Безпілотний багатомоторний вертоліт для перевезення невеликих вантажів
Номер патенту: 119261
Опубліковано: 25.09.2017
Автори: Двигон Василь Олександрович, Литвин Юрій Олександрович, Матійчик Денис Михайлович, Фузік Михайло Ігорович, Матійчик Михайло Петрович, Рибальченко Олександр Сергійович
Формула / Реферат
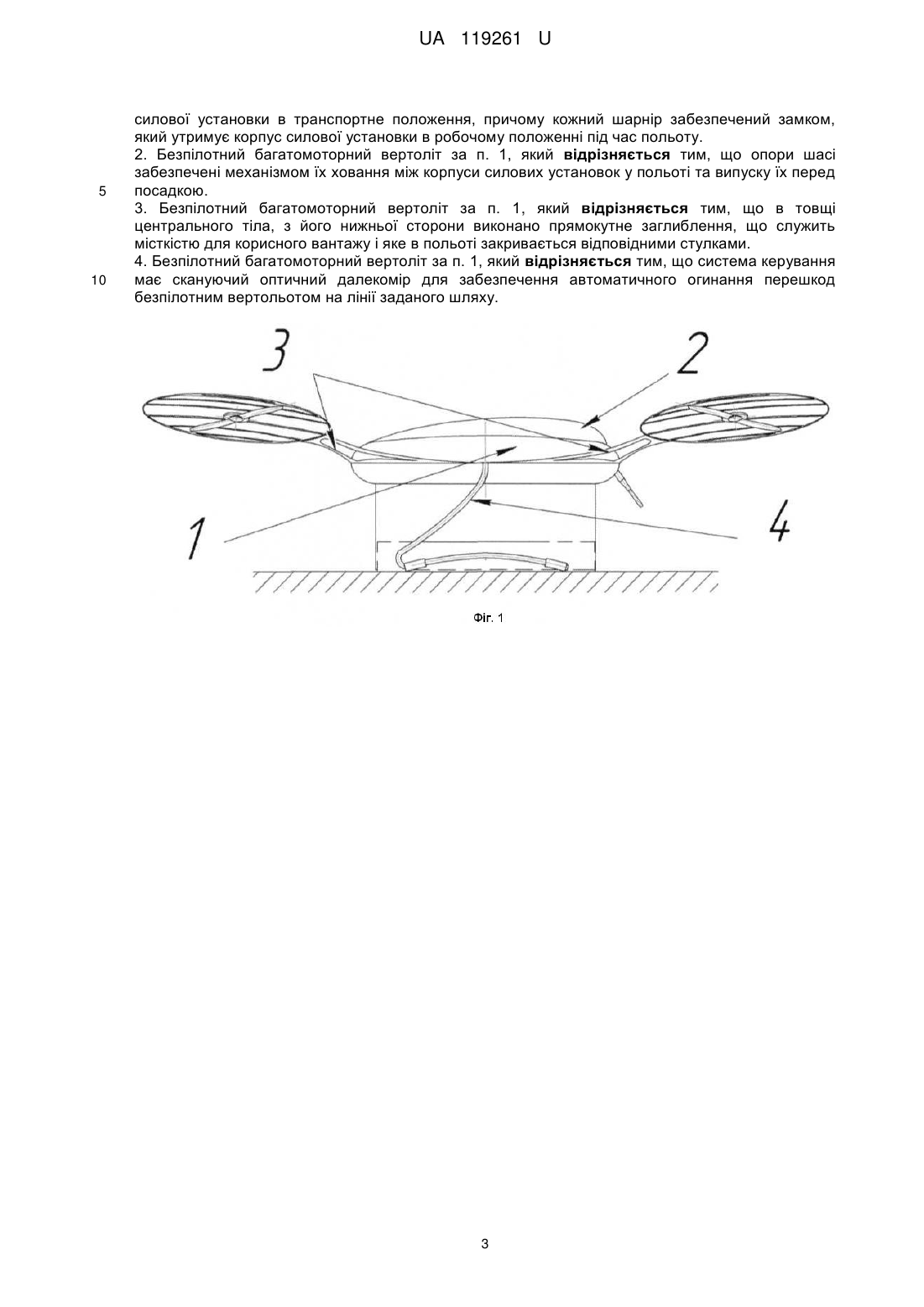
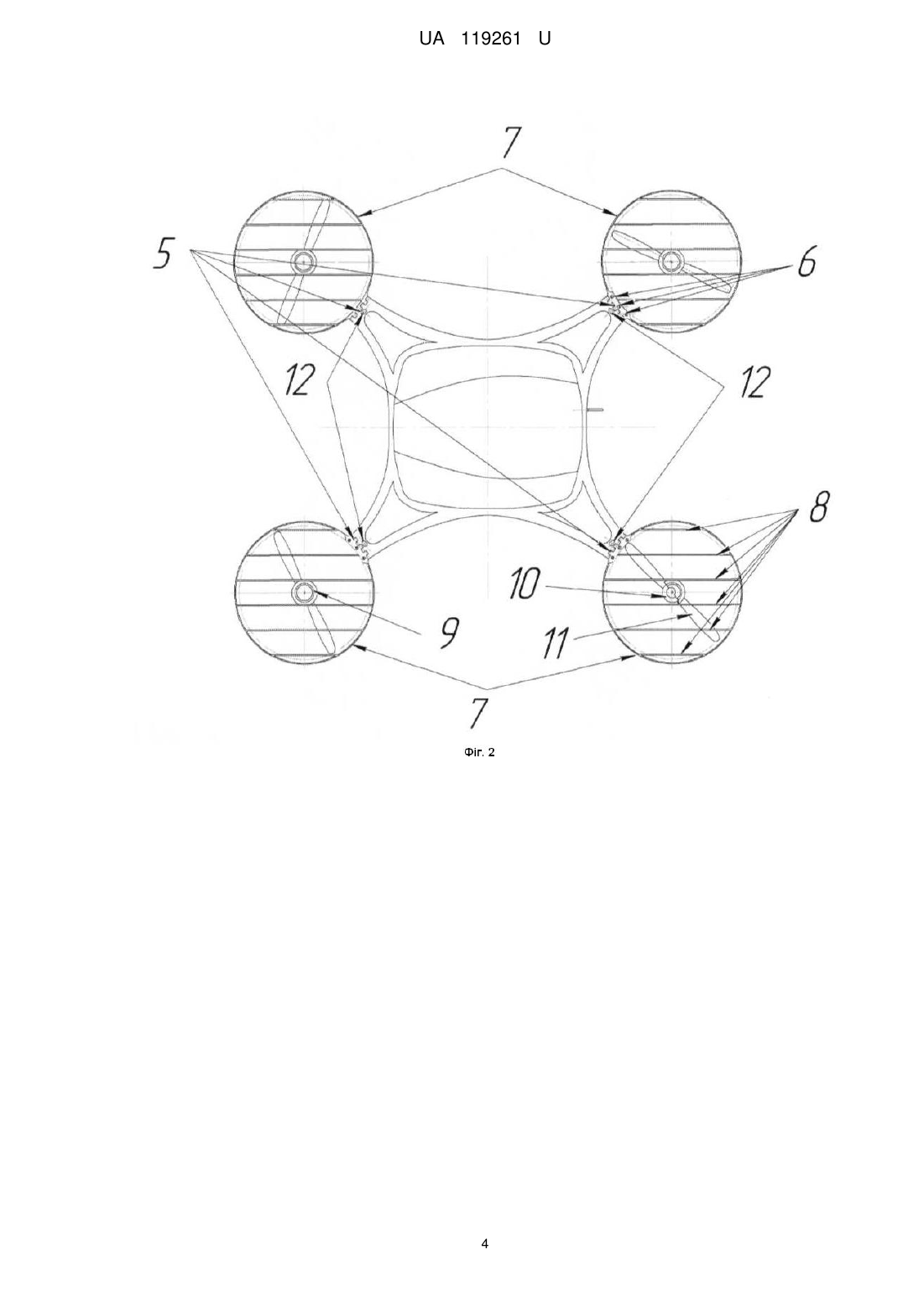
1. Безпілотний багатомоторний вертоліт, що містить несучі балки-промені, шарнірно закріплені біля центрального тіла, які для транспортування повертаються разом з двигунами вниз близько до вертикалі, а опори шасі виконані з дискретно регульованою висотою, який відрізняється тим, що чотири несучі балки-промені виконані "л"-подібними та суцільно з прямокутним центральним тілом і розташовані вздовж його діагоналей, силові установки встановлено в корпусах - захисних круглих ободах, що містять шість паралельних діаметру спиць, причому спиці розташовуються паралельно вектору швидкості, мають напівеліптичну при вигляді збоку форму, а дві середні з'єднані між собою ложементом кріплення двигуна, що виконаний заодно із спицями та розташований в центрі кола, що утворює круглий обід, на периметрі кожного ободу розташовано половину поворотного шарніра, який відповідною частиною з'єднується з шарніром на вершині кожної "л"-подібної балки-променя, що забезпечує повертання корпусів силової установки в транспортне положення, причому кожний шарнір забезпечений замком, який утримує корпус силової установки в робочому положенні під час польоту.
2. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що опори шасі забезпечені механізмом їх ховання між корпуси силових установок у польоті та випуску їх перед посадкою.
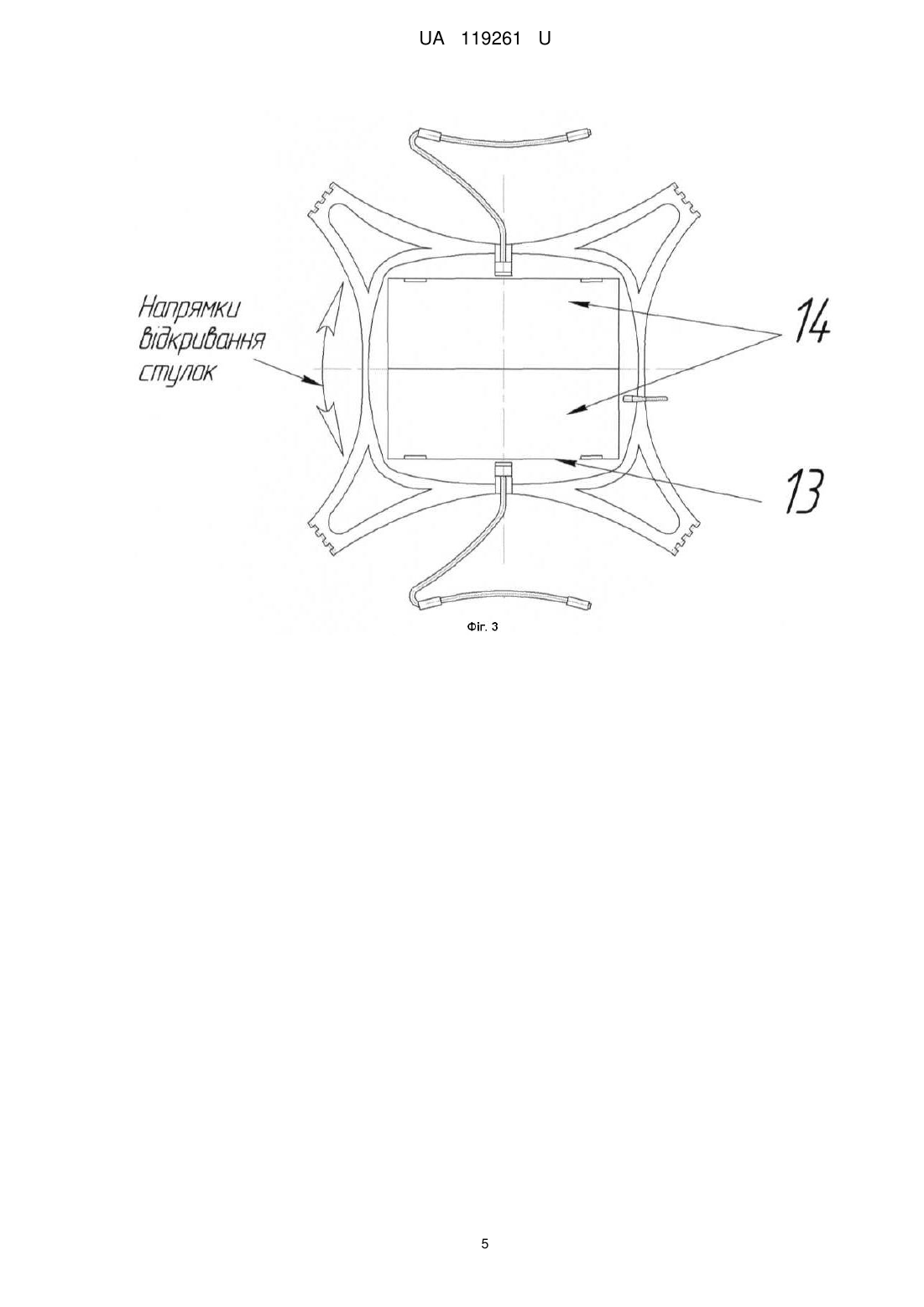
3. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що в товщі центрального тіла, з його нижньої сторони виконано прямокутне заглиблення, що служить місткістю для корисного вантажу і яке в польоті закривається відповідними стулками.
4. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що система керування має скануючий оптичний далекомір для забезпечення автоматичного огинання перешкод безпілотним вертольотом на лінії заданого шляху.
Текст
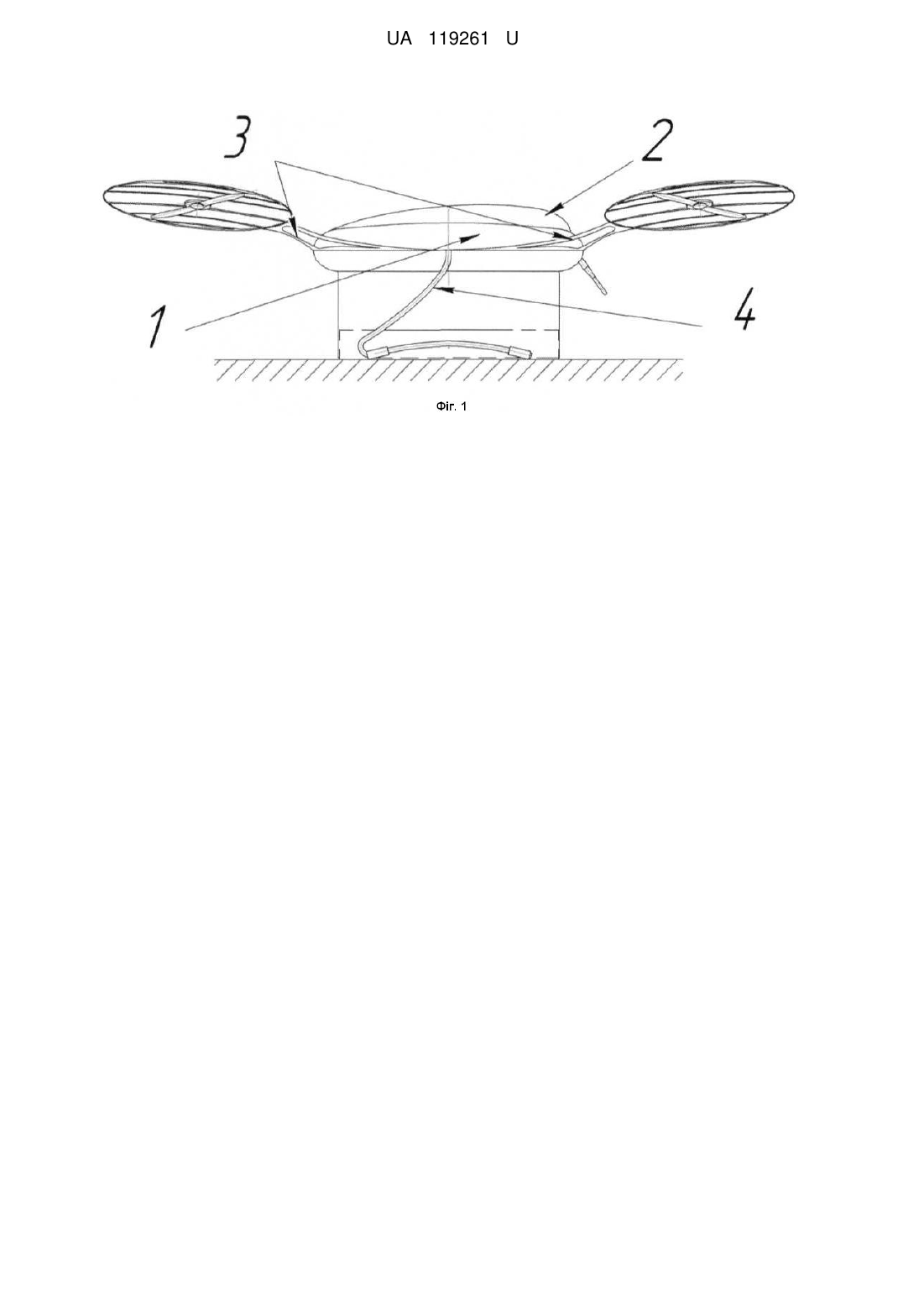
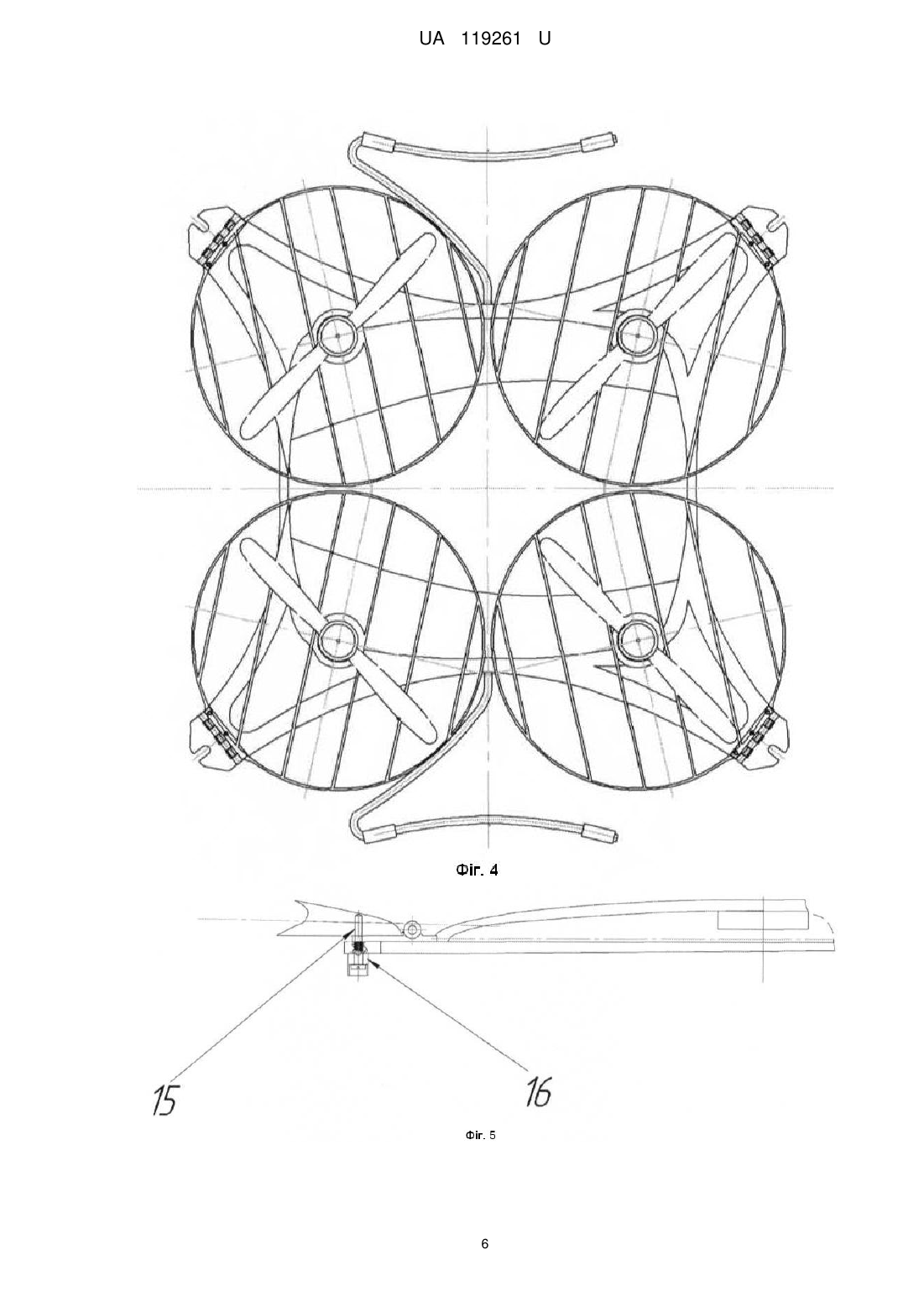
Реферат: Безпілотний багатомоторний вертоліт містить несучі балки-промені, шарнірно закріплені біля центрального тіла, які для транспортування повертаються разом з двигунами вниз близько до вертикалі а опори шасі виконані з дискретно регульованою висотою. Чотири несучі балкипромені виконані "л"-подібними та суцільно з прямокутним центральним тілом і розташовані вздовж його діагоналей, силові установки встановлено в корпусах - захисних круглих ободах, що містять шість паралельних діаметру спиць. При цьому спиці розташовуються паралельно вектору швидкості, мають напівеліптичну при вигляді збоку форму, а дві середні з'єднані між собою ложементом кріплення двигуна, що виконаний заодно із спицями та розташований в центрі кола, що утворює круглий обід. На периметрі кожного ободу розташовано половину поворотного шарніра, який відповідною частиною з'єднується з шарніром на вершині кожної "л"подібної балки-променя, що забезпечує повертання корпусів силової установки в транспортне положення. Кожний шарнір забезпечений замком, який утримує корпус силової установки в робочому положенні під час польоту. UA 119261 U (12) UA 119261 U UA 119261 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до безпілотних повітряних суден (БПС) вертикального зльоту і посадки для перевезення невеликих вантажів у вигляді пакування з піцою, взуттям та інших невеликих товарів побутового призначення. Безпілотні повітряні судна вертолітного типу з електричною силовою установкою стрімко набувають практичного застосування у господарській діяльності людини, зокрема для швидкої доставки різноманітних невеликих вантажів в межах торговельних сіток або в поштових компаніях. Це можна пояснити з одного боку довершеністю сучасних технологій, що застосовуються в них, а з іншого боку - їх здатністю до вертикального зльоту та посадки. Як приклад технології можна навести чотиримоторне БПС "SENSOCOPTER", Німеччина [1]. Шестимоторну схему можна представити на прикладі БПС "АР-200", Німеччина [2]. Вказані зразки вертольотів призначені для спостереження з повітря. Безпосередньо для перевезення вантажів призначені БПС зазначені в першоджерелах [3] та [4]. Недоліками вказаних безпілотних вертольотів є одинарні промені-балки, що не забезпечує їм відповідної жорсткості, великі габарити по краях гвинтів при їх транспортуванні, небезпека для персоналу та клієнтів від вільних, незакритих по периметру повітряних гвинтів, загроза пошкодження повітряних гвинтів об вертикальні перешкоди, високий аеродинамічний опір від опор шасі, що не ховаються, відсутність внутрішнього простору в центральному тілі для корисного вантажу, а також відсутність бортових пристроїв, що дозволяють вертольоту автоматично огинати перешкоди для запобігання його зіткненню з ними. Найближчим за технічним рішенням вибрано багатомоторний безпілотний вертоліт, що вказаний у джерелі [5]. В основу корисної моделі поставлено задачу підвищення жорсткості балок-променів силових установок, підвищення безпеки персоналу та клієнтів від обертових повітряних гвинтів, захисту повітряних гвинтів від ударів об вертикальні перешкоди, зниження габаритних розмірів вертольота під час транспортування, зниження шкідливих аеродинамічних опорів у польоті на крейсерській швидкості, забезпечення у центральному тілі відповідного простору для корисного навантаження, а також підвищення рівня безпеки польотів вертольота у повітряному просторі. Поставлена задача вирішується тим, що чотири несучі балки-промені виконані "л"подібними та суцільно з прямокутним центральним тілом і розташовані вздовж його діагоналей, силові установки встановлено в корпусах - захисних круглих ободах, що містять шість паралельних діаметру спиць, причому спиці розташовуються паралельно вектору швидкості, мають напівеліптичну при вигляді збоку форму, а дві середні з'єднані між собою ложементом кріплення двигуна, що виконаний заодно із спицями та розташований в центрі кола, що утворює круглий обід, на периметрі кожного ободу розташовано половину поворотного шарніра, який відповідною частиною з'єднується з шарніром на вершині кожної "л"-подібної балки-променя, що забезпечує повертання корпусів силової установки в транспортне положення, причому кожний шарнір забезпечений замком, який утримує корпус силової установки в робочому положенні під час польоту. Безпілотний багатомоторний вертоліт, у якому згідно з корисною моделлю, опори шасі забезпечені механізмом їх ховання між корпуси силових установок у польотіта випуску їх перед посадкою. Безпілотний багатомоторний вертоліт, у якому згідно з корисною моделлю, в товщі центрального тіла, з його нижньої сторони виконано прямокутне заглиблення, що служить місткістю для корисного вантажу, і яке в польоті закривається відповідними стулками. Безпілотний багатомоторний вертоліт, у якому згідно з корисною моделлю, система керування має скануючий оптичний далекомір для забезпечення автоматичного огинання перешкод безпілотним вертольотом на лінії заданого шляху. На Фіг. 1 показано проекцію вигляду збоку безпілотного багатомоторного вертольота з шасі в посадковому положенні, опущеними донизу стулками місткості та корисним вантажем, що знаходиться на землі. На Фіг. 2 показано проекцію вигляду зверху безпілотного багатомоторного вертольота. На Фіг. 3 показано проекцію вигляду знизу безпілотного багатомоторного вертольота без корпусів силових установок та з піднятим шасі. На Фіг. 4 показано вигляд безпілотного багатомоторного вертольота із корпусами силових установок, повернутих у транспортне положення. На Фіг. 5 показано проекцію вигляду збоку замка повороту корпусу силової установки (замок закрито; корпус силової установки у робочому положенні). На Фіг. 6 показано проекцію вигляду зверху замка повороту корпусу силової установки (положення закрито). 1 UA 119261 U 5 10 15 20 25 30 35 40 45 На Фіг. 7 показано проекцію вигляду збоку замка повороту корпусу силової установки (замок відкрито; корпус силової установки у транспортному положенні). 3 На Фіг. 8 показано вигляд /4 зліва корисної моделі безпілотного багатомоторного вертольота з шасі, що займає положення "випущено". Приклад корисної моделі. Безпілотний багатомоторний вертоліт складається з: центрального тіла 1 - корпуса (Фіг. 1), зверху якого розташовано обтічник 2 для радіоелектронного обладнання, а на кутах "л"-подібні промені 3, що виконані заодно з корпусом. Корпус опирається на дві "Δ"- подібні, перевернуті опори шасі 4, що ховаються у польоті. Механізми ховання шасі розташовані у бокових поверхнях корпусу, що паралельні до напрямку польоту. "Л"- подібні промені 3 закінчуються половиною петельного шарніра 5 (Фіг. 2). Друга половина петельного шарніра з'єднана гвинтами 6 із корпусом силової установки, що містить обід 7 та шість паралельних діаметру спиць 8. Між середніми спицями закріплений ложемент 9 електродвигуна 10, оснащеного повітряним гвинтом 11. Замок 12, що утримує корпус силової установки в польотному положенні розташований знизу шарніра. Знизу центрального тіла (Фіг. 3) виконано прямокутне заглиблення 13, що служить місткістю для корисного вантажу, і яке в польоті закривається відповідними стулками 14. У транспортному положенні (Фіг. 4), корпуси силових установок, після розкривання замків, вручну повертаються кругом осей своїх шарнірів на кут біля 170°, чим досягається значне зменшення габаритів вертольота. Замок корпусу силової установки (Фіг. 5) складається з осі 15 та поворотного двоплечого важеля 16, який може займати два положення: положення "закрито" та положення "відкрито". У положенні "закрито" (Фіг. 6) важіль 16 знаходиться поперечно до осі прорізу, виконаному в петельному півшарнірі 17, що з'єднаний з корпусом силової установки. У положенні "відкрито" важіль 16 знаходиться поздовж до осі прорізу, що дозволяє повернути корпус силової установки в транспортне положення. Утримування важеля 16 в положенні "закрито" відбувається за рахунок кулькового фіксатора 18 з пружиною 19; при цьому кулька входить у лунку 20 (Фіг. 7), що виконана на торцевій поверхні важеля 16. 3 Вигляд /4 зліва корисної моделі безпілотного багатомоторного вертольота з опущеним шасі показано на Фіг. 8. При повернутих силових установках в транспортному положенні безпілотний багатомоторний вертоліт має розміри 1100 мм965 мм215 мм. Джерела інформації: 1. Unmanned Vehicles handbook 2008. The ShephardPress Ltd 268 Bath Road, Slough, Berkshire, SL14 DX, UK. p. 112. th 2. 2012 RPAS Yearbook-RPAS The Global Perspektive-10 Edition-June 2012-Blyenburg & Cowww.uvs-info.com-p. 111. 3. Интернетресурс http://www.m24.ru/articles/70444.//B столице протестируют коптеры для доставки пиццы и почты. 4. Интернетресурс https://www.youtube.com/watch?v=WGspihbblbE// Дроны - посильные от компании Yota 5. Багатомоторний безпілотний вертоліт.// Пат. України на корисну модель № 103209. Опубліковано: 10.12.2015. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 1. Безпілотний багатомоторний вертоліт, що містить несучі балки-промені, шарнірно закріплені біля центрального тіла, які для транспортування повертаються разом з двигунами вниз близько до вертикалі, а опори шасі виконані з дискретно регульованою висотою, який відрізняється тим, що чотири несучі балки-промені виконані "л"-подібними та суцільно з прямокутним центральним тілом і розташовані вздовж його діагоналей, силові установки встановлено в корпусах - захисних круглих ободах, що містять шість паралельних діаметру спиць, причому спиці розташовуються паралельно вектору швидкості, мають напівеліптичну при вигляді збоку форму, а дві середні з'єднані між собою ложементом кріплення двигуна, що виконаний заодно із спицями та розташований в центрі кола, що утворює круглий обід, на периметрі кожного ободу розташовано половину поворотного шарніра, який відповідною частиною з'єднується з шарніром на вершині кожної "л"-подібної балки-променя, що забезпечує повертання корпусів 2 UA 119261 U 5 10 силової установки в транспортне положення, причому кожний шарнір забезпечений замком, який утримує корпус силової установки в робочому положенні під час польоту. 2. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що опори шасі забезпечені механізмом їх ховання між корпуси силових установок у польоті та випуску їх перед посадкою. 3. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що в товщі центрального тіла, з його нижньої сторони виконано прямокутне заглиблення, що служить місткістю для корисного вантажу і яке в польоті закривається відповідними стулками. 4. Безпілотний багатомоторний вертоліт за п. 1, який відрізняється тим, що система керування має скануючий оптичний далекомір для забезпечення автоматичного огинання перешкод безпілотним вертольотом на лінії заданого шляху. 3 UA 119261 U 4 UA 119261 U 5 UA 119261 U 6 UA 119261 U 7 UA 119261 U Комп’ютерна верстка М. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 29/00
Мітки: вантажів, багатомоторний, вертоліт, безпілотний, перевезення, невеликих
Код посилання
<a href="https://ua.patents.su/10-119261-bezpilotnijj-bagatomotornijj-vertolit-dlya-perevezennya-nevelikikh-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Безпілотний багатомоторний вертоліт для перевезення невеликих вантажів</a>
Безпілотний багатомоторний вертоліт

Номер патенту: 103209
Опубліковано: 10.12.2015
Автори: Матійчик Михайло Петрович, Харченко Володимир Петрович, Рибальченко Олександр Сергійович
МПК: B64C 29/00
Мітки: багатомоторний, безпілотний, вертоліт
Формула / Реферат:
Безпілотний багатомоторний вертоліт, який містить шість електродвигунів з повітряними гвинтами, кожен з яких окремо встановлений на кінцях несучих балок-променів, що нерухомо закріплені на центральному тілі, та опори шасі, які нерухомо закріплені на несучих балках-променях, який відрізняється тим, що несучі балки-промені шарнірно закріплені біля центрального тіла і для транспортування повертаються разом з двигунами вниз близько до вертикалі,...
Вертоліт безпосередньої вогневої підтримки
Номер патенту: 67325
Опубліковано: 15.06.2004
Автори: Куровська Тетяна Юріївна, Комаров Володимир Олександрович, Мосов Сергій Петрович, Микитюк Олександр Григорович
МПК: B64C 27/00
Мітки: вогневої, підтримки, безпосередньо, вертоліт
Формула / Реферат:
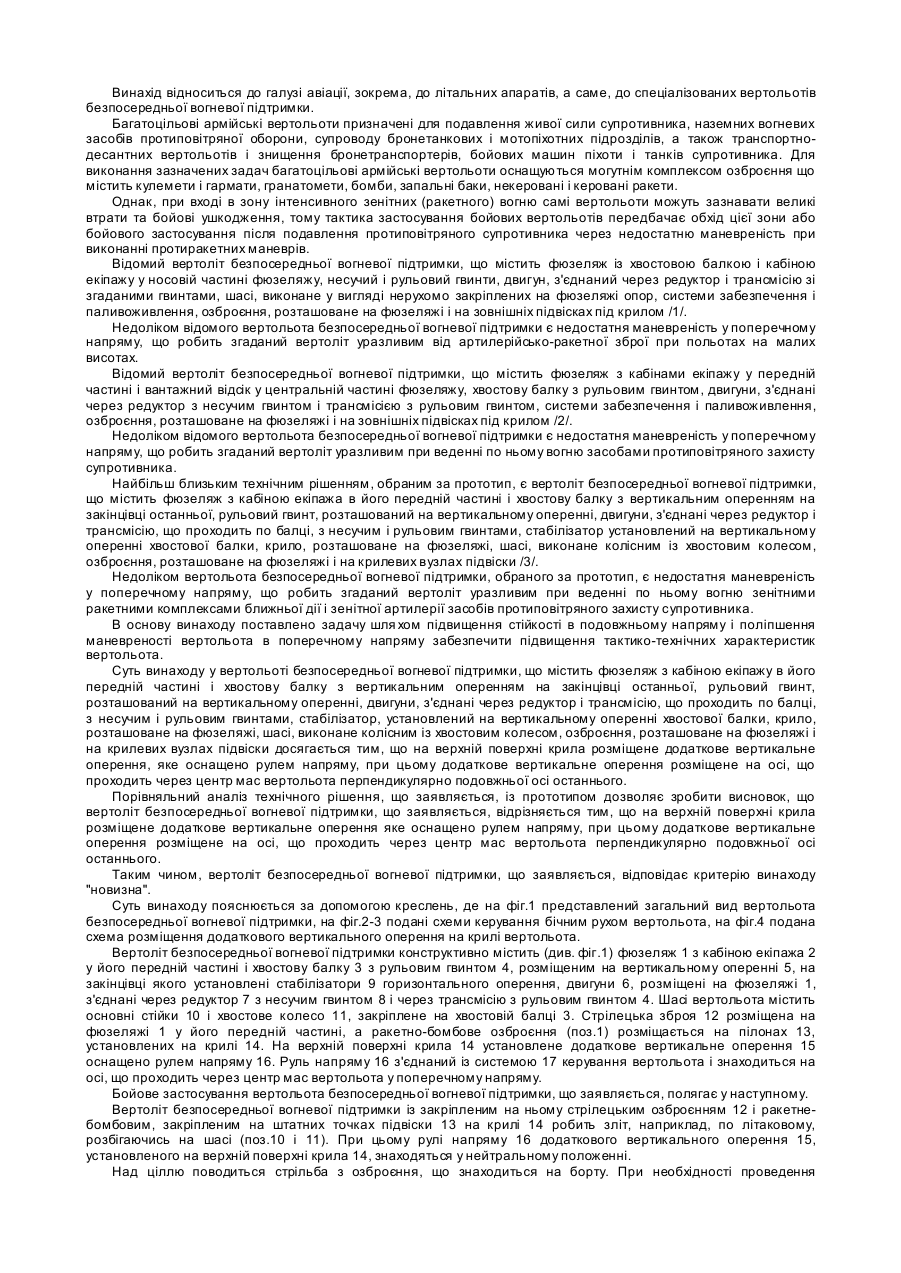
Вертоліт безпосередньої вогневої підтримки, що містить фюзеляж з кабіною екіпажу в його передній частині і хвостову балку з вертикальним оперенням на кінці останньої, рульовий гвинт, розташований на вертикальному оперенні, двигуни, з'єднані через редуктор і трансмісію, що проходить по балці, з несучим і рульовим гвинтами, стабілізатор, установлений на вертикальному оперенні хвостової балки, крило, розташоване на фюзеляжі, шасі, виконане...
Автотранспорт для перевезення вантажів
Номер патенту: 24871
Опубліковано: 10.07.2007
Автор: Субботовський Григорій Григорович
МПК: B60P 3/00, B62D 63/00
Мітки: вантажів, автотранспорт, перевезення
Формула / Реферат:
1. Автотранспорт для перевезення вантажів, що містить металевий каркас, на якому закріплено обшивку, який відрізняється тим, що металевий каркас змонтовано на силовій платформі, установленій на рамі шасі, обшивка разом з металевим каркасом утворюють тумбу з внутрішнім приміщенням для перевезення комплектуючих виробів та монтажних матеріалів, по периметру тумби установлені незнімні силові кронштейни для кріплення поясами великогабаритного...
Бойовий вертоліт

Номер патенту: 67326
Опубліковано: 15.06.2004
Автори: Куровська Тетяна Юріївна, Мосов Сергій Петрович, Микитюк Олександр Григорович, Комаров Володимир Олександрович
МПК: B64C 27/00
Формула / Реферат:
Бойовий вертоліт, що містить фюзеляж із кабінами екіпажу в передній частині і вантажним відсіком у центральній частині, хвостову балку з рульовим гвинтом, двигуни, сполучені через редуктор із несучим гвинтом і трансмісією з рульовим гвинтом, крило, установлене на фюзеляжі, висувне шасі із носовим колесом, системи забезпечення і паливопостачання, озброєння, розташоване на фюзеляжі і на зовнішніх підвісках під крилом, який відрізняється тим, що...
Безпілотне повітряне судно для перевезення малогабаритних вантажів
Номер патенту: 119235
Опубліковано: 11.09.2017
Автор: Матійчик Михайло Петрович
МПК: B64C 39/02, G05D 1/00, B64C 1/00
Мітки: перевезення, малогабаритних, судно, безпілотне, вантажів, повітряне
Формула / Реферат:
Безпілотне повітряне судно (БПС) для перевезень невеликих (малогабаритних) вантажів, що містить фюзеляж, крила, хвостове оперення, шасі, силову установку на базі поршневого двигуна внутрішнього згорання і повітряним гвинтом, причому крило має товстий профіль і оснащене механізацією у вигляді закрилка та флаперону, а хвостове оперення виконане V-подібним, яке відрізняється тим, що фюзеляж виконаний подовженим з внутрішнім розміщенням...
Попередній патент: Система голосування з множинним доступом
Наступний патент: Спосіб каналізування нафтовмісних стічних вод нафтопереробних заводів
Випадковий патент: Тягова мережа в системі електропостачання з безконтактною передачею енергії на електровози