилася, лану 100. Починаючи з вибраного відправного місця, такого, як точка 110, визначають план шляху для засівання лану, починаючи з центральної площі 108. План шляху по центральній площі складається з низки проходів назад і вперед 114 з поворотами 116, виконуваними в кінцях проходів назад і вперед. Повороти відбуваються у площах біля краю лану 104 й 106. Планування шляху може бути розумовою стадією оператора машини або може виконуватися комп'ютерною програмою, яка є частиною системи наведення машини. Коли машина досягає межі між центральною площею 108 і площею біля краю лану, рядкові пристрої виключають, щоб зупинити висівання насіння. Для цих проходів назад і вперед 114, які є перпендикулярними межі центральної площі, коли машина доходить до кінця проходу, брус 14 для навішування робочих органів піднімають, піднімаючи при цьому робочі органи, що зачіпляються із землею, від землі. При цьому від землі піднімають також привідне колесо для вала 40, зупиняючи висівання насіння з усіх рядкових пристроїв одночасно. Проходи назад і вперед 120 на правому боці лану мають межі 122 й124 з площею біля краю лану, які є похилими відносно напрямку руху машини при проходах назад і вперед. Коли машина перетинає ці межі, рядкові пристрої включаються і виключаються по одному за раз або по одній секції за раз, коли рядкові пристрої перетинають межу. Це показано переривчастими лініями, що тягнуться за кожним рядковим пристроєм, які представляють рядки насіння. На фіг. 3 це показано у збільшеному вигляді 3. Сіялка для просапних культур 130 показана при проході 120, що перетинає межу 124 між центральною площею і площею 106. Індивідуальні рядкові пристрої 10 перекриваються, коли вони перетинають межу. Рядки насіння показані переривчастими лініями 132. Посекційне керування показане для проходу назад і вперед 134. Висівними апаратами кількох рядкових пристроїв керують одночасно, в результаті чого разом починають або закінчують два або більше рядків. Коли машина перетинає межу 124, секції виключають або включають, утворюючи ступінчасту картину, через те, що одночасно відключаються кілька рядків. На фіг. 4 показане ще одне внесення, при якому остаточний прохід назад і вперед 136 є вужчим за ширину сіялки 138. При засіванні при останньому проході 136, працюють лише ті рядкові пристрої, що знаходяться в площі проходу 136. Рядкові пристрої в площі 106 біля краю лану перекриті. На остаточній стадії засівають площу біля краю лану. Площу 106 біля краю лану засівають на повну ширину машини. Площу 104 біля краю лану також засівають на повну ширину. Площу 104 біля краю лану можуть засівати останньою або можуть вже засіяти на першій стадії, коли визначають периметр лану. Периметральну площу 104 біля краю лану можуть засівати в ручному режимі роботи машини. Це матиме місце у випадку, якщо засівання периметральної площі біля краю лану здійснюватимуть при визначенні периметра лану. Крім того, якщо периметр лану визначений по роботі машині у попередньому сезоні вирощування, цього сезону може бути деяке відхилення фактичного периметра лану, скажімо, через ерозію тощо, від визначення у попередньому сезоні. Унаслідок цього периметральну площу 104 біля краю лану переважно засіватимуть в ручному, а не в автоматичному режимі, щоб мати змогу зробити поправки на зміни периметра. Засівання периметральної площі 104 біля краю лану у ручному режимі, першою чи останньою, може спричинити певне перекриття з внутрішньою площею 106 біля краю лану або з центральною площею 108, якщо площа біля краю лану лише одна. Проходи назад і вперед показані на фіг. 2-4 прямими. Залежно від контурів лану, проходи можуть слідувати криволінійним шляхом. У будь-якому випадку проходи назад і вперед будуть, як правило, паралельними. У випадку перепони на лану пропонований спосіб можна здійснювати, як описано з посиланнями на фіг. 5. У даному випадку перепона 200 знаходиться у центральній площі лану. Перепоною може бути мокра ділянка, яку не можна засіяти, великий шматок породи, опора повітряної лінії електропередачі тощо. Оточуючими перепону показані чотири проходи назад і вперед 202, 204, 206 і 208. Прохід 202 виконують першим, і при цьому машиною здійснюють посів рядками, показаними лініями 210. Після повороту при виконанні наступного проходу 204 і посіві рядків, показаних переривчастими лініями 212, оператор або система керування 3 UA 105770 C2 5 10 15 20 25 30 машиною направляє машину навколо перепони шляхом повороту у зону попереднього проходу 202 з утворенням вторгнення у прохід 202. Система керування, знаючи, що зона проходу 202 вже засіяна, вимкне рядкові пристрої, як тільки вони перейдуть межу 214 між двома зонами проходів 202 і 204. Це запобігає подвійному засіванню, але не відвертає порушення насіння. Це вторгнення на попередній прохід реєструють для подальших операцій. При посіві у наступному сезоні система керування знатиме, де матиме місце вторгнення з подальшого проходу 204 до проходу 202 і може вимкнути рядкові пристрої під час проходу 202 у зоні вторгнення. Потім при виконанні проходу 204 рядкові пристрої можуть залишатися увімкненими і засівати зону вторгнення другого разу перебування у цій зоні. Як варіант, оператор може відмінити запис вторгнення, якщо ймовірно, що при наступних операціях ця перепона вряд чи буде присутньою. Це може бути випадок, коли перепоною є мокра ділянка через незвичайно великі осади впродовж поточного посівного сезону. Альтернативно, при посівній операції першого року, коли відбувається вторгнення, висівні апарати можуть залишатися увімкненими для подвійного засівання і забезпечення, що насіння буде внесене в ґрунт на потрібну глибину для належної схожості. Насіння, посіяне при першому проході, порушиться і може вже бути не на потрібній глибині. Однак будь-який туковисівний апарат може вимикатися при вторгненні, щоб відвернути подвійне внесення добрив на цій ділянці, оскільки це може бути шкідливим для загального здоров'я рослин. При подальшому проході 206, коли оператор направляє машину в об'їзд перепони, машина здійснює вторгнення у наступний прохід 208, який ще має бути виконаним. Оскільки система керування знає, де знаходиться прохід, коли рядкові пристрої перетинають межу 216 з подальшим проходом 208, рядкові пристрої вимикають. Після повороту при виконанні проходу 208 рядкові пристрої залишають увімкненими, і прохід 208 засівають на всю ширину знаряддя, засіваючи зону вторгнення при другому проході через цю зону. У формулі винаходу термін "машина" використовується у широкому сенсі й означає самохідну машину для внесення матеріалів або сполучення трактора і знаряддя. Якщо при внесенні матеріалу ділянка лану покривається двічі, за допомогою пропонованого способу керують висівні апарати продукту таким чином, щоб висівати продукт лише під час другого проходу ділянки. Вище описаний переважний варіант здійснення, але зрозуміло, що можливі інші варіанти у межах обсягу цього винаходу, визначеного доданою формулою винаходу. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Спосіб внесення матеріалу у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення матеріалу рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання матеріалу з одного або кількох висівних апаратів при продовженні висівання матеріалу рештою висівних апаратів, причому машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії: стадію, на якій визначають периметр лану; стадію, на якій визначають площі проходу біля краю лану, кожну з яких виконують на повну ширину машини, які необхідно виконати навколо лану, причому прохід по першій периметральній площі біля краю лану виконують прилеглим до периметра лану, а будь-які додаткові проходи по площах біля краю лану виконують зсередини периметральної площі проходу біля краю лану; стадію, на якій визначають центральну площу всередині площ проходу біля краю лану для внесення матеріалу при проходах машини назад і вперед; стадію, на якій вибирають відправне місце, щоб почати внесення матеріалу; стадію, на якій визначають план шляху для внесення матеріалу, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі; стадію, на якій виконують план шляху для внесення матеріалу на центральній площі і вимкнення будь-яких висівних апаратів, коли висівні апарати знаходяться на площах біля краю лану на кінцях центральної площі і під час будь-якого проходу часткової ширини вздовж боку центральної площі, коли частина висівних апаратів знаходиться на центральній площі, а частина висівних апаратів знаходиться на площах біля краю лану; і стадію, на якій матеріал вносять на площі біля краю лану, використовуючи всю ширину машини. 4 UA 105770 C2 5 10 15 20 25 30 35 40 45 50 55 60 2. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють, коли виконують прохід по першій периметральній площі біля краю лану, вносячи матеріал машиною. 3. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють, проходячи по периметру лану раніше у поточному сезоні вирощування. 4. Спосіб за п. 1, який відрізняється тим, що стадію, на якій визначають периметр лану, здійснюють упродовж попереднього сезону вирощування. 5. Спосіб за п. 1, який відрізняється тим, що матеріал вносять на периметральній площі біля краю лану при ручному керуванні машиною. 6. Спосіб за п. 5, який відрізняється тим, що при внесенні матеріалу на периметральній площі біля краю лану визначають новий периметр лану для майбутніх польових робіт. 7. Спосіб за п. 5, який відрізняється тим, що здійснюють вторгнення висівного апарата в зону сусіднього проходу по площі біля краю лану під час внесення матеріалу на периметральній площі біля краю лану через те, що фактичний периметр лану відхиляється від визначеного периметра лану. 8. Спосіб за п. 1, який відрізняється тим, що під час будь-якого відхилення від паралельних проходів назад і вперед на центральній площі один або кілька висівних апаратів переміщують на ділянку лану, що має оброблятися при наступному проході, причому один або кілька висівних апаратів перекривають при знаходженні на ділянці лану, що має оброблятися при майбутньому проході. 9. Спосіб за п. 1, який відрізняється тим, що під час будь-якого відхилення від паралельних проходів назад і вперед на центральній площі один або кілька висівних апаратів переміщують на ділянку лану попереднього проходу, дані про фактичний прохід реєструють і використовують у майбутніх польових роботах для перекриття висівних апаратів при попередньому проході, коли вони знаходяться в зоні вторгнення з наступного проходу, і при цьому у майбутніх польових роботах матеріал вносять у зоні вторгнення лише упродовж наступного проходу. 10. Спосіб за п. 9, який відрізняється тим, що оператор машини вибірково відміняє дані, які записують відповідно до п. 9, таким чином, що у майбутніх польових роботах висівні апарати не вимикають під час попереднього проходу, коли вони знаходяться в зоні вторгнення з наступного проходу. 11. Спосіб внесення насіння у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення насіння рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання насіння з одного або кількох висівних апаратів при продовженні висівання насіння рештою висівних апаратів, причому машина має також рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії: стадію, на якій визначають периметр лану; стадію, на якій визначають площі проходу біля краю лану, кожну з яких виконують на повну ширину машини, які необхідно виконати навколо лану, причому прохід по першій периметральній площі біля краю лану виконують прилеглим до периметра лану, а будь-які додаткові проходи по площах біля краю лану виконують зсередини периметральної площі проходу біля краю лану; стадію, на якій визначають центральну площу всередині площ проходу біля краю лану для внесення насіння при проходах машини назад і вперед; стадію, на якій вибирають відправне місце, щоб почати внесення насіння; стадію, на якій визначають план шляху для внесення насіння, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі; і стадію, на якій виконують план шляху для внесення насіння спершу на центральній площі, а потім на площах біля краю лану із забезпеченням оператору вибору подвійного або одинарного засівання будь-яких площ, які проходять двічі. 12. Спосіб за п. 11, який відрізняється тим, що машина має висівні апарати для насіння і висівні апарати для добрива, причому на площах, які проходять двічі, добрива наносять лише один раз. 13. Спосіб внесення матеріалу у сільськогосподарський лан за допомогою машини з кількома висівними апаратами матеріалу, розміщеними по ширині машини для внесення матеріалу рядками при русі машини по лану, причому машина має також систему керування, призначену для вибіркової зупинки висівання матеріалу з одного або кількох висівних апаратів при продовженні висівання матеріалу рештою висівних апаратів, причому машина має також 5 UA 105770 C2 5 10 15 рушійні засоби й автоматичну систему встановлення місцезнаходження й наведення, причому зазначений спосіб включає наступні стадії: стадію, на якій матеріал вносять на зовнішній площі біля краю лану на кінцях лану, яка має ширину, що дорівнює ширині машини; стадію, на якій визначають центральну площу шириною, яка дорівнює одній або кільком величинам повної ширини знаряддя, всередині зовнішньої площі біля краю лану, таким чином утворюючи внутрішню площу біля краю лану шириною, яка дорівнює одній або кільком величинам повної ширини значення знаряддя; стадію, на якій визначають план шляху для внесення матеріалу, починаючи з проходів назад і вперед на центральній площі і повертаючи машину на площах біля краю лану на кінцях центральної площі; стадію, на якій виконують план шляху для внесення матеріалу на центральній площі послідовністю проходів назад і вперед і повертаючи машину на площах біля краю лану на кінцях центральної площі, причому система керування вимикає будь-які висівні апарати, коли ці висівні апарати знаходяться на площах біля краю лану на кінцях центральної площі; і стадію, на якій матеріал вносять на внутрішній площі біля краю лану. 6 UA 105770 C2 7 UA 105770 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори російськоюChinkiwsky Patrick
МПК / Мітки
МПК: A01C 7/00, A01C 15/00
Мітки: сільськогосподарський, спосіб, матеріалу, лан, внесення
Код посилання
<a href="https://ua.patents.su/10-105770-sposib-vnesennya-materialu-u-silskogospodarskijj-lan.html" target="_blank" rel="follow" title="База патентів України">Спосіб внесення матеріалу у сільськогосподарський лан</a>
Пристрій для внесення матеріалу під сільськогосподарські культури (варіанти) та спосіб внесення матеріалу під сільськогосподарські культури
Номер патенту: 96472
Опубліковано: 10.11.2011
Автори: Гомес Майкл Джон, Ді Федеріко Іван
МПК: A01B 79/00, A01B 69/00
Мітки: пристрій, варіанти, внесення, сільськогосподарські, культури, спосіб, матеріалу
Формула / Реферат:
1. Пристрій для внесення матеріалу під сільськогосподарські культури, що містить транспортний засіб доставки для переміщення по полю, датчик для отримання даних про сільськогосподарські культури в процесі переміщення транспортного засобу доставки по полю; контролер транспортного засобу доставки, виконаний зі здатністю автоматичного управління переміщенням транспортного засобу доставки, і сільськогосподарський контролер, виконаний зі...
Пристрій для внесення композитного матеріалу у мікропорожнини та фісури
Номер патенту: 87792
Опубліковано: 25.02.2014
Автор: Сейфоллахі Гаредагі Зад Моджтаба
МПК: A61C 3/00
Мітки: пристрій, фісури, внесення, матеріалу, мікропорожнини, композитного
Формула / Реферат:
1. Пристрій для внесення композитного матеріалу у мікропорожнини та фісури, що складається з ручки з кріпленнями для насадок різної товщини і довжини з двох сторін, а також насадок різного розміру.2. Пристрій для внесення композитного матеріалу у мікропорожнини та фісури за п. 1, який відрізняється тим, що з двох боків симетрично розташовані кріплення для насадок.3. Пристрій для внесення композитного матеріалу у мікропорожнини...
Спосіб припосівного внесення добрив
Номер патенту: 65147
Опубліковано: 25.11.2011
Автори: Бакум Микола Васильович, Бакум Марія Миколаївна, Михайлова Катерина Анатоліївна, Михайлов Анатолій Дмитрович
МПК: A01C 5/00
Мітки: припосівного, внесення, добрив, спосіб
Формула / Реферат:
Спосіб припосівного внесення добрив, що включає формування борозенок для насіння і добрив, висів насіння і добрив з ґрунтовим прошарком та вирівнювання поверхні засіяного поля, який відрізняється тим, що борозенку для добрив виконують криволінійної форми в поперечному перегині рядка і розміщують еквідистантно зоні формування кореневої системи сільськогосподарських рослин, насіння яких висівають.
Застосування машини для поверхневого внесення гранульованих мінеральних добрив як машини для посіву рису у чеках
Номер патенту: 41462
Опубліковано: 25.05.2009
Автори: Тарасов Олексій Миколайович, Мележик Віктор Андрійович, Воронюк Зоя Степанівна, Дудченко Володимир Вікторович, Корнбергер Володимир Глібович, Митрофанов Олександр Петрович, Уманський Олексій Миколайович, Бондарев Євген Ілліч
МПК: A01C 7/00
Мітки: мінеральних, посіву, чеках, внесення, поверхневого, добрив, гранульованих, машини, застосування, рису
Формула / Реферат:
Застосування машини для поверхневого внесення гранульованих мінеральних добрив як машини для посіву рису у чеках.
Спосіб виготовлення насіннєносця і спосіб внесення насіння рослин у gрунт
Номер патенту: 64814
Опубліковано: 15.03.2004
Автор: Погрібняк Володимир Петрович
Мітки: спосіб, насіннєносця, рослин, грунт, виготовлення, внесення, насіння
Формула / Реферат:
1. Спосіб виготовлення насіннєносця, що включає виготовлення капсули із органічних матеріалів із зв’язуючим, заповнення її добривами, мікроелементами та стимуляторами росту, розміщення у капсулі підготовленого до сівби відомими способами насіння, обробку його отрутохімікатами, який відрізняється тим, що капсулу виготовляють методом пресування із водонестійкого матеріалу, переважно органічного або органо-мінерального добрива з біоактивними...
Попередній патент: Спосіб борування сталевих виробів та склад для його здійснення
Наступний патент: Похідні циклогексиламіду та їх застосування як антагоністів рецептора crf-1
Випадковий патент: Композиційний матеріал